“慧鱼模型”三自由度机械手
慧鱼详解

2. 慧鱼机器人
2.1慧鱼创意教学组合模型简介
1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家ArthurFischer博士在1964年从其专利“六面拼接体”的基础上发明的。它是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
2.2.1机器人机构组成…………………………………………………………………………………………………………………….8
2.2.2机器人工作空间形式.................................................................................................................8
3.总结ﻩ17
4.参考文献18
1.机电一体化技术
1.1机电一体化技术的定义和内容
机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
三自由度机械手臂实验报告书
苏州大学2013级机械电子专业《机电一体化》实验报告书学生姓名:学号:指导教师:机电工程学院2013.111 实验目的培养学生设计、修改方案并掌握利用模型进行检验方案是否正确。
2 实验原理在进行机构或产品的创新设计时,往往很难判断方案的可行性,如果把全部方案的实物都直接加工出来,不仅费时费力,并且很多情况下设计的方案还需模型来进行实践检验,所以不能直接加工生产出实物。
现代的机械设计很多情况下是机电系统的设计,设计系统不仅包含了机械结构,还有动力、传动和控制部分,每个工作部分的设计都会影响整个系统的正常工作。
全面考虑这些问题来为每个设计方案制作相应的模型,无疑成本是高昂的,甚至由于研究目的、经费或时间的因素而变为不可能。
慧鱼创意组合模型由各种可相互拼接的零件组成,由于模型充分考虑了各种结构、动力、控制的组成因素,并设计了相应的模块,因此可以拼装成各种各样的模型,可以用于检验学生的机械结构设计和机械创新设计。
3 实验设备和工具慧鱼创意组合模型、电源、计算机、控制软件等。
4 实验准备工作熟悉慧鱼创意组合模型的拼装,领取模型。
5 实验方法与步骤1)根据教师给出的创新设计题目或范围,经过小组讨论后,拟定初步设计方案。
2)将初步设计方案交给指导教师审核。
3)审核通过后,按比例缩小结构尺寸,使该设计方案可由慧鱼创意组合模型进行拼装。
4)选择相应的模型组合包。
5)根据设计方案进行结构拼装。
6)安装控制部分和驱动部分。
7)确认连接无误后,上电运行。
8)必要时连接电脑接口板,编制程序,调试程序。
步骤为:先断开接口板、电脑的电源,连接电脑及接口板,接口板通电,电脑通电运行。
根据运行结果修改程序,直至模型运行达到设计要求。
9)运行正常后,先关电脑,再关接口板电源。
然后拆除模型,将模型各部件放回原存放位置。
6慧鱼创意组合模型的说明1)构件的分类慧鱼创意组合模型的构件可分成机械构件、电器构件、气动构件等几大部分。
机械构件主要包括:齿轮、连杆、链条、齿轮(圆柱直齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮)、齿轮轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱、铰链等。
基于ROBO PRO软件的三自由度机械手圆弧轨迹的研究
2 三 自 由 度 机 械 手 的 组 成 及 工 作 原 理
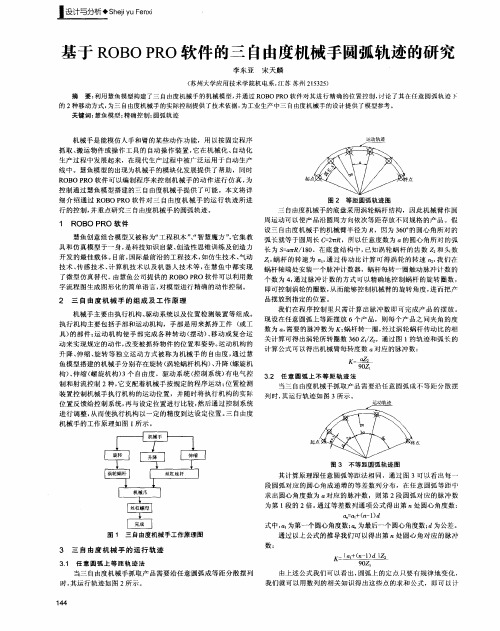
机械 手 主要 由执 行机 构 、 驱动 系 统 以及位 置检 测 装 置等 组 成 。 执行 机 构主 要 包括 手部 和运 动机 构 ,手 部是 用 来抓 持工 件 ( 工 或 具) 部件 ; 动 机 构使 手 部 完成 各 种 转 动 ( 动) 移 动 或 复合 运 的 运 摆 、 动来 实现 规 定 的动 作 , 改变被 抓 持物 件 的位 置和 姿势 。 动 机构 的 运 升 降 、 缩 、 转 等 独立 运 动 方 式被 称 为机 械 手 的 自由度 , 过 慧 伸 旋 通 鱼 模 型搭 建 的机 械 手分 别存 在 旋转 ( 轮蜗 杆机 构) 升 降 ( 涡 、 螺旋 机
量 sjue 坌 hi n e Fx y
基于 R B R O OP O软 件 的三 自由度机械 手圆弧轨迹 的研 究
李东亚 宋 天 麟
( 苏卅f 大学应用 技术学院机电系 , 苏 苏州 2 5 2 ) 江 13 5 摘 要: 利用慧鱼模型构建 了三 自由度 机械手 的机 械模型 , 并通 过 RO BOP O软件对其进 行精确 的位 置控制 , 论了其在任意 圆弧轨迹 R 讨
的 2种移 动方式, 为三 自由度机械手 的实际控 制提供 了技术依据 , 为工业生产中三 自由度机械手 的设计提 供了模型参考。
关键词 : 慧鱼模型; 精确控制; 圆弧轨迹
机 械 手是 能模 仿人 手 和臂 的某 些动 作 功 能 ,用 以按 固定 程 序 抓 取 、 运物 件 或 操作 工 具 的 自动 操 作装 置 , 搬 它在 机 械 化 、 自动化 生产 过程 中 发展起 来 ,在 现代 生产 过程 中被广 泛运 用 于 自动 生产
慧鱼实验_精品文档

慧鱼实验21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN软件一套接口电路板一块三实验原理:如图所示(见附图):为一三自由度机器人,能够实现搬运工件的作用,三自由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限一些置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1)对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2)调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1)实现夹取与放置的换位。
(2)改变大臂运动轨迹。
五实验思考题1、单个测试腰部可旋转,但整体测试时腰部却不按程序规定的运行,可能是什么原因2、大臂可以俯仰,但程序并不向下运行,会是什么原因3、夹钳不能开闭,会是什么原因4、如何实现运动轨迹投射到平面后为非矩形实验二移动机器人创意实验设计一实验目的:1、了解移动机器人的基本结构2、能够运用计算机编程,控制移动机器人的运动3、进行创意实验设计二实验器材:慧鱼移动机器人组合包一套慧鱼专用电池盒一个或专用电源一套PC机一台(要求:486、66以上,8M以上内存,空闲的LPT2口)LLWIN专用软件一套,(WINDOS3、1以上或WINDOWS95)接口电路板一块电缆若干三实验原理如图所地:为一跟踪光源移动机器人,能够跟踪光源而运动。
慧鱼模型工业机械手设计

摘要慧鱼创意组合模型主要有组合包、培训模型、工业模型三大系列,涵盖了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能,世界知名的德国西门子、德国宝马、美国IBM等一大批著名公司都采用慧鱼模型来论证生产流水线。
AbstractFischer creative combination model mainly include the combination packages, training mode , industrial model three series, covers the mechanical, pneumatic, automotive, electronics, control technology, energy technology and robot technology, and high and new disciplines, using industrial standard of the basic building blocks (mechanical components/electrical components, pneumatic components), supplemented by sensor, controller, actuator and software, using design and experimental analysis, can implement any reduction of technology process, more can realize industrial production and the simulation of large mechanical equipment operation for feasibility experiment teaching, scientific research and innovation and production lines provides a possible, world famous Germany Siemens, Germany's BMW, the United States a large number of famous companies such as IBM model is used to demonstrate the production assembly line.目录摘要 (I)1 绪论 (1)1.1慧鱼创意模型实验介绍 (1)1.2机械手的组成和分类 (4)1.2.1 机械手的组成 (4)1.2.2 机械手的分类 (7)1.3机器人领域的未来发展趋势 (8)1.4课题的提出及主要任务 (9)1.4.1 课题的提出 (9)1.4.2 课题的主要任务 (10)2 机械手的设计方案 (11)2.1工作原理 (11)2.1主要机构构件的介绍 (12)2.2.ROBOP RO的介绍 (14)2.3如何编程 (15)3组装过程 (23)6 结论 (26)致谢 (28)1 绪论1.1 慧鱼创意模型实验介绍1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
3个自由度机械手设计
3个自由度机械手设计机械手的结构有很多种,其中,以机械手的自由度作为分类标准可以分为三类:二自由度机械手、三自由度机械手和四自由度机械手。
本文主要介绍三自由度机械手的设计。
1. 三自由度机械手简介三自由度机械手指的是机械手自由度为3,可以完成三个轴向运动的机械手。
人们通常使用三自由度机械手进行精确的三维组装任务,如电子产品的组装等。
三自由度机械手通常由两个平移轴和一个旋转轴组成。
其中,旋转轴是沿垂直于平面运动的。
机械手的三个自由度分别称为:Base、Shoulder和Elbow。
2. 三自由度机械手的设计设计三自由度机械手的第一步是确定机械手的尺寸和负载能力。
然后,需要选择机械手所需的驱动器类型,如直流电机或步进电机等。
接下来,需要确定每个自由度的运动范围,包括最大旋转角度和各轴的工作范围。
在确定机械手的基本参数后,接下来需要选择机械手的结构类型。
目前,常见的三自由度机械手结构包括球丝机械手、气动机械手和升降机械手等。
其中,球丝机械手具有高精度和高信度的特点,但它的制造成本较高;气动机械手主要用于一些要求速度较快的场合,但不太适合精度要求较高的组装任务;升降机械手适用于较小的工作空间。
在选择机械手的结构类型后,需要设计机械手的关节和连接杆。
机械手的关节通常采用旋转关节和平移关节,连接杆和支撑结构需要考虑机械手的负载和刚度要求。
3. 三自由度机械手的应用三自由度机械手具有广泛的应用前景。
它们可以用于精密组装、准确定位和定点操作等任务。
下面主要从以下几个方面介绍三自由度机械手的应用。
3.1 电子产品组装三自由度机械手可以快速、准确地组装电子产品,如手机、平板电脑等。
机器操作准确,不会对电子产品产生损害。
3.2 制造业三自由度机械手可以帮助制造业生产高精度、高精度零件。
它们可以在离线或在线环境中自动操作,从而提高生产效率和生产效果。
3.3 工业制造三自由度机械手可以用于支持大规模制造。
在工业制造中,机械手可以执行多个任务,如点对点的移动、送货、装载等。
慧鱼实验
21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代?微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN 软件一套接口电路板一块三实验原理:如图所示(见附图): 为一三自由度机器人,能够实现搬运工件的作用,三自* 由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实* 现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部* 旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用* 于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转* 的次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限* 位置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1) 对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2) 调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1) 实现夹取与放置的换位。
(2) 改变大臂运动轨迹。
三自由度机械手毕业设计
图2.3.1机械手基座的旋转运动
电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示
图2.3.1机械手的前后运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动
图2.3.2机械手的上下运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动
4、机械手爪的夹紧与放松运动
图2.3.3通过上面的电机控制开夹
图2.3.4机械手夹紧与放松运动
电机输出动能,经减速箱调节速度并传递到传动轴,不同轴线的各传动杆通过万向铰链进行连接并传递动力,最近将杆件的旋转运动通过螺旋机构转化为手爪的夹紧或松开运动。
三自由度机械手
一、概述
1.1机电一体化技术
1.1.1机电一体化技术的定义和内容
机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。它由各种型号和规格的零件构成,类似于积木。零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件: 连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗 杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器 人和气动机器人。
2010慧鱼培训模型及工业模型介绍
2010 慧鱼培训模型和工业模型目录2006慧鱼创意组合模型培训模型介绍 (3)三自由度机械手3-D-Robot (505005) (4)带传送带的冲床Punching Machine with Conveyor Belt (505006) (5)双工作台操作流水线Indexed line with 2 Machining Stations (505007) (6)气动加工中心Pneumatic Processing Center (505008) (7)2006 德国慧鱼创意组合模型工业模型介绍 (8)包裹翻转模型Parcel turnover model (502030) (8)升降台Lifting table (502029) (10)带三轴门架的传送与分类流水线Transport and sorting line with 3-axis-portal(502027) (11)柔性加工流水线Flexible process line (502025) (12)带三轴门架的柔性加工流水线Flexible process line with 3-axis-portal (502024) (13)三轴门架3-axis-portal (502023) (14)加工中心Production unit with shuttle (502021) (15)加工单元SIDAC配套Processing units SIDAC matching (502018) (16)冲压机西门子兼容Ram machines SIEMENS compatible (502017) (17)装配流水线西门子兼容Assembly line SIEMENS compatible (502016) (18)立体仓库Midule high level storage warehouse (502015) (19)洗车线Car wash line (502014) (20)传送与分类流水线Transport and sorting line (502013) (22)五自由度机械手5-D-robot (502012) (23)可翻转传输带,旋转台和滑台Conveyor Belts, Turntable and Roll Line (502009) (24)气动分选机Pneumatic Picking (502007) (25)吸盘搬运机Converter Suck Gripper (502006) (26)小型立体仓库Compact -High-Level-Storage-Warehouse (502005) (27)小型洗车线Compact -Car Wash Line (502004) (28)小型柔性加工线Compact -Flexible Process Line with 2 Machine Tools (502003) (29)小型传送分类流水线Compact -Transport and Sorting Line (502002) (30)小型传输带Compact -Conveyor Belt (502001) (31)综合仓储加工系统Integrated Storage Processing System (502037) (32)三自由度机械手3-D-Robot (502036) (33)双工作台操作流水线Indexed line with 2 Machining Stations (502034) (34)焊接加工流水线Welding Processing Line (502032) (35)堆垛流水线Stow Processing Line (502031) (36)2010 慧鱼创意组合模型培训模型介绍----慧鱼创意组合模型创新教育的理想学具1964年,慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为职业院校创新教育和创新实验提供了最佳的载体。
基于慧鱼模型移动教学机械手的设计_李志斌
图 2 移动底盘
2. 1. 2 机械手的设计 工业产品中机械手通常采用气动控制球型坐
图 3 移动教学机械手
在主控 电路板 硬件设 计中, 采用 了 ATM EL 公司的芯片, 理论上可以达到 32 的电机位置控 制. 系统工作时, 通过多个限位开关来防止电机位 置失控, 操作员通过自编控制软件的实时指挥运 动操作系统来操纵机械手的执行部件, 以改变机 械手的运行状态.
3 教学机械手控制软件的设计
2. 1. 1 移动底盘的设计 移动行进底盘采用轮式机构, 双后轮直流电
机驱动, 差速实现装置转向. 结构设计中考虑到其 本身要承担的负载较重, 基于分散平衡负载的思 想, 后置接口板, 前移机械手.
底盘纵轴通过拼接伸长结构块, 同时考虑控 制操作的简易性, 前轮采用万向轮轴结构, 无独立 电机驱动.
2. 2 教学机械手主控电路板的设计
由于整个系统实现的是多电机实时控制, 其 控制采用分层控制结构, 分两级对机械手进行控 制. 上位机作为主控型计算机, 主要用于接受操作 指令、协调电机运动和控制运动轨迹. 下位机是由 我们自主设计的 32路多电机控制器为核心的控 制系统, 如图 4所示.
图 4 移动教学机 械手 32 主控制器流程
法及数字低通滤波器 的优化 设计 [ J] . 中国 电机 工程学 报, 2007, 27( 34 ) : 96-101. [ 5 ] 王群, 姚为正, 王兆安. 低通滤波器对谐波检测电路的影 响 [ J]. 西安交通大学学报, 1999, ( 4) : 33-40. [ 6 ] 王群, 姚为正, 王兆安. 高通和低通滤波器对谐波检测电 路检测效果 的影 响研 究 [ J] . 电 工 技术 学报, 1999, 14 ( 5) : 22-26. [ 7 ] 邝乃兴, 钱照明, 童立青, 等. 一种高性能的谐波检测数 字低通滤波器 [ J] . 电力系统自动化, 2006, 30( 20) : 64-
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖北理工学院毕业设计(论文)“慧鱼模型”三自由度机械手设计小册学院:机电工程学院班级:机械设计与制造指导老师:姓名:学号:201030120130湖北理工学院毕业设计(论文)一、概述 ............................................................11.1机电一体化技术 ...................................................11.1.1机电一体化技术的定义和内容 (1)1.1.2机电一体化系统组成 (1)1.2. 慧鱼机器人 .....................................................21.2.1慧鱼创意教学组合模型简介 (2)二、机器人的组成 .....................................................2.1组成构件 .........................................................32.2慧鱼机器人分析 ...................................................62.2.1机器人机构组成 (6)2.2.2主要成分构成及功能 (7)2.3. 机器人的工作空间形式 ............................................92.4机器人的机械运动形态和变换控制 ..................................112.5机器人的位移、速度、方向的控制方法 (13)湖北理工学院毕业设计(论文)一、概述1.1机电一体化技术1.1.1机电一体化技术的定义和内容机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
1.1.2机电一体化系统组成1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着支撑系统中其他功能单元、传递运动和动力的作用。
2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是检测机电一体化系统工作过程中本身和外界环境有关参量的变化,并将信息传递给电子控制单元,电子控制单元根据检查到的信息向执行器发出相应的控制。
3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器的检测信号和外部输入命令进行集中、存储、计算、分析,根据信息处理结果,按照一定的程度和节奏发出相应的指令,控制整个系统有目的地进行。
4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。
执行器是运动部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。
5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械系统提供能量和动力使系统正常运行。
提供能量的方式包括电能、气能和液压能。
毕业设计(论文)湖北理工学院慧鱼机器人1.2.慧鱼创意教学组合模型简介1.2.11964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
它是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。
它由各种型号和规格的零件构成,类似于积木。
零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件:连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。
由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。
技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。
机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器人和气动机器人。
在慧鱼实验过程中,通过对各类模型的认识和组装,从而可以熟悉并掌握各类机械设备和自动化装置的常用结构和工作原理。
在模型的组建中,将运用到机械加工、气动技术、电子电路和软件编程等知识,从而加深了对这些相关课程的理解。
另外通过慧鱼模型的搭建和组装也培养了实际动手的能力、解决实际问题的能力和创新设计的能力湖北理工学院毕业设计(论文)二、机器人的组成2.1组成构件湖北理工学院毕业设计(论文)湖北理工学院毕业设计(论文)湖北理工学院毕业设计(论文)2.2慧鱼机器人分析此次机电一体化创新设计项目,我们所完成的是慧鱼工业机器人中的三自由度机械手,它能够通过智能控制接口盒的编程控制实现三个自由度方向(旋转、水平、垂直)的夹取或放置物品,因此操作范围大,灵活性好。
2.2.1机器人机构组成如图2.1所示,该机器人为三自由度机械手,其机械手爪有夹紧和松开物件的功能,由三个电机驱动三个自由度的运动,由一个电机控制手爪的夹紧和松开。
可实现整体的旋转、水平、垂直运动及手爪的夹紧、松开运动。
该机械人可通过PC对控制芯片进行编程,从而输出控制信号到各电机,驱动机械人的运动方向或行程,从而夹取或放置物件。
图2.1 机械手机构组成湖北理工学院毕业设计(论文)2.2.2主要成分构成及功能1、机械手基座旋转运动图2.2.1机械手基座旋转运动UG模型图该运动主要构件有电动机、减速箱、蜗杆、齿轮。
2.机械手水平运动图2.2.2机械手水平运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、导杆。
湖北理工学院毕业设计(论文)3、机械手垂直运动图2.2.3机械手垂直运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、连杆机构4、机械手爪夹紧与松开运动图2.2.4机械手爪夹紧与松开运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、传动轴、万向铰链、螺旋传动块、连杆机构。
湖北理工学院毕业设计(论文)2.3. 机器人的工作空间形式该机器人的工作空间形式主要有三个自由度的运动和机械手爪的夹松运动。
1、自由度一:机械手基座的旋转运动,如图2.3.1所示图2.3.1 机械手基座的旋转运动电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示图2.3.1机械手的前后运动湖北理工学院毕业设计(论文)电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动图2.3.2机械手的上下运动电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动4、机械手爪的夹紧与放松运动图2.3.3通过上面的电机控制开夹毕业设计(论文)湖北理工学院2.3.4机械手夹紧与放松运动图不同轴线的各传动杆通过经减速箱调节速度并传递到传动轴,电机输出动能,最近将杆件的旋转运动通过螺旋机构转化为手爪的万向铰链进行连接并传递动力,夹紧或松开运动。
2.4机器人的机械运动形态和变换控制 1、机械手基座的旋转运动如下图所示,传动方式为:控制信号—电机—减速箱—圆柱蜗杆传动—基座减速箱电动机机械手基座的旋转运动机构简图图2.4.1毕业设计(论文)湖北理工学院、机械手的水平运如下图所示,传动方式为:控制信号—电机—减速箱—螺旋机构—机架电动减速箱2.4.机械手的前后运动机构简、机械手的垂直运控制信号—电机—减速箱—螺旋机构—连杆机构—机传动方式为如下图所示,电动机减速箱机械手的垂直运动机构简图图2.4.3毕业设计(论文)湖北理工学院、机械手爪夹紧与放松运控制信号—电机—减速箱—传动轴—万向铰链—传动如下图所示传动方式为—螺旋机构—连杆机构—手爪夹紧气电动2.4.机械手爪夹紧与放松运动机构简2.5机器人的位移、速度、方向的控制方法的程序编制与载入,将控制信号该机器人整体与控制芯片盒连接,并通过PC输送到电机。
其中速度控制信号将控制电机的速度从而实现机器人的运动速度转为了并且时间控制信号将于速度控制信号配合实现机器人的运动位移量可调。
变,以限制运动的极限防止超出行程,各主要机械运动构件附近安装有限位行程开关,位置,同时也是运动的起始位置;当各运动构件运动碰到两边的限位行程开关后,机器人将停止运动。
1、机械手基座的旋转运动位移速度控制动力源(电机)接收到控制芯片的位移速度控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
动力输出轴通过蜗轮机构 0°~360°。
将动力转换为基座齿轮的转动。
躯干的理论旋转范围为机械手的水平运动位移速度控制 2.动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
然后动力轴的转动通过螺旋机构转化为机架的水平前后运动。
毕业设计(论文)湖北理工学院3、机械手的垂直运动位移速度控制动力源(电机)接收到智能控制接口盒的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
减速箱输出动力到最后通过连杆机构转化为机械再通过螺旋机构转化为机架的前后水平运动,丝杆,臂的上下摆动。
4、机械手爪夹紧与放松运动位移速度控制动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较减速箱输出动力到传动轴,调节电机转速到较低的合适量。
高,通过减速箱的作用,各传动轴因轴线不在同一水平线上故需通过万向铰链连接,最后传递到螺旋机构,带动连杆机构从而形成机械手爪的夹紧与松开运动。