第 章 汽车操纵稳定性
汽车理论:第四章 汽车的行驶安全性操纵稳定性

▪ 将上式整理,可得不发生翻车的最大坡度角由下
式确定: ▪
tg max
b hg
▪ 当道路的坡度角 max 时,汽车即失去操纵并 可能绕后轴翻倒。
分析
▪ 汽车重心至后轴的距离b越大,重心高度越小,
则汽车越不容易发生绕后轴翻倒,汽车的纵向稳
定性越好。
▪ 在正常装载情况下,式
tg max
b hg
是能够满足的。
不平道路的侧向冲击等多种。
▪ 汽车在侧向力的作用下,如车轮的侧向反作用力 达到附着力时,汽车将沿侧向力的作用方向而滑 移。
▪ 侧向力同时将引起左、右车轮法向反作用力的改 变,当一侧车轮的法向反作用力变为零时,将发 生侧向翻车。
汽车在有侧坡的弯道上等速转向行驶的受力图
FCY
β hg
FZL
FYL
B
FZR
▪
将式
FZ 2
aG cos hgG sin L
代入式 Ft max G sin max FZ 2
中,
G sin max
FZ 2
G L
a cos hg sin
▪ 式两边同除以Gconα
Ltg a hg tg
L tg hg tg a
▪ 整理得
tg max
L
a hg
▪ 显然,如果 即 tg max tg max max max
hgG L
s in
FZ 2
aG cos
hgG sin
L
▪ 水平路面 0
b FZ1 G L
FZ 2
G
a L
1、汽车不发生后翻的最大坡度角 m ax
▪ 当前轮的径向反作用力 FZ1 0 时,
▪ 由上式可得: bG cos hgG sin 0
汽车操纵稳定性
第5章 汽车的操纵稳定性学习目标通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。
汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。
在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。
此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。
一辆操纵性能良好的汽车必须具备以下的能力:(1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。
(2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。
操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。
如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。
汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。
它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。
节汽车行驶的纵向和横向稳定性 5.1.1 汽车行驶的纵向稳定性汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。
当道路坡度大到一定程度时,前轮的地面法向反作用力为零。
在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。
汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。
这两种情况均使汽车的行驶稳定性遭到破坏。
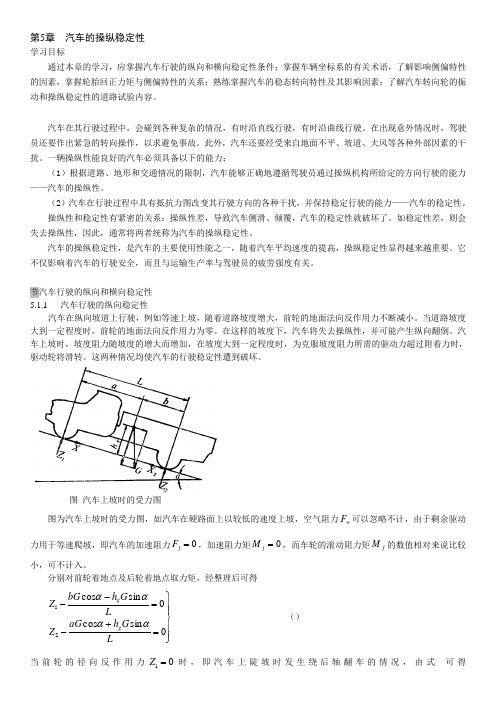
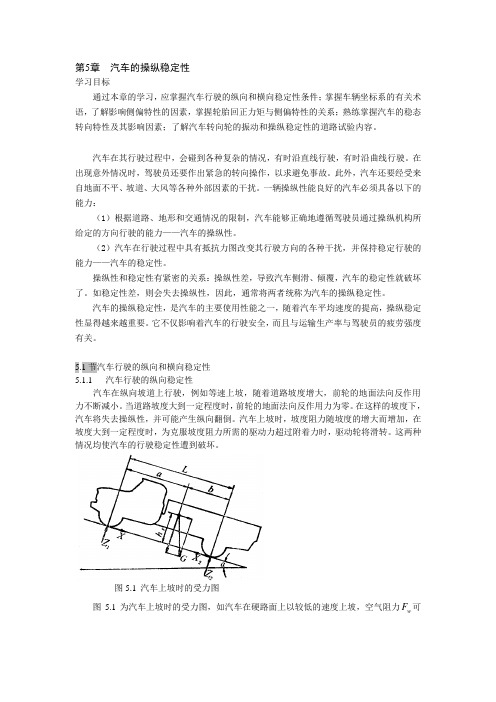
图 汽车上坡时的受力图图为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力w F 可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力0=j F ,加速阻力矩0=j M ,而车轮的滚动阻力矩f M 的数值相对来说比较小,可不计入。
吉林大学汽车理论第五章 操纵稳定性

高速急收油门
Fb
FX
T Z
28/81
5 轮胎外倾角对侧偏力的作用
FY k y
内侧
F y
Tire camber angle FY 外侧
W
FY FY
O'
0
FY
0 0
0
0
29/81
0
uu un
Neutral steering
K=0中性转向
uo
汽车瞬时速度矢量
Over steering
K 0过度转向
5.1 概述
9/81
r1
T
1 . 05 r 0
r0
r (t )
0 . 95 r 0
sw
反应时间
转向盘转角
sw 0
r1 r0
t t
100 % 超调量
handling and stability performance Manoeuverability
1/81
5 汽车操纵稳定性
5.1 5.2 5.3 5.4 概 述 轮胎侧偏特性 线性二自由度汽车模型对前轮角输入响应 汽车操纵稳定性与悬架、转向系的关系
2/81
5.1 概述
定义:在驾驶员不感觉过分紧张、疲 劳的条件下,汽车能按照驾驶员通过 转向系及转向车轮给定的方向行驶; 且当受到外界干扰时,汽车能抵抗干 扰而保持稳定行驶的能力。
O
u
O
FY
u
u'
Y X
Fy
C
Fy
v
汽车操纵稳定性
(4)用转向半径表示汽车稳态转向特性
(5)用静态储备系数S·M来表征汽车稳态转向特性
S M a' a k2 a L k1 k2 L
3.汽车稳态转向特性对操纵稳定性的影响
汽车不能具有过多转向特性。汽车具有中性转向特性 也不好,因为汽车本身或外界使用条件的某些变化,中性 转向特性的汽车常会转变成过多转向特性而使操纵稳定性 变差。不足转向特性的汽车转向灵敏性较差,汽车的不足 转向性不可过大。因此,只有具有适度不足转向特性的汽 车,才具有良好的操纵稳定性,才能保持行车安全。《机 动车运行安全技术条件》(GB7258-2004)规定,汽车(三 轮汽车除外)应具有适度的不足转向特性。
6.4.2 轮胎
1.轮胎气压 2.轮胎结构型式
6.4.3 汽车驱动方式
转向时随施加于轮胎上切向力的增加, 轮胎的侧偏刚度减小,使汽车产生的侧偏角增 大。因此,后轮驱动的汽车转向时施加驱动力, 后轮侧偏刚度减小,使后轮侧偏角增加,有减 小不足转向、向过多转向转化的趋势。前轮驱 动的汽车转向时施加驱动力,前轮侧偏刚度减 小,使前轮侧偏角增加,有增加不足转向的作 用。
第三节
汽车稳态转向特性与瞬态响应
主讲教师:刁立福
由转向盘输入引起的汽车运动状况,可分为 不随时间而变化的稳态与随时间变化的瞬态两种, 相应的汽车响应称为稳态响应与瞬态响应。
6.3.1 汽车稳态转向特性
1.汽车稳态转向的几何关系
L R
(1
2)
2.汽车稳态转向特性的表示方法
(1)用汽车稳定性因数表示汽车稳态转向特性
过多转向特性增加。 对载货汽车来说,由于后轮载荷的变化常比前轮载
荷变化大3~4倍,因而如果在一定的侧向加速度下,空 载时前轮侧偏角往往比后轮侧偏角大;那么满载时后轮 侧偏角则往往比前轮侧偏角大得多。因此,加大后轴载 荷会增大汽车的过多转向的倾向,这可以说是所有汽车 的共同的特性。而载货汽车由于其后轴载荷变化幅度大, 所以重载时往往出现过多转向的倾向。
汽车操作稳定性ppt课件
➢ 转向盘最大自由转动量的测量一般采用转向力— 角位移仪器来测量。
49
二、车辆的最小转弯直径和内外轮转角
➢ 车辆转向时,从瞬时转向中心到 前外轮轮辙中心线的距离即为转 弯半径。
➢ 二倍的转弯半径即为转弯直径, 最小转弯直径不得大于24m。
➢ 无离心力时,存在不侧滑最 大角。
V0maxV0max gR
gBR 2hg
B
2 hg
45
3、汽车侧向稳定性系数
➢ 从安全角度,侧滑发生在侧翻前 ➢ 侧向稳定系数 ➢ 尽量降低汽车重心高度
46
表5-4 几种汽车侧翻阈值的范围
车辆类型 跑车 微型轿车 豪华轿车 轻型客货两用车 客货两用车 中型货车 重型货车
52
4.4 转向轮侧滑的检测
53
复习汽车构造的知识
54
55
56
前轮前束:脚尖向内,所谓“内八字脚”的意思,指的是左右前轮分别 向内。采用这种结构目的是修正上述前轮外倾角引起的车轮向外侧转动。57
58
一、侧滑量与车轮定位的关系
➢ 外倾角引起的侧滑——向 内滑动
➢ 前束引起的侧滑——向外 滑动
垂直载荷过 大时,轮胎与 地面接触区的 压力分布不均 匀,使 k反而有 所减小。
17
α一定时, W大,FY大。
FY = k ,即k 大。
18
(3)轮胎气压高,k大
19
(4)FX 越大,FY 越小
FY1
FY2
FX2
FX1
20
(5)路面干湿状态
21
轮胎胎面、路面粗糙程度、水层厚度与滑水现象的关系
第5章 汽车操纵稳定性
第5章汽车的操纵稳定性学习目标通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。
汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。
在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。
此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。
一辆操纵性能良好的汽车必须具备以下的能力:(1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。
(2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。
操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。
如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。
汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。
它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。
5.1节汽车行驶的纵向和横向稳定性5.1.1 汽车行驶的纵向稳定性汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。
当道路坡度大到一定程度时,前轮的地面法向反作用力为零。
在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。
汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。
这两种情况均使汽车的行驶稳定性遭到破坏。
图5.1 汽车上坡时的受力图F可图5.1为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力w以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力0=j F ,加速阻力矩0=j M ,而车轮的滚动阻力矩f M 的数值相对来说比较小,可不计入。
汽车理论---第五章 汽车操纵稳定性pt (1)

工字形车架分别通过前、
后悬架的侧倾中心m01和m02 与前后轴相铰接,同时又通过
前后悬架的弹性元件分别与前、
后轴相连接。
19
第四节 汽车操纵稳定性与悬架的关系
TΦr2
TΦr1
TΦr
20
第四节 汽车操纵稳定性与悬架的关系
Fsy Fs1y Fs2 y
Fs1y bs Fsy L
Fs2 y as Fsy L
FZ 1
汽车趋于增加不足转向 汽车趋于减少不足转向
bs FZ 1 ( Fsy h1 K r1Φr Fu1 y hu1 ) / B1 L as FZ 2 ( Fsy h2 K r2Φr Fu2 y hu2 ) / B2 L
24
第四节 汽车操纵稳定性与悬架的关系
三、侧倾外倾——侧倾时车轮外倾角的变化
2
12
第四节 汽车操纵稳定性与悬架的关系
2)悬架的侧倾角刚度
1 dT K lB 2 dΦr 2
K r
K r
1 K lB 2 2
2
1 Bm Ks 2 n
13
第四节 汽车操纵稳定性与悬架的关系
4.车厢侧倾角及侧倾力矩
操纵稳定性 侧倾角改变了外倾角γ; 侧倾角改变了内外车轮的垂直 载荷FZ,从而改变侧偏角α。 Φr大,水平晃动大, 乘客不稳定,无安全感。 平顺性 Φr小, Kr ks →地面不平时有冲击感。 在确定悬架总侧倾角刚度 KΦr 时,要
双横臂悬架前轮外倾角与地面侧向力方向相
反,有增大侧偏角(绝对值)的作用。
28
第四节 汽车操纵稳定性与悬架的关系
车厢侧倾时不同形式悬架所引起的车轮外倾角的γ变化
单纵臂悬架前轮外倾角与地面侧向力方向相反。
汽车理论(第五版) 第五章(6-9节)
7
第六节 汽车操纵稳定性与传动系的关系
二、地面切向反作用力控制转向特性 的基本概念简介
1.切向力对 r的影响 切向力对ω 切向力对
8
第六节 汽车操纵稳定性与传动系的关系
2.切向力控制方法 切向力控制方法
1)总切向反作用力控制
ABS就是总制动力控制,保证较佳的滑动率,提 就是总制动力控制,保证较佳的滑动率, 就是总制动力控制 高制动时汽车的方向稳定性。 高制动时汽车的方向稳定性。 TCS 是总驱动力控制,防止出现过大的滑转率, 是总驱动力控制,防止出现过大的滑转率, 提高驱动时汽车的方向稳定性。 提高驱动时汽车的方向稳定性。
பைடு நூலகம்
41
第七节 提高操纵稳定性的电子控制系统
六、装有VSC系统汽车的试验结果
42
第七节 提高操纵稳定性的电子控制系统
六、装有VSC系统汽车的试验结果
43
第七节 提高操纵稳定性的电子控制系统
本节内容结束
下一节
44
第五章 汽车的操纵稳定性
第八节
汽车的侧翻
返回目录
45
第八节 汽车的侧翻
汽车侧翻是指汽车在行驶过程中绕其纵轴线转动90° 汽车侧翻是指汽车在行驶过程中绕其纵轴线转动 ° 或更大的角度, 或更大的角度,以至车身与地面相接触的一种极其危险的 侧向运动。 侧向运动。
28
第七节 提高操纵稳定性的电子控制系统
起始车速为110km/h时正弦 时正弦 起始车速为
起始车速为140km/h时正弦 时正弦 起始车速为
& 转向角输入下的 β − β 曲线
& 转向角输入下的 β − β曲线
29
第七节 提高操纵稳定性的电子控制系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章 汽车的操纵稳定性 学习目标 通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。
汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。一辆操纵性能良好的汽车必须具备以下的能力: (1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。 (2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。 操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。 汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。
5.1节汽车行驶的纵向和横向稳定性 5.1.1 汽车行驶的纵向稳定性 汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。当道路坡度大到一定程度时,前轮的地面法向反作用力为零。在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。这两种情况均使汽车的行驶稳定性遭到破坏。
图5.1 汽车上坡时的受力图 图5.1为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力wF可以忽略不计,由于剩余驱
动力用于等速爬坡,即汽车的加速阻力0jF,加速阻力矩0jM,而车轮的滚动阻力矩fM的数值相对来说比较小,可不计入。 分别对前轮着地点及后轮着地点取力矩,经整理后可得
0sincos0sincos21LGhaGZLGhbG
Z
gg
(5.1)
当前轮的径向反作用力01Z时,即汽车上陡坡时发生绕后轴翻车的情况,由式(5.1) 可得 0sincosGhbGg
将上式整理,可得不发生翻车的最大坡度角由下式确定:
ghbtgmax
(5.2)
当道路的坡度角max时,汽车即失去操纵并可能后轴翻倒。汽车重心至后轴的距离b越大,重心高度gh越小,则汽车越不容易发生绕后轴翻倒,汽车的纵向稳定性越好。在正常装载情况下,式(5.2)是能够满足的。 在上述稳定分析中,尚未考虑驱动轮滑转的可能性。后轮驱动的汽车,以较低速度等速上坡时,驱动轮不发生滑转的临界状态为
2maxmaxsinZGFt
(5.3)
式中:max——汽车后轮不发生滑转所能克服的最大道路坡度角。 驱动轮滑转与附着系数,汽车重心的位置及汽车的驱动型式有关。 将式(5.2)代入式(5.3)中,整理得
ghLatgmax (5.4)
显然,如果 maxtg<maxtg 即 max<max 则当汽车遇有坡度角为max的坡道时,驱动轮因受附着条件的限制而滑转,地面不能提供足够的驱动力以克服坡度阻力,因而无法上坡,也就避免了汽车的纵向翻倒。所以,汽车滑转先于翻倒的条件是
ghLa<ghb
将上式整理得 ghb> (5.5) 上式即为后轮驱动型汽车的纵向稳定性条件。 对于前轮驱动型汽车,其纵向稳定性条件为 L>0
对于全轮驱动型汽车,其纵向稳定性条件为
ghb>
由于现代汽车的重心位置较低,因此上述条件均能满足而有余。但是对于越野汽车,其轴距L较小,重心较高(gh较大),轮胎又具有纵向防滑花纹因而附着系数较大,故其丧失纵向稳定性的危险增加。因此,对于经常行驶于坎坷不平路面的越野汽车,应尽可能降低其重心位置,而前轮驱动型汽车的纵向稳定性最好。 5.1.2 汽车横向稳定性 汽车横向稳定性的丧失,表现为汽车的侧翻或横向滑移。由于侧向力作用而发生的横向稳定性破坏的可能性较多,也较危险。 图5.2 汽车在横向坡道上转向时的受力图 图5.2所示汽车在横向坡路上作等速弯道行驶时的受力图。随着行驶车速的提高,在离心力cF作用下,汽车可能以左侧车轮为支点向外侧翻。当右侧车轮法向反力0zRF时,开始侧翻。因此,汽车绕左侧车轮侧翻的条件为
gcgchGBGBFhFsin2cos2sincos (5.6) 如汽车转弯半径为R,行驶速度为u,则
gRGuFc2
将cF代入式(5.6),可求出在横向坡道上不发生向外侧翻的极限车速为
tan2)tan2(maxBhhBgRugg
(5.7)
由式(5.7)可见,当横向坡度值Bhg2tan时,式中分母为零,maxu,说明汽车在此坡度弯道行驶时,任意速度也不会使汽车绕外侧车轮侧翻。因此在公路建设上常将弯道外筑有一定的坡度,以提高汽车的横向稳定性。 若在水平路面上(0),汽车转弯行驶不发生侧翻的极限车速为
ghgRBu2max (5.8)
比较式(5.7)和式(5.8),式(5.7)的maxu显然比式(5.8)大。 汽车在横向坡道上行驶发生侧滑的临界条件为 )cossin(sincosGFGFcc
式中 ——附着系数。 整理后,得汽车在侧滑前允许的最大速度为
tan1)tan(max
gRu
当1tan时,u,则以任何车速行驶也不发生侧滑。在0的水平道路上,汽车侧滑前所允许最大速 度为 gRu
max (5.9)
为了行驶安全,应使侧滑发生在侧翻之前,即maxmaxuu
tan2)tan2(tan1)tan(BhhBgRgRgg
整理后得 ghB2 (5.10) 比值ghB2称为侧向稳定性系数,侧翻只能在附着系数大于侧向稳定性系数的道路上才能发生。在干燥沥青路面上,=0.7~0.8,一般满足式(5.10)的条件。只有当汽车重心提高后,减小了横向稳定性系数,才增加了翻车的危险。
5.2节 轮胎的侧偏特性 轮胎的侧偏特性是研究汽车操纵稳定性理论的出发点。 5.2.1 轮胎的坐标系与术语
图5.3 车轮坐标系 图5.3示出车轮的坐标系,其中车轮前进方向为x轴的正方向,向下为z轴的正方向,在x轴的正方向的右侧为y轴的正方向。 (1)车轮平面 垂直于车轮旋转轴线的轮胎中分平面。 (2)车轮中心 车轮旋转轴线与车轮平面的交点。
(3)轮胎接地中心 车轮旋转轴线在地平面(xOy平面)上的投影(y轴),与车轮平面的交点,也就是坐标原点。 (4)翻转力矩xT 地面作用于轮胎上的力,绕x轴的力矩。图示方向为正。
(5)滚动阻力矩yT 地面作用于轮胎上的力,绕y轴的力矩。图示方向为正。 (6)回正力矩zT 地面作用于轮胎上的力,绕z轴的力矩。图示方向为正。 (7)侧偏角 轮胎接地中心位移方向(车轮行驶方向)与x轴的夹角。图示方向为正。 (8)外倾角 xOz平面与车轮平面的夹角。图示方向为正。 5.2.2 轮胎的侧偏现象 如果车轮是刚性的,在车轮中心垂直于车轮平面的方向上作用有侧向力yF。当侧向力yF不超过车轮与地面的
附着极限时,车轮与地面没有滑动,车轮仍沿着其本身行驶的方向行驶;当侧向力yF达到车轮与地面间附着极限时,车轮与地面产生横向滑动,若滑动速度为Δu,车轮便沿某一合成速度u′方向行驶,偏离了原行驶方向,如图5.4所示。
图5.4 有侧向力作用时刚性车轮的滚动 当车轮有侧向弹性时,即使yF没有达到附着极限,车轮行驶方向也将偏离车轮平面的方向,这就是轮胎的侧
偏现象。下面讨论具有侧向弹性车轮,在垂直载荷为W的条件下,受到侧向力yF作用后的两种情况: (1)车轮静止不动时 由于车轮有侧向弹性,轮胎发生侧向变形,轮胎与地面接触印迹长轴线aa与车轮平面cc不重合,错开Δh,但aa仍平行于cc,如图5.5a所示。
(2)车轮滚动时 接触印迹的长轴线aa,不只是和车轮平面错开一定距离,而且不再与车轮平面cc平行。图5.5b示出车轮的滚动过程中,车轮平面上点Al、A2、A3、…依次落在地面上,形成点1A、2A、3A…,点1A、2A、
3A的连线aa与cc的夹角,即为侧偏角。车轮就是沿着aa方向滚动的。显然,侧偏角的数值是与侧向力yF有
关的。