自由度机械手运动控制
3自由度的机械手控制器设计原理
3自由度的机械手控制器设计原理3自由度的机械手是指可以在三个方向上移动的机械手,通常是由三个关节组成的。
这样的机械手可以进行基本的平移和旋转运动,可以用于各种应用场景,如工业生产、医疗手术和科研实验等。
为了实现对3自由度机械手的精确控制,需要设计一个有效的控制器来实现对机械手的精准运动控制。
3自由度机械手的控制器设计原理主要包括以下几个方面:1.传感器系统设计:传感器系统是机械手控制器的基础,通过传感器系统可以获取机械手的位置、速度和力信息。
在设计3自由度机械手的控制器时,需要选择合适的传感器来获取机械手各个关节的位置信息,以实现对机械手的闭环控制。
常用的传感器包括编码器、惯性传感器和力传感器等。
2.运动控制算法设计:运动控制算法是机械手控制器的核心部分,通过运动控制算法可以实现对机械手的轨迹规划和动态控制。
在设计3自由度机械手的控制器时,通常采用PID控制算法或者模型预测控制算法来实现对机械手的动态控制。
PID控制算法通过调节比例、积分和微分参数来实现对机械手位置和速度的精确控制,而模型预测控制算法则通过对机械手的动态模型进行建模,并利用预测控制器来预测未来的行为,并实现对机械手的精确控制。
3.人机交互界面设计:为了方便用户对机械手进行操作和监控,需要设计一个友好的人机交互界面。
在设计3自由度机械手的控制器时,可以采用图形界面或者虚拟现实界面来实现对机械手的控制和监控。
通过人机交互界面,用户可以实时监控机械手的状态,并进行控制参数的设定和调整,以实现对机械手的精确控制。
总的来说,设计一个有效的3自由度机械手控制器需要综合考虑传感器系统设计、运动控制算法设计和人机交互界面设计等方面,通过合理的设计和实现,可以实现对机械手的精确控制,并满足不同应用场景的需求。
通过不断优化和改进,可以实现对机械手的更精准和高效的控制,为各种应用场景提供更好的解决方案。
四自由度机械手PLC控制
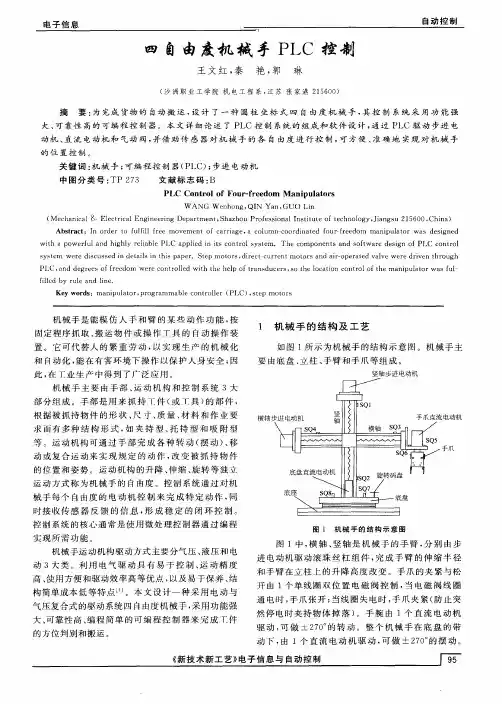
要 由 底 盘 、立 柱 、手 臂 和 手 爪 等 组 成 。
竖 轴步 进 电动机
横轴
图 1 机 械 手 的 结 构 示 意 图
图 1中 ,横轴 、竖 轴 是 机 械手 的手 臂 ,分 别 由步 进 电 动 机 驱 动 滚 珠 丝 杠 组 件 ,完 成 手 臂 的 伸 缩 半 径 和手 臂在 立柱 上 的升 降高度 改变 。手 爪 的夹 紧与松 开 由 1个 单 线 圈 双 位 置 电 磁 阀 控 制 ,当 电 磁 阀 线 圈 通 电 时 ,手 爪 张 开 ;当 线 圈 失 电 时 ,手 爪 夹 紧 (防 止 突 然 停 电 时 夹 持 物 体 掉 落 )。 手 腕 由 1个 直 流 电 动 机 驱 动 ,可 做 ± 270。的 转 动 。整 个 机 械 手 在 底 盘 的 带 动 下 ,由 1个 直 流 电 动 机 驱 动 ,可 做 4-270。的 摆 动 。
机 械 手 运 动 机 构 驱 动 方 式 主要 分 气 压 、液 压 和 电 动 3大类 。利 用 电气驱 动具 有 易 于 控 制 、运 动精 度 高 、使用方 便和驱 动效 率高等优 点 ,以及 易 于保养 、结 构简单 成本低 等 特点 j。本 文设 计 一种 采用 电动 与 气压复合 式 的驱动 系统 四 自由度 机械 手 ,采用 功能 强 大 、可靠性 高 、编程 简单 的可 编程 控制 器 来完 成 T件 的方位 判别和搬运 。
六自由度机械手复杂运动控制
本文以示教型六自由度串联机械手为试验设备,进行机械手的复杂运动控制,使机械手完成各种复杂轨迹的运动控制等功能,能够在现代工业焊接、喷漆等方面的任务。
本文从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。
目前,六自由度机械手的复杂运动控制已经有了比较好的逆解算法,也有一些针对欠自由度机械手的逆解算法。
逆解算法求出的解不是唯一的,它能使机械手达到更多位姿,完成大部分的原计划任务,但其中的一些解并不是最优化的,因此必须讨论其反解的存在性和唯一性。
本文通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。
因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。
然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。
并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。
最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。
即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。
关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄ABSTRACTIn this paper, mechanical hand control the complex movement based on the series of six degrees of freedom manipulator so that the mechanical hand complete the complex trajectory of the movement control functions. In modern industrial welding, painting, and other aspects of the mandate can be used.This article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. At present, the six degrees of freedom manipulator complex movement has been relatively good control of the inverse algorithm.There are also some less freedom for the inverse of the manipulator algorithm. Solutions sought by inverse algorithm is not the only solution, it can reach more manipulator Pose, originally planned to complete most of the task.But some of these solutions is not the most optimal, it is necessary to discuss their anti-the existence of solutions and uniqueness.Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists.So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended procedures.The eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct.The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming.key words:Six degree-of-freedom manipulators,Cartesian coordinates,Equations of motion,Simulation,Demonstration handle.绪论 (1)课题研究背景和意义 (1)国内外研究状况 (2)六自由度机械手复杂运动控制的现实意义 (4)课题的提出 (5)本课题研究的主要内容 (5)串联机器人运动学 (7)2.1 机器人运动学方程的表示 (7)2.1.1 运动姿态和方向角 (8)2.1.2 运动位置和坐标 (9)2.1.3 连杆变换矩阵及其乘和 (12)2.2 机械手运动方程的求解 (15)2.2.1 欧拉变换解 (16)2.2.2 滚、仰、偏变换解 (20)2.2.3 球面变换解 (21)2.3 反解的存在性和唯一性 (23)2.3.1 反解的存在性和工作空间 (23)2.3.2 反解的唯一性和最优解 (24)2.3.3 求解方法 (25)六自由度机械手的平面复杂轨迹设计及运动学分析 (27)3.1 系统描述及机械手运动轨迹设计方式 (27)3.1.1 机器人技术参数一览表 (27)3.1.2 机器人控制系统软件的主界面 (27)3.1.3 机器人各部位和动作轴名称 (28)3.1.4 机械手运动轨迹设计方式 (29)3.2 平面复杂轨迹设计目的 (33)3.2.1“西”字的轨迹设计和分析 (33)3.2.2“南”字的轨迹设计和分析 (34)3.2.3机械手的起始位姿和末态位姿 (35)3.3机械手轨迹设计中坐标系的建立 (35)3.4 平面轨迹设计的正运动学分析 (43)3.4.1平面轨迹设计的正运动学分析原理 (43)3.4.2 正运动学分析步骤及计算 (44)3.5 平面轨迹设计的逆运动学分析 (45)3.5.1 平面轨迹设计的逆运动学分析原理 (45)3.5.2.逆运动学分析步骤及计算 (46)设计实现过程和MA TLAB仿真计算 (50)4.1 设计实现过程 (50)4.2 MA TLAB仿真计算 (53)结论与展望 (57)5.1 结论 (57)5.2 展望 (58)致谢 (59)参考文献 (60)第一章绪论1.1 课题研究背景和意义在现代制造行业中,先进的制造技术不断的代替传统的加工方法和操作方式。
6自由度机械手的算法
6自由度机械手的算法介绍6自由度机械手是一种具有6个自由度的机械臂,可以在空间中完成复杂的运动任务。
为了实现机械手的精确控制和运动规划,需要使用一系列算法来实现。
本文将探讨6自由度机械手的算法,包括逆运动学、正运动学、轨迹规划等。
逆运动学逆运动学是指已知机械手末端位置和姿态,计算出各个关节角度的过程。
对于6自由度机械手而言,逆运动学问题是一个复杂的数学问题。
以下是逆运动学算法的基本步骤:1.确定机械手的DH参数,包括关节长度、关节偏移、关节旋转角度等。
2.根据机械手的DH参数,构建正运动学方程,即末端位置和关节角度的关系。
3.根据末端位置和姿态,求解正运动学方程,得到关节角度的解。
4.对于多解的情况,选择最优解,例如使关节角度变化最小或满足特定约束条件的解。
正运动学正运动学是指已知机械手各个关节角度,计算出末端位置和姿态的过程。
对于6自由度机械手而言,正运动学问题相对简单,可以通过矩阵变换来实现。
以下是正运动学算法的基本步骤:1.确定机械手的DH参数。
2.根据机械手的DH参数,构建正运动学方程,即关节角度和末端位置的关系。
3.根据关节角度,求解正运动学方程,得到末端位置的解。
轨迹规划轨迹规划是指在给定起始位置和目标位置的情况下,确定机械手的运动路径和速度的过程。
对于6自由度机械手而言,轨迹规划需要考虑运动的平滑性和避免碰撞等因素。
以下是轨迹规划算法的基本步骤:1.确定起始位置和目标位置。
2.根据起始位置和目标位置,计算出机械手的途径点和运动方向。
3.根据途径点和运动方向,生成平滑的运动路径。
4.考虑机械手的运动速度和加速度,生成合适的速度曲线。
5.考虑碰撞检测,避免机械手和其他物体的碰撞。
动力学建模动力学建模是指根据机械手的结构和参数,建立机械手的运动学和动力学模型的过程。
对于6自由度机械手而言,动力学建模需要考虑关节间的耦合效应和惯性等因素。
以下是动力学建模的基本步骤:1.确定机械手的质量、惯性等参数。
基于MATLAB五自由度机械手运动学仿真分析
基于MATLAB五自由度机械手运动学仿真分析五自由度机械手是一种具有五个独立自由度的机械装置,可以实现复杂的姿态和路径规划。
为了研究其运动学特性,可以使用MATLAB进行仿真分析。
本文将基于MATLAB对五自由度机械手的运动学进行仿真分析,包括直接运动学和逆运动学。
首先,我们需要定义机械手的结构和参数。
五自由度机械手通常由五个关节连接而成,每个关节的旋转角度可以通过电机控制。
我们可以使用DH参数建立机械手的运动学模型,在MATLAB中定义每个关节的DH参数。
DH参数包括关节的长度、偏移、旋转角度和连接方式等。
在定义了机械手的结构和参数之后,我们可以进行直接运动学分析。
直接运动学是指根据机械手的关节角度计算末端执行器的位置和姿态。
在MATLAB中,可以使用正运动学算法根据给定的关节角度计算末端执行器的位置和姿态。
这个过程可以通过建立运动学模型和坐标变换矩阵实现,在MATLAB中可以使用符号计算工具箱对模型进行符号计算,得到末端执行器的位置和姿态的闭式解。
接下来,我们可以进行逆运动学分析。
逆运动学是指根据机械手的末端执行器位置和姿态计算关节角度。
在MATLAB中,可以使用逆运动学算法根据给定的末端执行器的位置和姿态计算关节角度。
这个过程通常需要使用数值方法进行迭代求解,MATLAB提供了多种数值求解方法,如牛顿法和Levenberg-Marquardt算法等。
我们可以使用这些算法对逆运动学进行求解,得到关节角度的解。
在进行仿真分析之前,我们还需要定义机械手的工作空间。
工作空间是机械手可以达到的位置和姿态的集合。
对于五自由度机械手,可以使用三维空间中的一个区域表示其工作空间。
在MATLAB中,可以定义一个三维空间的体积,在此体积内的点被认为是机械手的工作空间。
在MATLAB中进行仿真分析时,可以使用图形界面工具进行交互式仿真分析。
MATLAB提供了多种可视化和动画功能,可以实时显示机械手的运动过程和工作空间。
五自由度机械手抓取运动学逆解算法python
五自由度机械手抓取运动学逆解算法python五自由度机械手抓取运动学逆解算法Python实现1. 引言在现代工业生产中,机械手广泛应用于物料搬运和生产操作等领域。
其中,五自由度机械手是一种常见且经济高效的机械手类型。
机械手的关键问题之一是运动学逆解算法,即根据末端执行器(抓爪)位置和姿态,计算关节坐标以实现准确抓取动作。
本文将介绍基于Python 语言的五自由度机械手抓取运动学逆解算法的实现方法,以帮助读者理解和应用该算法。
2. 五自由度机械手运动学概述五自由度机械手具有五个关节,分别控制机械手的运动。
机械手的抓取运动学逆解算法的目的是根据末端执行器的位置和姿态,计算出五个关节的坐标。
3. 运动学逆解算法的基本原理(1)确定末端执行器的位置和姿态我们需要确定末端执行器的位置和姿态。
通过传感器或外部测量,可以获取末端执行器的三维坐标和姿态数据。
(2)坐标转换将末端执行器的位置和姿态数据,转换为机械手坐标系中的坐标数据。
这需要进行坐标系的变换和旋转运算。
(3)运动学逆解算法根据机械手的机构参数、关节类型和末端执行器的坐标数据,可以利用几何方法或数值计算方法,计算出机械手的关节坐标。
4. 五自由度机械手抓取运动学逆解算法的Python实现为了实现五自由度机械手的抓取运动学逆解算法,我们可以使用Python编程语言。
下面是该算法的实现步骤。
(1)导入所需库和模块我们首先导入所需的库和模块,例如NumPy库用于数值计算和矩阵操作。
(2)定义机械手参数根据实际机械手的参数,我们定义关节长度、关节类型和关节个数等参数。
(3)定义逆解算函数编写一个逆解算函数,输入为末端执行器的位置和姿态数据,输出为机械手的关节坐标。
函数内部实现逆解算的算法。
(4)编写主程序编写主程序来调用逆解算函数,并输出结果。
5. 个人观点和理解五自由度机械手抓取运动学逆解算法是机械手控制领域的重要研究内容。
通过深入理解运动学逆解算法,我们可以更好地控制机械手的运动,实现精准的抓取操作。
六自由度机械手的坐标建立及运动学分析
六自由度机械手的坐标建立及运动学分析1.坐标建立:在六自由度机械手的坐标建立中,一般采用DH约定法(Denavit-Hartenberg法)来建立坐标系。
DH法是一种常用的方法,能够简化坐标系的描述,方便运动学分析。
首先,根据机械手的实际结构和运动方式,确定基座系(O-1-X1-Y1-Z1)和工具系(O-6-X6-Y6-Z6)两个坐标系。
其中,基座系固定在机械手的基座上,而工具系固定在机械手臂的末端执行器部分。
然后,根据机械手的连杆关系,逐个确定每个连杆的坐标系。
对于每个连杆的坐标系,可以通过以下几个步骤确定:1)确定连杆旋转轴,选择旋转轴为Z轴。
2)确定连杆的连杆中心线与相邻连杆中心线的夹角,选择夹角为连杆坐标系的转角θ。
3)确定连杆坐标系的原点与相邻连杆坐标系的原点之间的距离,选择距离为连杆坐标系的运动方向z。
4)确定连杆坐标系的x轴,通过右手定则确定。
根据以上步骤,可以逐个确定各个连杆的坐标系,最终建立整个六自由度机械手的坐标系。
2.运动学分析:运动学正解是指通过给定每个关节的转角,计算末端执行器的位置和姿态。
运动学正解的计算可以采用连乘法则,从基座系逐步向前计算每个连杆的变换矩阵,最终得到末端执行器的变换矩阵。
运动学逆解是指通过给定末端执行器的位置和姿态,计算每个关节的转角。
运动学逆解的计算可以通过逆运动学方法实现,其中一种常用的方法是通过解析法,通过求解多元非线性方程组得到关节转角的解析解。
在进行运动学分析时,还需要考虑机械手的工作空间限制、奇异位置的问题以及碰撞检测等。
因此,在实际运动学分析中,可能需要进行机器人的轨迹规划和路径规划。
总结:六自由度机械手的坐标建立和运动学分析是机械手设计和控制的基础。
通过建立机械手的坐标系,可以方便地描述六自由度机械手的结构和运动方式。
而运动学分析可以通过运动学正解和逆解,实现机械手的位置和姿态的计算。
熟练掌握六自由度机械手的坐标建立和运动学分析,对于机械手的设计和控制具有重要意义。
本科毕业论文-基于单片机的多自由度机械手臂控制器设计解析
唐山学院毕业设计设计题目:基于单片机的多自由度机械手臂控制器设计系别:信息工程系班级:11电气工程及其自动化3班姓名:刘亮指导教师:田红霞2015年6月1日基于单片机的多自由度机械手臂控制器设计摘要机械臂控制器作为机械臂的大脑,对于它的研究有着十分重要的意义。
随着微电子技术和控制方法的不断进步,以单片机作为控制器的控制系统越来越成熟。
本课题正是基于单片机的机械臂控制系统的研究。
本文首先介绍了国内外机械臂发展状况以及控制系统的发展状况。
其次,阐述了四自由度机械手臂控制系统的硬件电路设计及软件实现。
详细阐述了机械臂控制系统中单片机及其外围电路设计、电源电路设计和舵机驱动电路设计。
在程序设计中,着重介绍了利用微分插补法进行PWM调速的程序设计。
并给出了控制器软件设计及流程图。
最后,给出了系统调试中出现的软硬件问题,进行了详细的分析并给出了相应的解决办法。
关键词:机械臂单片机自由度舵机PWMDesign of Multi DOF Manipulator ControllerBased on MCUAbstractAs the brain of robot arm, manipulator controller is very important for its research.With the development of microelectronics technology and control method, the control system of MCU is becoming more and more mature.This thesis is based on the research of the manipulator control system of MCU.Firstly,it is introduced the development of the manipulator and the control system at home and abroad.Secondly,it is given the circuit and software design for the four DOF manipulator in this disertation.it is expatiated the Single Chip Microcomputer(SCM),the relative circuit design ,Power circuit design,and driver circuit design of manipulator control system.In the design of the program, the design of PWM speed regulation by differential interpolation is introduced emphatically. The software design and flow chart of the controller are given.Finally,it is presented the problems of hardware and software in practive given resolves.Key word: Manipulator;MCU;DOF;Steering engine;PWM目录1引言 (1)1.1研究的背景和意义 (1)1.2国内外机械臂研究现状 (2)1.2.1国外机械臂研究现状 (2)1.2.2国内机械臂研究现状 (3)1.3机械臂控制器的发展现状 (3)1.4本设计研究的任务 (4)2机械结构与控制系统概述 (5)2.1机械结构 (5)2.2控制系统 (6)2.3系统功能介绍 (8)2.4舵机工作原理与控制方法 (8)2.4.1概述 (8)2.4.2舵机的组成 (8)2.4.3舵机工作原理 (9)3系统硬件电路设计 (11)3.1时钟电路设计 (11)3.2复位电路设计 (11)3.3控制器电源电路设计 (12)3.4舵机驱动电路 (13)3.5串口通信电路设计 (13)4系统软件设计 (14)4.1四自由机械臂轨迹规划 (15)4.2主程序设计 (16)4.3舵机调速程序设计 (17)4.3.1舵机PWM信号 (17)4.3.2利用微分插补法实现对多路PWM信号的输出 (18)4.4初末位置置换子程序 (21)4.5机械爪控制程序 (22)4.6定时器中断子程序 (23)4.6.1定时器T1中断程序 (23)4.6.2定时器T0中断子程序 (24)5系统软硬件调试 (25)5.1单片机系统开发调试工具 (25)5.1.1编程器 (25)5.1.2集成开发环境Keil和Protues (25)5.2控制系统的仿真 (26)5.3软件调试 (27)5.4硬件调试 (27)5.5软硬件联合调试 (28)6结论 (29)谢辞 (30)参考文献 (31)附录 (32)1引言1.1研究的背景和意义机器人是传统的机械结构学结合现代电子技术、电机学、计算机科学、控制理论、信息科学和传感器技术等多学科综合性高新技术产物,它是一种拟生结构、高速运行、重复操作和高精度机电一体化的自动化设备。
基于PLC的五自由度搬运机械手控制系统设计与建立
基于PLC 的五自由度搬运机械手控制系统设计与建立①潘云忠(苏州健雄职业技术学院,江苏太仓215411)机械手是一种能模拟人的手臂动作,按照设定程序、轨迹和要求,代替人手进行抓取、搬运工件或操持工具的机电一体化自动装置。
五自由度机械手即能够实现五个自由度的运动(水平移动、垂直移动、伸出缩回、下降上升和夹紧松开)。
本文采用的可编程控制器是西门子公司生产的S7-200系列PLC ,其功能强大、可靠性高、抗干扰能力强、编程简便。
配套人机(HMI )界面可采用SMART700,界面操作简单,内容丰富。
基于以上的特性,使得S7-200系列PLC 在中小型工业控制系统中被广泛应用。
本文机械手的水平移动和垂直移动驱动采用步进电机控制方式。
步进电机将PLC 输出的高速电脉冲信号转变为电机的角位移。
在通常情况下,电机的启动、停止、转速快慢只取决于输入的电脉冲信号的频率和脉冲数目。
脉冲频率控制电机的转速,脉冲的数量控制电机的角位移。
正是由于脉冲信号的频率和转速之间的这一线性关系,以及步进电机无累计误差这一特点,使其在速度、定位等控制领域应用得非常广泛。
机械手的夹紧松开动作由气缸控制完成。
本文设计的五自由度机械手属于电动与气压驱动混合式驱动的机械手,它综合了两种驱动方式优点,既节省了位置开关和PLC 的I/O 点数,又达到了简便操作和精确定位的目的。
一、机械手的机械结构及运动方式五自由度机械手机械结构主视图如图1所示,机械手水平方向的移动由步进电机(40)通过其上所连接的丝杆实现,垂直方向的移动由步进电机(45)通过其上所连接的丝杆实现,这两个方向的移动通过步进电机的顺时针和逆时针旋转运动实现水平左右移动和垂直上下移动。
4576465966547265804443426261645753555658414075图1机械手的机械结构主视图机械手的外伸、下降及夹紧装置采用气压驱动,并由对应的电磁阀控制,来实现对应的外伸缩回、下降上升、夹紧松开动作。
3个自由度机械手设计
3个自由度机械手设计在机械工程领域,自由度是指机械系统能够相对于给定的参考坐标系进行自由移动的能力。
一个自由度可以定义为系统中独立运动的最小数量。
在机械手设计中,自由度是一个重要的参数,决定了机械手的灵活性和能够执行的运动任务。
以下是三个具有不同自由度的机械手设计:1.二自由度机械手二自由度机械手通常由两个旋转关节组成,分别控制机械手在水平和垂直方向上的运动。
这种机械手设计常用于需要在平面上移动和旋转物体的应用,如装配线上的零件搬运和放置。
机械手的两个关节可以通过电机和传动装置控制,使得机械手能够沿不同方向进行精确的运动。
2.三自由度机械手三自由度机械手通常由两个旋转关节和一个直线关节组成,分别控制机械手在水平、垂直和前后方向上的运动。
这种机械手设计常用于需要进行更复杂操作的应用,如工业机器人中的装配和焊接。
机械手的旋转关节可以使机械手在水平和垂直方向上进行精确的定位,直线关节可以使机械手在前后方向上进行伸缩,从而实现更加灵活的操作。
3.六自由度机械手六自由度机械手是最常见的机械手设计,通常由三个旋转关节和三个直线关节组成。
旋转关节控制机械手在水平、垂直和绕轴方向上的运动,直线关节控制机械手在前后、左右和上下方向上的运动。
这种机械手设计在许多领域中得到广泛应用,如汽车制造、医疗设备和航空航天等。
六自由度机械手的设计使得机械手能够进行复杂的运动和操作,具有较高的灵活性和精确性。
总的来说,机械手的自由度是机械手设计中的一个重要参数,决定了机械手的灵活性和能够执行的运动任务。
不同自由度的机械手适用于不同应用场景,可以根据具体需求选择合适的机械手设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自由度机械手运动控制公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-西南交通大学本科毕业设计(论文)六自由度机械手复杂运动控制年级:200X级学号:200XXXX姓名:XXX专业: 机械工程系数控技术指导老师:XXX0X年 6月院系机械工程系专业数控技术年级 200X级姓名 XXX 题目六自由度机械手复杂运动控制指导教师评语指导教师 (签章)评阅人评语评阅人 (签章)成绩答辩委员会主任 (签章)年月日毕业设计(论文)任务书班级 0X级数控技术(1)班学生姓名 XXX 学号 200XXXXX 发题日期: 0X年 3月 1 日完成日期: 6月18日题目六自由度机械手复杂运动控制1、本论文的目的、意义本设计主要以实验室设备(六自由度串联机械手)为基础,运用六自由度串联机械手完成现实工程及实际需要为出发点。
通过对机械手的系统分析建立机器人坐标系的方法,并对其进行正运动分析和逆运动学分析结合矩阵的变换等研究该机器人系统在平面轨迹方面的设计。
并利用MATLAB对该设计的准确行进行验证。
本次设计让我们能有效的利用学校的设备对实际需要进行分析设计,从而使我们能将理论与实际有效结合。
并从中掌握了工程设计的主要方法和了解了现存技术中需要我们进行探索的必要。
2、学生应完成的任务由于本课题取材于实际生产运用中,不仅从理论方面对设计有分析等要求,更要结合理论做出实际需要的运动控制。
下面主要以学生的设计为主提出其需要完成的任务:(1)完成一万字符的外文翻译;(2)完成复杂运动控制设计的总体方案;(3)通过老师指导可以对机械手进行熟悉的操作和运用;(4)利用现有资料对机械手进行运动学理论分析,并结合矩阵工具对其建立的运动学方程进行求解;(5)利用机械手完成平面文字轨迹的运动控制;(6)对复杂运动控制的总结,分析其优缺点,并提出其缺点的解决方案和需要注意的问题;(7)完成毕业设计论文。
3、论文各部分内容及时间分配:(共 17 周)第一部分阅读相关文献并收集资料 ( 3周)第二部分熟悉设备操作并进行相关简单的操作( 3周)第三部分轨迹设计过程和相关计算分析( 4周)第四部分完成设计部分到实际运行部分( 3周)第五部分撰写毕业论文( 2周)评阅及答辩准备好答辩的演示文档及进行答辩( 2周)备注指导教师: XXX 0X年 3月日审批人:年月日摘要本文以示教型六自由度串联机械手为试验设备,进行机械手的复杂运动控制,使机械手完成各种复杂轨迹的运动控制等功能,能够在现代工业焊接、喷漆等方面的任务。
本文从运动学分析的基础上着手研究轨迹控制的问题,利用运动学逆解的方式分析复杂轨迹运动的可行性和实用性。
目前,六自由度机械手的复杂运动控制已经有了比较好的逆解算法,也有一些针对欠自由度机械手的逆解算法。
逆解算法求出的解不是唯一的,它能使机械手达到更多位姿,完成大部分的原计划任务,但其中的一些解并不是最优化的,因此必须讨论其反解的存在性和唯一性。
本文通过建立机械手的笛卡尔坐标系,推导出机械手的正、逆运动学矩阵方程,并研究了正、逆运动学方程的解;在此基础上建立机械手的工作空间,并讨论其工作空间的灵活性和存在可能性。
因此本文的另一种方式对六自由度串联机械手的复杂运动控制问题进行研究,提出以机械手示教手柄引导末端执行器对复杂运动轨迹进行预设计。
然后通过记录程序进行复杂轨迹的再实现,再对记录程序进行预修改,最终通过现有的程序进行设计编程完成复杂轨迹设计任务。
并利用MATLAB对轨迹进行仿真,对比其实际与计算的正确性。
最后本设计通过六自由度串联机械手实现平面文字轨迹,得出其设计的方式。
即首先利用示教手柄实现轨迹预设,记录预设轨迹程序,然后再对比程序初始化坐标进行手动编程。
关键词:六自由度机械手,笛卡尔坐标系,运动学方程,仿真,示教手柄ABSTRACTIn this paper, mechanical hand control the complex movement based on the series of six degrees of freedom manipulator so that the mechanical hand complete the complex trajectory of the movement control functions. In modern industrial welding, painting, and other aspects of the mandate can be used.This article based on the analysis of kinematics to study the trajectory control problems, use of inverse kinematics of the complex mode of tracking movement of the feasibility and practicality. At present, the six degrees of freedom manipulator complex movement has been relatively good control of the inverse are also some less freedom for the inverse of the manipulator algorithm. Solutions sought by inverse algorithm is not the only solution, it can reach more manipulator Pose, originally planned to complete most of the some of these solutions is not the most optimal, it is necessary to discuss their anti-the existence of solutions and uniqueness.Through the establishment of the manipulator Cartesian coordinates, derived manipulator is the inverse kinematics matrix equation and the study is the inverse kinematics of the equation solution on the basis of this establishment manipulator working space. And discuss their work space The flexibility and the possibility exists.So in another way to the six degrees of freedom series manipulator motion control the complex issues of research, to handle the machinery Shoushi guide for the implementation of the end of the complex pre-designed trajectory. Then track record of the complicated procedure to achieve, and then record the pre-amended eventual adoption of the existing procedures designed trajectory design of complex programming tasks. And using MATLAB simulation of the track, compared with its actual calculation is correct.The final design through six degrees of freedom series manipulator track to achieve flat text, draw their design approach. That is, first of all use of teaching handle achieve trajectory default the track record of default procedures, and then compared to manual procedures initialized coordinate programming.key words:Six degree-of-freedom manipulators,Cartesian coordinates, Equations of motion, Simulation, Demonstration handle.目录绪论 (1)课题研究背景和意义 (1)国内外研究状况 (2)六自由度机械手复杂运动控制的现实意义 (4)课题的提出 (5)本课题研究的主要内容 (5)串联机器人运动学 (7)机器人运动学方程的表示 (7)2.1.1 运动姿态和方向角 (8)2.1.2 运动位置和坐标 (9)2.1.3 连杆变换矩阵及其乘和 (12)机械手运动方程的求解 (15)2.2.1 欧拉变换解 (16)2.2.2 滚、仰、偏变换解 (20)2.2.3 球面变换解 (21)反解的存在性和唯一性 (23)2.3.1 反解的存在性和工作空间 (23)2.3.2 反解的唯一性和最优解 (24)2.3.3 求解方法 (25)六自由度机械手的平面复杂轨迹设计及运动学分析 (27)系统描述及机械手运动轨迹设计方式 (27)3.1.1 机器人技术参数一览表 (27)3.1.2 机器人控制系统软件的主界面 (27)3.1.3 机器人各部位和动作轴名称 (28)3.1.4 机械手运动轨迹设计方式 (29)平面复杂轨迹设计目的 (33)3.2.1“西”字的轨迹设计和分析 (33)3.2.2“南”字的轨迹设计和分析 (34)3.2.3机械手的起始位姿和末态位姿 (35)机械手轨迹设计中坐标系的建立 (35)平面轨迹设计的正运动学分析 (43)3.4.1平面轨迹设计的正运动学分析原理 (43)3.4.2 正运动学分析步骤及计算 (44)平面轨迹设计的逆运动学分析 (45)3.5.1 平面轨迹设计的逆运动学分析原理 (45)3.5.2.逆运动学分析步骤及计算 (46)设计实现过程和MATLAB仿真计算 (50)设计实现过程 (50)MATLAB仿真计算 (53)结论与展望 (57)结论 (57)展望 (58)致谢 (59)参考文献 (60)第一章绪论课题研究背景和意义在现代制造行业中,先进的制造技术不断的代替传统的加工方法和操作方式。