ANSYS转子动力学分析
(必看)ANSYS转子动力学计算讨论
关于ansys做转子动力学问题若干思考(百思论坛)最近想学习一下ansys做转子动力学分析,看了点资料,有点自己感想还有一些别的网友的建议,个人认为比较不错的贴了出来一转子动力学插件:转子动力学插件演示版我已经用了基本上图形可以出来,由于版本原因例程和实际的对应有点问题,如果要有时间我可以把我做的过程,贴出来.难点:坎贝尔图我有些不太了解1 2 5 10频率还有一些刚度考虑的随转速在变化,有函数关系例子上提到了用matrix27模拟刚度,而它只用了刚度阻尼单元,好像没有考虑刚度x y 的交叉项,另外因为是演示版,节点有所限制总的来说不错!将来的要做的工作:滑动轴承模拟滚动轴承模拟挤压油膜阻尼器密封转定件接触(碰摩)电磁场耦合自润滑轴承(石墨)有感:各位学习ansys的高手,有没有兴趣自己开发上面单元,这是很有用的工作,我很感兴趣,但有碍于自己知识水平有限,尤其理论水平,有心无力,如果有对此感兴趣的希望一起研究研究;另外对于ansys做转子的动力学的书籍市场上几乎没有,呵呵希望能组织一些人力把这本书完成功在当代利在千秋提示:1 根据本人自己瞎琢磨,以及看论坛的各位高手的留言觉得做模态分析临界转速计算一般用实体单元的少由于不能考虑陀螺力矩shaft:可以采用beam系列模拟pipe系列也行这些能考虑陀螺力矩叶轮叶片:采用mass21模拟,计算转动惯量,质量通过实常数设置刚度阻尼陀螺质量矩阵:都可以采用matrix27模拟,当然也有用弹簧阻尼单元做的, 问题有过考虑油膜的非线性怎么模拟?2. 网友1:目前轴承计算,采用将刚度和阻尼的8个系数,以施加力和力矩的方式解决> 这个我没搞懂,如果那位给个例子3Q网友2: Pip16能考虑陀螺力矩的影响,实体单元没有角自由度因此不能考虑陀螺力矩的影响,如果你的转子没有类似大圆盘的部分或者大的转动部分在轴的接近轴向中心,或者转速不高,就不用考虑陀螺力矩的影响,可以先采用pipe16做一下看随着转速提高,陀螺力矩对固有频率的影响.网友3:可用于陀螺矩阵下列单元可用: Mass21\beam4\pipe16\beam188\beam189上面三个网友的解释,转自:simwe3 实体单元solid45我用过计算临界转速,其他的甚么都对称,计算出来的水平和竖直方向的固有频率差很多,不知道甚么原因,和用pipe16模拟的差很多,我觉得约束形式对临界转速影响很大,对于实体单元来说模拟轴承本身就不容易,所以个人倾向于用pipe16模拟轴,计算精度也不差,我做过实验一阶临界转速和实际转子系统几乎不差多少,二阶由于实验很难观察到所以这个没有对比,但是可以采用捶击法测出转子的各阶固有频率进行对比,这个我也大概试过,二阶还是差点!在simwe上的一篇文章计算转子的临界转速!!!! 计算临界转速/PREP7MP,EX,1,2.1e11MP,NUXY,1,0.3Mp,DENS,1,7850ET,1,COMBIN14ET,2,SOLID45R,1,0.1, , ,*afun,deg ! 设置角度为(度默认为弧度)r1=0.025/2r2=0.240/2l=0.025CYL4,0,0,0,0,r1,20VEXT,all, , ,0,0,l,,,,CSYS,1VGEN,18,all, , , ,20, , ,0CSYS,0VGEN,25,all, , , , ,l, ,0ASEL,NONECYL4,0,0,r1,0,r2,20VEXT,all, , ,0,0,l,,,,CSYS,1VGEN,18,all, , , ,20, , ,0VSEL,S,LOC,X,r1,r2VGEN, ,all, , , , ,10*l, , ,1ALLSEL,ALLNUMMRG,ALL, , , ,LOWNUMCMP,ALLLSEL,S,LOC,X,0,r1LSEL,A,LOC,X,r2LESIZE,all, , ,1, , , , ,0LSEL,INVELESIZE,all,l, , , , , , ,0MSHAPE,0,3DMSHKEY,1VSEL, , , ,allVSWEEP,allCM,rotor,VOLUCM,Erotor,ELEMsaveVSEL,S,LOC,Z,10*l,11*l!*/GODK,P51X, , , ,0,ALL, , , , , ,OMEGA,0,0,0,1CMOMEGA,EROTOR,100,0,0,,,, , , ,0另外希望大家推荐几个不错的论坛,我现在偶尔上上simwe,最近在刚结构注册了一个帐号好像7天以后才可以发言,现在还在等.大家要是看到有ansys做转子方面的文章论坛还有不错的帖子,希望大家跟贴我想学习一下呵呵谢谢大家!ansys10.0已将考虑了陀螺力矩,加上了这部分功能,可惜我为了装转子动力学插件,现在版本改回了8.1,希望用过10.0这个功能的可以讨论一下,那里不明白,那里懂了!如果有对这方面感兴趣的网友,看看这个帖子相当不错/vi ... 2407&highlight=simwe上的一个帖子【讨论】做转子动力学时:如何获得转子临界转速。
ANSYS转子动力学分析

(仅仅适用于线单元) Z
rotation axis: x
B
Y
A
Ф
Whirl Orbit Plots
Print orbit: PRORB
PRINT ORBITS FROM NODAL SOLUTION *****ANSYS VERIFICATION RUN ONLY***** DO NOT USE RESULTS FOR PRODUCTION
多级转子 Campbell图
Campbell Diagram …
y
ω
Elliptical whirl orbit
As frequencies split with increasing spin velocity, ANSYS identifies:
• forward (FW) and backward (BW) whirl • stable / unstable operation • critical speeds (PRCAMP)
OMEGA/CMOMGA Command
• OMEGA: 该命令指定结构在总体迪卡儿系下的转速(角速度)
转动速度可以在下列分析类型中定义:
• Static • Harmonic - Full or mode superposition • Transient - Full or mode superposition
STATIC, MODAL, HARMONIC, TRANSIENT
转子动力学求解
对比项
Stationary Frame
Rotating Frame
单元类型
BEAM4, PIPE16, MASS21, SOLID45, SOLID95, SOLID185, SOLID186, BEAM188, BEAM189.
ansys 转子动力学 不平衡质量
ansys 转子动力学不平衡质量ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具。
不平衡质量是指在旋转机械系统中存在的质量分布不均匀的情况,它会导致系统产生不平衡力和振动。
不平衡质量在旋转机械系统中的影响是非常重要的,它会引起系统的振动、噪声和磨损,甚至会导致系统的故障和损坏。
因此,对不平衡质量进行准确的分析和评估是非常重要的。
ANSYS转子动力学可以通过以下步骤进行不平衡质量的分析:1. 建立转子模型:首先,需要根据实际情况建立旋转机械系统的几何模型。
这个模型可以包括转子、轴承、轴承座、连接件等各个组成部分。
2. 定义转子材料和属性:根据实际情况,需要定义转子的材料属性,例如弹性模量、密度等。
3. 定义转子的运动:需要定义转子的旋转速度和方向。
这个可以根据实际情况设置,例如转子的转速和转向。
4. 定义不平衡质量:需要定义转子上的不平衡质量分布。
这个可以根据实际情况设置,例如在转子上添加一定的质量块或者质量分布。
5. 进行转子动力学分析:使用ANSYS转子动力学工具进行分析。
工具会根据转子的几何模型、材料属性、运动和不平衡质量分布等信息,计算出转子的振动响应和不平衡力。
可以通过分析结果来评估不平衡质量对系统的影响。
6. 优化设计:根据分析结果,可以对转子的设计进行优化。
例如调整不平衡质量的位置和大小,以减小不平衡力和振动。
总之,ANSYS转子动力学是一种用于分析旋转机械系统中不平衡质量的工具,通过建立转子模型、定义转子的运动和不平衡质量分布等信息,可以计算出转子的振动响应和不平衡力,并进行优化设计。
基于ANSYS的磁悬浮轴承转子系统的动力学特性研究

产品设计与应用基于ANS YS的磁悬浮轴承转子系统的动力学特性研究万金贵1,汪希平2,高琪1,张飞1(1.上海第二工业大学实验实训中心,上海201209;2.上海大学机电工程与自动化学院,上海200072)摘要:针对一个实际应用的磁悬浮支承柔性转子系统,进行多组参数条件下的有限元模态分析,分别得到系统的前8阶临界转速与模态振型。
将有限元计算结果与试验结果进行对比分析,验证了有限元分析的正确性。
通过对该磁悬浮转子系统的有限元分析表明:/轴承主导型0的低阶临界转速及振动模态是由轴承控制器各控制通道决定的;而/转子主导型0的高阶临界转速及振动模态符合传统的轴承转子系统动力学特性普遍规律。
关键词:转子系统;磁悬浮轴承;ANSYS;动力学特性;临界转速;模态振型中图分类号:T H133.3;O241.82文献标志码:A文章编号:1000-3762(2010)06-0001-05 R esearch on Dyna m ic Character istics of R otor Syste m Suppor tedby AM B B ased on ANS YS M oda l Ana lysisWAN Ji n-gui1,WANG X i-p i n g2,G AO Q i1,Z HANG Fe i1(1.P racti ca l Center,Shangha i Second P olytechn i c University,Shanghai201209,China;2.School ofM echatron i cs Engi neer i ng and Auto m atio n,Shangha iUn i versity,Shangha i200072,Ch i na)Abstr ac t:The fi n ite e l em ent m o da l analysis of the practical flex i ble rotor system supported by A MB is ca rried out ac2 cordi ng to diff e rent gro ups of para m eters.The first8-order cr iti ca l speeds and m ode shapes are sol ved respecti ve ly.The correctness of t he calculati on resu lts is tested and ver ifi ed by t he exper i m ents.The calculati on resu lts are d iscussed and t he dyna m ic characteristi cs of t he rotor syste m supported byA M B are su mmed up.That i s,the"bear i ng-do m i na2 ted"lo w-order critical speeds and vi brati on m odes are dec i ded by the A MB control channe,l and the"rot or-do m i na2 ted"hi gh-order cr iti ca l speeds and vibratio n m odes a re i n li ne with t he universa l la w of dy na m ics character i sti cs of t he conventi ona l beari ng rotor syste m.K ey word s:rotor syste m;ac ti ve m agne ti c beari ng;ANS YS;dy na m ic character i stics;critica l speed;m o de shape主动磁悬浮轴承(acti v e magnetic bearing, A MB)是利用电磁铁产生可控电磁力将转子悬浮支承的一种新型轴承,由于具有一系列独特的优点而引起人们的广泛关注[1]。
ANSYS转子动力学问题的处理

ANSYS转子动力学问题的处理除了在像Civic和Accord车型上获得了长久的商业成功之外,Honda还因其实现了很高的舒适性、安全性和性能标准的承诺而受到称赞。
在影响车辆的舒适性的因素里面,控制路面噪声是最重要的。
在Honda最近已开发的几种车辆里面,其发动机公司成功地通过利用一种新的混合模拟方法减少了路面噪声。
同LMS工程咨询部门一起,Honda实施了混合模拟过程,能够快速和精确地模拟一直到300Hz路面噪声。
这种方法由连接一个基于试验的内饰车身模型和一个悬架系统的有限元模型而组成。
获得的整车混合模型使Honda能够在开发阶段的更早期评价更多的悬架设计选择,并针对改善的路面噪声性能提出更有效的对策。
传统方法的局限性无论是在进行一个热烈的讨论,还是在安静的行使过程中享受一支轻音乐,一个安静内部的舒适性将会使氛围有很大的区别。
一个潜在的干扰因素就是路面噪声,它能通过车辆的机械结构和连接进行传播。
在众多的传播路径中,悬架装配零件起着重要的作用,因此很难控制和减少路面噪声。
先于物理样机修改阶段之前,进行路面噪声级别的预测一直是个有难度的挑战。
在早期的悬架设计中最常用的方法是依赖于根据已有经验的粗略判断,例如,悬架连接的共振频率应高于一个给定频率或是悬架刚度应在一个特定的范围。
这种方法的主要问题是,没有办法依据这些规则说明一个设计修改将会增加或减少路面噪声。
开发整个有内饰车身和所有悬架部件的有限元模型是评价路面噪声性能的另外一种方法。
使用纯粹的基于有限元的全内饰车辆模型的一个缺点就是,建模非常棘手。
当焦点仅仅局限在车辆悬架上时,在车身建模上投入太多是不必要的。
使用纯粹的有限元模型进行模拟的另外一个缺点就是高频预测的精度会降低。
混合的Test-CAE方法增加了速度和精度为了评价混合建模和模拟方法的精度和可用性,这种混合方法已经用于一个现有的Honda车型。
LMS工程服务部门从创建一个基于有限元的单个悬架系统部件模型开始,包括悬架连杆、减振器、副车架等等。
基于ANSYS的电机转子的动力学分析

现代工业上旋转机械单机容量在不断增大,而转子直径不可能随其容量的增大而按比例增大。
高转速轻结构是近代高速旋转机械的发展和设计趋势。
本文使用ansys研究了电机转子动力学问题,得出ansys可以计算转子动力学问题。
1 引言转子动力学的研究,最早可追溯到十九世纪六十年代。
一个多世纪以来,随着大工业的发展,转子系统被广泛地应用于包括燃气轮机、航空发动机、工业压缩机等机械装置中,在电力、航空、机械、化工、纺织等领域中起着非常重要的作用。
因而,转子动力学有着极强的工程应用背景,其相关的研究工作也越来越受到人们的重视。
由于材质的不均匀,制造、加工及安装误差等,转子系统不可避免的存在着质量偏心,同时转子在工作过程中还可能产生热变形以及磨损和介质的姑附等现象,这些因素或多或少都会导致转子不平衡的增大从而使转子的不平衡振动增大。
由过大的不平衡量引起的转子系统的振动是十分有害的,它使机械的效率降低、载荷增加,使一些零部件易于磨损、疲劳而缩短寿命,较大的振动还会恶化操作人员的劳动环境,甚至会导致发生机毁人亡的严重事故。
消除或者减小转子系统的振动首先考虑是对转子进行平衡。
现代工业上旋转机械单机容量在不断增大,而转子直径不可能随其容量的增大而按比例增大。
高转速轻结构是近代高速旋转机械的发展和设计趋势。
转子设计和发展的这种趋势对转子的质量不平衡提出了严格的限制。
这种情况下,转子的动力学变得更加突出和重要。
本文使用ansys研究了某电机转子的动力学问题,为转子动力学设计找到了一个新的途径。
2 模型的建立及计算如图1所示,为电子转子的有限元模型,使用BEAM188单元模拟转子的轴,使用MASS21单元模拟转子,使用单元COMBI214模拟轴承。
图1 电机转子的有限元模型(不显示单元)图2 电机转子的有限元模型(显示单元)图3给出了Beam188 单元的几何简图。
Beam188单元适合于分析从细长到中等粗短的梁结构,该单元基于铁木辛哥梁结构理论,并考虑了剪切变形的影响。
转子动力学基础-ANSYS-APDL和ANSYS-Workbench对比
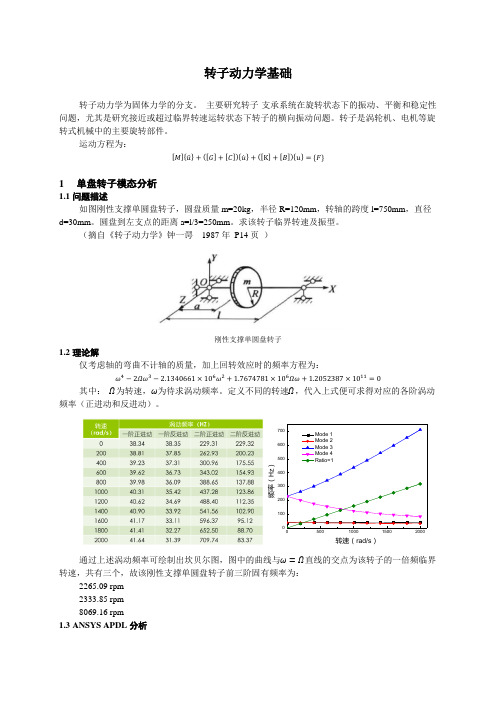
图6中A代表椭圆的长轴、B代表椭圆的短轴,圆盘1的轴心轨迹是半径为0.797e-4m的圆,圆盘2的轴心轨迹是轨迹为半径0.308e-4m的圆,与理论解一致。
3
3.1
如图所示的电机含有两个转子:内转子和外转子。
内转子是一根实心轴,较长;它的两端通过轴承与机架相连;在两端距离轴承不远的地方装有两个圆盘(图中没有绘制,在有限元分析中圆盘会用质量单元表示),而且右边的圆盘上存在不平衡质量,该不平衡质量产生了不平衡的力(f0= 70e-6kg·m)。
(1)7号节点(内转子上)和12号节点(外转子上)的幅值与频率的关系图。也就是要绘制这两个点的幅频关系曲线。
(2)在某一个给定频率处的转轴轨迹图。
(3)在某一个给定频率处转轴的涡动动画。
注:例子来自ANSYS help中转子动力学——8.7. Example Unbalance Harmonic Analysis。
这是一个有关 的8次代数方程,对于给定的 ,可解出4个正向涡动角速度和4个反向涡动角速度。
绘制涡动角速度随自转角速度变化曲线可得坎贝尔图,令 分别等于± 代入频率方程,即可分别解出在同步正涡动和同步反涡动下的临界转速。
表1临界转速
所谓转子的临界转速通常是指同步正向涡动时的临界转速。对于本算例的两圆盘转子系统,临界转速只有两个,即1158r/min和3183r/min。
在后处理中采用PLVAR命令输出圆盘1和圆盘2节点的总位移变化曲线。
圆盘节点位移随激励频率变化关系
从图2可以看出,曲线在19.2Hz和52.7Hz出现峰值,该两个峰值频率对应同步正进动(涡动)临界转速1152rpm和3162rpm,与模态分析结果相对应。
当频率为19.2Hz时,采用PLORB命令得到转子系统的轴心轨迹图如下。
ANSYS双转子电机的转子谐响应分析[转]
![ANSYS双转子电机的转子谐响应分析[转]](https://img.taocdn.com/s3/m/1603101203020740be1e650e52ea551810a6c965.png)
ANSYS双转⼦电机的转⼦谐响应分析[转]/s/blog_9e19c10b0102vd5y.html【问题描述】⼀个双转⼦电机如图所⽰该电机含有两个转⼦:内转⼦和外转⼦。
内转⼦是⼀根实⼼轴,较长;它的两端通过轴承与机架相连;在两端距离轴承不远的地⽅装有两个圆盘(图中没有绘制,在有限元分析中圆盘会⽤质量单元表⽰),⽽且右边的圆盘上存在不平衡质量,该不平衡质量产⽣了不平衡的⼒。
外转⼦是⼀根空⼼轴,它套在内转⼦外⾯。
外转⼦的左端与机架通过轴承相连,右端⾯通过轴承与内转⼦连接(图中没有表⽰出来)。
在外转⼦上也有两个圆盘,这两个圆盘不存在偏⼼质量的问题。
内转⼦的转速是14000转每分,⽽外转⼦的转速是21000转每分。
所有的相关⼏何尺⼨,轴承的参数,以及圆盘的质量和惯性量,在下⾯建模的时候给出。
现在要对该双转⼦电机进⾏转⼦动⼒学仿真,具体是做谐响应分析,⽬的是考察:(1)7号节点(内转⼦上)和12号节点(外转⼦上)的幅值与频率的关系图。
也就是要绘制这两个点的幅频关系曲线。
(2)在某⼀个给定频率处的转轴轨迹图。
(3)在某⼀个给定频率处转轴的涡动动画。
《注》该算例来⾃于ANSYS APDL转⼦动⼒学部分的帮助实例。
【范例说明】给出本例⼦的⽬的,是想说明:(1)如何⽤ANSYS经典界⾯做转⼦的谐响应分析。
(2)如何对转⼦系统中的轴承建模。
(3)如何建模不平衡质量。
【问题分析】1. 对于内转⼦⽤梁单元BEAM188建模,对于外转⼦也⽤BEAM188建模。
由于这⾥涉及到圆盘的位置,集中质量的位置,准备⽤直接建模法。
这就是说,先创建节点,然后由节点创建单元。
2. 对于4个轴承,使⽤COMBI214建模,该单元是⼆维的弹簧/阻尼单元,⽀持在两个⽅向上定义刚度和阻尼特性。
3.对于4个圆盘,使⽤MASS21建模。
质点单元创建在相应的转轴上,设置其质量和转动惯量。
4.由于内外转⼦的转速不同,需要分别定义两个组件,并对每个组件给以不同的转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 在谐响应分析中,可以定义不平衡激励力 (F = Ω2 * Unb)作用在 某个节点上。
不平衡响应 …
Load vector
[M
]⎨⎧
⎩
&u& &u&
y z
⎫ ⎬ ⎭
+
[C
]⎨⎧
⎩
u& u&
y z
⎫ ⎬
[K
⎭
]⎨⎧
⎩
u u
y z
⎫ ⎬ ⎭
=
⎧ ⎨ ⎩Fy FzFra bibliotek⎡ ⎢
0
−ωz
ωy
⎤ ⎥
ω = ⎢⎢⎣⎢−ωωzy
0 ωx
−
ωx
⎥ ⎥
0 ⎥⎦
转子动力学分析的基本方程
Dynamic equation in stationary reference frame
M{&u&}+( C +[Cgyr]){u&}+ K{u}= F ⎡ ⎤
⎢⎥ ⎢⎥ ⎢⎣ ⎥⎦
⎡⎤ ⎢⎥ ⎢⎥ ⎢⎣ ⎥⎦
omega1 = 0.
KYY1 = 1.e+4
KZZ1 = 1.e+7
omega2 = 250.
KYY2 = 1.e+5 KZZ2 = 1.e+7
Tabular input for
omega3 = 500. KYY3 = 1.e+6
REAL constant
KZZ3= 1.e+7
/com, Tabular data definition
UZ
A
0.0000
0.0000
0.0000
0.0000
-0.7192E-12 0.3823
-0.1132E-11 0.7071
-0.1059E-11 0.9230
B 0.0000 0.0000 0.3823 0.7071 0.9230
PSI 0.0000 0.0000 0.0000 0.0000 0.0000
LOAD STEP= 1 SUBSTEP= 4 RFRQ= 0.0000 IFRQ= 2.5606 SHAPE AT T=0, ORBIT
LOAD CASE= 0
NODE UX 1 0.0000 2 0.0000 3 0.0000 4 0.0000 5 0.0000
UY 0.0000 0.0000 0.3823 0.7071 0.9230
⎡⎤ ⎢⎥ ⎢⎥ ⎢⎣ ⎥⎦
⎧⎫ ⎪⎪ ⎨⎬ ⎪⎩ ⎪⎭
Gyroscopic moment {fg}=[Cgyro]{u& }
目录
• 转子动力学的理论背景 • 转子动力学分析的基本内容 • 转子动力学分析的求解 • 应用实例 • 总结
转子动力学分析的内容和应用
• 转子动力学分析包括
– 无阻尼临界转速计算 – 不平衡响应分析 – 有阻尼特征值计算 – 稳定性分析
KZZ(1,1) = KZZ1 , KZZ2 , KZZ3
et, 3, 214
keyopt, 3, 2, 1
! YZ plane
r,1, %KYY%, %KZZ%
不平衡响应
转速 ω引起的可能的激励是:
• 不平衡 (ω) • 不对中 (2* ω) • 叶片, 风扇, 喷嘴, 扩散等的影响 (s* ω) • 象离心式压缩机的气动激励 (0.5* ω) • 某些力可能需要考虑结构的同步或者不同步
目录
• 转子动力学的理论背景 • 转子动力学分析的基本内容 • 转子动力学分析的求解 • 应用实例 • 总结
转子动力学的求解
Stationary Frame
•基本的转子动力学 •需要轴对称结构 •允许多级旋转比率和静止的组件 •边界条件和计算结果在静止坐标系 •能够生成Campbell图 •适用的分析类型:
M{&u&r}+ ⎡ ⎤
⎢⎥ ⎢⎥ ⎢⎣ ⎥⎦
( C⎡ ⎤ ⎢⎥ ⎢⎥ ⎢⎣ ⎥⎦
+[Ccor
]){u& r}+
( K⎡ ⎢ ⎢ ⎢⎣
⎤ ⎥ ⎥ ⎥⎦
−[Kspin
]){ur}=
F⎧ ⎫
⎪⎪ ⎨⎬ ⎪⎩ ⎪⎭
Coriolis force {fc}=[Ccorio]{u& r}
Coriolis matrix [Ccor]= 2 ∫ ρΦT ωΦ dv,
分析类型
Modal, Transient, Harmonic
Static, Modal, Transient,
Harmonic
功能和常用命令
• Omega command – (OMEGA, CMOMEGA) • Coriolis command – (CORIOLIS) • Campbell diagram - (PLCAMPB, PRCAMPB, CAMPB) • Backward / forward whirl & instability • Multi-spool rotors • Whirl orbit plots – (PLORB, PRORB) • Bearing element – (COMBIN214) • Unbalance response (SYNCHRO)
MODAL, HARMONIC and TRANSIENT
Rotating Frame
•基本的柔性体动力学 •不必是轴对称结构 (或者循环对称结构) •单一的转速比 •边界条件和计算结果在旋转坐标系 •使用的分析类型:
STATIC, MODAL, HARMONIC, TRANSIENT
转子动力学求解
⎫ ⎬ ⎭
Spin ω about X - axis
Load vector
Synchronous (s = 1): Unbalance force Fy = F0 ω 2cos(ωt+α)
F0 = m*r
(mass*distance to axis) Fz = F0 ω 2sin(ωt +α)
Asynchronous: External force F1
*DIM,KYY,table,3,1,1,omegs
KYY(1,0) = omega1 , omega2 , omega3
KYY(1,1) = KYY1 , KYY2 , KYY3
*DIM,KZZ,table,3,1,1,omegs
KZZ(1,0) = omega1 , omega2 , omega3
Plot orbit: PLORB
orbit characteristics
轴承单元 (COMBIN214)
– 2D spring/damper with cross-coupling terms – 通过实常数来指定刚度和阻尼系数 – 实常数可以是随速度变化的表格
⎡C fxx ⎢⎣C fyx
C fxy C fyy
OMEGA/CMOMGA Command
• OMEGA: 该命令指定结构在总体迪卡儿系下的转速(角速度)
转动速度可以在下列分析类型中定义:
• Static • Harmonic - Full or mode superposition • Transient - Full or mode superposition
⎤⎧u& ⎥⎦⎨⎩u&
x y
⎫ ⎬ ⎭
+
⎡K ⎢⎣K
fxx fyx
K fxy K fyy
⎤ ⎥ ⎦
⎧u ⎨⎩u
x y
⎫ ⎬ ⎭
=
⎨⎧⎩FFxy
⎫ ⎬ ⎭
( ) Cf = Cf ω
( ) K f = K f ω
轴承单元 (COMBIN214)
k = k (ω) c = c (ω)
! Example of table parameters input
• • 在下列分析类型中施加Coriolis 效应:
– Static -(在静止坐标系下不用) – Modal –也支持预应力模态分析 – Harmonic -Full or QRDAMP-支持基于模态叠加法 – Transient - Full or mode QRDAMP-支持模态叠加法
• CORIOLIS, Option, --, --, RefFrame – Option (Activate/Deactivate) – RefFrame (Rotating/Stationary)
ANSYS转子动力学分析
安世亚太西区客户支持部
2008-10-14
目录
• 转子动力学的理论背景 • 转子动力学分析的基本内容 • 转子动力学分析的求解 • 应用实例 • 总结
转子动力学理论背景
δ
y
z
x
bearing
shaft
ω
bearing
rotor
转子动力学理论背景
在非零转速下的Coriolis和不平衡项
Campbell Diagram
• 对应不同的角速度,在模态分析中采用多载荷步对应 不同的角速度 ω, Campbell 图表现出固有频率随转动 频率的变化。
• 命令: PLCAMP, PRCAMP, CAMPB
– PLCAMP: 绘制 Campbell diagram – PRCAMP: 输出频率和临界转速 – CAMPB: 支持预应力结构的Campbell图计算
• CMOMEGA: 指定某些部件关于任意定义的转动轴的转动速度 • OMEGAX, OMEGAY, and OMEGAZ
– CMOMEGA适用下列分析类型s: • Static • Harmonic - Full • Transient - Full