船舶导航雷达 PPT
合集下载
《航海学—天文、地文、仪器》教学课件—11船舶导航雷达

➢ 平均功率是指在脉冲重复周期内 输出功率的平均值,因此,数值 很小。
雷达基本组成及各部分作用
天线:
➢ 雷达天线是一种方向性很 强的天线。它把发射机经 波导馈线送来的发射脉冲 的能量聚成细束朝一个方 向发射出去,同时,也只 接收从该方向的物标反射 的回波,并再经波导馈线 送入接收机。
雷达基本组成及各部分作用
接收机:
➢ 由于从天线送来的超高频 回波信号十分微弱,因此, 必须将回波信号放大近百 万倍才行。雷达中的接收 机均采用超外差式接收机, 它把回波信号先进行变 频——变成中频回波信号, 然后再放大、检波、再放 大,变成显示器可显示的 视频回波信号。
测距原理
显示器:
➢ 船用雷达的显示器是一种平面位置显示器。 ➢ 传统的显示器在触发脉冲的控制下产生一个锯齿电
流,在屏上形成一条径向亮线(即距离扫描线), 用来计时、计算物标回波的距离,同时,这条扫描 线由方位扫描系统带动随天线同步旋转。 ➢ 现代的显示器直接把信号数字化成VGA格式信号, 以便外接通用显示器。显示器配有测量物标方位、 距离的装置,以测量物标的方位和距离。
触发脉冲产生器
触发脉冲产生器作用:
➢ 每隔一定时间产生一个触发脉冲,分别送到发射机、 接收机和显示器,使它们同步工作。
脉冲重复频率和周期:
➢ 每秒钟内脉冲重复出现的次数,称为脉冲重复频率。 ➢ 相邻两个脉冲间的时间间隔称为脉冲重复周期。 ➢ 触发脉冲的重复周期应与显示器的测距范围(量程)
相对应。 ➢ 远量程对应的脉冲重复周期长,近量程对应的脉冲
雷达基本组成及各部分作用
雷达基本组成及各部分作用
触发电路:
➢ 其任务是每隔一定时间 (例如1000μs)产生一 个作用时间很短的尖脉冲 (触发脉冲),分别送到 发射机、接收机和显示器, 使它们同步工作。
雷达基本组成及各部分作用
天线:
➢ 雷达天线是一种方向性很 强的天线。它把发射机经 波导馈线送来的发射脉冲 的能量聚成细束朝一个方 向发射出去,同时,也只 接收从该方向的物标反射 的回波,并再经波导馈线 送入接收机。
雷达基本组成及各部分作用
接收机:
➢ 由于从天线送来的超高频 回波信号十分微弱,因此, 必须将回波信号放大近百 万倍才行。雷达中的接收 机均采用超外差式接收机, 它把回波信号先进行变 频——变成中频回波信号, 然后再放大、检波、再放 大,变成显示器可显示的 视频回波信号。
测距原理
显示器:
➢ 船用雷达的显示器是一种平面位置显示器。 ➢ 传统的显示器在触发脉冲的控制下产生一个锯齿电
流,在屏上形成一条径向亮线(即距离扫描线), 用来计时、计算物标回波的距离,同时,这条扫描 线由方位扫描系统带动随天线同步旋转。 ➢ 现代的显示器直接把信号数字化成VGA格式信号, 以便外接通用显示器。显示器配有测量物标方位、 距离的装置,以测量物标的方位和距离。
触发脉冲产生器
触发脉冲产生器作用:
➢ 每隔一定时间产生一个触发脉冲,分别送到发射机、 接收机和显示器,使它们同步工作。
脉冲重复频率和周期:
➢ 每秒钟内脉冲重复出现的次数,称为脉冲重复频率。 ➢ 相邻两个脉冲间的时间间隔称为脉冲重复周期。 ➢ 触发脉冲的重复周期应与显示器的测距范围(量程)
相对应。 ➢ 远量程对应的脉冲重复周期长,近量程对应的脉冲
雷达基本组成及各部分作用
雷达基本组成及各部分作用
触发电路:
➢ 其任务是每隔一定时间 (例如1000μs)产生一 个作用时间很短的尖脉冲 (触发脉冲),分别送到 发射机、接收机和显示器, 使它们同步工作。
雷达系统原理PPT课件
旁瓣旁瓣电平为主瓣电平与最大旁瓣电平之差脉冲波束宽度脉冲宽度是指在主瓣中辐射功率密度为最大辐射功率密度3db的一半的角也被称为半值宽度雷达无线电波特性雷达的无线电波略沿地表方向传播主要视线
雷达系统原理
什么是雷达系统?
• 雷达是从天线发射称为微波的甚高频无线电波的导航设备。发射 的无线电波经过 目标(如其他船,浮标,小岛等)反射回来,并 通过相同的天线接受后转换为电 信号。再将这些电信号发送给显 示单元进行显示。雷达使在夜晚或大雾的情况下 发现视线以外的 目标成为可能,并可以使船避免一些潜在的危险。 由于天线发射 的同时在旋转,这样就使本船周边的情况便一目了然。 雷达发射 的微波信号被称为脉冲信号,发射和接收这些信号是交替进行的。 一次 360 度的旋转就有上千的脉冲信号被发射和接收。
感谢亲观看此幻灯片,此课件部分内容来源于网络, 如有侵权请及时联系我们删除,谢谢配合!
关于 SART雷达应答器
• 根据 GMDSS(全球遇险与安全系统)要求,IMO/SOLAS 类型的 船必须配备 SART。当船遇险时,SART 可以自动发出信号,所以 其他船或飞机就可以确定 遇险船的位置。若本船配备了波段的雷 达,并且 8 英里内有船遇险,SART 可以 指引雷达回波到遇险船。 该信号包括了 12 扫频,并在 9.2 到 9.5GHz 的频段传输。 根据距 离的不同,SART 具有 2 种扫频时间,由慢(7.5μs)到快(0.4μs) 扫描或反 之亦然。当接收到该信号时,屏幕上出现一条总长为 0.64 海里被 12 个点平均的 线。最近的 SART 的光点指示遇险船 的位置。当本船接近 SART 1 海里以内时, 雷达上显示快速闪烁 的扫描信号,并有一根单薄的线连接 12 个光点。
弱反射目标
• 目标反射的回波强度不仅取决于与目标间的距离,目标的高度或 尺寸,还要取决 于目标的材料和特性。具有低发射或入射角的目 标,如 FRP(纤维增强复合材料) 船和木制船发射的都不好。所以, 必须注意 FRP 船,木船或沙,沙洲,泥礁等 物体都是弱反射目 标。 由于与海岸线的距离等,本船在雷达图像上看起来比实际的 海岸线要远,当船周 围有弱反射目标时,应更加谨慎。
雷达系统原理
什么是雷达系统?
• 雷达是从天线发射称为微波的甚高频无线电波的导航设备。发射 的无线电波经过 目标(如其他船,浮标,小岛等)反射回来,并 通过相同的天线接受后转换为电 信号。再将这些电信号发送给显 示单元进行显示。雷达使在夜晚或大雾的情况下 发现视线以外的 目标成为可能,并可以使船避免一些潜在的危险。 由于天线发射 的同时在旋转,这样就使本船周边的情况便一目了然。 雷达发射 的微波信号被称为脉冲信号,发射和接收这些信号是交替进行的。 一次 360 度的旋转就有上千的脉冲信号被发射和接收。
感谢亲观看此幻灯片,此课件部分内容来源于网络, 如有侵权请及时联系我们删除,谢谢配合!
关于 SART雷达应答器
• 根据 GMDSS(全球遇险与安全系统)要求,IMO/SOLAS 类型的 船必须配备 SART。当船遇险时,SART 可以自动发出信号,所以 其他船或飞机就可以确定 遇险船的位置。若本船配备了波段的雷 达,并且 8 英里内有船遇险,SART 可以 指引雷达回波到遇险船。 该信号包括了 12 扫频,并在 9.2 到 9.5GHz 的频段传输。 根据距 离的不同,SART 具有 2 种扫频时间,由慢(7.5μs)到快(0.4μs) 扫描或反 之亦然。当接收到该信号时,屏幕上出现一条总长为 0.64 海里被 12 个点平均的 线。最近的 SART 的光点指示遇险船 的位置。当本船接近 SART 1 海里以内时, 雷达上显示快速闪烁 的扫描信号,并有一根单薄的线连接 12 个光点。
弱反射目标
• 目标反射的回波强度不仅取决于与目标间的距离,目标的高度或 尺寸,还要取决 于目标的材料和特性。具有低发射或入射角的目 标,如 FRP(纤维增强复合材料) 船和木制船发射的都不好。所以, 必须注意 FRP 船,木船或沙,沙洲,泥礁等 物体都是弱反射目 标。 由于与海岸线的距离等,本船在雷达图像上看起来比实际的 海岸线要远,当船周 围有弱反射目标时,应更加谨慎。
《雷达定位与导航》课件
电扫描
利用相位控制天线阵列,通过接收信 号的相位差来确定方向角,精度较高 但技术复杂。
速度测量
多普勒频移法
利用多普勒效应原理,通过测量发射信号与接收信号的频率差来计算相对速度 ,适用于动态目标检测。
跟踪法
通过雷达系统对目标进行连续跟踪,根据目标位置的变化来计算速度,适用于 稳定跟踪场景。
04
导航雷达技术
特点
高灵敏度、低噪声、动态 范围大。
天线
功能
定向发射和接收电磁波。
类型
抛物面型、八木天线、缝隙天线等。
特点
方向性强、增益高、抗干扰能力强。
信号处理系统
功能
对接收到的信号进行加工处理 ,提取有用的信息。
组成
信号处理器、数据处理器等部 分。
技术
脉冲压缩技术、动目标检测技 术等。
特点
处理速度快、精度高、稳定性 好。
雷达定位与导航系统主要由雷达、数据处理设备和终端显示设备等组成。雷达是系统的核心,负责发 射和接收电磁波;数据处理设备负责对接收到的回波进行处理和计算,提取出目标的位置信息;终端 显示设备则将处理后的数据显示出来,供用户使用。
雷达定位与导航的原理
雷达定位与导航的基本原理是利用电磁波传播的特性。雷达发射的电磁波在传播过程中遇到目标后会被反射回来,反射回来 的电磁波会被雷达接收并处理。通过测量电磁波的传播时间、相位变化等信息,可以计算出目标相对于雷达的距离、方位和 高度等参数,从而确定目标的位置和运动轨迹。
总结词
利用陀螺仪和加速度计等惯性传感器来测量物体运动过程中的加速度和角速度,并通过 积分运算来推算物体位置和姿态的方法。
详细描述
惯性导航是一种自主的导航方式,它不依赖于外部信息源,而是通过测量自身的运动状 态来推算位置和姿态。惯性导航系统通常由陀螺仪和加速度计等传感器组成,可以提供 高精度的角速度和加速度信息,并通过积分运算得到位置和姿态信息。这种导航方式常
利用相位控制天线阵列,通过接收信 号的相位差来确定方向角,精度较高 但技术复杂。
速度测量
多普勒频移法
利用多普勒效应原理,通过测量发射信号与接收信号的频率差来计算相对速度 ,适用于动态目标检测。
跟踪法
通过雷达系统对目标进行连续跟踪,根据目标位置的变化来计算速度,适用于 稳定跟踪场景。
04
导航雷达技术
特点
高灵敏度、低噪声、动态 范围大。
天线
功能
定向发射和接收电磁波。
类型
抛物面型、八木天线、缝隙天线等。
特点
方向性强、增益高、抗干扰能力强。
信号处理系统
功能
对接收到的信号进行加工处理 ,提取有用的信息。
组成
信号处理器、数据处理器等部 分。
技术
脉冲压缩技术、动目标检测技 术等。
特点
处理速度快、精度高、稳定性 好。
雷达定位与导航系统主要由雷达、数据处理设备和终端显示设备等组成。雷达是系统的核心,负责发 射和接收电磁波;数据处理设备负责对接收到的回波进行处理和计算,提取出目标的位置信息;终端 显示设备则将处理后的数据显示出来,供用户使用。
雷达定位与导航的原理
雷达定位与导航的基本原理是利用电磁波传播的特性。雷达发射的电磁波在传播过程中遇到目标后会被反射回来,反射回来 的电磁波会被雷达接收并处理。通过测量电磁波的传播时间、相位变化等信息,可以计算出目标相对于雷达的距离、方位和 高度等参数,从而确定目标的位置和运动轨迹。
总结词
利用陀螺仪和加速度计等惯性传感器来测量物体运动过程中的加速度和角速度,并通过 积分运算来推算物体位置和姿态的方法。
详细描述
惯性导航是一种自主的导航方式,它不依赖于外部信息源,而是通过测量自身的运动状 态来推算位置和姿态。惯性导航系统通常由陀螺仪和加速度计等传感器组成,可以提供 高精度的角速度和加速度信息,并通过积分运算得到位置和姿态信息。这种导航方式常
《雷达定位与导航》课件

3 方位测量
雷达利用天线的旋转或 相控阵技术来确定目标 的方位角。
雷达定位的应用领域
军事
雷达在军事领域中用于目标探测、目标跟踪 和导弹制导等方面。
航空
雷达在航空领域中用于飞行管制、地面导航 和防撞系统等。
气象
雷达可以检测大气中的降水、雷暴等天气现 象,用于气象预报和监测。
海洋
雷达可用于海洋中的船舶定位、海上目标探 测和导航等。
雷达导航的应用领域
航天
雷达导航在航天领域中用于卫星定位和航天 器导航。
航空
雷达导航在航空领域中用于飞行导航和空中 交通管制。
航海
雷达导航在航海领域中用于船舶定位和海上 导航。
陆地
雷达导航在陆地领域中用于车辆导航和位置 服务等。
雷达导航系统的组成
1 定位器件
包括雷达天线、传感器 和接系统通过卫星和地面设备共同工作,实现全球范围的导航和定位功 能。
卫星导航系统的发展历程
1
GPS系统
美国开发的全球定位系统,成为卫星
GLONASS系统
2
导航的先驱。
俄罗斯开发的全球卫星导航系统。
3
北斗系统
中国开发的全球卫星导航系统。
雷达信号处理器
用于对雷达信号进行处理和分 析的装置。
雷达信号处理技术概述
雷达信号处理技术包括目标检测、滤波、参数估计和图像重建等方面,旨在 提取目标信息并实现目标定位与跟踪。
雷达信号处理的主要方法
1
雷达脉冲压缩
通过信号处理方法,压缩脉冲雷达接收信号,提高距离和速度分辨率。
2
自适应波束形成
根据环境和目标情况,实时调整雷达天线的发射和接收模式,实现波束的优化。
雷达定位的分类
船用雷达与定位与导航
实时监测船只位置、航速、航向等信息,确保船舶安 全航行。
雷达导航系统
探测障碍物
利用雷达发射的电磁波探测周围 障碍物,提供实时、准确的距离
和方位信息。
气象监测
雷达系统可以监测海洋气象信息, 如风向、风速、海浪等,为航行提 供参考。
自动避障
通过雷达探测周围障碍物,自动调 整航向和航速,避免碰撞事故。
惯性导航系统
船用雷达的应用场景
船用雷达广泛应用于船舶导航、避碰、气象观测和海洋调查等领域。在船舶导航中,雷达可以帮助船员探测周围的目标,避 免碰撞事故的发生。
在避碰中,雷达可以实时监测周围船舶的动态,为船舶提供安全航行的信息。在气象观测中,雷达可以探测降雨、风向和风 速等信息,为航行提供气象保障。在海洋调查中,雷达可以用于探测海底地形、水深和流速等信息,为海洋科学研究提供数 据支持。
标准化和互操作性
为了促进集成系统的广泛应用和发展,需要制定统一的标准和规范, 提高不同设备和系统之间的互操作性和兼容性。
05 安全与法规考虑
安全与法规考虑 国际海上避碰规则
雷达设备的合规性
船用雷达设备必须符合国际电工委员会(IEC)和国际海事组织(IMO)的相关标准和规定,以确保其性 能、安全性和可靠性。在使用船用雷达设备时,应确保其符合相关法规和标准的要求,并定期进行维护和 校准。
船用雷达与定位与导航
目录
• 船用雷达系统 • 定位系统 • 导航系统 • 船用雷达与定位与导航的集成应用 • 安全与法规考虑
01 船用雷达系统
船用雷达工作原理
船用雷达通过发射电磁波并接收反射 回来的信号来探测目标,根据目标距 离、方位和高度等信息,形成雷达图 像。
雷达波在传播过程中会受到气象、海 浪等因素的干扰,因此需要对接收到 的信号进行滤波、放大和去噪等处理 ,以提高探测精度。
雷达导航系统
探测障碍物
利用雷达发射的电磁波探测周围 障碍物,提供实时、准确的距离
和方位信息。
气象监测
雷达系统可以监测海洋气象信息, 如风向、风速、海浪等,为航行提 供参考。
自动避障
通过雷达探测周围障碍物,自动调 整航向和航速,避免碰撞事故。
惯性导航系统
船用雷达的应用场景
船用雷达广泛应用于船舶导航、避碰、气象观测和海洋调查等领域。在船舶导航中,雷达可以帮助船员探测周围的目标,避 免碰撞事故的发生。
在避碰中,雷达可以实时监测周围船舶的动态,为船舶提供安全航行的信息。在气象观测中,雷达可以探测降雨、风向和风 速等信息,为航行提供气象保障。在海洋调查中,雷达可以用于探测海底地形、水深和流速等信息,为海洋科学研究提供数 据支持。
标准化和互操作性
为了促进集成系统的广泛应用和发展,需要制定统一的标准和规范, 提高不同设备和系统之间的互操作性和兼容性。
05 安全与法规考虑
安全与法规考虑 国际海上避碰规则
雷达设备的合规性
船用雷达设备必须符合国际电工委员会(IEC)和国际海事组织(IMO)的相关标准和规定,以确保其性 能、安全性和可靠性。在使用船用雷达设备时,应确保其符合相关法规和标准的要求,并定期进行维护和 校准。
船用雷达与定位与导航
目录
• 船用雷达系统 • 定位系统 • 导航系统 • 船用雷达与定位与导航的集成应用 • 安全与法规考虑
01 船用雷达系统
船用雷达工作原理
船用雷达通过发射电磁波并接收反射 回来的信号来探测目标,根据目标距 离、方位和高度等信息,形成雷达图 像。
雷达波在传播过程中会受到气象、海 浪等因素的干扰,因此需要对接收到 的信号进行滤波、放大和去噪等处理 ,以提高探测精度。
船用雷达详细介绍演示幻灯片
1. 基本原理:
基本雷达 a 天线
方位量化
d PPI /
b 定时
光栅扫描
收发机
转换
c 视频量化 e
扫描信号 光栅雷达信号 发生器
直角坐标 数据内存
a — 原始方位和船首信号;b — 触发脉冲;c — 原始视频;光雷栅达扫描 d — 数字方位信号;e— 数字视频
①将原始视频杂波抑制,然后与天线方位信号、船艏信号量化 ②进行坐标转换,产生光栅扫描信号
防管内打火
老练方法:
1.只加灯丝电压工作半小时以上 2.加较低的高压工作一段时间(时间视具体情况定) 3.如无打火现象,逐渐加高压到正常值
17
第一节 雷达发射机(Transmitter)
四、正常工作标志
通过收发箱内的表头或显示器上的磁控管电流指示判断
有——正常;无——不正常
五、性能检测
1.磁控管工作是否正常
2、二单元雷达: 天线收发机、显示器、中频电源
10
三、雷达传感器与 IBS
现代雷达 IBS的重要组成部分 定位、导航、避碰
主要传感器
雷达 罗经 计程仪 GNSS AIS ECDIS
11
第二章 船用雷达设备
12
第一节 雷达发射机(Transmitter)
一、组成部分及作用
至显示器 至接收机
脉冲调制器
触发脉冲 产生器
予调制器
调制器
发射机
至天线
磁控管
特高压 调制器
磁控管
低压 电源 来自电源
发 射 开 关
延 时 开 关
门 特高压 开 电源 关
雷达发射机
收发 开关
门开关 至接收机
触发脉冲产予调制器 生器
船舶导航雷达 ppt课件
雷达图像的特点:
秦 皇 岛 航 海 学 院 由于雷达设备自身的性能、大气传播的条件、目标
的反射能力以及周围环境的变化都会影响雷达图像的形 成与质量,使雷达探测到的目标回波图像与真实目标相
Q H D H H X Y 比,可能会有很大的变形,比如:
► 雷达回波图像类似目标迎问天线面的垂直投影; ► 雷达只能探测目标的前沿,后沿被遮挡的部分无法
秦 皇 岛 航 海 学 院 船舶等对船舶导航
避碰安全航行有用 的各种回波之外, 还出无各法种避驾免驶员地显不示希望看到的回波,如海浪、雨雪、同频干扰、云雾、噪声、假 回波等。一个专业的雷达观测者,应能够在各种杂波干扰和复杂屏幕背景中分 辨出有用回波,引导船舶安全航行。
第一节 雷达目标探测与显示基本原理
Q H D H H X Y 成像、识别、检测、定位和跟踪。 电磁波具有似光性,在地球表面近似以光速直线 传播,遇到物体后会被反射回去。
Q H D H H X Y 英文:Radar---Radio Detection And
Ranging,即无线电探测与测距。
秦 皇 岛 航 海 学 院 ★ 应用于船舶导航的雷达成为船舶导航雷达
后
D
H
H
X
Y
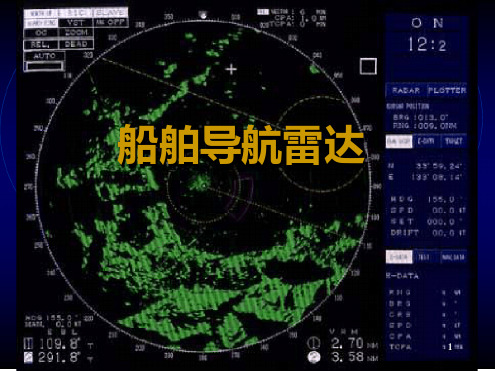
C图为雷达屏幕,扫描 中心(起始点)为本船
秦 皇 岛 航 海 学 院 参考位置,量程为12n
mile,即在雷达屏幕上 显示了以本船为中心 12n mile为半径的本船 周围海域的雷达回波。
第一节 雷达目标探测与显示基本原理
统一公共基准点CCRP(Consistence
秦Com皇mon岛Refe航renc海e Po学int)院:是雷达IBS(情
秦 皇 岛 航 海 学 院 发自于扫描起始点的径向扫描线在屏幕上沿顺时针方
秦 皇 岛 航 海 学 院 由于雷达设备自身的性能、大气传播的条件、目标
的反射能力以及周围环境的变化都会影响雷达图像的形 成与质量,使雷达探测到的目标回波图像与真实目标相
Q H D H H X Y 比,可能会有很大的变形,比如:
► 雷达回波图像类似目标迎问天线面的垂直投影; ► 雷达只能探测目标的前沿,后沿被遮挡的部分无法
秦 皇 岛 航 海 学 院 船舶等对船舶导航
避碰安全航行有用 的各种回波之外, 还出无各法种避驾免驶员地显不示希望看到的回波,如海浪、雨雪、同频干扰、云雾、噪声、假 回波等。一个专业的雷达观测者,应能够在各种杂波干扰和复杂屏幕背景中分 辨出有用回波,引导船舶安全航行。
第一节 雷达目标探测与显示基本原理
Q H D H H X Y 成像、识别、检测、定位和跟踪。 电磁波具有似光性,在地球表面近似以光速直线 传播,遇到物体后会被反射回去。
Q H D H H X Y 英文:Radar---Radio Detection And
Ranging,即无线电探测与测距。
秦 皇 岛 航 海 学 院 ★ 应用于船舶导航的雷达成为船舶导航雷达
后
D
H
H
X
Y
C图为雷达屏幕,扫描 中心(起始点)为本船
秦 皇 岛 航 海 学 院 参考位置,量程为12n
mile,即在雷达屏幕上 显示了以本船为中心 12n mile为半径的本船 周围海域的雷达回波。
第一节 雷达目标探测与显示基本原理
统一公共基准点CCRP(Consistence
秦Com皇mon岛Refe航renc海e Po学int)院:是雷达IBS(情
秦 皇 岛 航 海 学 院 发自于扫描起始点的径向扫描线在屏幕上沿顺时针方
船用导航雷达

2
按显示 目标动 态方式 不同分
①矢量型
目标动态矢 量显示
②图示型 (PAD型)
目标动态用 PAD显示
精度高、 画面清晰
直观方便
不 如 PAD 直观
精度差、 图象画 电 视 光
栅光标
《航海雷达与ARPA〉第二篇
计程仪
雷达
陀螺罗经
Ch1 绪论
传感器
信号预处理与目标检测
目标船相对速度relspd相对航向relcrs真速度truespd和真航向truecrs5cpatcpa安全界限值mincpamintcpamincpacpa安全界限值允许目标安全通过本船所需的最小会遇距离mintcpatcpa的安全界限值允许目标到达cpa点的最小时间航海雷达与arpa第二篇ch1绪论6在arpa中mincpamintcpa由驾驶员来设定输入7设置mincpamintcpa应考虑的因素1本船大小速度操纵性能若船大速度mincpa大2水域宽阔程度船舶密度若窄密mincpa小3气象条件风浪雾雪若风浪大雾大nincpa大航海雷达与arpa第二篇ch1绪论mincpatcpamintcpa则判断为安全船无碰撞危险mincpatcpamintcpa危险船但尚不紧迫本船应考虑避让措施mintcpa非常危险船本船应立即采取避让措施航海雷达与arpa第二篇ch1绪论图214相对运动雷达人工标绘避碰流程图传感器在crt上观测目标检测目标目标录取选择避让目标确定目标初始位置数据人工标绘避碰作图按规定的时间间隔观测目标位置数据并标绘计算目标的航向航速方位距离cpatcpa分析每个目标速度三角形及避碰三角形计算目标参数人工设定mincpamintcpa设置安全判据危险船
CPA、MIN
设置安全判据
危险船?
TCPA
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
英文:Radar---Radio Detection And Ranging,即 无线电探测与测距。
★ 应用于船舶导航的雷达成为船舶导航雷达 (Shipborne Navigation Radar),亦称航海雷达 (Marine Radar)或船用雷达,在航海中通常简称雷 达。
第九章 船舶导航雷达
最性能标准要求CCRP可以由驾驶员根据需 要设置,典型位置通常为驾驶台指挥位置。
第一节 雷达目标探测与显示基本原理
在雷达屏幕上,HL(Head Line)称为船首线,指示船首 方向,来自本船艏向装置(THD)或陀螺罗经。
发自于扫描起始点的径向扫描线在屏幕上沿顺时针方向 匀速转动,转动周期与雷达天线在空间的转动周明一致。
屏幕上等间距的同心圆称为固定距标圈(Range Ring, RR),每圈间隔2n mile,用来估算日标的距离。与固定距 标圈同心的虚线圆是活动距标圈(Variable Range Mark, VRM),它可以由操作者随意调整半径,借助数据读出窗 口的指示测量目标的准确距离。
EBL(Electronic Bearing Line)称为电子方位线,通过 面板操作控制其在屏幕的指向,借助数据读出窗口的指示或 屏幕边缘显示的方位刻度,测量目标的方位。
弱,也无法被探测到; ► 雷达发射脉冲的宽度会使探测到的回波发生后沿
“拖尾”现象,造成回波与实际目标形状不相符; ► 雷达屏幕像素尺寸使回波的位置向周围扩展;
第一节 雷达目标探测与显示基本原理
► 雷达的辐射波束宽度引起回波沿周方向扩展,造成 回波向左右扩展;
► 船舶运动、涌浪波动及雷达设备因素引起回波位置 闪烁不定,目标边缘不清晰;
雷达系统将雷达传感器探测到的本船周围目 标以平面位置图像的方式显示在屏幕上。 ► 目标距离和方位的测量都是在显示器上通过 测量目标回波来完成的。
第一节 雷达目标探测与显示基本原理
雷达图像基本元素
本船周围有一岛屿,另有 一目标船与本船相向行驶
B图为海平面 俯视图,本船 航向000°,目 标船航行在本 船右舷,岛屿 在本船左舷后
● IMO在雷达性能标准中指出:雷达通过显示 和识别其他水面船只、障碍物和危险物、导航目 标和海岸线等相对于本船的位置,来帮助船舶安 全导航和避免碰撞。
● 雷达能够及时发现远距离弱小目标,精确测 量本船相对目标的距离和方位,确定船舶位置, 引导船舶航行。通过传感器的支持,雷达还具备 了目标识别与跟踪、地理参考信息显示等功能, 能够更好地避免船舶碰撞,保障航行安全。
C图为雷达屏幕,扫描 中心(起始点)为本船 参考位置,量程为12n mile,即在雷达屏幕上 显示了以本船为中心12n mile为半径的本船周围 海域的雷达回安静
第一节 雷达目标探测与显示基本原理
统一公共基准点CCRP(Consistence Common Reference Point):是雷达IBS(情报系统库 Information Bank Sysrem)中的重要组成部分,是 雷达测量目标所得到的数据如距离、方位、相对 航向和航速、本船与目标船的最近会遇距离 (Distance to the Closet Point of Approach,CPA) 和航行到最近会遇距离所需时间(Time to the Closet Point of Approach,TCPA)等的参考点, 通常是雷达天线辐射器在雷达屏幕上的对应位置。
► 地球曲率影响雷达地平距离,远距离高大目标只有 顶端能够被探测到,图像与目标原貌甚至完全不同;
► 目标对雷达波的反射能力不同,造成回破强度差别 好大,图像明暗不均;
► 由于气象海况以及船舶吃水的变化,即使在同一海 域,船舶不同航次,回波图像也会有差别;
通常,雷达屏 幕上除了显示岛屿、 岸线、导航标忐、 船舶等对船舶导航 避碰安全航行有用 的各种回波之外, 还无法避免地显示
出各种驾驶员不希望看到的回波,如海浪、雨雪、同频干扰、云雾、噪声、假 回波等。一个专业的雷达观测者,应能够在各种杂波干扰和复杂屏幕背景中分 辨出有用回波,引导船舶安全航行。
第一节 雷达目标探测与显示基本原理
雷达图像的特点:
由于雷达设备自身的性能、大气传播的条件、目标 的反射能力以及周围环境的变化都会影响雷达图像的形 成与质量,使雷达探测到的目标回波图像与真实目标相 比,可能会有很大的变形,比如:
► 雷达回波图像类似目标迎问天线面的垂直投影; ► 雷达只能探测目标的前沿,后沿被遮挡的部分无法
探测和显示; ► 目标的低矮部分(如沙滩)可能会被遮挡或回波微
船舶导航雷达
第九章 船舶导航雷达
第九章 船舶导航雷达
★ 什么是雷达呢? 雷达发射微波脉冲(即电磁波)对目标进行照射,
同时接收目标对电磁波的反射回波,从而发现目标 并测定其参数,即利用电磁波来完成对目标的成像、 识别、检测、定位和跟踪。
电磁波具有似光性,在地球表面近似以光速直线传 播,遇到物体后会被反射回去。
第九章 船舶导航雷达
第一节 雷达目标探测与显示基本原理 第二节 雷达观测性能与观测技术 第三节 目标观测特性 第四节 影响雷达正常观测的因素 第五节 雷达定位与导航 第六节 雷达目标跟踪 第七节 雷达显示AIS报告目标 第八节 影响目标跟踪精度的因素
第一节 雷达目标探测与显示基本原理
在雷达工作环境中,能够反射雷达波的物体, 如岸线、岛屿、船舶、浮标、海浪、雨雪、云 雾等等,统称为目标。这些目标的雷达反射波 被雷达天线接收后经过接收系统处理,最终在 显示器上显示为加强亮点,这些加强亮点就是 目标回波。
很多雷达将VRM/EBL联动,称为电子距离方位线 ( Electronic Range/ Bearing Line,ERBL),可以通过一次性 操作同时测量目标的距离和方位。
第一节 雷达目标探测与显示基本原理
早期的雷达显 示器也称PPI(平面 位置显示器),现 代雷达采用平面光 栅显示器取代了PPI, 如右图。屏幕上包 括了雷达图像区域、 操作菜单区域、状 态指示区域、数据 显示区域等。
★ 应用于船舶导航的雷达成为船舶导航雷达 (Shipborne Navigation Radar),亦称航海雷达 (Marine Radar)或船用雷达,在航海中通常简称雷 达。
第九章 船舶导航雷达
最性能标准要求CCRP可以由驾驶员根据需 要设置,典型位置通常为驾驶台指挥位置。
第一节 雷达目标探测与显示基本原理
在雷达屏幕上,HL(Head Line)称为船首线,指示船首 方向,来自本船艏向装置(THD)或陀螺罗经。
发自于扫描起始点的径向扫描线在屏幕上沿顺时针方向 匀速转动,转动周期与雷达天线在空间的转动周明一致。
屏幕上等间距的同心圆称为固定距标圈(Range Ring, RR),每圈间隔2n mile,用来估算日标的距离。与固定距 标圈同心的虚线圆是活动距标圈(Variable Range Mark, VRM),它可以由操作者随意调整半径,借助数据读出窗 口的指示测量目标的准确距离。
EBL(Electronic Bearing Line)称为电子方位线,通过 面板操作控制其在屏幕的指向,借助数据读出窗口的指示或 屏幕边缘显示的方位刻度,测量目标的方位。
弱,也无法被探测到; ► 雷达发射脉冲的宽度会使探测到的回波发生后沿
“拖尾”现象,造成回波与实际目标形状不相符; ► 雷达屏幕像素尺寸使回波的位置向周围扩展;
第一节 雷达目标探测与显示基本原理
► 雷达的辐射波束宽度引起回波沿周方向扩展,造成 回波向左右扩展;
► 船舶运动、涌浪波动及雷达设备因素引起回波位置 闪烁不定,目标边缘不清晰;
雷达系统将雷达传感器探测到的本船周围目 标以平面位置图像的方式显示在屏幕上。 ► 目标距离和方位的测量都是在显示器上通过 测量目标回波来完成的。
第一节 雷达目标探测与显示基本原理
雷达图像基本元素
本船周围有一岛屿,另有 一目标船与本船相向行驶
B图为海平面 俯视图,本船 航向000°,目 标船航行在本 船右舷,岛屿 在本船左舷后
● IMO在雷达性能标准中指出:雷达通过显示 和识别其他水面船只、障碍物和危险物、导航目 标和海岸线等相对于本船的位置,来帮助船舶安 全导航和避免碰撞。
● 雷达能够及时发现远距离弱小目标,精确测 量本船相对目标的距离和方位,确定船舶位置, 引导船舶航行。通过传感器的支持,雷达还具备 了目标识别与跟踪、地理参考信息显示等功能, 能够更好地避免船舶碰撞,保障航行安全。
C图为雷达屏幕,扫描 中心(起始点)为本船 参考位置,量程为12n mile,即在雷达屏幕上 显示了以本船为中心12n mile为半径的本船周围 海域的雷达回安静
第一节 雷达目标探测与显示基本原理
统一公共基准点CCRP(Consistence Common Reference Point):是雷达IBS(情报系统库 Information Bank Sysrem)中的重要组成部分,是 雷达测量目标所得到的数据如距离、方位、相对 航向和航速、本船与目标船的最近会遇距离 (Distance to the Closet Point of Approach,CPA) 和航行到最近会遇距离所需时间(Time to the Closet Point of Approach,TCPA)等的参考点, 通常是雷达天线辐射器在雷达屏幕上的对应位置。
► 地球曲率影响雷达地平距离,远距离高大目标只有 顶端能够被探测到,图像与目标原貌甚至完全不同;
► 目标对雷达波的反射能力不同,造成回破强度差别 好大,图像明暗不均;
► 由于气象海况以及船舶吃水的变化,即使在同一海 域,船舶不同航次,回波图像也会有差别;
通常,雷达屏 幕上除了显示岛屿、 岸线、导航标忐、 船舶等对船舶导航 避碰安全航行有用 的各种回波之外, 还无法避免地显示
出各种驾驶员不希望看到的回波,如海浪、雨雪、同频干扰、云雾、噪声、假 回波等。一个专业的雷达观测者,应能够在各种杂波干扰和复杂屏幕背景中分 辨出有用回波,引导船舶安全航行。
第一节 雷达目标探测与显示基本原理
雷达图像的特点:
由于雷达设备自身的性能、大气传播的条件、目标 的反射能力以及周围环境的变化都会影响雷达图像的形 成与质量,使雷达探测到的目标回波图像与真实目标相 比,可能会有很大的变形,比如:
► 雷达回波图像类似目标迎问天线面的垂直投影; ► 雷达只能探测目标的前沿,后沿被遮挡的部分无法
探测和显示; ► 目标的低矮部分(如沙滩)可能会被遮挡或回波微
船舶导航雷达
第九章 船舶导航雷达
第九章 船舶导航雷达
★ 什么是雷达呢? 雷达发射微波脉冲(即电磁波)对目标进行照射,
同时接收目标对电磁波的反射回波,从而发现目标 并测定其参数,即利用电磁波来完成对目标的成像、 识别、检测、定位和跟踪。
电磁波具有似光性,在地球表面近似以光速直线传 播,遇到物体后会被反射回去。
第九章 船舶导航雷达
第一节 雷达目标探测与显示基本原理 第二节 雷达观测性能与观测技术 第三节 目标观测特性 第四节 影响雷达正常观测的因素 第五节 雷达定位与导航 第六节 雷达目标跟踪 第七节 雷达显示AIS报告目标 第八节 影响目标跟踪精度的因素
第一节 雷达目标探测与显示基本原理
在雷达工作环境中,能够反射雷达波的物体, 如岸线、岛屿、船舶、浮标、海浪、雨雪、云 雾等等,统称为目标。这些目标的雷达反射波 被雷达天线接收后经过接收系统处理,最终在 显示器上显示为加强亮点,这些加强亮点就是 目标回波。
很多雷达将VRM/EBL联动,称为电子距离方位线 ( Electronic Range/ Bearing Line,ERBL),可以通过一次性 操作同时测量目标的距离和方位。
第一节 雷达目标探测与显示基本原理
早期的雷达显 示器也称PPI(平面 位置显示器),现 代雷达采用平面光 栅显示器取代了PPI, 如右图。屏幕上包 括了雷达图像区域、 操作菜单区域、状 态指示区域、数据 显示区域等。