双足步行机器人仿真
双足行走机器人知识点总结

双足行走机器人知识点总结一、概述双足行走机器人是一种仿生机器人,模拟人类的行走方式,具有独特的工作原理和技术特点。
双足行走机器人的出现,不仅是人工智能和机器人技术的进步,也是对人类步行机理的深入研究和模拟。
双足行走机器人在军事、医疗、救援、娱乐等领域有着广泛的应用前景,具有较高的研究和开发价值。
本文将对双足行走机器人的相关知识点进行总结,包括其工作原理、技术特点、应用领域、研究进展等方面的内容。
二、工作原理双足行走机器人的工作原理主要包括下面几个方面:1. 仿生学原理双足行走机器人的设计初衷是模拟人类的行走方式,因此其工作原理主要受到仿生学的影响。
通过对人类步行过程和髋关节、膝关节等关节运动原理的研究,获得了双足行走机器人的灵感和设计方向。
2. 动力学原理双足行走机器人的行走是由电动机、液压系统或气动系统提供动力,通过控制步进和踢腿的方式,实现机器人步态的模拟。
通过对机械结构的精确设计和动力学方程的优化计算,提高了双足行走机器人的步行效率和稳定性。
3. 控制原理双足行走机器人的控制系统是其核心技术之一,包括硬件控制和软件控制两方面。
在硬件控制方面,采用传感器检测地面状态和机器人姿态,实现对机器人动作的精确控制;在软件控制方面,采用运动规划和动力学优化算法,实现机器人稳定行走和适应不同地形的能力。
4. 感知与决策双足行走机器人的感知与决策系统是其智能化的重要组成部分,包括视觉、声音、激光雷达等传感器,以及路径规划、障碍避障等决策算法。
通过对环境信息的感知和对行为的决策,实现双足行走机器人在复杂环境中的稳定行走和智能导航。
三、技术特点双足行走机器人具有以下技术特点:1. 多关节结构双足行走机器人与传统的轮式机器人相比,具有更加复杂的多关节结构,可以实现更加灵活的步态和更加复杂的动作。
通过对关节结构和驱动方式的优化设计,提高了机器人的运动性能和动态稳定性。
2. 动力系统双足行走机器人的动力系统包括电动机、液压系统或气动系统,可以实现不同的步态演示和负重运输。
基于ZMP轨迹的双足机器人步态规划及仿真
0 引言仿人双足机器人是通过模仿人体外形、结构和功能而设计的一类仿生机器人,一般具有双臂、双腿、躯干和头部等人体结构特征,能够像人一样进行双手协同作业和双足稳定行走[1]。
与轮式、履带式机器人相比,仿人双足机器人独特的单、双腿交替支撑行走模式具有更大的机动性和更强的环境适应能力,未来有望在军事、服务、科普和娱乐等领域获得广泛应用,具有重大的理论研究意义和实际应用价值。
仿人双足机器人的步态规划是在满足稳定步行条件的前提下,通过规划机器人步行时质心和踝关节的运动轨迹,确定机器人各关节转角随时间的变化函数曲线。
目前,生成双足机器人步态的主要方法可归为三类:1)基于人体运动捕捉数据(HMCD)的步态规划[2];2)基于力学简化模型的步态规划[3-5];3)基于智能算法的步态规划[6-7]。
以上方法中,第一类方法因人体与机器人在结构和形态上存在差异,故人体步行数据不能直接用于机器人的控制,需要经过复杂的修正、变换后才能使用;第三类方法包括人工神经网络(ANN)、中枢模式发生器(CPG)等智能算法[6-7],这类步态生成方法是机器人步态规划的发展趋势,但目前尚缺少严格的数学理论论证,仍不够成熟;而第二类方法是目前最简便、最成熟、应用最广泛的步态规划方法,主要基于二维或三维线性倒立摆、桌子-小车等力学简化模型规划步态[1,3-5]。
利用倒立摆规划双足机器人步态时,因ZMP[8](零力矩点,即地面上合力矩为零的一点)稳定性未被考虑在内,故难以获得稳定裕度较高的步态曲线。
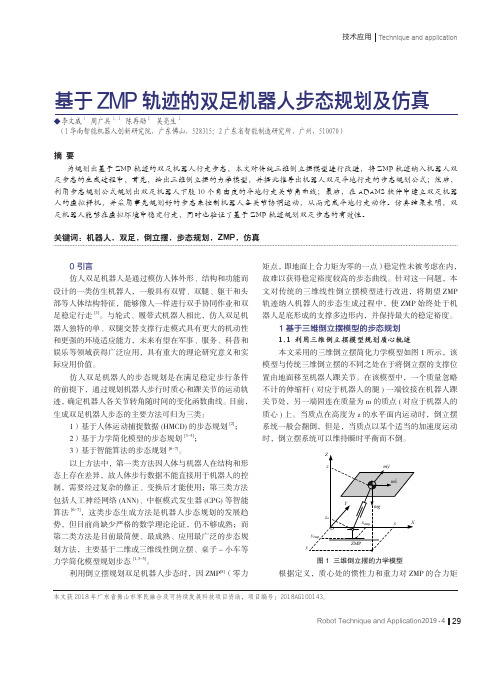
针对这一问题,本文对传统的三维线性倒立摆模型进行改进,将期望ZMP 轨迹纳入机器人的步态生成过程中,使ZMP始终处于机器人足底形成的支撑多边形内,并保持最大的稳定裕度。
1 基于三维倒立摆模型的步态规划1.1 利用三维倒立摆模型规划质心轨迹本文采用的三维倒立摆简化力学模型如图1所示,该模型与传统三维倒立摆的不同之处在于将倒立摆的支撑位置由地面移至机器人踝关节。
双足步行机器人快速步行与仿真(英文)

双足步行机器人快速步行与仿真(英文)
蔚伟;吴伟国
【期刊名称】《系统仿真学报》
【年(卷),期】2009()13
【摘要】结合基于预观控制的ZMP步态生成模式的优点并引入脚尖脚后跟与地面间的旋转关节,以生成双足步行机器人质心和踝关节轨迹,同时提出了侧向质心摆动幅度递减方法以降低快速步行下侧向关节力矩。
通过2km/h双足动步行样本生成实例,利用机械设计与动力分析软件在虚拟物理环境下实现了快速动步行,验证了所提出方法的有效性。
【总页数】5页(P4014-4018)
【作者】蔚伟;吴伟国
【作者单位】哈尔滨工业大学机械设计系
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于Pro/E和ADAMS的双足步行机器人三维造型及仿真
2.基于Pro/E和ADAMS的双足步行机器人造型及仿真研究
3.双足机器人快速直线步行的一种步态规划
4.基于树型数据结构的双足机器人步行三维仿真
5.ADAMS环境下多关节型双足步行机器人步态仿真与结果分析
因版权原因,仅展示原文概要,查看原文内容请购买。
类人猿型机器人“GOROBOT”的可变ZMP双足动步行仿真

类人猿型机器人“GOROBOT”的可变ZMP双足动步行仿
真
吴伟国;郎跃东;梁风
【期刊名称】《系统仿真学报》
【年(卷),期】2007(19)17
【摘 要】为了有效地验证类人猿型机器人"GOROBOT"的双足动步行能力,通过合
理地将可变ZMP(Zero Moment Point)的变化规律定义为余弦曲线,并基于三维倒
立摆的动力学原理,推导出了单脚支撑期内机器人质心轨迹方程。在此基础上,采用
样条插值函数来保证机器人质心加速度的连续性,从而提出了基于这种可变ZMP的
双足动步行关节轨迹生成方法。最后,在虚拟物理环境下利用仿真软件实现了虚拟
的3-D类人猿机器人"GOROBOT"双足动步行,验证了方法的正确性和实际类人猿
机器人"GOROBOT"的双足动步行能力。
【总页数】5页(P4000-4003)
【关键词】类人猿型机器人;可变ZMP;动步行;三维倒立摆
【作 者】吴伟国;郎跃东;梁风
【作者单位】哈尔滨工业大学机电工程学院机械设计系
【正文语种】中 文
【中图分类】TP242.6
【相关文献】
1.类人猿型机器人前向四足步行的研究 [J], 张福海;吴伟国;郎跃东
2.ZMP理论在双足步行机器人步态控制中的应用 [J], 车玲玲;王志良
3.双足机器人预观控制的ZMP补偿步行模式研究 [J], 敬成林;李祖枢;薛方正
4.基于ZMP轨迹的双足机器人步态规划及仿真 [J], 李文威;周广兵;陈再励;吴亮生
因版权原因,仅展示原文概要,查看原文内容请购买
双足机器人行走控制算法的三维仿真研究

文章编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 4 ) 0 3 — 0 3 4 6 — 0 5
计
算
机
仿
真
2 0 1 4 年3 月
双 足 机 器 人行 走 控 制算 法 的 三维 仿 真研 究
敬 成林 . 朱 晓铭
( 贵州财经大学数学与统计 学院 , 贵州 贵 阳 5 5 0 0 2 5 )
ABS TR ACT : T o t e s t w h e t h e r wa l k i n g c o n t r o l a l g o r i t h m o f b i p e d r o b o t h a s o p e r a b i l i t y,a 3 D-s i mu l a t i o n p l a t f o r m wa s
1 引言
机器人三维仿 真 是机 器 人理 论验 证 的一 个 重要 工 具 。 机器 人由于具有多 自由度 , 强耦 合和 高度 非线性 等特 点 , 实
联合 仿真实现的_ 7 ] 。但各软件之 间进 行复杂的数据交换带
来 的误差势必影响仿真对实际系统分 析的可靠性 。其二 , 特
d e s i g n e d t o v e i r f y he t a l g o it r h m.Ac c o r d i n g t o a g e n e lo a g y t r e e - l i k e d a t a s t r u c t u r e w i t h t h e i n n e r r i n g o f t h e l o w e r l i mb s ,a n d t h r o u g h t h e r o b o t k i n e ma t i c s p r i n c i p l e o f c o n n e c t i n g r o d me c h a n i s m ,t h e r o b o t 3 D—s i mu l a t i o n lg a o it r h m wa s d e iv r e d b y ma t ix r t r ns a f o r m me t h o d .Ba s e d o n Ma t l a b s o f t w a r e p r o g r a mmi n g ,t h e 3 D- s i mu l a t i o n i ma g e s o f t h e a l — g o r i t h m we r e i mp l e me n t e d t o a n a l y s e t h e wa l k i n g mo v e me n t .S i mu l a t i o n a n ly a s i s s h o ws t h a t t h e a l g o r i t h m c a n r e li a z e t h e mo v e me n t s o f b i p e d r o b o t ,w h i c h o f f e r s t h e r e l i a b l e d a t a b a s i s f o r t h e s t u d y o f P h y s i c a l r o b o t s . KEYW ORDS: B i p e d r o b o t ; K i n e ma t i c s ; Ma t r i x t r a n s f o r ma t i o n a l g o r i t h m; 3 D s i mu l a t i o n
基于ADAMS的双足机器人建模与仿真
第 27卷 第 5期 文章编号: 1006 - 9348( 2010) 05 - 0162- 04
计算机仿真
2010年 5月
24
2所示的平面二连杆
逆运动学问题。
左 腿髋部的两个关节角可由约束 8 = - 0 和 6 = 4 2 来确定。
对右腿来 说, 在 O 系中髋部 ( C2 点 ) 和踝部 (A 2 点 ) 的坐 标之差为:
xC 2 - xA 2
- L1 sin( 7 - 5 ) - L2 sin 7
yC 2 - yA 2 = ( L1 cos( 7 - 5 ) + L 2 co s 7 ) s in 9 ( 8)
zC 2 - zA 2
( L1 co s( 7 - 5 ) + L2 cos 7 ) cos 9
这个表 达式的 结构和 C 1 点坐标 的结构 类似, 可 以采用
同 样的方法来求出 5、 7和 9。1 和 3 只影响右脚的姿态, 可
以根据行走时 的需要来设定。
3 虚拟样机的建立
根据双 足机器人的 七连杆结 构模型, 在 A DAM S 中建立 双足机器人虚 拟样机模型, 所需参数根 据物理样机 的数据来 进够大。 为了实现虚拟样 机的运动, 要对相 邻连杆间的 各个关节
添加运动副。根据之前 设定的 双足 机器 人的自 由度, 各 关节 处设定的运动副如表 1。
从 P1 ( - XP, - YP ) 开始, 经过 O 点最后到达 P 2 (XP, - YP )。
表 1 虚拟样机的关节约束
双足仿生机器人设计与制作—机械结构设计

双足仿生机器人设计与制作——机械结构设计摘要随着时代的发展,人们的生活节奏越来越快,对工作的效率更是越来越重视,而且如今的科技也在飞速发展中,所以机器人在未来人类生活中发挥着重要的作用,是我们的好帮手,它可以改善我们生活的质量,提高我们的工作效率,从而推动生产力的提高和整个社会的进步。
目前,国内外对仿生机器人的研究重视程度很高,而在仿生机器人研究领域中,双足仿生机器人是一个重要的研究课题,而且我认为它的研究价值要比轮式机器人或其他足式机器人的高。
本设计为结构简单、成本低廉、可操作性高的小型双足仿生机器人,通过仿人的腿部关节和预先设定的目标来进行自由度的分配,根据设计任务来选择驱动元件,进而通过SOLIDWORKS软件进行机械结构的三维造型设计,并且对机器人的关键零件进行有限元分析。
并且根据D-H参数法来建立运动学方程,从而进行正运动学分析。
最后设计出一个可以实现前进后退、左移右移、踏步、鞠躬、超声波避障等功能的小型双足仿生机器人。
关键词:小型双足仿生机器人;机械结构;三维造型;运动学分析;有限元分析Design and manufacture of biped bionic robot -- mechanical structuredesignAbstractAlong with the development of The Times, the pace of life of people more and more fast, working efficiency is more and more attention, and now also in the rapid development of science and technology, so the robot in the future play an important role in human life, is our good helper, it can improve the quality of our life, improve our work efficiency, so as to promote the improvement of productivity and the progress of the society as a whole. At present, the research of bionic robot is highly valued at home and abroad. In the field of bionic robot research, bipedal bionic robot is an important research topic, and I think its research value is higher than that of wheeled robot or other foot robot.This design is a small bipedal bionic robot with simple structure, low cost and high maneuverability. It distributes the degree of freedom by imitating the human leg joints and preset goals, selects the driving elements according to the design task, and then carries out the three-dimensional modeling design of the mechanical structure through SOLIDWORKS software, and carries out the finite element analysis of the key parts of the robot. And according to the D-H parameter method to establish kinematics equations, so as to carry out positive kinematics analysis. Finally, a small bipedal bionic robot is designed, which canrealize forward and backward, left and right, step, bow, ultrasonic obstacle avoidance and other functions.Keywords: Small bionic biped robot; mechanical structure; 3D modeling; kinematics analysis;finite element analysis目录1 绪论 (1)1.1双足仿生机器人的研究意义与目的 (1)1.2国内外对双足仿生机器人研究的现状 (1)2 双足仿生机器人总体方案设计与动力选择 (4)2.1双足仿生机器人的工作原理 (4)2.2结构设计 (4)2.2.1设计目标 (4)2.2.2自由度的分配和计算 (5)2.2.3设计方案分析 (7)2.2.4设计方案的选取 (8)2.3动力源 (8)2.3.1电动机的选择 (9)2.3.2舵机原理 (11)2.3.3舵机选型 (11)2.4总体设计 (12)3 机械结构设计 (12)3.1机器人结构 (12)3.2机器人零件图 (13)3.3机器人装配图 (17)4三维造型设计 (17)4.1关键零件设计与说明 (17)4.1.1机器人的腿部设计 (17)4.1.2机器人的上身设计 (21)4.1.3机器人的手臂设计 (24)4.2机器人的整体三维造型 (25)5运动学分析 (26)5.1正运动学分析 (26)5.1.1 建立机器人的运动学方程 (26)6有限元分析 (29)6.1有限元分析的意义 (29)6.2有限元分析的过程 (29)6.3分析结果 (32)7总结 (33)参考文献 (34)谢辞 ......................................................................................................................... 错误!未定义书签。
仿人双足机器人机构的设计毕业论文
仿人双足机器人机构的设计毕业论文毕业设计中文摘要仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。
仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
本文回顾了国内外仿人双足机器人的发展历史,在分析人类下肢结构的基础上,确定机器人机构的自由度配置、关节结构及驱动形式。
在inventor环境下进行机构的建模及装配,完成仿人双足机器人机构的设计,最后对仿人双足机器人机构进行运动模拟和强度分析,检验机构的运动性能和强度,进一步优化机构的设计。
关键词:仿人双足机器人,机构设计,运动模拟,强度分析毕业设计外文摘要TitleDesignofhumanoidbipedrobotAbstractHumanoidbipedrobotisafrontierfieldofrobotresearch,istheco mbinationofscienceandtechnology,thetechnicallevelonbehalfofa country''s.Characteristicsofhumanoidbipedrobotisthebiggestbip edwalking,soitshighflexibility,canreplacehumandodangerouswor k.Thispaperreviewsthedevelopmenthistoryofdomesticandforei gnhumanoidbipedrobot,basedonanalysisofhumanlowerlimbstructure,determinetherobotDOFconfiguration,jointstructureanddriv emode.Modelingandassemblymechanismbasedoninventor,com pletedthedesignofhumanoidbipedrobotmechanism,finallycarries ontheanalysisofmotionsimulationandstrengthofhumanoidbipedr obot,motionperformanceandthestrengthoftheinspectionorganiz ation,andfurtheroptimizethemechanismdesign.KeywordsHumanoidbipedrobot,mechanismdesign,motionsimulation,strengthanalysis目录1绪论..................................................................................................11.1课题研究的意义...........................................................................11.2国内外仿人双足机器人发展现状................................................21.3本课题研究的主要内容.............................................................112仿人双足机器人机构设计.............................................................122.1人体下肢分析.............................................................................122.2仿人双足机器人总体设计..........................................................202.3仿人双足机器人关节设计..........................................................232.4仿人双足机器人总体结构..........................................................352.5本章小结....................................................................................373机器人机构的运动模拟.................................................................383.1行走的运动模拟.........................................................................383.2蹲下的运动模拟.........................................................................413.3转弯的运动模拟.........................................................................433.4本章小结....................................................................................434机器人机构的强度分析.................................................................454.1静态强度分析.............................................................................454.2运动载荷下的强度分析.............................................................484.3本章小结....................................................................................51结论....................................................................................................52致谢.................................................................错误~未定义书签。