无刷电机控制程序 中断部分
无刷电机控制器原理图
无刷电机控制器原理图无刷电机控制器是一种用于控制无刷直流电机的电子设备,它通过控制电机的电流和电压,实现对电机的精准控制。
在本文中,我们将介绍无刷电机控制器的原理图,以帮助大家更好地理解其工作原理。
首先,我们来看一下无刷电机控制器的基本组成部分。
无刷电机控制器通常由电源模块、驱动模块、控制模块和保护模块组成。
电源模块负责提供电机所需的电源,驱动模块负责控制电机的转速和方向,控制模块则用于接收外部控制信号,并将其转换为电机控制指令,保护模块则用于监测电机的工作状态,并在出现异常时进行保护。
接下来,我们来详细介绍无刷电机控制器的原理图。
在原理图中,我们可以看到各个模块之间的连接关系和信号传输路径。
电源模块通常由电源输入端、电源滤波器、电源管理芯片和电源输出端组成,其中电源管理芯片负责对输入电源进行稳压和滤波处理,以保证电机工作时的稳定电源供应。
驱动模块则包括电机驱动芯片、功率放大器和电机输出端,电机驱动芯片负责接收控制模块发送的电机控制指令,并将其转换为驱动电机的电流和电压信号,功率放大器则负责放大信号并驱动电机正常工作。
控制模块通常由微控制器或数字信号处理器组成,它负责接收外部控制信号,并将其转换为电机控制指令,然后发送给驱动模块。
同时,控制模块还可以接收来自电机的反馈信号,并进行闭环控制,以实现对电机的精准控制。
最后,保护模块则包括过流保护、过压保护、过温保护等功能模块,它们负责监测电机的工作状态,并在出现异常时及时进行保护,以避免电机损坏。
总的来说,无刷电机控制器的原理图是一个复杂的电子系统,它通过各个模块之间的协同工作,实现对无刷电机的精准控制和保护。
希望通过本文的介绍,大家对无刷电机控制器的工作原理有了更深入的了解。
无刷直流电动机驱动控制器设计
(isd)的分量 。 6)利用解 耦 ,计算 定子输 出 电压 空间 矢
量 。
状态图 。
5 总 结
基 于MC56F8O13 DSC 的无刷 直流 电机 ,
矢 量 控 制 技 术 通 常 用 于 磁 场 定 向 控 制
7) 利用 反 向Park转 换 ,将 定 子 电压 空 调速 控制器结 构简单 ,调速控 制结构简单 ,性
82 家电科技
Technology
技 术
、>( r
Ix 、 厂
= ==
区
r7
重载 中断服 务程 序每 两个PWM重载 周期执 行 一 次 ,PWM重 载周 期为 125 u S。用于 快速 电
流 控 制 回路 。ADC扫 描 中断服 务程 序在 一 个
3-P ri n ce
4 2应用程序状态 图
图2矢量控制转 换
应 用 程 序 状 态 图 由 四 个 主 要 的 状 态
(A RP IN IT , A RP STO P, ARP RUN# ̄
—
—
—
ARP FAULT)和五 个子状态 组成 ,这些子 状 —
态 只能 由ARP RUN主 状 态调 用 。 复位 后 , —
1)测量 电机参量 (相电压和 电流 )。
设 计 。
2)根 据Clarke转 换 ,将 它 们传入 二 相系
4.1应用程序流程图
统 (a, B)。
如 图3所示 ,应 用软件 是 由实时 的中断 驱
3)计 算转子 磁通 空间矢 量幅度 和位 置偏 动运行 。有三个周期 性中断服务例 程 ,执行 主
各 自的潜 力得到充分 的发挥 ,因此无刷 直流 电
foc 直流无刷控制例程

foc 直流无刷控制例程英文回答:## Field-Oriented Control (FOC) for Brushless DC Motor.Introduction.Field-Oriented Control (FOC) is a high-performance control method for brushless DC (BLDC) motors. It is based on the principle of representing the motor's magnetic field as two orthogonal components: the d-axis and q-axis. By controlling these components independently, FOC can achieve precise control of the motor's speed and torque.Benefits of FOC.Compared to traditional control methods, FOC offers several advantages:Improved efficiency.Higher torque and speed capability.Reduced torque ripple.Enhanced dynamic response.Implementation.The implementation of FOC involves the following steps:1. Current sensing: Measure the motor's phase currents using Hall sensors or other methods.2. Clark and Park transformations: Convert the phase currents into the d-q reference frame.3. PI controllers: Implement PI controllers to regulate the dand q-axis currents.4. Inverse Park transformation: Convert the controlled d-q currents back to the phase currents.5. PWM generation: Generate the PWM signals to drive the motor's power transistors.Example Code.Here is an example FOC code for a BLDC motor in C++:cpp.#include <Arduino.h>。
永磁无刷直流电机调速控制系统的设计研究
Internal Combustion Engine &Parts0引言随着人类工业社会的迅速发展,能源危机是21世纪各个国家所面临的重大危机,也是要实现可持续发展所必须解决的难题。
永磁无刷直流电机的发展历史可以追溯到上世纪四十年代,直到八十年代初期,在钕铁硼稀土这一永磁材料的突破性研究取得了巨大成果,并且加上生产力迅速提升,制造投入减小的影响,永磁无刷直流电机行业迎来了蓬勃发展。
近三十年来,随着科学研究的深入,永磁体性能得到了跃进式的提升,相应的电力电子器件的完善和蓬勃发展也促进了这一行业的迅猛发展。
永磁无刷直流电机控制系统研究方向与现代电力电子技术、现代控制理论、电机集成技术和微机技术等学科密切相关,相辅相成。
科学家们通过对其研究背景、研究意义、结构组成、工作原理、数学模型、硬件电路设计、软件设计等方面的深入研究,使得永磁无刷直流电机在拥有良好调速性能的情况下,机械换向和电刷等历史研究中出现的难点获得了解决,目前永磁无刷直流电机的用途遍布各行各业,小到家用电器,大到航空航天,都有永磁无刷直流电机的身影,发展前景不可估量。
1研究背景与意义从上世纪四十年代至今,永磁无刷直流电机的发展在实际应用上与永磁材料的突破性研究,生产力迅速提升,制造投入减小,电力电子器件的迅猛发展息息相关,在理论研究上与现代电力电子技术、现代控制理论、电机集成技术和微机技术等学科的深入研究息息相关。
由于其所具有的大功率、大转矩、高速度、高性能、微型化和数字化等特点决定了该行业宽广的发展前景,也吸引了不少科研工作者的目光。
目前永磁无刷直流电机在各行各业都得到广泛的应用,小到家用电器,大到航空航天,都有永磁无刷直流电机的身影。
基于上述原因,对永磁无刷直流电机的控制系统进行合理的、科学的、系统的研究探索是非常重要且必要的,这是现代工业发展和机电一体化所提出来的必须进行的挑战,这一研究具有深远的理论意义和实际应用价值,并且会给整个社会和相关行业带来巨大的经济效益。
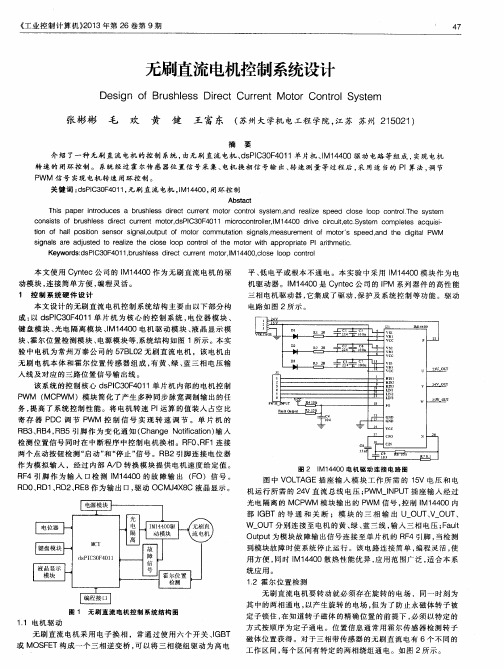
无刷直流电机控制系统设计
s i g n a l s a r e a d j u s t e d t o r e a l i z e t h e c l o s e l o o p c o n t r o l f o t h e mo t o r w i t h a p p r o p r i a t e P I a r i t h m e t i c .
P WM 信 号 实现 电机 转 速 闭环 控 制 。 关键词 : d s P I C3 O F 4 0 1 1 , 无刷 直 流 电机 , I M1 4 4 0 0, 闭环 控 制
Ab s t ac t T hi s p ape r i n t r o duc e s a br u sh t es s di r ec t c ur r e n t mo t or c on t r o l s y s t em , a n d r ea l i l Th e s y s t em
co ns i s t s o f br u s hl es s di r ec t cu r r en t mo t o r , ds PI C3 0F 4 01 1 m i cr oc on t r o l l er , I M1 4 40 0 dr i v e ci r c ui t 。 et c S y s t e m c om p l e t e s a c qui s i 。 t i on o f h al l p os i t i on s e ns or si gn al , ou t pu t o f mot or c o mmu t a t i o n s i gn a l s , me a su r emen t o f mot or S s pee da nd t h e di gi t al P W M
无刷直流电机调速--C语言源程序

无刷直流电机调速--C语言源程序附录1. C语言源程序:#include"stdio.h"#include"myapp.h"#include"ICETEK-VC5502-EDU.h"#include"scancode.h"#include"lcd.h"#define CTRSTATUS (*(unsigned int * )0x608000) //port8000 #define CTRLED (*(unsigned int * )0x608004) //port8004#define MCTRKEY (*(unsigned int * )0x608005) //port8005 #define CTRCLKEY (*(unsigned int * )0x608006) //port8006 #define CTRMOTORBSPEED (*(unsigned int * )0x608003)void InitMcBSP();void INTR_init( void );void InitForMotorB( void );void showparameters();void LCDPutString(unsigned int * pData,int x,int y,unsigned int nCharNumber,unsigned color);void PIDControl(int rk,int yk);void PrintParameters();//定时器分频参数#define T100 99 // 100个时钟周期中断一次#define T2Hz 20000 // 20000个时钟周期读取速度一次//工作变量usigned int uWork,uN,nCount,nCount1,nCount2,nCount3,nCount4;int nSSS,nJSSpeed,pwm1;int md,wc;unsigned int nScreenBuffer[30*128];float a=0.6f,b=0.2f,c=0.1f,duk;int ek,ek1,ek2,tz;int nInput;unsigned int *www=(unsigned int *)0x608003;Int m_nSpeed,m_bPCSet;// 主函数main(){unsigned char ccc;int speed[100],sp,lj;float ljh;int i,w1,w2,w3;unsigned int uWork1;unsigned int bWork1,*pWork;int breakflage;// 初始化工作变量for ( sp=0;sp<100;sp++ )speed[sp]=0;for ( sp=0;sp<1024;sp++ ) nScreenBuffer[sp]=0;sp=nSSS=nCount=nCount1=nCount2=nCount3=nCount4= nJSSpeed=0;nInput=tz=wc =0;ek=ek1=ek2=0;uN=40;md=70;pwm1=60;m_nSpeed=70;m_bPCSet=0;inputspeed=0;uWork1=0;breakflage=0;initemif();CLK_init();*(int*)0x400001=1;CREG=1; //使能外部总线接口InitCTR();CTRGR=0x80;CTRGR=0;CTRGR=0x80;LCDTurnoff();// 设置显示参数和内容LCDSetDelay(1); //设置延时等待参数LCDSetScreenBuffer(nScreenBuffer); // 显示缓冲区for (bWork=0,pWork=nScreenBuffer;bWork<30*128;bWork++,pWork++) (*pWork=0)LCDTurnOn();//打开显示LCDCLS();//清除显示内存LCDPutCString(str1,0,127,8,0);LCDPutCString(str2,0,111,2,1);LCDPutCString(str3,68,111,2,1);LCDPutCString(str4,68,79,2,1);LCDPutCString(str5,68,95,2,1);LCDPutCString(str6,0,95,2,1);LCDPutCString(str7,0,79,3,1);ShowParamctors();//参数显示InitMcBSP();INTR-init();InitForMotorB();While(!breakflage){if(nCount==0) //读取键盘标志{uWork=MCTRKEY;CTRCLKEY=0;Switch(uWork1){Casc 128;if(inputspecd!=0){Md=inputspecd;Inputspecd=0;LCDPutCString(numbers+104,104,79,1,1); LCDPutCString(numbers+104,112,79,1,1); LCDPutCString(numbers+104,120,79,1,1); LCDRefreshScreen();}break;case 64;breakflage=1;case 1;inputspeed=inputspeed+1break;case 2;inputspeed=inputspeed-1;break;case 4;inputspeed=inputspeed+10;break;case 8;inputspeed=inputspeed-10;break;}if(inputspeed>90){inputspeed=90;}if(inputspeed<0){inputspeed=0;}w1=inputspeed%1000/100;w2=inputspeed%100/10;w3=in putspeed%10; LCDPutString(numbers+w1*8,104,79,1,1);LCDPutString(numbers+w2*8,112,79,1,1);LCDPutString(numbers+w3*8,120,79,1,1);LCDRefreshScreen();}if(m-bPCSet){m-bPCSst=0;if (m-nSpeed>=0&&m-nSpeed<256){md=m-nSpeed;LCDPutCString(numbers+104,104,79,1,1); LCDPutCString(numbers+104,112,79,1,1);LCDPutCString(numbers+104,120,79,1,1); LCDRefreshScreen();printparameters();}}if(nJSSpeed==0) //读取速度标志{LED=1;nJSSpeed=0;ccc=CTRMOTORBSPEED; //读取端口速度计数ccc=ccc&0xff;nSSS=ccc;if(nSSS>=0 && nSSS<400) //合法性检测{speed(sp)=Nssssp++;sp%=33;}if(sp==0) //读取实际速度{lj=0;ljh=0;for(i=0;i<33;i++){if(speed(i)>=0&&speed(i)<400){ljh+=speed(i);lj++;}}nCount3++;nCount3%=3;if(nCount3==2){PIDControl(md,wc); //调用PID算法控制程序uN=100-pwml; //利用占空比调整控制Showparameters(); //显示各参数到LCD }CloseCTR();exit(0);}//PID算法控制子程序void PIDControl(int rk,int yk){ek=rk-yk;duk=a*ek+b*ek1+c*ek2; //计算控制输出ek2=ek1; ek1=ek;tz=(int)duk;pwm1+=tz; //计算当前占空比if(pwml<0) pwml=0;else if(pwml>99) pwml=99;}void interrupt Timer(){uWork=PCR1; //pwml输出if(nCont1>u N){uWork=4; //根据占空比设置FSR状态}else{uWork&=0x0fffb;}PCR1=uWork;//设置中断控制寄存器void INTR-init(void){asm(“BSET INTM”);IVPD=0x01;IVPH=0x01;IERO=0x10;DBIERO=0x10;IFRO=0xffff;asm(“BCLR INTM”);}void InitForMotorB(void)ioport unsigned int *GPTCTL1-0;ioport unsigned int *GPTPRD1-0;ioport unsigned int *GPTGCTL1-0;*GPTCTL1-0=0;*GPTPRD1-0=0x1d8;*GPTGCTL1-0=0x3;}//显示参数到LCDvoid ShowParameters(){int w1,w2,w3;w1=md%1000/100;w2=md%100/10,w3=md%10; LCDPutString(numbers+w1*8,36,111,1,1); LCDPutString(numbers+w2*8,44,111,1,1); LCDPutString(numbers+w3*8,52,111,1,1);if (ek>=0){LCDPutString(numbers+88,36,95,1,1);w3=((int)ek)%100;}else{LCDPutString(numbers+96,36,95,1,1);w3=((int)(-ek))%100;}for (j=0;j<16;j++,k<<=1){if (color==2) mcolor=2;elsemcolor=(pData(1*8+i)&k)(1):(0);if(color==0) mcolor=1-mcolor;}LCDPutPixel(x+1*8+I,y-j,mcolor);}int wwss;void PrintParameters(){wwcc=wc-md;printf(“测速(%3d) 设置(%3d) 误差(%+4d) PID调整量(%+3d) 占空比(%3d%%)\n”,wc,md,wwcc,tz,pwm1);}。
PLC微机控制直流无刷电动机调速系统
一、概述电动机主要类型有同步电动机、异步电动机和直流电动机三种,而直流电动机具有运行效率高和调素性能好等诸多优点得以被广泛运用,但传统的直流电动机均采用电刷,以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火花、无线电干扰以及寿命短等致命弱点,再加上成本高及维修困难等缺点,大大限制了它的应用范围。
随着社会生产力和科学技术的发展,大功率开关器件、模拟和数字集成、高性能磁性材料技术等取得了很大的进步,又因直流无刷电动机具有寿命长、结构简单、运行可靠、维护方便等特点,在性能上,有启动转矩大、动态制动简便、转速——转矩特性呈线性及效率等优点而得以广泛应用。
(一)直流无刷电动机的基本组成环节及工作原理1、直流无刷电动机的基本组成环节直流无刷电动机的基本组成框图如图1-1所示。
它主要由电动机本体、位置传感器和电子开关线路三部分组成。
图1—1 直流无刷电动机的结构原理图电动机本体在结构上与永磁同步电动机相似,但没有笼形绕组和其它启动装置,它有永磁的转子和多相定子绕组。
多相定子绕组分别与电子开关线路中相应的功率开关器件联接。
位置传感器的跟踪转子与电动机转轴相联接,其信号在转子位置译码器中转换成正确的换相顺序信号,控制功率开关器件,使定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
因此,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位置传感器三者组成的“电动机系统”。
其中转子的永磁钢与永磁有刷电动机中所用的永磁钢的作用相似,均是在电动机的气隙中建立足够的磁场,其不同之处在于直流无刷电动机中永磁钢装在转子上,而直流有刷电动机的磁钢装在定子上。
直流无刷电动机的电子开关线路是用来控制动机定子上各相绕组通电的顺序和时间主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。
功率逻辑开关单元是控制电路的核心,其功能是将电源的功率以一定的逻辑关系分配给流无刷电动机定子上各相绕组,以便电动机产生持续不断的转矩。
c8051无刷直流电动机基本驱动代码
附录D -无刷直流电动机代码//------------------------------------------------------------------- //例子4//无刷直流电机控制//------------------------------------------------------------------- //版权所有2004 Silicon Laboratories公司////认证:KAB//日期:2004.05.24////这一程序规定,无刷直流电动机控制使用PCA为8位PWM模式。
一个单一的PCA模块生成//一个8位PWM 。
引脚跳过xbr0使PWM之间的三个输出p1.0,p1.1&p1.2多元化。
这三//个输出用于驱动下晶体管3相桥的配置。
p0.4p0.5&p0.6用来驱动上晶体管。
////ADC用来读取电位器p0.6上的电压。
ADC使用查询模式和64样品平均。
////p0.0,p0.1,p0.2用于霍尔效应传感器输入。
这个引脚用于确定转子位置。
The//readHalls() function需要三个相同的样本,并返回the hall code。
从//hallpattern发现电机的通讯状况,这种状况然后用于使电机方向转换。
////单步和使用断点只与电机电线断开是安全的。
不要通过代码单步与电机电线连接。
PWM输出//当CPU停止工作时仍然存在。
尤其不要单步越过那些产生PWM的电线。
这些电线应该在所//有盒式磁带程序设计系统中用注释标记好////目标: c8051f33x////工具链:KEIL Eval ‘c’//-----------------------------------------------------------------------------// Includes//-----------------------------------------------------------------------------#include <c8051f330.h> // SFR声明//-----------------------------------------------------------------------------// MACROS//-----------------------------------------------------------------------------#define GSAMP 3//-----------------------------------------------------------------------------// Hall-effect and commutation patterns霍尔效应和整流模式//-----------------------------------------------------------------------------const unsigned char code hallPattern[7]={ 0x00, 0x01, 0x03, 0x02, 0x06, 0x04, 0x05};const unsigned char code skipPattern[7]={~0x01,~0x01,~0x01,~0x02,~0x02,~0x04,~0x04};const unsigned char code P1Pattern[7]={~0x00,~0x20,~0x40,~0x40,~0x10,~0x10,~0x20};//-----------------------------------------------------------------------------// Function PROTOTYPES函数原型//-----------------------------------------------------------------------------void SYSCLK_Init (void);void PORT_Init (void);void PCA0_Init (void);void PCA0_ISR (void);void ADC_Init (void);unsigned char readVin(void);unsigned char avgVin(void);unsigned char readHalls(void);unsigned char hallPosition(void);void commutate(unsigned char);void coast(void);//-----------------------------------------------------------------------------// MAIN Routine主要例行//-----------------------------------------------------------------------------void main (void) {unsigned char h,p;bit start;PCA0MD &= ~0x40; // Disable Watchdog Timer禁用看门狗定时器SYSCLK_Init (); // initialize system clock初始化系统时钟PORT_Init (); // initialize i/o初始化输入/输出PCA0_Init (); // configure PCA0 to 8-bit PWM配置pca0至8位PWMADC_Init(); // initialize i/o初始化输入/输出EA = 1; // enable global interrupts使全球中断p = 0; // clear p清晰pstart = 1; // set start bit设定起始位while (1){h = hallPosition(); // h=霍尔位置if(h) //如果好的位置{if ((h != p)||(start)) //如果新的位置或启动{p = h; //更新p// DO NOT SINGLE-STEP PAST THE NEXT 不要单步过去THE NEXT// LINE WITH MOTOR WIRES CONNECTED 线路与电机电线连接commutate(p); // commutate motor, enables PWM commutate电机,使脉宽调制start = 0;}PCA0CPH0 = avgVin(); // get avg reading and output to PWM获得平均阅读和输出的PWM }else{ coast(); // coast until good reading coast直至良好的阅读start = 1; // set start bit to restart motor设定起始位,以重新启动马达}}}//-----------------------------------------------------------------------------// SYSCLK_Init//-----------------------------------------------------------------------------void SYSCLK_Init (void){OSCICN = 0x83; // configure for 24.5 MHz配置为24.5兆赫}//-----------------------------------------------------------------------------// PORT_Init//-----------------------------------------------------------------------------//// Configure the Crossbar and GPIO ports.配置了横梁和GPIO端口// P0.0 - HA// P0.1 - HB// P0.2 - HC// P0.3 -// P0.4 -// P0.5 -// P0.6 -// P0.7 - Vin - analog input//// P1.0 - Abottom - push-pull output// P1.1 - Bbot - push-pull output// P1.2 - Cbot - push-pull output// P1.3 -// P1.4 - Atop - push-pull output// P1.5 - Btop - push-pull output// P1.6 - Ctop - push-pull output// P1.7 -//void PORT_Init (void){XBR0 = 0x00; // enable nothing on XBR0 使XBR0=0XBR1 = 0x01; // enable PCA CEX0P0SKIP = 0xFF; // skip all pins on P0跳过P0所有管脚P0MDIN =~0x80; // P0.7 analog input p0.7模拟输入P1SKIP =~0x01; // skip all except P1.0除p1.0其余跳过P1MDOUT = 0x77; // enable P1 outputsXBR1 |= 0x40; // enable crossbarP1 = 0xff; // P1 all high}//-----------------------------------------------------------------------------// PCA0_Init//-----------------------------------------------------------------------------void PCA0_Init (void){PCA0MD = 0x02; // PCA uses sysclk/4, no CF intPCA0CPM0 = 0x00; // clear mode, pin highPCA0L = 0x00; // reset the timer重置计时器PCA0H = 0x00;PCA0CPH0 = 0x00; // initial to 0%CR = 1; // START PCA0 timer开始pca0计时器}//-----------------------------------------------------------------------------// coast function//-----------------------------------------------------------------------------void coast(void){PCA0CPM0 = 0x00; // disable PWM禁用PWMP1 = 0xff; // disable upper transistors禁用上晶体管}//-----------------------------------------------------------------------------// readHalls function//-----------------------------------------------------------------------------// reads and debounces Hall-Sensor inputs读取并debounces霍尔传感器输入unsigned char readHalls(void){unsigned char g,h,i;g = 0;h = 0;while (g<GSAMP) // while less that 3 good samples{i = P0 & 0x07; // read hallsif (h == i) // if the sameg++; // one more goodelseg = 0; // else start overh = i; // update h}return h; // return good hall code}//-----------------------------------------------------------------------------// hallPosition function//----------------------------------------------------------------------------- unsigned char hallPosition (void){unsigned char h,p;h = readHalls(); // get debounced hall reading// find corresponding pattern index寻找相应的模式指数for (p=6;(h != hallPattern[p])&&(p!=0);p--);return p;}//-----------------------------------------------------------------------------// hallPosition function//-----------------------------------------------------------------------------void commutate (unsigned char i){ PCA0CPM0 = 0x00; // disable PWMP1 = 0xFF;XBR1 &= ~0x40; // disable crossbarP1SKIP = skipPattern[i];P1 = P1Pattern[i];XBR1 |= 0x40; // enable crossbar// DO NOT SINGLE-STEP PAST THE NEXT// LINE WITH MOTOR WIRES CONNECTEDPCA0CPM0 = 0x42; // enable 8-bit PWM mode}//-----------------------------------------------------------------------------// ADC functions//-----------------------------------------------------------------------------void ADC_Init(void){AMX0P = 0x07; // positive input P0.7AMX0N = 0x11; // single ended mode单端模式ADC0CF = 0xC4; // 1MHz clock, left justified 1MHz的时钟,左有道理ADC0CN = 0x80; // configure ADC for polled mode配置ADC为调查模式REF0CN = 0x08; // use Vdd as ADC full scale}unsigned char readVin(void){AD0INT = 0; // clear ADC0 end-of-conversionAD0BUSY = 1; // initiate conversion启动转换while (!AD0INT); // wait for conversion to complete等待转换完成return ADC0H;}unsigned char avgVin(void){unsigned char i, result;unsigned int sum;sum = 0;for (i = 64; i != 0; i--) // repeat 64 times重复64次{sum += readVin(); // read ADC and add to sum读取ADC和与sum相加}result = (unsigned char)(sum>>6); // divide by 64 and cast to uchar除以64并设为uchar数据return result; // return average reading回到average reading}。
基于DSP和IPM的三相无刷直流电机控制系统
第25卷 第1期吉林大学学报(信息科学版)Vol .25 No .12007年1月Journal of J ilin University (I nfor mati on Science Editi on )Jan 12007文章编号:167125896(2007)0120062206收稿日期:2006209206基金项目:国家重点基础研究发展规划973计划基金资助项目(2002CB412600)作者简介:王春民(1948— ),男,内蒙古乌兰浩特人,吉林大学副教授,主要从事现代控制理论、运动控制系统、辩识与建模的研究,(Tel )86213578899158(E 2mail )wc m@jlu .edu .cn;乔瑞芳(1981— ),女,河南开封人,吉林大学硕士研究生,主要从事电力电子研究,(Tel )86213504327310(E 2mail )ruifang mail@;安海忠(1954— ),男,吉林洮南人,吉林大学高级工程师,主要从事单片机教学、低噪声电源的研究,(Tel )86213043330066(E 2mail )anhz@jlu .edu .cn 。
基于DSP 和I P M 的三相无刷直流电机控制系统王春民,乔瑞芳,安海忠(吉林大学仪器科学与电气工程学院,长春130061)摘要:为了提高电动机的控制性能,用高性能微处理器DSP (D igital Signal Pr ocess or )和I P M (I ntelligent Power Module )对已有的模拟控制系统进行了改进。
系统由DSP 最小系统、智能功率驱动模块、隔离模块等组成,用DSP 汇编语言编程。
与现有的模拟控制电路相比,其结构简单。
实验结果表明,系统调速范围可达到10~1000r/m in,有较宽的调速范围。
关键词:直流无刷电机;数字信号处理器;控制;智能功率模块中图分类号:TP273;T M92115;T N914文献标识码:AThree Phase B rushless DC Mot or Contr ol SystemBased on DSP and I P MWANG Chun 2m in,Q I A O Rui 2fang,AN Hai 2zhong(College of I nstrument Science and Electrical Engineering,Jilin University,Changchun 130061,China )Abstract:A three 2phase brushless DC (D irect Current )mot or contr ol syste m based on DSP (D igital Signal Pr ocess or )and I P M (I ntelligent Power Module )is intr oduced .The syste m consists of the m ini m um syste m of DSP,I P M ,is olati on module and s o on .The p r ogra mm ing is realized thr ough the DSP asse mbling language .The experi m ental results indicate that the syste m has the characteristics of wide range of s peed regulati on and good contr ol functi onKey words:brushless direct current mot or;digital signal p r ocess or (DSP );contr ol;intelligent power module(I P M )引 言.直流无刷电机具有高速度、高效率、高动态响应、高热容量、高可靠性、低噪声和长寿命等优点[1],随着高性能的单片机和专门用途的DSP (D igital Signal Pr ocess or )微处理器的发展,无刷直流电机的位置检测和换相更加准确稳定。
无刷直流电机的保护电路
无刷直流电机的保护电路摘要:为了使无刷直流电机长期稳定运行,采用加保护电路的方法使其正常工作,保护电路主要由欠压保护、过流保护、短路保护等组成,在软件里设置电压、电流的阈值,直接对电压、电流进行检测并产生相应的保护,以免对电路和电机造成损害,并且做了相应的欠压、过压、过流测试实验。
实践应用表明,该设计的几种方案切实可行,能够在异常情况下及时对电机做出保护动作。
关键词:无刷直流电机;欠压保护;过压保护;过流保护0 引言电机广泛应用于人们的生产、生活及科研等各个领域,因此各种类型的电机保护装置应运而生,如欠压保护、过压保护及过流保护等。
这些保护装置相互独立,不仅安装麻烦,总体生产成本高,而且在电机正常运行过程中,还要消耗一定的电能,造成能源浪费。
其实,上述保护装置,归根到底都是预防电机因自身过热而烧毁。
本文给出几种电机的保护方案,它不仅响应速度快,控制可靠,而且大大地降低了保护装置的生产成本。
该保护电路与传统的保护电路相比,省去了热继电器、交流接触器等保护装置的能耗,与电机为一体。
经测试验证,效果良好。
1 电流检测原理要实现过流保护,首要的任务是检测电机的电流。
通常有2种检测电流的方法:(1)小阻值无感采样电阻。
通常采用康铜丝或者贴片件,这是一种廉价的方案,但是要注意采样电阻阻值的选取,功率要足够大,同时电阻的电感要小,以排除感抗在电阻两端引起的电压降。
(2)霍尔电流传感器。
适合驱动开发,采用LEM公司的LA28-NP霍尔电流传感器的电流测量,它的优点是精度高,可靠性高。
在电流采样的位置上也有2种方法可以选择:(1)相电流采样。
将采样电阻或者霍尔电流传感器置于每一相,假设三相电流分别为ia,ib和ic,又因为无刷电机的三相电流有如下关系:ia+ib+ic=0,所以只要检测出无刷电机中两相电流就可以得到另一相的电流信息。
(2)母线电流采样。
一般是将采样电阻或者电力传感器置于母线负侧进行电流采样。
下面介绍一种基于LEM霍尔电流传感器采样母线电流的方法,该方法精度高,可靠性高。