基于SUSAN的指纹细节点提取算法
一种基于SUSAN的综合改进的角点检测算法
一种基于SUSAN的综合改进的角点检测算法潘炜,景晓军,孙松林北京邮电大学电信通信系,北京(100876)E-mail: panbangzhu@摘要:角点是数字图像中重要的几何特征之一,角点的准确提取对于图像匹配、目标识别等领域具有重要意义。
本文首先深入讨论了SUSAN(Smallest Univalve Segment Assimilating Nucleus)算法的结构和优缺点,然后在原有算法的基础上加入了角点预检测机制和优化过滤机制,通过引入自适应性阈值和检测窗,有效地剔出伪角点;引入方型过滤窗找出局部范围内最强的初始角响应,减少了噪声带来的干扰。
改进后的算法能够快速地在存在一定加性噪声干扰的条件下检测出图像含有的真正角点。
仿真实验证明了本文方法的有效性。
关键词:角点检测,Susan,预检测,优化过滤中图分类号:TP3191.引言角点是图像的重要特征之一,通常定义图像中曲率足够高并且位于图像中不同亮度区域交界处的点为角点。
因为具有旋转不变和不随光照条件改变而变化等优点,角点在图像理解、图像匹配、目标识别、光流计算、三维场景重建和运动估计等领域中具有十分重要的意义。
角点在保留图像中物体的重要特征信息的同时有效地减少了信息的数据量,使得对图像处理时运算量大大减少。
近年来各方学者已经提出了很多关于提取角点的算法,目前主要分为两类方法:基于图像边缘的方法[1]和基于图像灰度的方法。
基于图像边缘的方法首先对其进行图像分割,提取边界构成链码,然后找出边界上转折较大的点作为角点.这种方法在算法和处理步骤上过于复杂且对边缘提取算法的依赖性较大。
而基于图像灰度的方法则避开了上述这些缺陷.也可分为两类:基于图像导数的Plessey[2]算法,优点是可靠性高,缺点是由于求导.计算复杂,速度较慢;基于图像灰度对比关系的MIC算法[3]、SUSAN[4]算法,优点是计算简单,有较好的抗噪性能。
SUSAN算法利用计算基于核心点的USAN面积大小,并以此作为初始角点响应.而后搜索所有初始响应中的局部最值,其对应的点被标记为角点。
基于SUSAN分层快速角点检测的改进算法

基于SUSAN分层快速角点检测的改进算法赵杰;马海超【摘要】针对传统基于SUSAN算法的分层快速角点检测算法的缺陷,引入判别角点性能的改进算法.通过分层快速角点检测算法找到角点的大概位置,再利用角点性能判别算法,减少角点的数量,最后进行精细查找,准确定位角点.实验表明,该算法可较大幅度提高运算速度,节省运算时间,显著增强角点的匹配效果.【期刊名称】《电子设计工程》【年(卷),期】2010(018)001【总页数】3页(P5-7)【关键词】角点检测;SUSAN算法;提升小波变换;角点匹配【作者】赵杰;马海超【作者单位】河北大学,电子信息工程学院,河北,保定,071000;河北大学,电子信息工程学院,河北,保定,071000【正文语种】中文【中图分类】TP301.6角点是图像的重要特征,它在保留图像重要信息的同时可有效减少数据量,而且对透视变换及变形都具有较强的鲁棒性[1]。
利用角点特征可显著提高立体视觉匹配和三维重建算法的效率,因此,角点检测在图像匹配以及三维重建中具有重要意义。
角点检测算法主要分为基于图像边缘法[2]和基于图像灰度法[3]两大类。
基于图像边缘法对边缘提取算法的依赖性较大,计算复杂且不能很好地定位角点。
基于图像灰度的方法则不存在上述缺点,该方法又分为两类:一类是基于图像导数的Plessey[4]算法,其可靠性高,但计算复杂,速度慢;而另一类是基于图像灰度对比关系算法,如SUSAN算法,此类算法定位准确,具有积分特性,无需求导运算。
因此,该算法在抗噪能力上具有较大优势,运算速度有所提高,但仍不能满足实时性要求。
基于上述分析,这里引入基于SUSAN算法的分层快速角点检测法与角点“性能好坏”判别算法相结合的角点检测法。
采用由粗到细的分层策略,通过小波变换对角点进行粗略定位,再经“好坏”判别减少角点数量,最后运用SUSAN算法对角点进行精细查找,准确定位角点,从而有效解决了基于SUSAN算法的分层快速角点检测法在对实际图像进行角点检测时,角点数量太多,不利于角点匹配,计算速度慢的问题。
改进的SUSAN角点提取算法

改进的SUSAN角点提取算法
吕海霞;陈红林
【期刊名称】《电光与控制》
【年(卷),期】2008(015)003
【摘要】采用了一种改进的SUSAN角点提取算法.SUSAN角点提取算法主要利用了角点周边的纹理分布特性,即在角点的某个区域内的像素灰度与角点的相似性来完成角点的提取.在此理论基础上,研究了一种新的基于SUSAN理论的改进的SUSAN角点提取算法,该算法利用了角点附近像素灰度的纹理特征来完成角点的提取,即通过控制与核心点相似的点的连通性与数量来确定该点是否为角点.并且针对阚值T固定选取的问题,采用了一种自动选取阈值的新方法.为了进一步验证所提取角点的实用性,利用特征点匹配对其进行了匹配验证.并通过仿真实验对其进行了检验.
【总页数】4页(P45-48)
【作者】吕海霞;陈红林
【作者单位】西北工业大学电子信息学院,西安,710072;西北工业大学电子信息学院,西安,710072
【正文语种】中文
【中图分类】V271.4
【相关文献】
1.一种改进的SUSAN角点提取算法 [J], 张帆;肖阳辉
2.双边几何阈值SUSAN角点提取算法 [J], 钟金荣;顾夏华;林嘉宇
3.一种改进的快速SUSAN棋盘格角点检测算法 [J], 夏海英;刘伟涛;朱勇建
4.利用SUSAN算子提取影像角点的改进方法 [J], 胡东平;周天顺;蒋丹妮
5.一种改进的SUSAN角点检测算法 [J], 郑昊;林玉娥
因版权原因,仅展示原文概要,查看原文内容请购买。
指纹图像细节点及显著特征的提取

指纹图像细节点及显著特征的提取
廖开阳;张学东;章明珠;潘晓红
【期刊名称】《计算机应用》
【年(卷),期】2008(28)9
【摘要】提出了一种改进的指纹细节特征提取算法.该算法首先在细化后的指纹图像上直接提取原始细节特征点集,然后针对不同的噪声,采用针对性的算法,将各类噪声引起的伪特征点分别予以删除,最终保留下来的特征点集即视为真正的特征点集.通过分析细节特征点之间的联系,在整幅图像范围内构造了3种类型的显著特征,提出了一种显著特征提取算法,在已提取的特征点集的基础上,提取出指纹图像的显著特征.
【总页数】3页(P2312-2314)
【作者】廖开阳;张学东;章明珠;潘晓红
【作者单位】辽宁科技大学,计算机科学与工程学院,辽宁,鞍山,114000;西安翻译学院,信息工程系,西安,710000;辽宁科技大学,计算机科学与工程学院,辽宁,鞍
山,114000;东北大学,信息科学与工程学院,沈阳,110000;西安翻译学院,信息工程系,西安,710000;辽宁科技大学,计算机科学与工程学院,辽宁,鞍山,114000
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种基于细节点局部描述子的指纹图像匹配方法 [J], 陈晖;殷建平;祝恩;胡春风;李永
2.基于二值化指纹图像细节点提取的改进算法 [J], 赵磊;姜小奇;蒋澎涛;刘春雷;陈宏君;杨梦婷
3.一种扭曲指纹图像的细节点修正方法 [J], 陈晖;殷建平;祝恩
4.基于细节点频谱的指纹图像匹配算法研究 [J], 陈汉涛;胡旭晓
5.细节点指纹特征提取、匹配方法研究 [J], 蔡凡
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SUSAN的指纹细节点提取算法

基于SUSAN的指纹细节点提取算法
文潇;华骅;徐安士
【期刊名称】《四川大学学报(自然科学版)》
【年(卷),期】2005(042)005
【摘要】在整个指纹识别过程中,指纹图像的细节点提取至关重要.许多算法是先将脊线细化后进行提取,耗时较多,且易产生大量不易去除的伪细节点.作者将一般图象配准中常用的角点检测技术运用到指纹识别中,提出基于SUSAN的指纹细节点提取新算法.该法在传统的SUSAN上进行数项改进,使其适用于指纹图象,完成端点和分叉点的提取,再根据所产生伪细节点的分布情况将它们去除.此法计算简单、抗噪声能力强、不需事先对脊线进行细化.
【总页数】5页(P952-956)
【作者】文潇;华骅;徐安士
【作者单位】北京大学区域光通信网与新型光通信系统国家重点实验室,北
京,100871;四川大学电子信息学院,成都,610064;北京大学区域光通信网与新型光通信系统国家重点实验室,北京,100871
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.基于局部特性的指纹细节点提取算法 [J], 陈书贞;张俊军;练秋生
2.一种结合结构信息的指纹细节点特征提取算法 [J], 吕玉华;李丽娟
3.基于改进SUSAN的遥感图像边界提取算法 [J], 刘立;焦斌亮;刘钦龙
4.基于Gabor相位和图像质量评价的高分辨率掌纹细节点提取算法 [J], 刘重晋;王瀚;封举富
5.基于MATLAB的SUSAN指纹细节点提取 [J], 赵孔新;刘辉
因版权原因,仅展示原文概要,查看原文内容请购买。
SUSAN检测算法概述
SUSAN检测算法检测算法概述概述概述SUSAN算法是1997年英国牛津大学的Smith等人提出的一种处理灰度图像的方法。
探测算子的基本原理是:与每一图像点相关的局部区域具有相同的亮度。
下面介绍SUSAN角点检测准则。
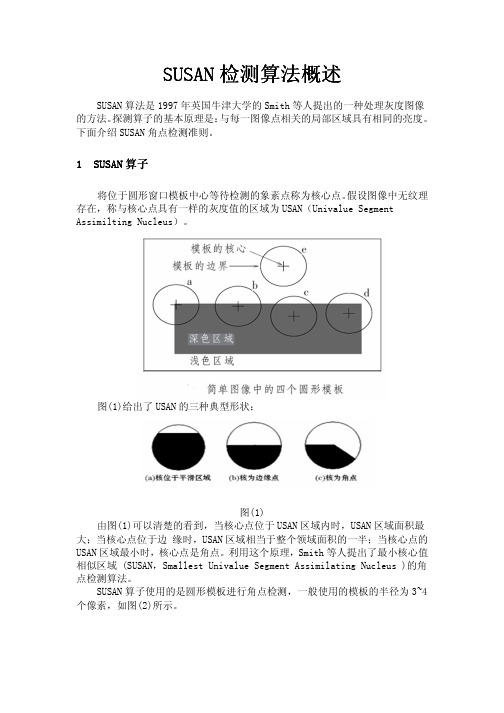
1SUSAN算子将位于圆形窗口模板中心等待检测的象素点称为核心点。
假设图像中无纹理存在,称与核心点具有一样的灰度值的区域为USAN(Univalue Segment Assimilting Nucleus)。
图(1)给出了USAN的三种典型形状:图(1)由图(1)可以清楚的看到,当核心点位于USAN区域内时,USAN区域面积最大;当核心点位于边 缘时,USAN区域相当于整个领域面积的一半;当核心点的USAN区域最小时,核心点是角点。
利用这个原理,Smith等人提出了最小核心值相似区域 (SUSAN,Smallest Univalue Segment Assimilating Nucleus )的角点检测算法。
SUSAN算子使用的是圆形模板进行角点检测,一般使用的模板的半径为3~4个像素,如图(2)所示。
图(2) SUSAN圆形模板将模板中的各点亮度与核心点的亮度利用下面的函数进行比较,(1)在上式中 为图像中像素 的灰度值, t为灰度差别的阈值, 为模板中心的像素, 为其他的像素, C为比较函数。
模板中所有的像素都用这个函数进行比较,然后 计算 出函数C的和值n。
(2)和值n就是USAN(univalue segment assimilating nucleus)区域的像素个数,就是USAN区域的面积,然后把这个面积和几何阈值进行比较,得到最后的响应函数:(3)上式中,R为响应函数,g为阈值,通常在探测角点时取值为1/2模板的像素个数,当采用7×7的模板时,g=37×1/2。
2SUSAN算子的改进算法通常在实际的 应用 中,对于比较函数 我们通常采用下面的比较函数:(4)采用这个函数可以使比较函数具有更好的稳定性,当图像中的像素亮度值有很小的变化后,对于c 的取值不会产生很大的 影响 。
一种改进的SUSAN角点提取方法
一种改进的SUSAN角点提取方法
叶伯洪;徐杜;蒋永平;郭伟华;傅文兰
【期刊名称】《光学与光电技术》
【年(卷),期】2010(0)1
【摘要】针对基本SUSAN算法存在漏检测、处理速度慢以及容易产生伪角点等问题,提出了一种改进的SUSAN角点提取算法。
首先对图像的像素点按边缘点、内部点和背景点进行分类,在此基础上只对边缘点进行SUSAN算法处理,然后检查已经提取到的所有角点,剔除同一区域范围内的伪角点,从而实现对大部分角点的快速、准确提取。
实验结果表明,该算法的运算速度比改进前提高约一倍,能够较准确地检测到目标角点。
【总页数】5页(P47-51)
【关键词】SUSAN算法;角点检测;阈值;伪角点
【作者】叶伯洪;徐杜;蒋永平;郭伟华;傅文兰
【作者单位】广东工业大学信息工程学院;广东怀集登云汽配股份有限公司
【正文语种】中文
【中图分类】TN911.73
【相关文献】
1.改进的SUSAN角点提取算法 [J], 吕海霞;陈红林
2.一种改进的SUSAN角点提取算法 [J], 张帆;肖阳辉
3.一种基于自适应阈值的SUSAN角点提取方法 [J], 刘博;仲思东
4.利用SUSAN算子提取影像角点的改进方法 [J], 胡东平;周天顺;蒋丹妮
5.一种改进的SUSAN角点检测算法 [J], 郑昊;林玉娥
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM的不同场合指纹细节点提取
基于ARM的不同场合指纹细节点提取刘辉【摘要】According to the different quality images, we put forward both the improved 8-neighborhood feature extraction algorithm and SUSAN fingerprint feature extraction algorithm based on ARM. The two algorithm is compared in MATLAB, and the application features are summarizes. Finally the two algorithms are verified in the Arm platform.%基于ARM处理平台,针对不同质量的图像提出改进的8邻域特征提取算法和SUSAN的指纹特征提取算法,在MATLAB下对比了这两种算法的优缺点,总结了其应用的场合,并且在ARM主建平台上验证了这两种算法的快速性和准确性。
【期刊名称】《长春工业大学学报(自然科学版)》【年(卷),期】2012(033)006【总页数】5页(P643-647)【关键词】ARM;MATLAB;SUSAN;细节点提取;8邻域【作者】刘辉【作者单位】吉林建筑工程学院城建学院电气信息工程系,吉林长春130111【正文语种】中文【中图分类】TP391.4130 引言指纹特征提取的目的是要获得真正的细节特征,同时去除由噪声或污染等因素所造成的伪细节特征。
细节特征是指在指纹拓扑图中的几种有效的特征,它是指纹识别的最基本的依据。
即使两枚指纹的总体特征相同,但是它们的细节特征却不可能完全相同。
美国国家标准测量局(National Institute of Standards and Testing,NIST)提出一种指纹细节分类方式,将指纹特征分为4类[1]:端点、分叉点、复合点和未定义特征。
提取指纹图像细节特征 文档
1.1 提取指纹图像细节特征在细化后的指纹图上,就可以提取指纹的细节特征点了。
一般来说,指纹细节特征点信息应包括如下内容:(1)特征点类型,是纹线末端点还是分叉点;(2)特征点坐标,这是在该指纹图坐标系下的绝对坐标值;(3)特征点所在纹线在该特征点处的走向。
对于理想的细化图像,细节特征点的提取是很容易的。
对细化后的指纹图像的所有目标点进行跟踪检测,如果满足sum=255*7,表明该点是纹线末端点;如果满足sum=255*5,表明该点是纹线分叉点。
其中,sum=∑=81i i P 。
由于指纹采集设备或采集人手指状态等原因,采集到的指纹图像几乎不可能是理想的,总要存在模糊、粘连或者断线。
这样,按照理想状态下提取指纹特征点的方法提取到的特征点中要有一部分是伪特征点,所以要进行后处理,去除伪特征点。
后处理包括以下一些情况下的处理:(1) 找到一个末端点后,沿着该末端点反向跟踪m 个点,若在跟踪这m 个点的过程中,出现纹线终止或出现分叉点,则认为该点是伪特征点。
这样可以去除由毛刺而造成的伪特征点。
(2) 找到一个分叉点后,分别沿着该分叉点的3个分支跟踪n 个点,若在跟踪这n 个点的过程中,出现纹线终止或出现分叉点,则认为该点是伪特征点。
这样可以去除由纹线粘连和小环而造成的伪特征点。
(3) 找到一个分叉点后,求出该分叉点的3个分支之间的夹角,若最大的一个夹角大于180°,且最小的夹角大于90°,则认为该点是伪特征点。
这是因为分叉点夹角一般为2个钝角和一个锐角,但是在指纹纹线弯曲处会出现一个夹角大于等于180°,但最小的夹角仍然是锐角。
(4) 指纹图像细化后,边缘处结构很不规范,会造成大量伪特征点的出现,必须予以删除。
对边缘处的特征点的删除一般都是利用位置信息进行的。
前面已经得到了指纹图像的实际范围(见3.2 指纹前景区域的确定),只要将位于图像边缘一定范围内的所有特征点一律作为伪特征点予以删除。
基于预检测SUSAN算法的图像拼接
基于预检测SUSAN算法的图像拼接
曲天伟;陈晓丹;曹雪栋;陈桂兰;杨泽雪
【期刊名称】《信息技术》
【年(卷),期】2014(38)2
【摘要】为了快速精确提取图像角点,提出了一种基于预检测的SUSAN角点提取方法.文中首先采用预检测的方法排除部分伪角点,对预备角点采用SUSAN算法检测出图像的角点.然后采用图像分块技术和近邻角点排除方法来保证角点分布均匀,没有成簇现象,保证后续图像拼接的精度.实验结果表明,此方法不但能提高角点的检测速度,而且能合理地提取图像中的角点,提高角点的检测精度,进而提高图像拼接的速度和精度.
【总页数】4页(P148-150,155)
【作者】曲天伟;陈晓丹;曹雪栋;陈桂兰;杨泽雪
【作者单位】黑龙江工程学院计算机科学与技术系,哈尔滨150050;黑龙江科技大学计算机信息与工程学院,哈尔滨150027;黑龙江工程学院计算机科学与技术系,哈尔滨150050;黑龙江科技大学计算机信息与工程学院,哈尔滨150027;黑龙江工程学院计算机科学与技术系,哈尔滨150050
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于改进SUSAN算子的车道线检测算法 [J], 李让军;叶冬
2.基于改进的SUSAN算法的火焰图像边缘检测研究 [J], 夏凯
3.基于环形模板的SUSAN角点检测算法 [J], 唐坚刚;任琳;林新;李春
4.基于改进SUSAN算法的移动车辆检测 [J], 杨艳爽;蒲宝明
5.基于Harris-SUSAN算法的发动机叶片裂纹检测系统设计 [J], 王晓惠;冯彩英;徐忠根
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:049026756(2005)0520952205基于SU SAN 的指纹细节点提取算法文 潇1,华 骅2,徐安士1(1.北京大学区域光通信网与新型光通信系统国家重点实验室,北京100871;2.四川大学电子信息学院,成都610064)摘要:在整个指纹识别过程中,指纹图像的细节点提取至关重要.许多算法是先将脊线细化后进行提取,耗时较多,且易产生大量不易去除的伪细节点.作者将一般图象配准中常用的角点检测技术运用到指纹识别中,提出基于SUSAN 的指纹细节点提取新算法.该法在传统的SUSAN 上进行数项改进,使其适用于指纹图象,完成端点和分叉点的提取,再根据所产生伪细节点的分布情况将它们去除.此法计算简单、抗噪声能力强、不需事先对脊线进行细化.关键词:端点;分叉点;角点检测;SUSAN ;伪细节点中图分类号:TP391.4 文献标识码:A1 引言 大量研究表明,人的指纹具有唯一性和不变性.首先,两枚指纹匹配上12个特征点的几率为10;其次,胎儿6个月时指纹就完全形成,只要不伤及真皮,其细节特征保持终生不变.即使伤及真皮,所形成的疤痕又可成为新的识别依据.由于指纹用于身份识别的安全性和方便性,各国研究者都对此项技术进行了深入研究.其识别流程如图1所示.图1 指纹识别流程Fig.1 Flow of fingerprint identification 图1中,图象预处理包括纹线平滑、脊线增强、二值化、细化等.然后,再提取细节点作为匹配的依据.美国FB I 指出,两种细节点———指纹脊线的分叉点和端点可以唯一地确定一个指纹.在这个理论基础上,前人提出了多种算法,其中很多是先将采集到的指纹灰度图象二值化,然后再将脊线细化为单象素宽度[1].细化以后,细节点提取相对简单,速度快.但是指纹细化过程耗时较大,而且很易产生许多伪细节点,因此必须在提取后进行更大量的后处理[2,3],增加了时间的消耗,降低了匹配的精度.近年来也出现了一些基于灰度图象的提取算法,但普遍较复杂.角点检测是一般图象配准中常用的方法,但几乎从未应用于指纹检测范围.因为它是基于灰度图象的,而且本身已发展得比较成熟.由此,我们想到将其应用于指纹细节点检测,省去了细化的过程,降低了图象预处理和后处理的难度和耗时.目前,对角点的定义并未统一,针对不同的定义产生了不同的检测方法.其中一种定义为图象中曲率较高的点[4],而指纹的端点也是图象中曲率较高的点,定义上的一致性,加强了角点检测用于指纹识别的理论依据.SUSAN 法就是基于此定义的一种角点检测算法[4],其运算简单,只要参数选择恰当,可达较高的精度,抗噪声能力强.收稿日期:2004210225基金项目:国家自然科学基金(60272023);教育部基金(90104003)作者简介:文潇(1985-),女,2005级硕士研究生.2005年10月第42卷第5期四川大学学报(自然科学版)Journal of Sichuan University (Natural Science Edition )Oct.2005Vol.42No.52 SUSAN 法原理 用一固定大小和形状的模板在图象上移动,若模板内某象素的灰度与模板中心(称为核)灰度之差小于某值,则认为该点与核具有相似的灰度,由满足这样条件的点组成的区域称为核的USAN (Univalue Segment Assimilating Nucleus )区域.考察一灰度图象中,模板处于不同位置时USAN 区域的大小,如图2所示(使用圆形模板).可发现a 情况下,即核为角点时USAN 区域最小,据此可将角点检测出来.图2 SUSAN 原理示意图Fig.2 Sketch map of SUSAN ’s principle 设核为O 点,灰度为I (O ),r 为模板内任一点,灰度为I (r ),令h (r )=1 I (r ) I (O )<y 0 otherwise(1)再计算Susan =∑h (r )(2)O 为角点 Susan ≤m 不是角点 Susan >m(3)式中,y 为灰度差门限,其取值与图象的对比度有关;m 为几何门限,据统计规律,一般设定为整个模板面积的1/3左右.3 基于SUSAN 的细节点提取算法3.1 端点与分叉点提取的统一图3给出了端点和分叉点的示意图.由端点的几何特性可知,其为曲率很高的点,易用SUSAN 法原理检测出来.但除了端点,分叉点也需提取.图3 指纹细节点示意图Fig.3 sketch map of fingerprint ’s minutiae 通过观察可发现,脊线和谷线宽度近似相等,形状与分布相同,唯一的区别是灰度.脊线的分叉点其实就是谷线的端点.由于单个象素的不可分割,精确的圆形模板在灰度图象中无法实现,且圆的方程较复杂,使用和实现不便.所以我们在此处采用正方形模板.当模板在指纹图象上扫描时,出现的情况有图4中所示的4种(黑色表示脊线,白色表示谷线).图4中(a )为我们通常说的“端点”,(b )我们通常说的“分叉点”.因为SUSAN 法是检测模板内各点与核的灰度差,而与核是黑色还是白色无关,所以图4(a ),(b )两种情况都可用此法检出,最后再根据核灰度359第5期 文潇等:基于SUSAN 的指纹细节点提取算法的大小可判断是分叉点还是端点.(a )核为脊线端点 (b )核为谷线端点 (c )核为脊线上普通点 (d )核为谷线上普通点图4 指纹图象中USAN 的四种情况Fig.4 Four cases of USAN in fingerprint image3.2 改进SUSAN 法提取细节点对于250×250左右大的指纹图象,指纹的脊线和谷线一般为3~5个象素宽,若正方形边长太小,U 2SAN 面积大小的改变不灵敏,易检测出伪角点.指纹图象的一个显著特点是纹线间间隔小,因此半径太大易将过多相邻纹线包括在内,使检测不准确.综合考虑两种情况,n ×n 的正方形模板,n 一般取7~11.且为了使核为一个完整的象素点,应取奇数.如式(1)所示,传统SUSAN 是设定一个阈值y ,将USAN 区域定义为灰度“相近”的点.若在指纹图象预处理中包含二值化功能,其效果与设定阈值y 相同,且在判断USAN 区域时就只需检测某点与核是否灰度“相同”,更为简便.由此保持式(2)和式(3)不变,式(1)改写为h (r )=1 I (r )-I (O )=00 otherwise (4) 再观察图2,我们发现角点首先是边缘点,由此想到在扫描各点时,只对先确定为边缘点的象素点执行SUSAN 算法,可大大减少运算次数,且边缘点的判断也较容易,其简略流程如图5所示. 图5 边缘点判别流程图Fig.5 Flow chart of edge identification 同时,由于阈值m 带来的精度问题,距离某角点很近的其他边缘点也可能错被检测为角点.设O 1,O 2分别为先后检测到的两个角点,当它们满足判别式(5)时,将O 2滤掉. |X (O 1)-X (O 2)|<Width /2& |Y (O 1)-Y (O 2)|<Width /2(5)在运行以上算法后,发现一个问题:有的纹线(包括脊线和谷线)特别细,导致当核处于它们的非端点上时(如图4中(c ),(d )情况),计算所得的USAN 区域也很小,而被错判为角点,且图象中往往存在相邻数根纹线都很细的区域,会产生大量伪角点,应去除.传统的去伪方法是根据细节点之间的距离、夹角等[2].由于我们的提取算法不同,所产生的伪角点具有一些独特性质.取部分此类伪角点进行观察,发现虽然它们的USAN 面积也很小,但以它们为中心的n ×n 领域中h (r )为“1”的点的分布与真实的角点有所不同,一般都贯通模板的对边或邻边,如图6所示.由此我们设计如下算法,在某点被检测为角点后,记录其3×3领域内共8个点中h (r )的值,然后对其进行分析,对这8个点编号如图7.当两个h (r )=1的点及核3点共线时,USAN 区域趋近于贯通分布,即对应伪细节点.具体判别程序流程如图8所示.最后,若需要将端点和分叉点区分开来.每测出一个角点时,记录其灰度值(因为图已二值化,只有0和255两个值),由该信息很易区分端点和分叉点,再分类标记.459四川大学学报(自然科学版) 第42卷 图6 本算法产生的伪节点示意图Fig.6 Sketch maps of fake minutiaes produced by this algorithm 图7 核的3×3邻域分析Fig.7 Analysis of nucleus ’3×3vicinity 图8 去伪流程图Fig.8 Flow chart of fake minutiaes reducing4 实验结果及讨论 我们用C ++实现了以上算法,并使用它对一些指纹进行了处理.图9是任意一个指纹的处理结果.图9中(a )为采集到的指纹原始图象,(b )为经过脊线增强、二值化等预处理后的灰度图象,在此基础上采用我们的算法,可得到(c )图.(a ) (b ) (c ) 图9 细节点提取结果Fig.9 Results of minutiae extraction 由图9(c )图可以看出,几乎所有的端点和分叉点都能被提取出来.而且跟踪程序,比较使用图8所示算法前后,去掉了大约10个伪细节点,证明此法虽然使占用的内存增加了,但是是必要而有效的.综上可见,改进角点检测中的经典算法SUSAN ,将其应用于指纹细节点提取.发挥了SUSAN 计算、编程均较简单、抗噪声能力强的优点.也有较快的速度和较好的准确度,不失为一种可行实用的算法.但559第5期 文潇等:基于SUSAN 的指纹细节点提取算法659四川大学学报(自然科学版) 第42卷此法很大程度上取决于预处理中二值化的效果,对其有较高要求.参考文献:[1] Ratha N K,Chen S,Jain A K.Ada ptive flow orientation2based feature extraction in fingerprint images[J].Pattern Recog2nition,1995,28(11):1657-1672.[2] 尹义龙,宁新宝,张晓梅.改进的指纹细节特征提取算法[J].中国图象图形学报(A),2002,7(12):1302-1305.[3] 冯国进,顾国华,张保民.指纹图象预处理与特征提取[J].计算机应用研究,2004,5:183-185.[4] Smith S M,Brady J M.SUSAN———A new approach to low level image processing[J].International Journal of Com puterVision,1997,23(1):45-78.[5] K aru K,Jain A K.Fingerprint Classification[J].Pattern Recognition,1996,29(3):389-404.[6] Miroslav T,Mark H.Fast Corner Detection[J].Image and Vision Computing,1998,16:75-87.[7] Prabhakara S,Jain A K,Pankanti S.Learning fingerprint minutiae location and type[J].Pattern Recognition,2003,36:1847-1857.[8] Zheng Zhiqiang,Wang Han,Eam Khwang Teoh.Analysis of gray level corner detection[J].Pattern Recognition Letters,1999,20:149-162.[9] 周鹏,谭勇,徐守时.基于角点检测图象配准的一种新算法[J].中国科学技术大学学报,2002,32(4):455-461.An Algorithm for Extraction of Fingerprint Minutiae B ased on SUSANW EN Xiao1,HUA Hua2,X U A n2shi1(1.Peijing University,Peijing100871,China;2.College of Electronics and Information Engineering,Sichuan Univ.,Chengdu610064,China)Abstract:Minutiae extraction plays an important role in fingerprint identification.Most of the algorithms re2 quire the ridges being thinning first,which is time consuming and would produce a lot of fake minutiae.A new algorithm based on SUSAN in corner detection is proposed for fingerprint identification.It makes several ameliorations on traditional SUSAN to serve the fingerprint turn,uses the algorithm to extract both of the endings and bifurcations,and reduce the number of fake minutiae according to their distribution.This algo2 rithm is simple,noise-resisting,and ridge thinning free.K ey w ords:ending;bifurcation;corner detection;SUSAN;fake minutiae。