双馈电机控制模型的建立与仿真
双馈风力发电的矢量控制策略-电机及其系统与仿真资料

双馈风力发电的矢量控制策略双馈电机在结构上与三相绕线式异步电机类似,其定子和转子均安放三相对称绕组,都可以与电网进行能量的交换。
其定子绕组直接接入工频电网,转子绕组通过双馈变流器与电网连接。
转子绕组连接于一个频率、相位、幅值均可调的三相电源激励,转子通入励磁电流产生旋转磁场,再加上转子的转速在气隙中产生一个同步旋转磁场。
通过控制输入转子绕组的电流,不仅可以保证电机定子侧输出的电压和频率保持与电网电压一致,而且还可以调节双馈电机定子侧的功率因数。
稳态运行时,双馈变流器根据所检测的电机转速调节流入双馈电机转子绕组的励磁电流频率以保证定转子电流所产生的旋转磁场在空间上保持相对静止,实现定子侧感应电势的频率与电网频率相同,以实现双馈型风力发电系统的变速恒频运行。
双馈风力发电的系统原理图如图1所示。
图1双馈风力发电系统原理图双馈变换器目前的多采用两电平双PWM变换器,其结构图如图2所示1双馈发电机的数学模型1.1三相坐标轴系下数学模型定子绕组采用发电机惯例,定子电流流出为正,转子绕组采用电动机惯例,转子电流流入为正。
则双馈发电机在三相静止坐标轴系下的模型为图3所示:图3三相坐标轴系下双馈发电机模型针对此模型可以得到三相坐标轴系下电压方程、磁链方程、运动方程和转矩方程为:电压方程:(1)转子侧电压方程:% =时心+切』曲'% =尽心+纲/山% = 1<見+如(山(2)定子侧电压方程:+ 叽 45=「恥\+叽4U a1、U bl 、U cl 、U a2、U b2、U c2分别表示定转子电压,下标为1表示为定子侧, 为2表示转子侧;幅1、帕、%1、幅2、幅2、恢表示定、转子侧磁链;i al 、心、 i cl 、i a2、i b2、i c2为定子,转子相电流;R l 、R 2为定子,转子绕组的等效电阻。
(3) 磁链方程:其中-0・5S-°皿加L\\ =755&川+ S -0验i -- 0・心&川+厶1丿'+ 厶 2-0-5^2-。
双馈风电机的控制仿真
2020.05科学技术创新双馈风电机的控制仿真耿秀明(内蒙古电子信息职业技术学院,内蒙古呼和浩特010011)1概述经济的飞速发展带动了各行各业的发展,电能需求的日益增长与发电容量不足的矛盾显得越来越明显。
在目前能源紧缺与环境日益恶化的全球背景下,节能环保的可再生能源的的发展受到了各国的高度重视。
从风能资源的形成来看,其具有典型的可再生性和无污染性,而且风能资源总量大,分布广,是清洁能源战略的重要选择路径之一[1]。
目前,我们所使用的电能中,火电,水电和核电占据了主要的部分[2]。
由于制造、控制技术的发展应用比较成熟,这类发电厂生产的电能能够稳定的供给运行,并变送供给公共电网进行输电配送。
在中国,火力发电的份额占有主导地位,火电厂排放的灰尘、C02等,是造成大气污染的主要来源,并且随着煤炭资源的过度开采,现有储备量也大幅度缩减。
在国家大力的新能源政策扶植下,我国的风电产业迅猛发展,并相继投产了很多大容量风电场[3]。
因风能资源的随机性和波动性,使发出的电能不稳定,造成大部分风电场不能并网运行。
目前双馈发电机是风电场的主要机型,研究双馈风电机对研究风电并网,解决并网电压不稳定问题具有较高的应用价值和研究基础。
2双馈风电机双馈风电机(DFIG )是风电场的主要机型[3],风力机通过连接机构带动双馈风电机转子转动,转子绕组通过变换器组与电网连接,通过调节控制转子转速获得最大风能捕获。
定子绕组与电网连接,发电系统根据转速的变化调节励磁电流的频率,实现电机的变速恒频运行[4]。
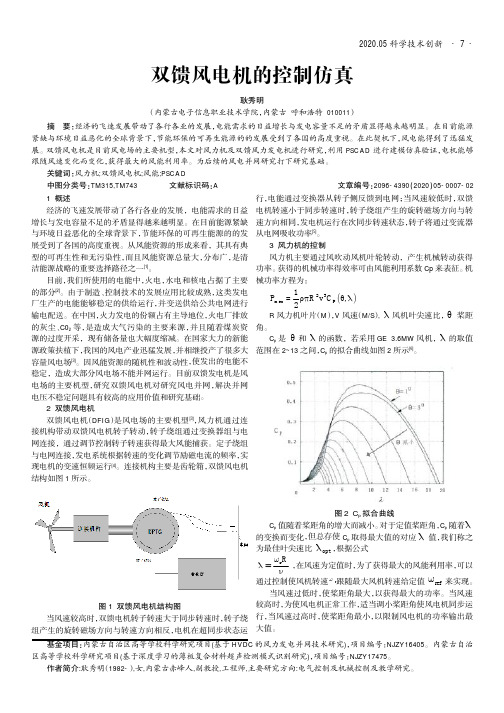
连接机构主要是齿轮箱,双馈风电机结构如图1所示。
图1双馈风电机结构图当风速较高时,双馈电机转子转速大于同步转速时,转子绕组产生的旋转磁场方向与转速方向相反,电机在超同步状态运行,电能通过变换器从转子侧反馈到电网;当风速较低时,双馈电机转速小于同步转速时,转子绕组产生的旋转磁场方向与转速方向相同,发电机运行在次同步转速状态,转子将通过变流器从电网吸收功率[5]。
级联式无刷双馈电机的建模与仿真

wi d g n r t n d ma n n e eai o i . o
Ke o d : b u h esd u l—e a hn :m ah . yW r s r s ls o byf m c ie d t e mai l d e;smuain -u cin tc a mo l i lt ;S fn t o o
2台 电机 定子 绕组 和转 子绕 组形成 的旋转 磁 场方 向
ie a e i ua e , whc po ie te h o ei l n s r m lt d ih rvd s h t e rt a c f u d t n a d s uain bo k frt ef rh rsu y o n a i n i lt lc o h u t u td o m o o h p l ain o hsk n fma hn n VS F ft e a pi t ft i id o c ie i C c o
Z HANG n z u Yu —h , XI ONG a g y Gu n -u
( iunUnvri f c n l y 0 0 2 , hn ) Ta a ies yo h o g 3 0 4 C ia y t Te o 摘 要 : 对级联 式 无刷 双 馈 电机 的 结构 与原 理 进
Ab t a t I h sp p r t e s r c u e a d p i cpe s r c : n t i a e , h t t r n r i l u n
双馈风电系统的建模仿真研究与设计

双馈风电系统的建模仿真研究与设计为了对双馈风电系统进行建模仿真研究和设计,需要考虑以下几个方面的内容:1.风机模型:风力发电机的模型通常由刚性转子、永磁同步发电机和转子侧的变频器组成。
确定风机的机械特性和电气特性,以及风速与输出功率之间的关系,这些参数可以通过实验或者已有的文献进行获得。
在仿真中,可以通过模拟风速和风机负载来测试系统的响应和性能。
2.变频器模型:变频器是双馈风电系统中非常重要的部分,它用于控制发电机的转速和电压。
为了进行仿真研究,需要构建变频器的电路模型,并确定其控制策略和参数。
常用的控制策略包括电压控制和转速闭环控制。
通过仿真可以测试不同的控制策略在不同工况下的性能。
3. 功率电子器件模型:双馈风电系统中包含多个功率电子器件,如变频器中的IGBT、MOSFET等。
需要建立这些器件的模型并确定其参数,例如电容和电感的数值。
这些模型可以通过电路仿真软件进行建立,例如PSCAD、MATLAB/Simulink等。
4.输电网模型:双馈风电系统需要将发电的电能输送到电网中。
因此,需要建立电网的模型,并考虑电网的稳定性和电气参数。
可以根据实际情况设置电网中的节点并确定节点的参数。
通过仿真可以测试风电系统在不同节点工况下的运行稳定性。
在进行双馈风电系统的建模仿真研究和设计时1.在建模过程中,需要准确获取系统参数,例如风机特性曲线、变频器控制参数等。
这些参数对于研究系统的性能和运行特性非常重要。
2.在仿真过程中,可以考虑不同的工况条件,例如不同的风速和负载情况。
通过测试系统在不同工况下的性能,可以评估系统的稳定性和效率。
3.在进行仿真研究时,可以采用不同的控制策略和算法,例如PID控制、模糊控制和最优控制等。
通过比较这些控制策略在系统性能上的差异,可以选择最优的控制方案。
总之,双馈风电系统的建模仿真研究和设计需要考虑风机模型、变频器模型、功率电子器件模型和输电网模型等方面的内容,并进行准确参数的设置和不同工况下的测试。
双馈发电机控制系统仿真实验指导书 (1)
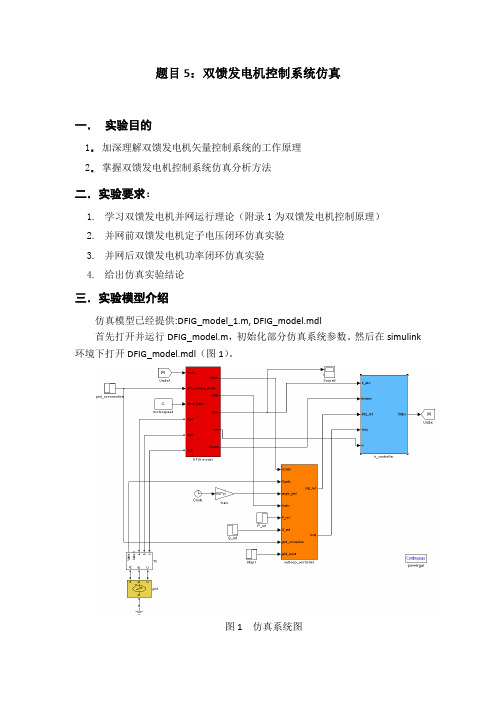
题目5:双馈发电机控制系统仿真一.实验目的1.加深理解双馈发电机矢量控制系统的工作原理2.掌握双馈发电机控制系统仿真分析方法二.实验要求:1.学习双馈发电机并网运行理论(附录1为双馈发电机控制原理)2.并网前双馈发电机定子电压闭环仿真实验3.并网后双馈发电机功率闭环仿真实验4.给出仿真实验结论三.实验模型介绍仿真模型已经提供:DFIG_model_1.m, DFIG_model.mdl首先打开并运行DFIG_model.m,初始化部分仿真系统参数。
然后在simulink 环境下打开DFIG_model.mdl(图1)。
图1 仿真系统图DFIG_model.mdl仿真模型内大致分为四部分1.grid(左下角)为电网电源。
2.DFIG model(左上红色)为双馈发电机模型部分3.Ir_controller(右上)为转子电流内环控制器4.outloop_controller (中间橘黄色)为外环控制器。
其余模块为测量及部分参数输入模块。
仿真过程中第1和第2部分内容不需要修改。
重点学习第3和第4部分。
在Ir_controller模块中(图2),左侧输入信号依次为Irabc(转子三相电流)、thetam(发电机转子角度)、Irdq_ref(转子电流给定值,此处为外环控制器输出)、Isdq(定子电流dq值)。
右侧输出信号为Urabc(转子电压,此处为转子电流环控制器输出,直接控制转子侧输出电源)。
双击Ir_controller进入模块内部,左侧模块为转子电流坐标变换模块(abc-dq,将三相转子电流转换为同步旋转坐标系下dq值),中间为转子电流控制器Ir_PI_controller,右侧为转子电压逆变换模块(将同步旋转坐标系下转子电压dq值转换为三相转子电压)。
此部分各模块细节可双击进入。
右上角Scope1和Scope2分别为Id,Iq的给定值和实际值。
图3为转子电流环控制器(对应理论说明中公式28)图2 Ir_controller模块图图3 转子电流环控制器在outloop_controller模块中,左侧输入依次分别为Usabc(定子侧三相电压),Ugabc(电网侧三相电压),angle_grid(电网电压相角),Isabc(定子侧三相电流),P_ref(有功功率给定值),Q_ref(无功功率给定值),grid_connection(并网信号),grid_reset(并网信号-用于积分器清零)。
基于PSCAD的双馈风力发电机的控制模式仿真研究

(3)
其中, Ls 、 Lr 、 Lm 为定、转子在 d 、 q 轴下的 等效电感和互感, s 为转差率, usd 、 usq 、 urd 、 u rq 、 isd 、 isq 、 ird 、 irq 分别为定、转子电压和电流的 d 、 q 轴分量, ω 为坐标系旋转角速度, p 为微分算子。 将旋转坐标系的 d 轴定向在定子磁链上,即为 双馈电机的定子磁链定向矢量控制。忽略定转子的 电阻和暂态过程,即有
Simulation Research on Control Modes of Doubly-Fed Wind Power Generator Based on PSCAD
Cai Zhi Liu Jianzheng Wang Jian Liu Shu (State Key Lab of Power Systems, Department of Electrical Engineering, Tsinghua University, Beijing 100084) Abstract Doubly fed induction generator (DFIG) used in MW-class variable speed constant frequency wind energy generation system can capture wind energy with the highest efficiency by using the stator flux oriented vector control method. Based on the wind turbine characteristics, the arithmetic of the control objective reference values is derived. It is shown three control modes can be used to realize maximum power point tracking which are speed-mode control, torque-mode control and power-mode control. Based on The dynamic and static performances of three control modes analyzed and compared, it is proposed the best control mode is power-mode control. The model of MW-class wind generation system was established by PSCAD in order to simulate the operational performance with wind speed variation. The results show the correctness of the conclusion. Key words:doubly fed induction generator;maximal wind energy tracking;speed-mode control; torque-mode control; power-mode contro
双馈电动机基于MATLAB的建模与仿真

建立电机状态方程的S 函数和仿真模)基于MATLAB的无刷双馈电机建模与仿真

第29卷 第6期湖 南 大 学 学 报 (自然科学版)V o1.29,N o.6 2002年12月Journal of H unan U niversity(N atural Sciences Editi on)D ec.2002文章编号:100022472(2002)0620071205基于M A TLA B的无刷双馈电机建模与仿真Ξ黄守道1,罗军波1,彭 晓2,王耀南1,林友杰1(1.湖南大学电气与信息工程学院,湖南长沙 410082;2.湖南工程学院电气工程系,湖南湘潭 411101) 摘 要:从无刷双馈电机(BD FM)的基本原理出发,利用电机的状态方程组,用M A TLAB S I NUL I N K中的S2Functi on函数模块,构造了无刷双馈电机数学仿真模型Λ仿真的结果分析表明了无刷双馈电机原理分析和数学仿真模型的正确性Λ关键词:无刷双馈电机;数学模型;仿真;M A TLAB S I M UL I N K中图分类号:TM34 文献标识码: AM odeling and Si m u lati on of B ru sh less Doub le2FedM ach ine Based on M A TLABHU AN G Shou2dao1,LU O Jun2bo1,PEN G X iao2,W AN G Yao2nan1,L I N You2jie1(1.Co llege of E lectrical and Info r m ati on Engineering,H unan U niv,Changsha 410082,Ch ina;2.D ep t of E lectrical,H unan Engineering Co llege,X iangtan 411101,Ch ina) Abstract:B ased on the p rinci p le of B ru sh less Doub ly2fed M ach ines(BD FM),the m ach ines’state equati on s w ere u tilized to con struct the si m u lati on m odel of BD FM w ith the si m u lati on b lock of S2functi on in the M A TLAB S I M UL I N K.T he si m u lati on re2 su lts validate the analyses of the p rinci p le and the si m u lati on system s of BD FM.Key words:BD FM;m athem atic m odel;si m u lati on;M A TLAB S I M UL I N K无刷双馈电机(B ru sh less Doub ly2Fed M ach ine,简称为BD FM)是一种结构简单,坚固可靠,异同步通用的电机,可在无刷情况下实行双馈运行Λ它具有以下显著的特点:降低了所需变频器的容量,可以调节系统的功率因数,可应用于交流调速传动系统和变速恒频恒压发电系统Λ国内外目前对BD FM的研究已从对电机结构的改进阶段发展到建立比较准确实用的数学模型[1~3],找到适合于BD FM的控制方法,先后提出了网络模型、d-q轴Ξ收稿日期:2001206220基金项目:湖南省科技攻关项目(99JGK2006);湖南省自然科学基金资助项目(01JJY2047)作者简介:黄守道(1962-),男,湖南长沙人,湖南大学副教授,在职博士Λ数学模型、同步数学模型及基于这3种模型的许多控制方法的阶段Λ但是,以往BD FM 的仿真程序大部分是用C 和FOR TAN 语言编写,大部分精力都要花在矩阵运算、微分方程的解法等子程序的编制和调试上Λ人机交互能力差,模型的动态编辑、修改都很不方便Λ本文以BD FM 的数学模型为基础,利用M A TLAB 的强大矩阵计算功能和S I M UL I N K 的交互式仿真集成环境,建立电机状态方程的S 2functi on 函数,从而完成对BD FM 的仿真研究Λ1 无刷双馈电机的工作原理及数学模型BD FM 的基本结构是一个定子、一个转子和一套公共磁路,定子上装有两套三相绕图1 旋转角速度F ig .1 Ro tating speed组,一套为功率绕组(主绕组),直接接至工频电源,另一套为控制绕组(副绕组),通过变频器接至工频电源Λ在两套绕组相序相反的情况下,功率绕组电流、控制绕组电流和转子电流所产生的旋转磁场如图1所示Λ图中Ξp ,Ξc为功率绕组、控制绕组产生的磁场旋转角速度,Ξr 为转子机械角速度ΖΞp r ,Ξcr 为这两绕组产生的磁场相对于转子的转速Λ根据文献[1],BD FM 的稳定转速为Ξr =(Ξp -Ξc ) (P p +P c ),通过改变变频器的输出电源频率来调节转速,可以实现无极调速Λ转速具体的表达式为 n =60(f p -f c )p p +p c(1)利用M A TLAB S I M UL I N K 中的S 2functi on 函数模块对BD FM 进行模拟仿真,首先要有BD FM 的数学模型或状态方程Λ为了建立BD FM 的通用数学模型,首先作如下假定:(1)磁路是线性的,不计饱和Λ(2)除P p 次和P c 谐波外,忽略其他谐波Ζ(3)不计2P p 极和2P c 极之间的直接耦合Λ在上述假设的基础上,BD FM 的转子速d q 0坐标系下的状态方程可写为1.1 电压方程式 U qspU dspU qscU dscU qrU d r =R sp +L sp D t P p Ξr L sp 00L m p D t P p Ξr L m p -P p Ξr L sp R sp +L sp D t 00-P p Ξr L m p L m p D t 00R sc +L sc D t P c Ξr D t -L m c D t P c Ξr L m c 00-P c Ξr L sc R c +L sc D t P c L m c D t L m c D t L m p D t 0-L m c D t 0R r +L r D t 00L m p D t 0L m c D t 0R r +L r D t・I qsp I dsp I qsc I dsc I qr I d r (2)式中P p ,R sp ,L sp ,L m p 为功率绕组的极对数、电阻、自感和与转子的互感;P c ,R sc ,L sc ,L m c 为控制绕组的极对数、电阻、自感和与转子的互感;R r ,L r ,Ξr 为转子电阻、自感和电机的机械角速度;U qsp ,U dsp ,U qsc ,U dsc ,U qr ,U d r ,I qsp ,I dsp ,I qsc ,I dsc ,I qr ,I d r ,均表示电压电流的瞬27 湖南大学学报(自然科学版) 2002年态值Ζ下标p 为功率绕组;c 为控制绕组;s 为定子侧;r 为转子侧;q ,d 为q ,d 轴分量;D t 为对时间的导数Ζ1.2 电磁转矩和运行方程式电磁转矩方程式如下 T e =P p L m p (I qsp I d r -I dsp I qr )-P c L m c (I qsc I d r +I dsc I d r )=T ep +T ec(3)机械运动方程如下 d Ξr d t =1 J (T e -T l -K d Ξr )(4)上述两式中J ,K d 为转子机械惯量、转动阻尼系数;T e ,T ep ,T ec 分别为总转矩、功率绕组产生的转矩和控制绕组产生的转矩,T l 为负载转矩Ζ方程(2),(3),(4)构成了BD FM 的数学模型,利用M A TAB 中的符号运算功能,可以求解式(2),得出电流状态变量的微分表达式及角速度的微分表达式Ζ2 建模仿真样机的基本参数如下主绕组的极对数、自感、互感和电阻分别为P p =3,L sp =66.5m H ,L m p =839ΛH ,P sp =0.6728;副绕组的极对数、自感、互感和电阻分别为P c =1,L sc =378.4m H ,L m c =3.195m H ,R sc =0.9248;转子电感、电阻、转动惯量、转动阻尼系数为L r =42.9ΛH ,R r =164Λ8,J =0.3kgm ^2,K d =0Ζ利用M A TLAB S I M UL I N K 中的S 2functi on 模块构造BD FM 的仿真模块、坐标变换模块Λ系统的仿真框图见图2Λ外施电源(在d q 0坐标系下)的表述式图2 无刷双馈电机的系统仿真框图 图3 主绕组坐标变换 F ig .2 BD FM system si m ulink configurati on F ig .3 Coo rdinate transfo r m ati on of m ain w inding U qsp =3 2U q co s (Ξp t -3Ηr +фp )U qsp =3 2U q co s (Ξp t -3Ηr +фp )U qsc =3 2U c co s (Ξc t +Ηr +фc )U qsc =3 2U c co s (Ξc t +Ηr +фc )(5)37 第6期 黄守道等:基于M A TLAB 的无刷双馈电机建模与仿真 式中фp 为主绕组电源的初始相位角;фc 为控制绕组的初始相位角;Ηr 为转子转过的电气角度,Ηr =∫t0Ξd t Ζ相应的电源系统框架图如图3(主绕组部分)Ζ3 仿真结果及分析3.1 单馈运行主绕组加上380V ,50H z 的电源(U p =380,f p =50),控制绕组短路,在仿真中即U c =0,f c =0;电机转速曲线和转矩曲线如图4和图5Ζ图4 转速曲线 图5 转矩曲线F ig .4 T he curve of speed F ig .5 T he curve of to rqueBD FM 在单馈状态运行,相当于一台极对数为(P p +P c )的同步电机,其同步转速为60f c (P p +P c )即750r m in ,空载时稳定转矩为0Nm Ζ从图可知,单馈运行时的仿真曲线符合上述理论分析的结果(即式(1))Ζ3.2 双馈运行在双馈运行状态下,电机的转速曲线表达式(1)决定Ζ从转速表达式我们可以看出:通过改变变频器的频率(即控制绕组的电源频率),就可以控制电机的转速Ζ在仿真过程中保持U f 为一恒值(此例中U f =10),待电机运行稳定后,慢慢调节控制绕组的电压和频率进行仿真(每3s 上调1H z ,转速约下降30r m in ).在传统恒碰通控制(即恒压频比控制)下,控制绕组上所加电压与频率满足下式的关系 <=U q4.44f q K ΞW (6)图6为电机的转速随控制绕组频率的变化而变化的情况,图7为频率调节时转矩变化的情况Ζ从这两条曲线可以看出1)转速与控制绕组频率保持同步变化的关系(即式(1)的关系)Ζ2)当控制绕组频率变化时,由于产生谐波转矩,而使转速、转矩出现脉动现象Ζ在某些特定频率f c 范围内,可能由于谐波转矩太大,而使BD FM 失去同步Λ47 湖南大学学报(自然科学版) 2002年图6 转速曲线 图7 转矩曲线F ig .6 T he curve of speed F ig .7 T he curve of To rque由图4~7可以得出,两种运行状态下的转速变化过程与原理分析的结果是一致的,只是由于没有对控制绕组电流相位加以控制,电机转速跟随f c 的能力较弱,动态性能不很理想Λ因此合理地调节控制绕组电流,从而控制电机的转矩,是增强该种电机动态响应能力的关键所在Λ4 结 论本文以BD FM 的d q 0的数学模型为基础,利用M A TLAB 的强大矩阵计算功能和S I M UL I N K 的交互式仿真集成环境,建立电机状态方程的S 2Functi on 函数和仿真模型,完成对BD FM 的仿真研究Λ从仿真结果来看,一方面验证本文建立的BD FM 的数学模型;另一方面说明运用M A TLAB S I M UL I N K 作仿真研究的功能强大和方便快捷的特点Λ参考文献:[1] R YQ I L I ,ALAN WALLA CE ,R EN SPEE .D ynam ic si m ulati on of brush less doubly 2fed m a 2ch ines [J ].IEEE T rans on Energy Conversi on ,1991,6(3):445-451.[2] XU F ,L I AN G ,L IPO T A .T ransient model of a doubly excited reluctance mo to r [J ].IEEE T ranson Energy Conversi on ,1991,6(3):1126-1133.[3] M I CHA EL S ,BO GER ,ALAN K ,et al.General po le num ber model of the brush less doubly 2fed m ach ine [J ].IEEE T rans on Industry A pp licati on ,1995,3(5):1022-1027.[4] 黄科元.无刷双馈电机调速系统研究[D ].湖南大学电气与信息工程学院,2001.[5] 贺益康编著.交流电机计算机仿真[M ].北京:科学出版社,1998.57 第6期 黄守道等:基于M A TLAB 的无刷双馈电机建模与仿真 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双馈电机控制模型的建立与仿真
摘要院本文通过对风速的分解,建立了实际风速的综合模型,在风机动态特性分析的基础上,建立了双馈电机及控制系统的仿真模型。
所建立的模型具有通用性,便于Matlab/Simulink 的仿真分析。
Abstract: This paper, which is based on the analysis of wind speed, established a comprehensive model of the actual wind speed. Andaccording to the analysis of dynamic characteristics of wind generators, the simulation model of the double fed motor and control system areset up. The model is so general that it is easy to analysis and simulation data in Matlab/Simulink.
关键词院双馈电机;风速;控制;建模Key words: double fed motor;wind speed;control;modeling中图分类号院TM303 文献标识码院A 文章编号院1006-4311(2014)21-0047-020
引言双馈电机是目前开发的新型交流电机,它兼有异步电机和同步电机的优点。
与其相应的风力发电技术,是一种具有良好应用前景的风力发电技术。
它可以优化风力发电机的运行条件,并使发电机组与电网之间实现良好的柔性连接。
由此,可在提高风能利用率和转换效率的同时使发电机顺利实现并网操作[1]。
1 风速模型风能是一种洁净的可再生能源,然而能量密度较低,因此需较大的风轮获取能量。
此外,风能随海拔、时间、地点的改变而改变。
它的变化性和随机性更使其不易被利用。
因此,为使得风力发电机组有稳定的功率输出,对风速的分析和预测以及建模是不可或缺的。
据风能特性,现将风速模型分解为以下两个部分:平均风速———周期大于10min,脉动风速———周期极短。
最终作用在风力机上的模拟风速为上述两种风速之和。
与两种风速相应的预测称为短时风速预测和中长期风速预测。
对短期风速的准确预测有助于减轻因风速波动产生的对电网不利的影响,还可优化电网调度部门的调度计划;对中长期风速的准确预测则有助于设计规划风电场规模,制订长远发展目标[2]。
对于变动频繁的短期风速,可利用其特性———随机性、时间相关性、空间相关性———拟定符合其波动情况的状态方程,经过一系列的算术变换得出符合实际的短时风速序列。
其具体步骤大致如下:淤测得风电场数据并将其分解。
于对分解得到的不同成分建立不同预测模型。
盂将各个预测模型得到预测值叠加成最终结果。
榆将由盂得到的结果作为样本,与所测得的数据整合,得到新的样本。
虞再将所得样本分解成不同频率分量及其对应项。
重复步骤于~盂。
愚综和步骤榆与虞得到短期风速预测模型。
相较于短时风速,中长期风速的变化缓慢,可将其分解为不同的分量。
对应不同分量建立不同的有关于时间t的方程。
综上所述,得到可用风速的综合模型:
将矩阵中电流关于时间的微分用角速度表示,整理后可得MATLAB/Simulink 中所需各个模块参数,从而整合成双馈电机模型。
3 发电机控制模型双馈发电机的控制系统由两个闭环构成。
其中,外环部分设计成转速控制环。
转速环的给定值为根据风速计算出的与风力发电机最佳叶尖速比对应的转速值。
环节中,限幅输出的PI 控制器的输入为转速环给定值与电机转速反馈值的差值。
对于输出转子的无功电流及有功电流的
设定值,则据电网对风力发电系统的要求计算得到。
内环部分设计成转子电流控
制环。
它由两个均采用限幅输出电流调节器的通道控制。
输出的电压控制量由电
流误差量经过调节后形成。
接着,叠加补偿量即前馈电压,即得到转子电压控制量。
再通过变换坐标,可得控制双馈电机转子电压的指令。
其结果通过SVPWM
模块可调制转子侧的变换器,从而产生满足实际要求的励磁电流及电压。
仿真时
的风速模型采用上述风速模型,最终调整参数值,使双馈风力发电机安全可靠运行,有稳定输出。
4 结论本文在风力发电风速研究基础上,对风速分解,于MATLAB 中建立相
应风速模型,整合可得实际风速模型,并得到动态分析和仿真所需的风速序列。
同时,根据数学公式,在Simulink 中建立风力发电机模型及其相应控制模型。
最终调整参数,可通过控制系统保证风力发电机组安全可靠的运行,并实现对稳
定机组输出功率和优化功率曲线的控制。
参考文献院[1]吉同军,丁晓群,刘皓明.双馈式风力发电系统的运行控制与建
模仿真[J].中国电力,2008(41):81-86.[2]马应魁.短期风速多步预测的研究[J].工矿自
动化,2010(9):54-58.[3]王聪,刘永前.风力发电系统的建模与仿真研究[J].中国电力教育,2006:125-128.[4]张凤阁,王惠军,体宁泽等.新型无刷双馈变速恒频风力发电系统
的建模与数字仿[J].太阳能学报,2005(26):660-664.基金项目院本文得到浙江省大学生创新计划(编号:2013R417038)的资助。
作者简介院金菁(1991-),女,浙江杭州人,嘉兴学院电气专业学生,研究方向为微电网的设计与仿真。