基于FPGA的提高激光测距分辨率的方法
基于FPGA的激光雷达SLAM测绘设计与实现
基于FPGA的激光雷达SLAM测绘设计与实现激光雷达(SLAM)是一种基于激光传感器的实时定位与地图构建技术,它可以通过激光雷达扫描环境,利用激光点云数据实时确定机器人的位置,并构建实时地图。
激光雷达SLAM在无人驾驶车辆、机器人导航、智能家居、工业自动化等领域有着广泛的应用。
而基于FPGA的激光雷达SLAM测绘设计与实现,可以提高系统的实时性和性能,为激光雷达SLAM系统的发展带来新的机遇和挑战。
一、激光雷达SLAM原理激光雷达SLAM系统通常包括三个部分:传感器数据采集、实时定位与建图、环境地图更新与优化。
传感器数据采集是指通过激光雷达获取环境的三维点云数据;实时定位与建图是指通过激光点云数据实时确定机器人的位置,并构建实时地图;环境地图更新与优化是指对已建立的地图进行更新和优化,以适应环境的动态变化。
基于FPGA的激光雷达SLAM系统设计可以充分发挥FPGA在并行计算和实时处理方面的优势,提高系统的实时性和性能。
一般来说,基于FPGA的激光雷达SLAM系统设计包括三个关键步骤:激光雷达数据采集与预处理、实时定位与建图计算、环境地图更新与优化。
在激光雷达数据采集与预处理阶段,需要通过FPGA实时采集激光雷达的点云数据,并进行预处理,包括数据滤波、去噪、坐标变换等。
这些预处理操作需要高速、实时地完成,而FPGA可以提供高度并行的计算能力,能够满足实时性要求。
在实时定位与建图计算阶段,需要对激光雷达的点云数据进行特征提取、匹配和位姿估计,以实现对机器人位置的实时定位和地图的实时构建。
这些计算需要高度的并行性和实时性,而FPGA的并行计算能力和低延迟特性,能够满足这些要求。
在环境地图更新与优化阶段,需要对已建立的地图进行增量式更新和全局优化。
这一过程涉及大量的数据处理和计算,而FPGA提供的高度并行的计算能力和实时处理能力,可以显著提高地图更新和优化的效率和性能。
基于FPGA的激光雷达SLAM系统设计可以有效提高系统的实时性和性能,适应激光雷达SLAM系统在无人驾驶车辆、机器人导航等领域对实时性和性能的要求。
基于FPGA的激光雷达SLAM测绘设计与实现

基于FPGA的激光雷达SLAM测绘设计与实现1. 引言1.1 背景介绍激光雷达(SLAM)技术是一种通过激光雷达传感器获取环境地图并同时定位自身位置的方法。
随着自动驾驶、智能仓储等领域的发展,对SLAM技术的需求逐渐增加。
传统的SLAM系统通常基于计算机和传感器进行实现,但由于处理复杂环境和实时性要求较高,计算机性能的限制成为了制约系统性能的关键因素。
本文将深入探讨基于FPGA的激光雷达SLAM测绘设计与实现,分析FPGA在激光雷达SLAM中的应用,设计并实现系统框架,研究关键技术和算法,最终通过性能评估和实验结果验证系统的有效性和可行性。
希望通过本文的研究成果,为深入理解FPGA在激光雷达SLAM中的应用提供参考和启示,为未来工作的展望和发展提供一定的借鉴和参考价值。
1.2 研究意义本研究旨在探讨基于FPGA的激光雷达SLAM测绘设计与实现,通过将FPGA技术与激光雷达SLAM相结合,实现更高效的环境建模和自主定位。
具体包括FPGA在激光雷达数据处理、地图构建、路径规划等方面的应用,以及针对FPGA平台进行优化的关键技术和算法。
通过本研究的开展,有望为自主导航和定位技术的发展提供新思路和方法,同时对于FPGA在激光雷达SLAM中的应用具有重要的理论和实践意义。
1.3 研究目的研究目的:本文旨在探讨基于FPGA的激光雷达SLAM测绘设计与实现,旨在通过研究激光雷达SLAM技术和FPGA在其中的应用,设计出一种高效、实用的激光雷达SLAM系统。
具体目的包括:提高激光雷达SLAM系统的测绘精度和实时性;优化系统的算法和硬件设计,实现对动态环境的建模和定位;探索FPGA在激光雷达SLAM中的优势和局限性,为未来的研究和发展提供参考。
通过本文的研究,旨在为促进激光雷达SLAM技术的发展,为实际应用提供更好的解决方案,推动激光雷达在自动驾驶、机器人导航等领域的广泛应用。
2. 正文2.1 激光雷达SLAM技术概述SLAM(Simultaneous Localization and Mapping)是指无先验知识的环境下,同时实现定位和建图的技术。
一种提高相位激光测距精确度的方法
一种提高相位激光测距精确度的方法陈 敏1,杜小平2(11装备指挥技术学院士官系 北京 101406;21装备指挥技术学院电子工程系 北京 101406)摘 要:描述了一种采用相位式激光测距提高测距精度的方法,给出了采用相位式进行激光测距的原理,指出了采用单一频率进行测距时存在的矛盾,从而提出了在单一频率的基础上添加多个辅助频率进行测距,分析了采用多个辅助频率进行相位激光测距的原理,并对采用该方法进行了精度分析。
从分析的结论看,采用的辅助频率个数越多,则越能提高测距精度,同时该方法还能提高测量范围,解决了单一频率测量时的矛盾,达到了测距时高精度、大范围的工程应用要求。
关键词:相位激光测距;辅助频率;精度中图分类号:TN 249 文献标识码:B 文章编号:1004373X (2005)1611302A M ethod of I m prov i ng the M ea surem en t Prec ision for Pha sela ser M ea sur i ng D istanceCH EN M in 1,DU X iaop ing2(11D epart m ent of Sergeant ,A cade m y of Equi pm ent Comm and Techno l ogy ,B eijing ,101406,Ch ina ;21D epart m ent of E lectronic Engineering ,A cade m y of Equi pm ent Comm and Techno l ogy ,B eijing ,101406,Ch ina )Abs tra c t :T h is paper p ropo ses a new m ethod to i m p rove m easu rem en t p recisi on ,w h ich is called phase laser m easu ring m ethod 1A fter exp lain ing the w o rk ing theo ry of th is new m ethod ,the paper po in ts ou t the con tradicti on w hen single frequency m easu rem en t m ethod is adop ted ,in troduces a so lu ti on of adding m u lti p le aid frequencies to single frequency w hen conducting laser m easu ring ,and analyzes the w o rk ing theo ry and p recisi on of th is so lu ti on 1F rom the analysis ,the paper concludes that the mo re aid frequency is adop ted ,the mo re p recise the m easu ring resu lt w ill be 1In additi on ,the new m ethod can en large m easu ring scope 1T herefo re ,in app licati on of p ro ject ,the new m ethod better m eets the requ irem en t of h igh p recisi on and large scope 1Ke yw o rds :phaselaser m easu ring distance ;aux iliary frequency ;p recisi on收稿日期:20050512 激光测距仪无论在军事应用,还是在科学技术、生产建设方面都起着重要作用。
同时提高星载激光测距仪分辨率与动态范围的一种方法
为 33 3 s 3 . 。从而得出二进制计数器 的位数为 l 6
进行 试验 。此 款 F G P A能 够运行 的最 高 时钟频 率 为
位。如果动态范围或测距分辨率提高一倍 , 则计数 2 0MH 。分别 构 造 l 5 z 6位 和 3 2位 的计 数 器 , 综 经 器 的位数 必须 增加一 位 。 合、 布局 布线后 的对 比结果 如 表 1 。 然而, 传统 的加法计数器存 在一个 问题 : 计数
来标定激光发出的时间。而射 向 目标的激光脉冲, 由于 目标 的漫 反射作 用 , 部分 光从 原路 反射 回 一 来, 进入接收望远镜 , 它经过窄带滤光片、 电探测 光
21 0 1年 8月 1 6日收到
2 测距分辨率与动态范围的矛盾
由于航天领域 的高可靠性和高稳定性要求 , 星
载 激光 测 距 仪 一 般 采 用 同步 计 数 器 进 行 计 时 ] 。
第1 1卷
第3期 1
2 1 年 1 月 01 1
科
学
技
术
与
工
程
Vo 1 No 3 NO .2 1 L1 .1 V 0 l
17 — 11 (0 1 3 —89 0 6 1 8 5 2 1 ) 17 3 —3
S in e T c n lg n n i e r g ce c e h oo y a d E gn e i n
V 4 .; 47 1
文献标志码
A
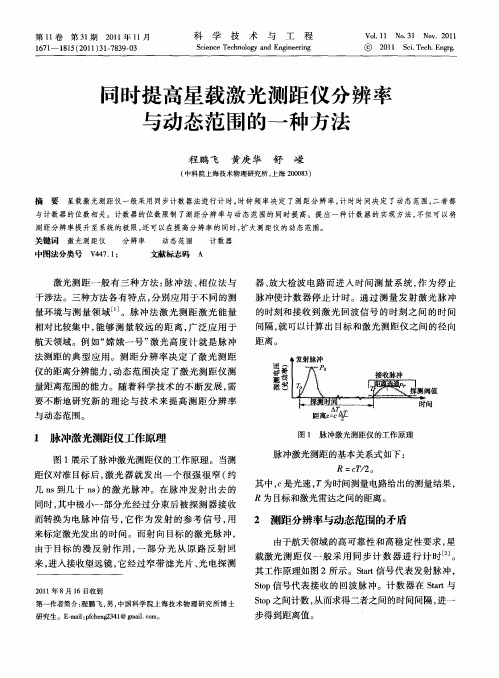
激光测距一般有 三种方法 : 脉冲法、 相位 法与
干 涉法 。三 种方 法各 有 特 点 , 别 应 用 于 不 同 的测 分 量环 境 与 测 量 领 域 J 脉 冲 法 激 光 测 距 激 光 能 量 1 。 相对 比较集 中 , 能够 测 量 较 远 的距 离 , 泛 应 用 于 广
基于FPGA的激光雷达SLAM测绘设计与实现

基于FPGA的激光雷达SLAM测绘设计与实现【摘要】本文旨在基于FPGA技术实现激光雷达SLAM测绘系统,并探讨其在智能车、机器人导航等领域的应用。
在激光雷达原理及应用部分,介绍了激光雷达的工作原理和常见应用场景。
随后,概述了SLAM技术在自主导航中的重要性和发展现状。
接着探讨了FPGA在激光雷达SLAM中的作用,包括加速实时处理和降低功耗等方面。
系统设计与实现部分详细讲解了激光雷达数据的处理流程和FPGA硬件设计。
实验结果与分析展示了系统性能和精度,验证了其可行性和准确性。
总结了研究成果,并展望了未来在多传感器融合、实时定位等方面的研究方向,为激光雷达SLAM技术的进一步发展提供了参考。
【关键词】关键词:激光雷达、SLAM、FPGA、测绘、设计、实现、原理、应用、系统、实验、结果、分析、总结、展望、研究方向。
1. 引言1.1 背景介绍激光雷达技术是一种通过激光束对目标进行测距和成像的技术,具有高精度、高分辨率和远距离探测等优势,被广泛应用于自动驾驶、智能仓储、机器人导航等领域。
同时定位与地图构建(SLAM)技术是指在未知环境中通过传感器数据实时构建地图,并同时实现自身定位的技术,是智能系统中的重要组成部分。
基于FPGA的激光雷达SLAM测绘系统的设计与实现,将有效提高激光雷达SLAM系统的性能和可靠性,为自动驾驶、机器人导航、智能仓储等领域的应用提供更加精准和可靠的环境感知与定位服务。
对基于FPGA的激光雷达SLAM测绘技术进行研究与实现具有重要意义和广阔应用前景。
1.2 研究意义:激光雷达SLAM技术在无人驾驶、机器人导航、智能交通等领域具有广泛的应用前景。
随着人工智能、自动驾驶等技术的快速发展,激光雷达SLAM的研究变得越来越重要。
通过对激光雷达SLAM系统进行研究和设计,可以实现地图的实时构建和自主导航,为实现智能交通系统、智能物流系统、智能家居等提供技术支持。
基于FPGA的激光雷达SLAM系统具有低延迟、高精度、低功耗等优势,可以更好地满足实时性和稳定性的要求。
激光雷达的使用方法及测量精度提高措施
激光雷达的使用方法及测量精度提高措施激光雷达是一种通过激光束进行测距和探测的高精度设备,广泛应用于地理测绘、自动驾驶、机器人导航等领域。
本文将探讨激光雷达的使用方法,并提出一些提高其测量精度的措施。
一、激光雷达的使用方法激光雷达的使用方法可分为扫描式和固态两种。
扫描式激光雷达通过旋转或扫描镜片来实现激光束的扫描,能够获得全方位的点云数据。
固态激光雷达则通过固定的光学元件来实现激光束的发射和接收,其工作原理更加简洁高效。
在实际使用中,激光雷达需要放置在一个相对稳定的位置,并调整其角度以获得所需的扫描范围。
同时,还需根据实际需要设置激光雷达的参数,如扫描角度、扫描速度、功率等。
此外,还需要考虑周围环境的影响,如光照强度、反射表面的材质等因素。
二、提高激光雷达测量精度的措施为了提高激光雷达的测量精度,可以从以下几个方面入手:1. 优化激光雷达的参数设置激光雷达的参数设置对测量精度具有重要影响。
首先,需要选择合适的扫描角度和扫描速度,以平衡数据采集的全面性和时间效率。
此外,功率的设定也需要根据实际场景进行调整,避免过强或过弱的激光束对数据质量的影响。
2. 考虑多传感器融合技术激光雷达可以与其他传感器,如相机、惯性测量单元等进行融合,以获取更为细致和准确的数据。
多传感器融合技术能够弥补激光雷达在遮挡物识别和远距离探测方面的不足,提高数据的完整性和准确性。
3. 加强数据处理与滤波算法激光雷达采集到的原始点云数据常常包含噪声和无效点,需要进行数据处理和滤波。
常用的滤波算法包括高斯滤波、采样一致滤波(SOR)、法向量滤波等。
通过合适的滤波算法对数据进行处理,可以减少噪声干扰,提高测量精度。
4. 定期进行校准与维护激光雷达的测量精度也与其自身的校准状况密切相关。
因此,定期进行校准与维护是提高激光雷达测量精度的重要手段。
校准的内容包括内参校准、外参校准等,以保证激光雷达的工作状态稳定和准确。
综上所述,激光雷达具有广泛的应用前景,但在使用过程中需要注意参数设置和环境因素的影响。
基于FPGA超声测距系统的改进
4 实 验 结果
图 4 55 是 5 发射部分的输出信号,左图表达的 是8 个波,这 8 个波的频率是 4 H ,右图说明 8 0 z k 个波是每隔—定时间发送。间隔时间是 10 s 0 。 m
几几几 …
・-— --- ---- —- --- ・-- ---- -一 — - -
2 2年 8A 01 第 8期
电 子
测
试
Aug. 201 2 No8 .
EL EcT RO NI C T ESr
基于F GA超 声测距 系统 的改进 P
杨 兆飞 ,司 洋
( 中北大学 信息探测与处理技术研究所 ,山西太原 0 05 ) 30 1
摘要 :本文介绍了一种基于F G 超 声波测距系统的改进 方法。 PA 文中的控制模块为黑金开发板 , 并且对
器构成的反向放大器,运 用两级放大达 到对小信 号的放大,最终把接收信号放大 10 倍。 00
整流 电路 部分 实 现 了一个 开 关 作用 ,当接 收 到 了 回波信 号,开 关 就 打 开 接 地 ,给 F G P A发 送
一
个低 电平,让控制部分停止计数 ; 在其余时刻
开关就断开发送高电平。
s se .Th o to o u e ma e o a k g l e eo m e tb a d n e p e t r a a d r ic t n ytm e c n r lm d l d fBlc o d d v l p n o r ,a d s tu x e n lh r wa e cr ui .I
的距离 ; 其二 ,单片机的程序读取是 串行执行 的,
本 文 所使 用 的控 制 模 块 是 黑 金 开发 板 的
FPGA在远程激光测距中的应用
・
光 电技 术 与系统 ・
FG P A在 远 程 激光 测 距 中 的应 用
张丽 丽 , 江 涛 , 傅 张志 勇 , 丹梅 牛
( 河南科技 大学 电子信息工程学院 , 河南 洛 阳 4 10 ) 7 0 3
ห้องสมุดไป่ตู้
摘 要 : 介绍 了利用 A T R L E A公司的 F G P A芯片( P C T4 1) E 1 3 147 及其配置芯片( P S S ) E C 1I 进 8 行激光测距机设计的一种实现方法。对于系统硬件 的工作流程和软件 的设计给予 了描述 , 最
Ap lc to fFPGA n l n it n e ls r r n i g p ia i n o i o g d sa c a e a gn
ZHA NG il, U Ja g to, HANG Z i o g NI a — i L — F in -a Z i h— n , U D n me y
G hp E 1 3 147 n scn gr i hp E C 1I) N t nyte a w r ss m i iut tdb t l A ci( P C T 4 1)adi of uao c i( P S S8 . o ol h r ae yt ls a ,u a o t i tn h d e sl r e s
( l t ncIf mao nier gC lg f A S ,u yn 7 03 C ia Ee r i no t nE g ei o eeo U T L oa g 10 , hn ) co r i n n l H 4
Ab ta t T i a t l n rd c s te r aiain meh d t a h a e n e n e e in d u ig o T RA P s r c : h s ri e i t u e h e l t t o h tte ls r a g f d ri d s e sn f c o z o r i s g AL E SF —
DSP激光测距系统的研究的开题报告
基于FPGA/DSP激光测距系统的研究的开题报告一、选题背景和意义随着工业技术的不断进步和发展,激光测距技术已经逐渐成为现代工业测量中重要的一种技术手段。
然而,传统的激光测距方法存在着许多弊端,如容易受到环境干扰、对信号处理器的要求较高等问题。
因此,基于FPGA/DSP的激光测距系统研究成为解决以上问题的有效途径。
本项目旨在研究基于FPGA/DSP的激光测距系统,采用硬件实现的方式来完成测距过程,从而避免传统的测距方法存在的弊端,提高测距精度和可靠性。
本系统的研究和开发不仅可以应用于工业和航天领域,也可以用于军事领域的测距任务。
二、研究内容和方案(1)系统设计本系统主要由FPGA、DSP、激光器、接收器、滤波器、放大器等组成。
其中,FPGA与DSP分别负责系统的控制和信号处理。
(2)信号处理本项目所采用的信号处理算法主要是基于FFT变换来实现。
首先,通过激光器发射激光信号,经过接收器接收后通过滤波器、放大器等前置电路处理,然后将信号送入FPGA进行采样、以及进行相位解调等操作,通过FFT将信号从时域变换到频域,得到信号的频谱,通过测量信号的频率和相位差,最终得到被测物体与激光源之间的距离。
(3)系统测试通过使用该系统对不同物体进行测距,从而验证该系统的可靠性和测距精度,同时对比传统的激光测距方法进行对比分析。
三、预期目标和拟定计划本项目预期能够研制出基于FPGA/DSP的激光测距系统,可以实现高精度的测距任务。
具体计划如下:月份完成内容第1-2个月系统设计和信号处理算法研究第3-4个月硬件模块制作和系统集成第5-6个月系统测试和参数调试第7个月撰写论文,准备答辩四、研究工作所需条件和费用本项目所需条件和费用如下:(1)计算机和相关软件:10万元;(2)实验场地:5万元;(3)设备和器材:20万元;(4)人员工资:20万元。
总计:55万元。
五、预期成果(1)基于FPGA/DSP的激光测距系统;(2)相关论文发表2篇;(3)实现纳米级的测距精度;(4)整体系统的各项性能指标达到预期要求。
基于fpga的单线激光雷达数据处理
基于fpga的单线激光雷达数据处理激光雷达:⾸先来给⼤家稍微介绍以下激光雷达,激光雷达,即Light Detation and ranging,它相⽐于其他雷达,优点⾮常明确,包括 1)、具有极⾼的分辨率;2)、抗⼲扰能⼒强;3)、获取的信息量丰富;4)、全天时⼯作;最近⼀段时间有幸接触到镭神LS01C型单线激光雷达,LS01C型激光雷达是深圳市镭神智能系统公司研发的⼀款低成本⼆维扫描测距产品。
该激光雷达可实现6⽶范围内的360°⼆维平⾯扫描,产⽣空间的平⾯点云地图⽤于地图绘制、机器⼈⾃主定位导航、智能设备壁障等应⽤。
激光测距采⽤激光三⾓测距系统,三⾓测距原理可参考/xiangz_csdn/article/details/53814290LSLIDAR通讯参数:波特率:230400bps;校验位:NONE;数据位:8bits;停⽌位:1bits;数据格式:⼗六进制。
⾸先接触雷达,我从数据通信⼊⼿,通过uart串⼝发送启动指令(0xA5 0x2C 0xE1 0xAA 0xBB 0xCC 0xDD)和停⽌指令(0xA5 0x25 0xE1 0xAA 0xBB 0xCC 0xDD)来控制雷达运⾏和停⽌。
采⽤两种⽅法来控制雷达运⾏状态:(1)、将启动和停⽌指令预存在程序中,然后和FPGA板⼦的开关相结合,通过开关来控制雷达;(2)、采⽤串⼝助⼿来发送指令控制雷达运⾏和停⽌。
接下来贡上两种程序代码:⼀、预存指令:分为四个模块:分频模块clkdiv.v、发送模块uarttx.v、测试模块(存指令模块)test_tx_r.v、顶层模块top_tx_r.vmodule clkdiv(clk, clkout); //分频模块input clk;output clkout;reg clkout;reg [15:0] cnt;always @(posedge clk)begin//板⼦时钟为100MHZ,采⽤16倍波特率进⾏采样,计算得分频系数为27if(cnt == 16'd13)beginclkout <= 1'b1;cnt <= cnt + 16'd1;endelse if(cnt == 16'd27)beginclkout <= 1'b0;cnt <= 16'd0;endelsebegincnt <= cnt + 16'd1;endendendmodulemodule uarttx(clk, datain, wrsig, idle, tx);//发送模块input clk;input [7:0] datain; //并⾏输⼊8位数据input wrsig; //输⼊控制位,上升沿有效output idle;//输出标志位output tx; //串⾏输出数据reg idle, tx;reg send;reg wrsigbuf, wrsigrise;reg presult; //发送校验reg[7:0] cnt;parameter paritymode = 1'b0;always @(posedge clk) //判断wrsig的上升沿beginwrsigbuf <= wrsig;wrsigrise <= (~wrsigbuf) & wrsig;endalways @(posedge clk)beginif (wrsigrise && (~idle)) //wrsig为上升沿且处于空闲状态发送数据beginsend <= 1'b1; //进⾏发送endelse if(cnt == 8'd152) //8位数据发送完毕beginsend <= 1'b0;endendalways @(posedge clk)beginif(send == 1'b1)begincase(cnt)8'd0: //发送起始位begintx <= 1'b0;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd16: //发送第⼀位begintx <= datain[0];presult <= datain[0]^paritymode;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd32: //发送第⼆位begintx <= datain[1];presult <= datain[1]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd48: //发送第三位begintx <= datain[2];presult <= datain[2]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd64: //发送第四位begintx <= datain[3];presult <= datain[3]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd80: //发送第五位begintx <= datain[4];presult <= datain[4]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd96: //发送第六位begintx <= datain[5];presult <= datain[5]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd112: //发送第七位begintx <= datain[6];presult <= datain[6]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd128: //发送第⼋位begintx <= datain[7];presult <= datain[7]^presult;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd144: //发送停⽌位begintx <= 1'b1;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd152:begintx <= 1'b1;idle <= 1'b0;// 处于空闲状态,可以发数据cnt <= cnt + 8'd1;enddefault:begincnt <= cnt + 8'd1;endendcaseendelsebegintx <= 1'b1;cnt <= 8'd0;idle <= 1'b0;endendendmodulemodule testuart(clk, dataout,wrsig,rst,key_mov,key_stop);input clk,rst;input key_mov;//开始开关input key_stop;//停⽌开关output[7:0] dataout;output wrsig; //发送指令标志位reg [7:0] dataout;reg wrsig;reg [16:0] cnt;always @(posedge clk or negedge rst )beginif(!rst)begindataout<= 0;cnt <=0;endelsebeginif(key_mov==1'b1)//运⾏开关闭合有效beginif(cnt <= 1779) //⼀组指令周期数begin//发送开始指令case(cnt)16'd254: begindataout <= 8'hA5;wrsig <= 1'b1; cnt <= cnt + 16'd1;end 16'd508: begindataout <= 8'h2C;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd762: begindataout <= 8'hE1;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1016: begindataout <= 8'hAA;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1270: begindataout <= 8'hBB;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1524: begindataout <= 8'hCC;wrsig <= 1'b1; cnt <= cnt + 16'd1; enddataout <= 8'hDD;wrsig <= 1'b1; cnt <= cnt + 16'd1;end default:beginwrsig <= 1'b0;cnt <= cnt + 16'd1;endendcaseendelsebeginwrsig <= 1'b0;cnt <= 16'd0;endendelse if(key_stop==1'b1)//停⽌开关闭合beginif(cnt <= 1779)begin//发送停⽌指令case(cnt)16'd254: begindataout <= 8'hA5;wrsig <= 1'b1; cnt <= cnt + 16'd1;end 16'd508: begindataout <= 8'h25;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd762: begindataout <= 8'hE1;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1016: begindataout <= 8'hAA;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1270: begindataout <= 8'hBB;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1524: begindataout <= 8'hCC;wrsig <= 1'b1; cnt <= cnt + 16'd1; end 16'd1778: begindataout <= 8'hDD;wrsig <= 1'b1; cnt <= cnt + 16'd1;end default:beginwrsig <= 1'b0;cnt <= cnt + 16'd1;endendcaseendelsebeginwrsig <= 1'b0;cnt <= 16'd0;endendelsebeginwrsig <= 1'b0;cnt <= 16'd0;endendendendmodulemodule uarttx(clk, datain, wrsig, idle, tx);//发送模块input clk;input [7:0] datain; //并⾏输⼊8位数据input wrsig; //输⼊控制位,上升沿有效output idle;//输出标志位output tx; //串⾏输出数据reg idle, tx;reg send;reg wrsigbuf, wrsigrise;reg presult; //发送校验reg[7:0] cnt;parameter paritymode = 1'b0;always @(posedge clk) //判断wrsig的上升沿beginwrsigbuf <= wrsig;wrsigrise <= (~wrsigbuf) & wrsig;endalways @(posedge clk)beginif (wrsigrise && (~idle)) //wrsig为上升沿且处于空闲状态发送数据beginsend <= 1'b1; //进⾏发送endelse if(cnt == 8'd152) //8位数据发送完毕endendalways @(posedge clk)beginif(send == 1'b1)begincase(cnt)8'd0: //发送起始位begintx <= 1'b0;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd16: //发送第⼀位begintx <= datain[0];presult <= datain[0]^paritymode; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd32: //发送第⼆位begintx <= datain[1];presult <= datain[1]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd48: //发送第三位begintx <= datain[2];presult <= datain[2]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd64: //发送第四位begintx <= datain[3];presult <= datain[3]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd80: //发送第五位begintx <= datain[4];presult <= datain[4]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd96: //发送第六位begintx <= datain[5];presult <= datain[5]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd112: //发送第七位begintx <= datain[6];presult <= datain[6]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd128: //发送第⼋位begintx <= datain[7];presult <= datain[7]^presult; idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;end8'd144: //发送停⽌位begintx <= 1'b1;idle <= 1'b1; //处于忙状态cnt <= cnt + 8'd1;endidle <= 1'b0;// 处于空闲状态,可以发数据cnt <= cnt + 8'd1;enddefault:begincnt <= cnt + 8'd1;endendcaseendelsebegintx <= 1'b1;cnt <= 8'd0;idle <= 1'b0;endendendmodule⼆、通过串⼝助⼿来发送:分频模块和上⾯的⼀样,此处不再呈上;module top(clk,rx,tx,idle);input clk,rx;output tx,idle;wire tx,idle;wire clkout,rdsig;wire [7:0] dataout;clkdiv clkdiv_inst(.clk(clk),.clkout(clkout));uarttx uarttx_inst(.clk(clkout),.datain(dataout),.wrsig(rdsig),.idle(idle),.tx(tx));uartrx uartrx_inst(.clk(clkout),.rx(rx),.dataout(dataout),.rdsig(rdsig));endmodulemodule uartrx(clk, rx, dataout, rdsig);input clk; //采样时钟input rx; //UART 数据输⼊output dataout; //接收数据输出output rdsig;reg[7:0] dataout;reg rdsig;reg [7:0] cnt;reg rxbuf, rxfall, receive;parameter paritymode = 1'b0;reg presult, idle;always @(posedge clk) //检测线路的下降沿beginrxbuf <= rx;rxfall <= rxbuf & (~rx);endalways @(posedge clk)beginif (rxfall && (~idle)) //检测到线路的下降沿并且原先线路为空闲,启动接收数据进程beginreceive <= 1'b1;endelse if(cnt == 8'd152) //接收数据完成beginreceive <= 1'b0;endendalways @(posedge clk)beginif(receive == 1'b1)8'd0:beginidle <= 1'b1;cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd24: //接收第 0 位数据beginidle <= 1'b1;dataout[0] <= rx; presult <= paritymode^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd40: //接收第 1 位数据beginidle <= 1'b1;dataout[1] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd56: //接收第 2 位数据beginidle <= 1'b1;dataout[2] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd72: //接收第 3 位数据beginidle <= 1'b1;dataout[3] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd88: //接收第 4 位数据beginidle <= 1'b1;dataout[4] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd104: //接收第 5 位数据beginidle <= 1'b1;dataout[5] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd120: //接收第 6 位数据beginidle <= 1'b1;dataout[6] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd136: //接收第 7 位数据beginidle <= 1'b1;dataout[7] <= rx; presult <= presult^rx; cnt <= cnt + 8'd1;rdsig <= 1'b0;end8'd144:beginidle <= 1'b1;cnt <= cnt + 1'b1;rdsig <= 1'b1;enddefault:begincnt <= cnt + 8'd1;endendcaseendcnt <= 8'd0;idle <= 1'b0;rdsig <= 1'b0;endendendmodulemodule uarttx(clk, datain, wrsig, idle, tx);input clk; //UART 时钟input [7:0] datain; //需要发送的数据input wrsig; //发送命令,上升沿有效output idle; //线路状态指⽰,⾼为线路忙,低为线路空闲output tx; //发送数据信号reg idle, tx;reg send;reg wrsigbuf, wrsigrise;reg presult;reg[7:0] cnt; //计数器parameter paritymode = 1'b0;//检测发送命令是否有效always @(posedge clk)beginwrsigbuf <= wrsig;wrsigrise <= (~wrsigbuf) & wrsig;endalways @(posedge clk)beginif (wrsigrise && (~idle)) //当发送命令有效且线路为空闲时,启动新的数据发送进程beginsend <= 1'b1;endelse if(cnt == 8'd152) //⼀帧资料发送结束beginsend <= 1'b0;endendalways @(posedge clk)beginif(send == 1'b1)begincase(cnt) //产⽣起始位8'd0:begintx <= 1'b0;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd16:begintx <= datain[0]; //发送数据 0 位presult <= datain[0]^paritymode;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd32:begintx <= datain[1]; //发送数据 1 位presult <= datain[1]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd48:begintx <= datain[2]; //发送数据 2 位presult <= datain[2]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd64:begintx <= datain[3]; //发送数据 3 位presult <= datain[3]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd80:begintx <= datain[4]; //发送数据 4 位presult <= datain[4]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;endtx <= datain[5]; //发送数据 5 位presult <= datain[5]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd112:begintx <= datain[6]; //发送数据 6 位presult <= datain[6]^presult;idle <= 1'b1;cnt <= cnt + 8'd1;end8'd128:begintx <= datain[7]; //发送数据 7 位presult <= datain[7]^presult;idle <= 1'b1;cnt <= cnt + 10'd1;end8'd144:begintx <= 1'b1; //发送停⽌位idle <= 1'b1;cnt <= cnt + 8'd1;end8'd152:begintx <= 1'b1;idle <= 1'b0; //⼀帧资料发送结束cnt <= cnt + 8'd1;enddefault:begincnt <= cnt + 8'd1;endendcaseendelsebegintx <= 1'b1;cnt <= 8'd0;idle <= 1'b0;endendendmodule串⼝通信是熟悉板⼦的⼊门练习,可以深刻理解发送数据的⽅式,以及波特率的含义和计算。