飞剪技术PLC
西门子s7-200plc在飞剪电气控制系统中的应用
西门子S7-200PLC在飞剪电气控制系统中的应用何小书郝俊强(北京二十一世纪科技发展有限公司100096)[摘要]介绍西门子S7-200CN PLC在铝带材横切机组的电气控制系统中的应用,特别是旋转式飞剪的系统组成、控制方法和数学模型、程序设计思想及实际效果。
关键词旋转式飞剪、全数字直流调速装置、PLC、定尺Application of SIEMEMS S7-200CN PLC in the electric system of cut to length machine and rotating flying shear for aluminum sheetAbstract:The electric control system of cut to length machine for aluminum sheet was introduced. The rotating flying shear for aluminum sheet, control method and mathematical model, program design, applied really result and siemens S7-200CN PLC was mainly described.Keywords:rotating flying shear;fully digital microprocessor-controlled DC variable speed drives;PLC;setting scale铝带材横切机组的主要工作是将经冷轧机轧制完毕的铝带材切去头尾、切边、矫直、横切、垛板。
主要设备有开卷机、切头剪、圆盘剪、矫直机、飞剪、皮带机、垛板台等。
飞剪是其中的关键设备,它在保证剪刃和机列其它设备及带材的速度同步配合的情况下,将平动中的带材按要求的定尺进行高精度的剪切。
图1横切机组的主要设备组成简图。
飞剪的应用与自动控制原理方法
飞剪的工作原理吕建东2014年3月18号飞剪的逻辑控制过程由PLc系统实现,在上位机系统可设定定尺剪的控制参数(其中包括定尺的长度Ll、定尺数量N、剪切因子等)、启动,停止,测试定尺剪,在生产过程中,由18#机架后面的热金属探测器检测到钢材头部的时间Tn,同时开始计时,根据时问和成品机架的线速度S、热金属探测器到定尺剪交叉位之间的距离LO 可以计算出定尺剪启动剪切的时间点Tn+1。
其中:Tn+1=Tn+(LO+L1‘N)/SPLC系统根据不同的速度、品种规格计算和优化出最佳的剪切曲线㈣,通过DP总线把速度的给定值传送到定尺剪的直流传动系统,完成每一个剪切周期。
1硬件构成及功能棒材生产线一般配置三台剪子,本生产线根据实际的需要增加了一台飞剪,因此本系统又四台飞剪,分别为1#、2#、3#、3B#剪,l#、2#飞剪用于生产过程的切头、切尾、碎断,3#、3B#剪根据上位机系统的设定完成不同规格品种的定尺剪切,把轧件跟据预先设定的长度按不同的倍数进行剪切,分段送到冷床,确保定尺的精度,以提高定尺率,优化产品的技术经济指标。
飞剪动作执行过程包括剪切及定位。
飞剪在正常剪切过程下有三个可能运行状态(运行速度):自动速度、碎断速度、测试速度。
在生产过程中使用最多的之中状态是自动状态。
碎断速度的使用是轧件在生产过程如果出现不正常现象,需要对轧件进行碎断处理时用到。
测试速度主要是作为准备生产前对设备时候正常状态的测试。
飞剪系统由两部分组成:一是直流传动装置,二是逻辑控制单元(属于基础自动化级)。
飞剪的自动速度匹配信号是基础自动化级给定的。
飞剪在剪刀位置安装由位置检测编码器和定位接近开关,在剪机前有热会属探测器。
它的基本原理是:当有轧件来时,热金属检测器HMD检测到轧件信号后,飞剪电机经过启动延时,以超前于前一架轧机线速度一定量的速度启动,达到自动剪切速度值,先加速后匀速,运行至剪切点时,剪刃闭合,对轧件进行剪切。
然后,飞剪进入定位过程。
基于PLC的飞剪控制系统在连退机组的应用
基于PLC的飞剪控制系统在连退机组的应用作者:付聪来源:《科技视界》2014年第07期【摘要】飞剪是连续退火机组的重要组成部分,其控制的精确度、可靠性对成品的质量以及机组的稳定运行都有至关重要的影响。
本文描述了连续退火机组出口飞剪的剪切过程及基于PLC系统的飞剪控制方法。
【关键词】飞剪;剪切控制;西门子S7-4000 概述本条连退机组出口段设置有一台曲柄式飞剪(简称飞剪),其作用是不停机剪切焊缝、切废及取样。
较之于传统的横切剪,飞剪在剪切时带钢不必停止,而是低速(最大60m/min)运行,从而保持了带钢运行的连续性,提高了生产效率。
1 飞剪控制系统组成本机组采用西门子S7-400 PLC对飞剪进行主要控制,控制器选用了西门子CPU 416-2。
该控制器完成的功能包括:接收并处理L2级或HMI下发的剪切指令,计算飞剪的启动时间点,接收编码器反馈值并计算剪刃实际角度,计算并向变频装置下发飞剪的速度与加速度设定值,将飞剪的状态反馈至HMI人机界面等。
对飞剪电机的驱动采用西门子S120变频传动装置,通过增量型脉冲编码器对飞剪速度进行检测,以实现精确闭环控制。
本机组飞剪控制系统组成见图1。
2 飞剪的控制方式本机组飞剪的控制方式分为:单次剪切、自动剪切。
1)单次剪切这种方式用于在飞剪机旁操作箱上手动操作剪切,剪切命令通过按下操作箱上的单次剪切按钮发出。
飞剪接收到剪切命令的同时立即启动,完成一个剪切周期后自动回到等待位。
单次剪切通常用于飞剪的维护,以及处理特殊情况,比如断带剪切等。
2)自动剪切这种方式用于机组生产过程中,PLC根据需要在适当的时机启动飞剪,并实时控制飞剪的速度、加速度,以完成对带钢定长剪切。
自动剪切模式是飞剪的主要控制方式,本文描述的飞剪控制都是关于这种模式的。
3 飞剪的剪切过程本机组的飞剪控制方式主要采用定长剪切,有以下几个过程:1)剪刃停止在等待位,即图2中的位置A;2)根据带钢的剪切位置提前计算好启动时间点,当时间点到达时,启动飞剪加速到达入切角,即图2中的位置B;3)保持剪刃的横向速度等于(或略微大于)带钢运行速度,直到飞剪到达离切角,即图2中的位置D;4)飞剪离开离切角后,根据剪切板带长度,计算出剪刃再次到达入切角的时间点,通过调整剪刃速度,使再次达入切角的时间点与计算值吻合;5)若继续剪切,重复过程(3)和(4);6)若不再剪切,则过程(3)结束后,剪刃减速停止到等待位,在此过程中如果没有足够的减速距离,剪刃会冲过等待位,待速度为0后自动反爬到等待位。
毕业设计演讲稿:飞剪控制系统的研究

PLC与上位机的通讯
PC机与S7-400PLC的连接可以采用PC/PPI电缆 连接,也可以采用CP5611卡等进行通信。 在工程设计中,首先要连接好PLC下载线,设 置编程软件通过USB接口的下载线与PLC进行通信, 通讯设置过程: 1. 对于CN的S7-400PLC,编写PLC程序时编程软件必 须设置为中文界面,才可以下载PLC程序。打开 STEP7-Micro/Win编程软件,如图所示,在菜单栏中 选中“Tools->Options->General”,在语言选择栏 中选择“Chinese”,然后单击“确定”按钮并关闭 软件,然后重新打开,即为中文界面。
基于OPC Server的PC与S7-400PLC的通信
通讯方案构架
Simatic NET是西门子公司一款基于OPC技术的自动化控 制方案实现软件,支持多种通信协议,广泛应用于分布式自 动化系统中。文中PC机和PLC间基于OPC技术的通信通过该软 件进行配置实现,两者间的通信是基于PC机里建立的两个虚 拟站(Simatic 400 Station和Simatic PC Station)。两站之 间的通信通过Profibus协议实现,其中PC站配置成OPC服务器, 通过OPC标准接口和PLC实现通信;另一端PC机上应用软件可 以作为OPC客户端去访问OPC服务器,从而实现客户端与S7400系列PLC间的通信。
飞剪控制系统的结构
飞剪控制系统的结构:
飞剪控制系统的结构
飞剪控制系统的结构框图:
PLC与上位机的通讯
通讯方法: 在西门子工控系统中,通常可以采用组态软件 Wincc、ProTool以及ProDave等几种方法来实现 PLC与上位机之间的通信。 Wincc采用了最新的32位技术过程监控软件, 具有良好的开放性和灵活性。无论是单用户系统, 还是冗余多服务器/多用户系统,Wincc均是较好 选择。其优点是数据传输速度快、易扩展、实时 性好,缺点是传送数据区域有限,在PLC中必须进 行相应的处理,且软、硬件成本高。
飞剪操作说明书V1

飞剪操作说明书1飞剪操作主要步骤1.1装置上电●传动控制电源进线开关●传动柜风机电源开关●传动主回路进线开关●传动控制单元电源开关●励磁电源开关●电机通风机电源开关●PLC系统电源开关1.2检查润滑信号●集中操作台:润滑OK指示灯常亮●或就地操作台:润滑OK指示灯常亮1.3飞剪投入●集中操作:飞剪投入/原位按钮1.4进入自动状态●集中操作:按自动按钮,指示灯亮2功能选择及参数设定2.1选择控制功能切头、切尾、分段、优化2.2设定控制参数速度超前率,切头、切尾长度2.3设定飞剪机械结构(注)选择相应机械结构注:当飞剪为固定结构时,无须进行此项操作。
2.4选择出口机架(注)选择相应出口机架注:当飞剪为固定出口机架时,无须进行此项操作。
倍尺剪出口机架为:18,16,14。
2.5选择测长方式选择测量优先(或辊径优先)冷剪采用辊径优先3飞剪诊断辅助操作3.1模拟剪切起动/停止模拟模拟剪切条件:飞剪投入,自动选择,出口机架运转。
注意:必须出口机架起动后,再起动模拟,否则模拟不正常。
3.2报警处理●报警响应●音响解除:按一下故障响应钮●故障复位:速按两下故障响应钮3.3检查冷、热金属检测器信号●冷、热检测试:按动冷热金属检测器测试按钮,观察对应指示灯亮●观察各冷、热检信号计数的一致性。
3.4检查测长记录●观察所记录的最后10次测量辊周长测量值的一致性。
4飞剪原位标定操作操作地点:飞剪就地操作箱操作步骤:(1)操作箱上的“就地_关断_集中”选择开关选到“就地”,操作允许指示灯点亮。
按一下飞剪投入按钮。
(2)按下“故障响应”,同时按一下飞剪“投入”后,松开按钮,飞剪“投入”指示定开始闪烁,表明系统进入原位标定状态。
(3)剪刃开始缓慢运动,寻找原位开关,此时不要进行任何操作。
(4)等待剪刃找到原位开关并已停止不动后,操作飞剪“正反点动”选择开关,将剪刃点动到剪刃闭合点,停止点动操作,按一下飞剪“关断”按钮,此时原位标定过程结束。
NJ实现飞剪与追剪功能
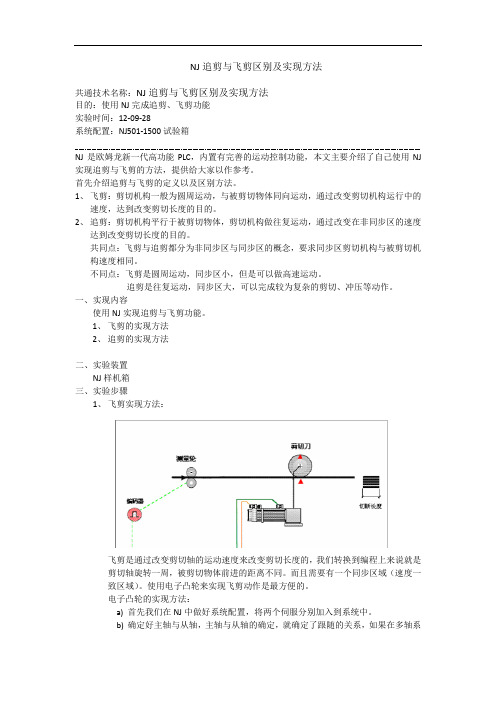
NJ追剪与飞剪区别及实现方法共通技术名称:NJ追剪与飞剪区别及实现方法目的:使用NJ完成追剪、飞剪功能实验时间:12-09-28系统配置:NJ501-1500试验箱NJ是欧姆龙新一代高功能PLC,内置有完善的运动控制功能,本文主要介绍了自己使用NJ 实现追剪与飞剪的方法,提供给大家以作参考。
首先介绍追剪与飞剪的定义以及区别方法。
1、飞剪:剪切机构一般为圆周运动,与被剪切物体同向运动,通过改变剪切机构运行中的速度,达到改变剪切长度的目的。
2、追剪:剪切机构平行于被剪切物体,剪切机构做往复运动,通过改变在非同步区的速度达到改变剪切长度的目的。
共同点:飞剪与追剪都分为非同步区与同步区的概念,要求同步区剪切机构与被剪切机构速度相同。
不同点:飞剪是圆周运动,同步区小,但是可以做高速运动。
追剪是往复运动,同步区大,可以完成较为复杂的剪切、冲压等动作。
一、实现内容使用NJ实现追剪与飞剪功能。
1、飞剪的实现方法2、追剪的实现方法二、实验装置NJ样机箱三、实验步骤1、飞剪实现方法:飞剪是通过改变剪切轴的运动速度来改变剪切长度的,我们转换到编程上来说就是剪切轴旋转一周,被剪切物体前进的距离不同。
而且需要有一个同步区域(速度一致区域)。
使用电子凸轮来实现飞剪动作是最方便的。
电子凸轮的实现方法:a)首先我们在NJ中做好系统配置,将两个伺服分别加入到系统中。
b)确定好主轴与从轴,主轴与从轴的确定,就确定了跟随的关系,如果在多轴系统中,需要仔细确认,因为剪切轴需要根据被剪切轴的速度来运行,所以我们设定被剪切轴为主轴,剪切轴为从轴。
电子凸轮功能实现的要求:主轴要求从0开始,从小到大排列,不能有重复数据。
从轴要求从0开始,数据排列无要求。
根据以上两点,我们可以看出,无法直接使用被剪切轴作为主轴来使用,我们添加一个虚轴来代替被剪切轴使用。
c)虚轴:虚轴设定为0-360的环形计数模式,虚轴旋转一周,剪切轴完成一次剪切动作,两轴之间做电子凸轮运动d)被剪切轴:被剪切轴与主轴之间使用电子齿轮功能,通过修改电子齿轮比来修改被剪切轴的速度,也就修改了裁切的长度。
飞剪控制
棒线材轧制中飞剪自动化控制1.1飞剪对自动化和传动系统的要求(1)飞剪的控制站采用一台西门子S7 315-2DP/PN和高速计数器模板FM350-1组成,飞剪的运动控制主要在PLC 系统中完成,基础自动化的PLC和HMI对飞剪的控制主要体现在工艺操作和显示方面,例如,合分闸、速度设定、头尾长度设定、剪切模式设定、故障报警、实际值显示等,运动控制完全移到传动系统中。
基础自动化PLC对飞剪传动装置的通讯方式也为PROFIBUS-DP通讯。
(2)功率储备因为飞剪在启动和制动时要求有足够大的加速度,所以要求电动机和整流装置有足够功率储备,一般应有2.5倍的过载能力。
虽然剪切的工作周期比较短,发热量有限,但是如果像倍尺飞剪那样间歇时间不够长,也应当考虑散热的问题。
(3)速差补偿实际中轧件的线速度并不恒定,而剪刃的启动时间是按照轧件匀速运动的条件进行计算的,其结果使得剪切长度不准确。
因此,要求传动控制系统对轧件速度变化进行补偿。
通常采用速差电流的方法进行补偿。
这种补偿的方法本质上是一种微分反馈的原理。
补偿的原理如图1所示。
转速设定值转速实际值速差电流补 偿 值电流设定值电流实际值系数速差阈值电流调节器图1 速差电流补偿的原理图速差电流补偿的另一个好处是使电动机的速度严格跟随设定值。
在加速段中,电动机的速度波形成为标准的三角形,启动时间的计算值和实际值吻合精度很高。
在减速段中,可以使剪刃按照计算值准确地停在停止位。
(4)速度检测和位置检测目前的传动装置多用增量型脉冲编码器作为速度检测。
利用传动装置中脉冲计数功能就可以得到剪刃的位置信号。
剪刃实际位置的百分值由下式求出i P C K act ⨯⨯=144420θ (3)式中,act θ: 位置实际值;K 42: 位置计数器的计数值;C 0: 编码器每周脉冲数;P 144: 倍频数;I: 减速机减速比。
在上下剪刃的合口位置处安装接近开关,把接近开关的信号作为位置计数器的清零信号。
飞剪操作说明(PLC2)
宣钢连轧中型工程调试及操作说明书2#PLC冷床区系统目录附件1 2#PLC的I/O表附件2 2#PLC的OS画面表附件3 2#PLC的报警表冷床输入辊道(M001)控制设备1(9AOC):——操作开关SAE2,冷床输入辊道“前进/后退”控制设备2(4AOS):——操作开关4SAE,冷床输入辊道“前进/后退”控制设备3(4CS):——操作按钮M001,冷床输入辊道“前进/后退”操作说明:正常生产时,冷床输入辊道应置于自动运行方式。
◆手动操作:1.操作箱9AOC上旋钮开关“SAE13”打到“机旁”位,通过操作开关“SAE2”控制冷床输入辊道“前进/后退”。
2.操作箱9AOC上旋钮开关“SAE13”打到“集中”位,操作台4AOS 上旋钮开关“1SAE”打到“手动”位,通过操作开关4SAE,控制冷床输入辊道“前进/后退”。
3.操作箱9AOC上旋钮开关“SAE13”打到“集中”位,操作台4AOS 上旋钮开关“1SAE”打到“自动”位,通过操作按钮M001,控制冷床输入辊道“前进/后退”。
◆自动操作:操作台4AOS上旋钮开关“1SAE”打到“自动”位,当系统收到“全线启动”或“模拟扎制”命令,冷床输入辊道自动按设定的速度运行。
4CS上有此段辊道的速度设定。
在4CS上已设定此段辊道的提速比、摩擦系数输入辊道拨入装置(M002)控制设备1(9AOC):——操作开关SAE1,输入辊道拨入装置“前进/后退”控制设备2(4CS):——操作按钮M002,输入辊道拨入装置“前进/后退”操作说明:正常生产时,输入辊道拨入装置应置于自动运行方式。
◆手动操作:1.操作箱9AOC上旋钮开关“SAE13”打到“机旁”位,通过操作开关“SAE1”控制输入辊道拨入装置“前进/后退”。
操作箱9AOC上旋钮开关“SAE13”打到“集中”位,通过操作按钮M002,控制输入辊道拨入装置“前进/后退”。
◆自动操作:操作台4AOS上旋钮开关“1SAE”打到“自动”位,系统自动控制输入辊道拨入装置运行。
飞剪技术PLC.(DOC)
(3)在30°位置时,剪刃制动的切削刃,当剪刃到达300°处前必须停止制动,制动角的电气设计人员根据实际情况确定。
(4)制动结束后,要求剪刃回到等待位置。如果剪刃超过等待位置停下就要求电机反转,如果剪刃在等待前面的位置停止剪刃将继续向前旋转。
2.4系统总体方案确定
2015年全国大学生西门子杯工业自动化挑战赛工程设计文件
运动控制赛项
参赛队伍名称:XXXXXXXX
参赛学校名称:XXXXXXXX
年月日
一、方案设计依据、范围及相关标准
1、设计依据:
飞剪机是冶金板材行业最重要的装备之一,也是我国长期以来一直引进的重要的冶金设备,飞剪机是指横向剪切运动轧件,并满足用户定尺要求的一种设备。
四、控制系统选型与系统连接
控制系统选型
4.1直流调速器选型
直流调速器做为直流电动机调速设备,主要有电机、脉宽、可控硅直流调速器等。一般由不同的模块组成,直流调速器有整流电路、触发电路、电源电路于一个设备,器件采用竖直分布和使用高集成的控制元器件,具有集成度高,重量轻的优点,调试方便等特点,并结合直流电机安装在一起可以形成完整的直流电动机,同时拥有了调速器和直流电机的优良特性[7]。综合棒材飞剪中各方面的因素以及I311实验室调试的工作,本次设计采用6RA70直流调速器做为飞剪机控制系统的调速装置。
4.1.1 6RA70直流调速器
6RA70系列全数字整流调节器结构紧凑,相比6RA24,在机械设计和软件上6RA70的特点都有了很大的进步,使用了与西门子6SE70系列产品一致的控制箱,机械布局更加的紧凑和实用,模块可以根据控制需求进行自由选配。输入电压为三相交流电,电压大小同直流调速器的功率相关,可向直流电动机的电枢和励磁供电,电枢整流桥是三相全控桥,这样可以使电动机换向更加自然,通过交流侧的电流互感器可得到电枢电流。所有的控制,调节,控制和附加功能由微处理器实现,通过Drive monitor软件可以对速度调节系统的重要参数设定和实际速度的监控,并可通过模拟量给定电动机速度和反馈速度。使用Profibus-DP总线网络来与PLC通讯,可以把PLC的控制字发送到调速器以及将调速器的状态字反馈到PLC上。
基于PLC的高精度飞剪控制系统
基于PLC的高精度飞剪控制系统作者:王克亮来源:《中小企业管理与科技·上中下旬刊》 2015年第9期王克亮北方工业大学,北京森源东标电气有限公司北京100144摘要轧钢过程中,飞剪系统控制水平的高低对于提升轧钢行业的技术水平具有重要作用,本文将就PLC在飞剪系统中的应用展开说明。
关键词 PLC;飞剪;控制系统;精度在线材轧制过程中,对钢坯的要求较高,因而钢坯头部(或尾部)的不规则部分以及温度低的部分需要通过剪切去除,以确保轧制工序的顺利进行。
就我国当前控制系统的剪切水平而言,剪切定位不精确、运行期间稳定性差、剪切速度不高等问题还普遍存在,影响了我国线材轧制水平的提高。
随着科学技术的不断提升,可编程控制系统(PLC)在工业、机械制造等多个领域得到广泛应用,在提升制造行业的可靠性和专业性方面具有巨大的优势。
如可利用PLC 提升飞剪控制精准度,是本文主要解决的问题。
1 飞剪控制系统组成及控制1.1 飞剪系统介绍高线飞剪多采用回转剪,剪切时速度快、剪切轧件半径小。
轧件以一定的速度进入,经两侧热检后,进入设在第12 号和底13 号机架之间的飞剪。
剪机根据上游发布的信号设定剪切长度,利用专业的计算软件计算出剪切周期,剪机按照预设周期运行,完成对轧件的剪切。
1.2 飞剪控制系统1.2.1 组成飞剪控制系统包括两台PLC,其中主控PLC 的型号为GE 90-30,用以采集轧线信息的PLC 型号为90-70,两台机器通过工业以太网进行连接。
主控PLC 框架中包括六个模块,分别为电源模块、364CPU 模块、轴定位模块、高速计数器模块、数字量输入模块和输出模块。
轧件剪切前机架编码器信号计数、用以捕捉轧件头尾的热金属检测器信号的处理工作是由高速计数器模块完成的。
剪刀机电机转速、夹送棍电机转速、剪刀机角度等参数的控制由轴定位模块输出和完成。
飞剪参数的设置、飞剪运行的监控可通过触摸屏完成,一般触摸屏选用GP 系列的工业触摸屏,由电源模块上的兼容串行接口与PLC 进行通讯;剪前机架的编码器信号经过编码分配器时,将信号分为几部分,其中一路进入飞剪控制PLC,用来计算轧件的运行速度;同时,经过飞剪传动电机编码器处理的信号再次分配,一部分进入PLC用来计算飞剪角度的控制,另一路用来传动装置闭环控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6RA70直流调速装置使用了微处理器技术,其主要特点就是操作非常简单,运行可靠、灵活。对装置进行设置均可通过参数设定进行,为了让调速器快速运行起来可通过PC进行参数设定,也可通过PMU进行手动参数设定操作,但是这样的操作会相对复杂。同时还可实现:自动测试和报警显示,以减少维修时间;可以设置的参数将迅速备份卡具有特殊的价值,简化了管理;可重复设定,减少因操作技巧差异所造成的影响;速度调节器、电枢电流和励磁电流的自动调整,使整流器能快速、稳定地起动,控制面板中存有报警状态及诊断信息,能对故障进行快速分析。SIMOREG DC-MASTER在工业领域有着良好的经济性,开环和闭环控制被集成到系统中,具有高度的抗干扰。
3.2程序流程图
确定整个系统软件设计思路之后,就开始编写梯形图程序。为了编写程序时清晰的思路,明确下一步该如何编写程序,节省了整个控制程序的编写时间,因此设计程序的流程图就很有必要。程序流程图如下:
(1)系统主程序流程式程序流程图,如图所示。
四、控制系统选型与系统连接
控制系统选型
4.1直流调速器选型
直流调速器做为直流电动机调速设备,主要有电机、脉宽、可控硅直流调速器等。一般由不同的模块组成,直流调速器有整流电路、触发电路、电源电路于一个设备,器件采用竖直分布和使用高集成的控制元器件,具有集成度高,重量轻的优点,调试方便等特点,并结合直流电机安装在一起可以形成完整的直流电动机,同时拥有了调速器和直流电机的优良特性[7]。综合棒材飞剪中各方面的因素以及I311实验室调试的工作,本次设计采用6RA70直流调速器做为飞剪机控制系统的调速装置。
3.1系统的软件设计思路
对于棒材飞剪机控制系统,我的程序设计思路主要是先编写程序功能块,然后在主程序里面调用各功能块的方式来实现的。根据任务书的要求,系统工作模式可分为:自动运行模式和手动运行模式。本次设计使用的是西门子PLC的专门编程软件SIMATIC Manager,安装后默认有梯形图、功能块和语句表三种编程语言。基于自己在S7-200编程上面的基础,曾使用梯形图完成四层电梯的程序设计,最终选择用梯形图语言编程。梯形图编程具有层次感,很好的易读性,清晰明了。该系统的程序架构是:一个主程序,五个功能子程序。
(5)用实验平台模拟实现棒材飞剪机工作过程,设计操作界面及相应程序,并利用Wincc记录数据。
3、设计要求、标准:
(1)飞剪机的剪刃在剪切轧件时,要同轧件保持相对静止。剪刃要同时完成对轧件的剪切和移动,并且在水平方向的分速度应与轧件运行速度相等。
(2)要求飞剪机根据不同的轧件厚度和轧件形状,自动将剪刃间的间隙和重叠量调节到合适的值,从而确保剪切工艺正常,避免发生堵钢事件。
一般由不同的模块组成直流调速器有整流电路触发电路电源电路于一个设备器件采用竖直分布和使用高集成的控制元器件具有集成度高重量轻的优点调试方便等特点并结合直流电机安装在一起可以形成完整的直流电动机同时拥有了调速器和直流电机的优良特性7
2015年全国大学生西门子杯工业自动化挑战赛工程设计文件
运动控制赛项
参赛队伍名称:XXXXXXXX
二、系统分析(包括甲方需求分析、对象特性分析、系统安全分析等)
1、需求分析:
对于我们来说,我们还是主要提供程序,让PLC机器能够正常工作,实现工业生产。对于棒材飞剪机控制系统,我们的程序设计思路主要是先编写程序功能块,然后在主程序里面调用各功能块的方式来实现的。软件的核心问题是要对各种检测信号进行及时准确地判断以及对相应的设备进行控制,软件程序主要由轧线信号及处理、夹送辊操作、飞剪驱动模块、头部剪切操作、尾部剪切操作、单剪切、报警等模块组成,实现对信号的接收、分析、处理、控制、启动、制动等一系列操作。
(2)剪刃在336.5°时切入轧件。
(3)在30°位置时,剪刃制动的切削刃,当剪刃到达300°处前必须停止制动,制动角的电气设计人员根据实际情况确定。
(4)制动结束后,要求剪刃回到等待位置。如果剪刃超过等待位置停下就要求电机反转,如果剪刃在等待前面的位置停止剪刃将继续向前旋转。
2.4系统总体方案确定
参赛学校名称:XXXXXXXX
年月日
一、方案设计依据、范围及相关标准
1、设计依据:
飞剪机是冶金板材行业最重要的装备之一,也是我国长期以来一直引进的重要的冶金设备,飞剪机是指横向剪切运动轧件,并满足用户定尺要求的一种设备。
该设备主要包括:物料夹送辊、传感器、飞剪、飞剪角度追踪等。剪刃在水平位置时为飞剪的初始位置,剪刃在最低点时成为下死点,即剪切位置。
(3)要求剪切运动机械结构简单,减小剪切机构的运动惯性。当正在剪切时,速度变化小,还为飞剪机的频繁起动带来便利,可以提高飞剪机的剪切效率。
(4)自动生产,按照上述控制步骤,自动运行,自动追踪物料位置,实现物料的飞剪。
(5)在运行过程中,监测状态参数以及各种反馈信号等,确保飞剪过程稳定运行。并制定相应的安全策。
图4.3 S7-300系列PLC硬件组态模型
由于S7-300采用的是模块结构,所以在安装模块时必须按顺序放置。安装时,在机架的最左端总是安装电源模块,紧接着是CPU模块。如果需要另外加入接口模块,则安装在CPU模块的右侧,然后分别就是模拟量和数字量的信号模块,最后就是通信处理器。
4.2.3 S7-300 PLC的性能特点
(1)模块化可编程控制器系统,能满足中小规模的性能要求;
(2)由不同级别的CPU、各种功能模块和I/O模块可供选择,可以非常好的满足和适应自动化控制任务;
(3)集成功能很多所以它的功能非常强大;
(4)当控制任务增加时,可自由扩展;
(5)方便用户,有建议的无风扇设计;
(6)易于操作、编程、维护和服务;
(7)扩展温度范围从-25℃~+70℃;
(8)分布式结构简单、实用、多接口的网络容量,所以应用非常灵活;
(9)低成本的自动化系统解决方案。
系统连接图
六、经济效益分析
2、设计范围:
(1)熟悉飞剪的种类和剪刃剪切过程,确定整个系统的控制方案;
(2)熟习S7-300 PLC硬件构造、工作原理、指令系统和程序设计方法;
(3)基于S7-300 PLC配置外围硬件,使用AUTOCAD设计飞剪机控制系统的电气原理图和安装图,元器件主要参数计算及其选择;
(4)在控制方案下,设计满足棒材飞剪机在自动模式和手动模式的控制程序,以及指示灯显示程序;
PLC采用循环扫描工作方式,通电后就执行系统初始化程序,然后分别执行CPU自诊断、通信信息处理、与外部设备交换信息、执行用户程序、I/O信息处理,连续不断的反复执行这样的过程。这个过程实质上是按顺序循环扫描的过程,其工作过程如图4.1所示。
图4.1 PLC的工作过程
PLC的工作过程与CPU的操作方式有关。CPU有两种操作方式:STOP方式和RUN方式。PLC在执行用户程序时可分为三个阶段,(1)输入采样阶段、(2)程序执行阶段、(3)输出刷新阶段,如图4.2示。
2、对象特性分析:
飞剪本身的速度反馈由本机架电机编码器直接接入直流调速装置。当飞剪收到剪切信号时,飞剪开始均匀加速运转,在剪切位置或之前剪切速度达到给定值,通过编码器(或调速装置)计算的剪刃位置离开切出角,开始减速最终停到停止位,过程如图2.1所示。
图2.1剪刃周期剪切图
(1)剪刃从180°等待位置(电气人员可以根据实际情况,将等待位置定在90°到180°之间任何位置)开始加速到剪切速度。
4.2可编程控制器简介及选型
PLC采用了可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的,模拟的输入和输出,控制各种类型的机械或生产过程[11]。结合实验室调试工作的进行以及对飞剪控制系统设计的要求,本次设计选用西门子S7-300PLC。
4.2.1 PLC的工作原理
根据任务书的要求和对飞剪机工作原理的了解,设计自动模式和手动模式对飞剪机进行控制。在手动模式下,操作人员通过按下正向点动按钮对飞剪进行正向点动,按下反向点动按钮对飞剪进行反向点动,按下单次剪切按钮对飞剪进行单次剪切的测试。自动方式下,按照操作员设定的剪切参数,根据剪前热检信号自动计算剪切长度实现剪切功能。用指示灯显示不同的工作信号,以便给操作员进行操作提醒,明确飞剪机所在的工作状态。
按照以上的控制思路,可以确定好棒材飞剪机系统的总体设计思路:使用可编程逻辑控制器,实现飞剪工作过程的逻辑控制功能;利用变频器控制直流电机的启停式飞剪剪切过程,以满足飞剪的动态剪切过程;利用WinCC组态软件的人机界面设计,实现工作状态实时监测。
三、控制系统设计(包括控制逻辑、控制回路、控制算法等的选择,开机、停机等控制逻辑以流程图表达)
图4.2 PLC用户程序的工作过程
4.2.2 S7-300 PLC的硬件模块
S7-300是模块化PLC体系,可以满足中等性能控制系统的要求。S7-300 PLC由以下部分组成:机架(RACK)、电源模块(PS)、中央处理单元模块(CPU)、接口模块(IM)、信号模块(SM)、功能模块(FM)和通信处理器(CP)[11]。如图3.3所示。
4.1.3 6RA70直流调速器的应用
6RA70直流调速器的推出,由于其能够满足工业自动化对电气传动系统的越来越高的性能要求,并广泛的应用于各种工业领域中。例如加工制造业以及冶金行业中的轧机主传动系统,飞剪机剪切机构,校直机等。6RA70直流调速器的启停特性能够很好的满足连续启停工作制的飞剪机,有效的提高了剪切精度。
4.1.1 6RA70直流调速器
6RA70系列全数字整流调节器结构紧凑,相比6RA24,在机械设计和软件上6RA70的特点都有了很大的进步,使用了与西门子6SE70系列产品一致的控制箱,机械布局更加的紧凑和实用,模块可以根据控制需求进行自由选配。输入电压为三相交流电,电压大小同直流调速器的功率相关,可向直流电动机的电枢和励磁供电,电枢整流桥是三相全控桥,这样可以使电动机换向更加自然,通过交流侧的电流互感器可得到电枢电流。所有的控制,调节,控制和附加功能由微处理器实现,通过Drive monitor软件可以对速度调节系统的重要参数设定和实际速度的监控,并可通过模拟量给定电动机速度和反馈速度。使用Profibus-DP总线网络来与PLC通讯,可以把PLC的控制字发送到调速器以及将调速器的状态字反馈到PLC上。