机械原理(西工大)最全课后习题答案
西北工业大学机械原理课后答案第5章

第五章 机械的效率和自锁题5-5解: (1)根据己知条件,摩擦圆半径 m r f v 002.001.02.0=⨯==ρ ︒==53.8arctan f φ 计算可得图5-5所示位置︒=67.45α ︒=33.14β (2)考虑摩擦时,运动副中的反力如图5-5所示。
(3)构件1的平衡条件为:()ρα2sin 211+=AB R l F M()[]ρα2sin 2321+==AB R R l M构件3的平衡条件为:034323=++R R 按上式作力多边形如图5-5所示,有()()φβφ--︒=+︒90sin 90sin 323F F R(4)()()()φραφβφφβcos 2sin cos cos 90sin 1233++=--︒=AB R l M F F ()αβs i n c o s 130AB l M F = (5)机械效率:()()91.09889.09688.007553.09214.007153.0cos cos 2sin cos sin 303=⨯⨯⨯=++==φβραφβαηAB AB l l F FF R 12F R 41图5-5F F R 21F R43题5-2解: (1)根据己知条件,摩擦圆半径 22vf d =ρ 11a r c t a n f =φ 22a r c t a n f =φ 作出各运动副中的总反力的方位如图5-2所示。
(2)以推杆为研究对象的平衡方程式如下:∑=0xF 0cos cos sin 232132112=''-'+φφφR RR F F F ∑=0yF0sin sin cos 232132112=''-'--φφφR RR F F G F ∑=0CM()0c o s c o s s i n c o s 2s i n 1122232232112=⋅⋅-⋅''+⋅''+++θφφφφe F d F l F d Gl b F R R R R(3)以凸轮为研究对象的平衡方程式如下:h F M R ⋅=12 ()11cos tan sin cos φφθθρe r e h +++=(4)联立以上方程解得()[]21tan cos 21tan sin cos φθφθθρle e r e G M -+++=θc o s 0Ge M = ()()120tan sin cos tan cos 21cos φθθρφθθηe r e c l e e M M +++-==讨论:由于效率计算公式可知,φ1,φ2减小,L 增大,则效率增大,由于θ是变化的,瞬时效率也是变化的。
机械原理第2、3、4、6章课后答案西北工业大学

机械原理第2、3、4、6章课后答案西北工业大学第二章机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-?-?=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
题2-11讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
西北工业大学机械原理课后答案第3章-1
解法一:
速度分析:先确定构件3得绝对瞬心P36,利用瞬心多边形,如图(b)
由构件3、5、6组成得三角形中,瞬心P36、P35、P56必在一条直线上,由构件3、4、6组成得三角形中,瞬心P36、P34、P46也必在一条直线上,二直线得交点即为绝对瞬心P36。
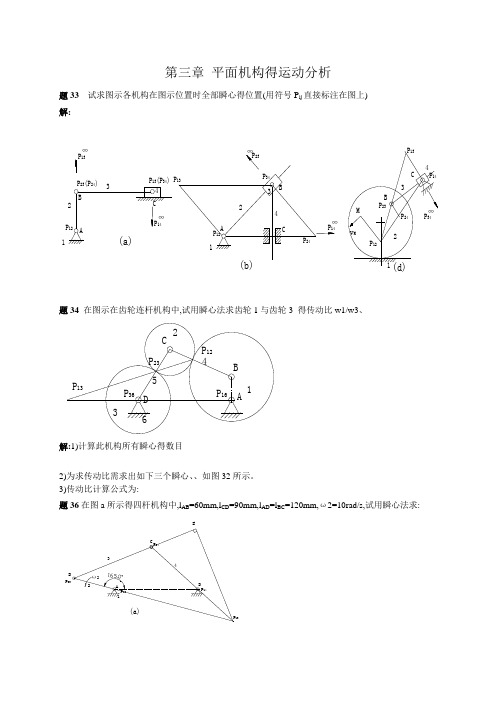
第三章平面机构得运动分析
题33试求图示各机构在图示位置时全部瞬心得位置(用符号Pij直接标注在图上)
解:
题34在图示在齿轮连杆机构中,试用瞬心法求齿轮1与齿轮3得传动比w1/w3、
解:1)计算此机构所有瞬心得数目
2)为求传动比需求出如下三个瞬心、、如图32所示。
3)传动比计算公式为:
题36在图a所示得四杆机构中,lAB=60mm,lCD=90mm,lAD=lBC=120mm,ω2=10rad/s,试用瞬心法求:
解:1)速度分析:
以F为重合点(F1、F5、、F4)有速度方程:
以比例尺速度多边形如图37 (b),由速度影像法求出VB、VD
2)加速度分析:以比例尺
有加速度方程:由加速度影像法求出aB、aD
题316在图示得凸轮机构中,已知凸抡1以等角速度转动,凸轮为一偏心圆,其半径,试用图解法求构件2得角速度与角加速度。
4)当时,P13与C点重合,即AB与BC共线有两个位置。作出得两个位置。
量得
题312在图示得各机构中,设已知各构件得尺寸、原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3上C点得速度及加速度。
解:a)速度方程:
加速度方程:
b)速度方程:
加速度方程:
c)速度方程:
加速度方程:
题314在图示得摇块机构中,已知lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm。曲柄以等角速度ω1=10rad/s回转,试用图解法求机构在φ1=45°位置时,点D与点E得速度与加速度,以及构件2得角速度与角加速度。
机械原理第2、3、4、6章课后答案西北工业大学(第七版)

第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)5364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
西北工业大学机械原理课后答案第7章-1
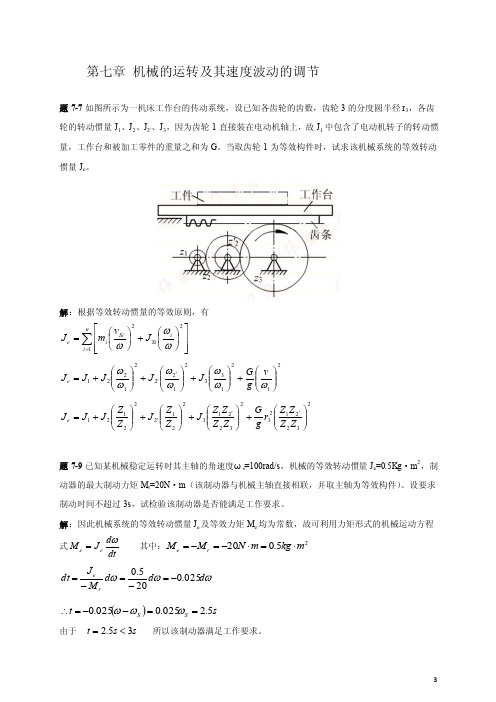
第七章 机械的运转及其速度波动的调节题7-7如图所示为一机床工作台的传动系统,设已知各齿轮的齿数,齿轮3的分度圆半径r 3,各齿轮的转动惯量J 1、J 2、J 2`、J 3,因为齿轮1直接装在电动机轴上,故J 1中包含了电动机转子的转动惯量,工作台和被加工零件的重量之和为G 。
当取齿轮1为等效构件时,试求该机械系统的等效转动惯量J e 。
解:根据等效转动惯量的等效原则,有∑=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=ni i Si Si i e J v m J 122ωωω 212133212221221⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+=''ωωωωωωωv g G J J J J J e 2322123232213221222121⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+='''Z Z Z Z r g G Z Z Z Z J Z Z J Z Z J J J e 题7-9已知某机械稳定运转时其主轴的角速度ωs =100rad/s ,机械的等效转动惯量J e =0.5Kg ·m 2,制动器的最大制动力矩M r =20N ·m (该制动器与机械主轴直接相联,并取主轴为等效构件)。
设要求制动时间不超过3s ,试检验该制动器是否能满足工作要求。
解:因此机械系统的等效转动惯量J e 及等效力矩M e 均为常数,故可利用力矩形式的机械运动方程式dtd J Me e ω= 其中:25.020m kg m N M M r e ⋅=⋅-=-= ωωωd d d M J dt r e 025.0205.0-=-=-= ()s t S S 5.2025.0025.0==--=∴ωωω由于 s s t 35.2<= 所以该制动器满足工作要求。
题7-11 在图a 所示的刨床机构中,已知空程和工作行程中消耗于克服阻抗力的恒功率分别为P 1=367.7W 和P 2=3677W ,曲柄的平均转速n=100r/min ,空程中曲柄的转角φ1=120°。
西北工业大学机械原理课后标准答案第3章

根据aC=aB+anCB+atCB=aD+anCD+atCD
继续作图,则矢量p` c`就代表了aC.则求得
φ1=26.4°
φ2=226.6°
3-8机构中,设已知构件的尺寸及点B的速度vB(即速度矢量pb),试作出
各机构在图示位置时的速度多边形。
答:
(10分)
(b)
答:
答:
3—11速度多边形和加速度多边彤有哪些特性?试标出图中的方向。
答速度多边形和加速度多边形特性参见下图,各速度方向在图中用箭头标出。
3-12在图示的机构中,设已知构件的尺寸及原动件1的角速度ω1(顺时针),试用图解法求机构在图示位置时C点的速度和加速度。
aD=μap`d`=0.6 4m/S2
aE=μap`e`=2.8m/s2
α2=atC2B/lBC=μan`2C`2/lBC=8.36rad/s2(顺时针) i
3- l5在图(a)示的机构中,已知lAE=70 mm,;lAB=40mm,lEF=60mm,
lDE==35 mm,lCD=75mm,lBC=50mm.原动件以等角速度ω1=10rad/s回转.试以图解法求机构在φ1=50。位置时.点C的速度Vc和加速度ac
解:1)速度分析:以F为重合点.有
vF4=vF5=vF1+vF5F1
以μl作速度多边形图如图(b)得,f4(f5)点,再利用速度影像求得b及d点
根据vC=vB+vCB=vD+vCD继续作速度图,矢量pc就代表了vC
2)加速度分析:根据aF4= anF4+ atF4= aF1+ akF5F1+ arF5F1
机械原理第2、3、4、6章课后答案西北工业大学(第七版)
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
题2-11讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
西北工业大学机械原理课后答案第6章-1
第六章 机械的平衡题6-5 图示为一钢制圆盘,盘厚b=50mm ,位置Ⅰ处有一直径φ=50mm 的通孔,位置Ⅱ处是一质量m 2=0.5kg 的重块。
为了使圆盘平衡,你在圆盘上r=200mm 处制一通孔。
试求此孔德直径与位置。
(钢的密度γ=7.8g/cm 3)解:解法一:先确定圆盘的各偏心质量大小kg b m 7648.08.75454221-=⨯⨯⨯-=-=πγφπ kg m 5.02=设平衡孔质量γπb d m b 42-= 根据静平衡条件 02211=++b b r m r m r mmm kg r m r m r m b b b ⋅=︒-︒-=52.32210cos 135cos cos 2211θmm kg r m r m r m b b b ⋅=︒-︒-=08.104210sin 135sin sin 2211θmm kg r m r m r m b b b b b b b b ⋅=+=04.109)cos ()sin (22θθ由mm r b 200= kg m b 54.0=∴ mm b m d b2.424==γπ 在位置b θ相反方向挖一通孔︒=︒+︒=︒+⎪⎪⎭⎫⎝⎛=︒+-66.28218066.72180cos sin 1801b b b bb b b r m r m tg θθθ解法二:由质径积矢量方程式,取 mmmmkg W ⋅=2μ 作质径积矢量多边形如图6-5(b ) 平衡孔质量 kg r W m bbW b 54.0==μ 量得 ︒=6.72b θ题6-7在图示的转子中,已知各偏心质量m 1=10kg ,m 2=15kg ,m 3=20kg ,m 4=10kg ,它们的回转半径分别为r 1=40cm ,r 2=r 4=30cm ,r 3=20cm ,又知各偏心质量所在的回转平面的距离为l 12=l 23=l 34=30cm ,各偏心质量的方位角如图。
若置于平衡基面Ⅰ及Ⅱ中的平衡质量m b Ⅰ及m b Ⅱ的回转半径均为50cm ,试求m b Ⅰ及m b Ⅱ的大小和方位。
机械原理第七版西北工业大学课后习题答(1-8章)
机械原理作业集答案详解 第二章平面机构的结构分析题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
机械原理习题答案
机械原理习题答案篇一:机械原理_课后习题答案第七版《机械原理》作业题解第二章机构的构造分析F=3n-2pl-ph =3×-2×-1=0 34 F = 3n ? (2pl + ph )= 3 ×4 ? (2 ×5 + 1) = 17 438 5 2 9 1-1' F = 3n ?(2pl + ph ? p') ? F'= 3 ×8 ? (2 ×10 + 2 ? 0) ?1= 1篇二:机械原理第七版西北工业大学习题答案(特别全答案详解).doc第二章平面机构的构造分析题2-1 图a所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以到达冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构管此机构有4个活动件,但齿轮1和凸轮2是固装能作为一个活动件,故n?3 pl?3 ph?1F?3n?2pl?ph?3?3?2?4?1?0的自由度。
尽在轴A上,只原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
. . 第二章 平面机构的结构分析
题2-1 图a所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。 解:1)取比例尺,绘制机构运动简图。(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A上,只能作为一个活动件,故 3n 3lp 1hp
01423323hlppnF 原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。 分析:因构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架。故需增加构件的自由度。 3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。 (1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。 (2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。 (3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)
54364(a)5325
215436426(b)321
讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引
入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。用一个高副代替一个低副也可以增加机构自由度,如图2-1(d)所示。
题2-2 图a所示为一小型压力机。图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O连续转动。在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C轴上下摆动。同时,又通过偏心轮1’、连杆2、滑杆3使C轴上下移动。最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。试绘制其机构运动简图,并计算自由度。 解:分析机构的组成: 此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。故 解法一:7n 9lp 2hp 12927323hlppnF 解法二:8n 10lp 2hp 局部自由度 1F
11210283)2(3FpppnFhl .
. 题2-3如图a所示为一新型偏心轮滑阀式真空泵。其偏心轮1绕固定轴A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。当偏心轮1按图示方向连续转动时,可将设备中的空气按图示空气流动方向从阀5中排出,从而形成真空。由于外环2与泵腔6有一小间隙,故可抽含有微小尘埃的气体。试绘制其机构的运动简图,并计算其自由度。 解:1)取比例尺,绘制机构运动简图。(如图题2-3所示) ABC1234题2-3 2) 3n 4lp 0hp 10423323hlppnF 题2-4 使绘制图a所示仿人手型机械手的食指机构的机构运动简图(以手指8作为相对固定的机架),并计算其自由度。 解:1)取比例尺,绘制机构运动简图。(如图2-4所示) 2) 7n 10lp 0hp 101027323hlppnF 题2-5 图a所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。若以颈骨1为机架, 试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。 解:1)取比例尺,绘制机构运动简图。大腿弯曲90度时的机构运动简图如虚线所示。(如图2-5所示) 2) 5n 7lp 0hp 10725323hlppnF
题2-6 试计算如图所示各机构的自由度。图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑块);图c为一精压机机构。并问在图d所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?
题2-4题2-5.
. 解: a) 4n 5lp 1hp
11524323hlppnF b) 解法一:5n 6lp 2hp 12625323hlppnF 解法二:7n 8lp 2hp 虚约束0p 局部自由度 2F 12)0282(73)2(3FpppnFhl
c) 解法一:5n 7lp 0hp 10725323hlppnF 解法二:11n 17lp 0hp
虚约束263010232nppphl 局部自由度 0F 10)20172(113)2(3FpppnFhl
d) 6n 7lp 3hp 13726323hlppnF 齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。 齿条7与齿轮5的啮合为高副(因中心距未被约束,故应为双侧接触)将提供2个约束。
题2-7试绘制图a所示凸轮驱动式四缸活塞空气压缩机的机构运动简图。并计算其机构的自由度(图中凸轮1原动件,当其转动时,分别推动装于四个活塞上A、B、C、D处的滚子,使活塞在相应得气缸内往复运动。图上AB=BC=CD=AD)。 解:1)取比例尺,绘制机构运动简图。(如图2-7(b)所示)
2) 此机构由1个凸轮、4个滚子、4个连杆、4个活塞和机架组成。凸轮与4个滚子组成高副,4个连
杆、4个滚子和4个活塞分别在A、B、C、D处组成三副复合铰链。4个活塞与4个缸(机架)均组成移动副。 解法一: 13n 17lp 4hp 虚约束: 因为ADCDBCAB,4和5,6和7、8和9为不影响机构传递运动的重复部分,与连杆10、11、12、13所带入的约束为虚约束。机构可简化为图2-7(b) 重复部分中的构件数10n 低副数
17lp 高副数
3hp 局部自由度3F
43103317232nppphl
局部自由度 4F )44172(133)2(3FpppnFhl
解法二:如图2-7(b) 局部自由度 1F
1)0132(33)2(3FpppnFhl
题2-8 图示为一刹车机构。刹车时,操作杆1向右拉,通
1O3
2AE
(b).
. 过构件2、3、4、5、6使两闸瓦刹住车轮。试计算机构的
自由度,并就刹车过程说明此机构自由度的变化情况。(注:车轮不属于刹车机构中的构件。) 解:1)未刹车时,刹车机构的自由度 6n 8lp 0hp
20826323hlppnF 2)闸瓦G、J之一刹紧车轮时,刹车机构的自由度 5n 7lp 0hp
10725323hlppnF 3)闸瓦G、J同时刹紧车轮时,刹车机构的自由度 4n 6lp 0hp
00624323hlppnF
题2-9 试确定图示各机构的公共约束m和族别虚约束p″,并人说明如何来消除或减少共族别虚约束。
解:(a)楔形滑块机构的楔形块1、2相对机架只能在该平面的x、y方向移动,而其余方向的相对独立运动都被约束,故公共约束数4m,为4族平面机构。
35ppi
5113452466miipminmF
3352660iipnF 将移动副改为
圆柱下刨,可减少虚约束。
A题(b) 由于齿轮1、2只能在平行平面内运动,故为公共约束数3m,为3族平面机构。
25p 14p
51223236mihlippnpminmF
241522660iipnF 将直齿
轮改为鼓形齿轮,可消除虚约束。 (c) 由于凸轮机构中各构件只能在平行平面内运动,故为3m的3族平面
机构。
35p
14p 1F
515353366miipFpminmF
2114353660FipnFi
将平面高副改为空间高副,可消除虚约束。
题2-10 图示为以内燃机的机构运动简图,试计算自由度,并分析组成此机构的基本杆组。如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前者不同。 解:1)计算此机构的自由度 7n 10lp 0hp
101027323hlppnF 2)取构件AB为原动件时机构的基本杆组图2-10(b)所示。此机构为二级机构。 3)取构件GE为原动件时机构的基本杆组图2-10(c)所示。此机构为三级机构。