匹配算法一
模糊匹配算法实现

模糊匹配算法实现模糊匹配算法是一种在信息处理和数据检索中常用的技术。
它通过比较和计算相似度,找到与给定输入最相似的文本或数据。
这种算法在各种领域都有广泛的应用,比如搜索引擎、自然语言处理和语音识别等。
本文将介绍模糊匹配算法的原理、应用和发展趋势,以及如何使用这种算法来提高信息处理的效率和准确性。
模糊匹配算法的原理是基于文本或数据之间的相似度比较。
它通过计算两个文本之间的相似度,来确定它们之间的关联程度。
常用的相似度计算方法包括余弦相似度、编辑距离和Jaccard相似度等。
这些计算方法可以衡量文本之间的共现度、语义相似度和结构相似度。
通过比较相似度,模糊匹配算法可以找到与给定输入最相似的文本,从而实现信息的匹配和检索。
模糊匹配算法在各种领域都有广泛的应用。
在搜索引擎中,它可以用于理解用户的搜索意图,优化搜索结果的排序和推荐相关内容。
在自然语言处理中,它可以用于句子相似度计算、情感分析和机器翻译等任务。
在语音识别中,它可以用于声纹识别和语音指令理解等应用。
模糊匹配算法还可以应用于数据质量控制、信息抽取和知识图谱构建等领域。
随着人工智能和大数据技术的快速发展,模糊匹配算法也在不断演进和创新。
近年来,深度学习和神经网络等技术的引入,为模糊匹配算法的提升带来了新的突破。
这些技术可以通过训练大规模的数据集,提取更高层次的特征表示,从而提高模糊匹配算法的准确性和效率。
在实际应用中,使用模糊匹配算法需要考虑一些关键问题。
首先是算法的选择和参数的设置。
不同的算法和参数设置会对匹配结果产生不同的影响。
因此,在应用过程中需要根据具体任务的需求和数据特点进行选择和调优。
其次是数据的预处理和清洗。
由于模糊匹配算法对输入文本的要求较高,需要对原始数据进行标准化、去噪和归一化等处理,以提高匹配的准确性和稳定性。
此外,还需要考虑算法的性能和效率,尽量减少计算和存储资源的消耗。
总之,模糊匹配算法是一种重要的信息处理技术,它在搜索引擎、自然语言处理和语音识别等领域有着广泛的应用。
数字货运中车货匹配的算法
数字货运中的车货匹配算法是指在智能化的货运平台上,根据货源信息和运力信息,通过一定的算法进行匹配,以达到最优的车货匹配效果,提高货运效率。
下面是一个简单的数字货运中车货匹配的算法介绍:1. 货源和运力信息的收集与处理首先,平台需要收集货源信息和运力信息,包括货物的种类、位置、时间、数量等,以及车辆的车型、车况、路线、价格等。
这些信息需要经过一定的清洗和整理,以便进行后续的算法处理。
2. 算法模型的设计根据货源信息和运力信息的特征,设计相应的算法模型。
常见的算法模型包括基于规则的匹配算法、基于概率的匹配算法、基于机器学习的匹配算法等。
其中,基于机器学习的匹配算法应用最为广泛,因为它可以根据历史数据和实时数据进行自适应调整,达到更好的匹配效果。
3. 算法的实现与应用利用设计的算法模型,对货源信息和运力信息进行匹配处理。
具体的实现方式包括:a. 相似度计算:根据货源信息和运力信息的特征,计算它们的相似度,从而判断它们是否适合匹配。
常用的相似度计算方法包括欧几里得距离、余弦相似度等。
b. 规则匹配:根据事先制定的规则,对货源信息和运力信息进行匹配。
这种方法适用于简单的场景,但无法应对复杂的匹配需求。
c. 机器学习模型匹配:利用机器学习模型,对货源信息和运力信息进行训练和预测,从而找到最优的匹配结果。
这种方法适用于复杂的场景,但需要大量的数据和计算资源。
在数字货运平台上,车货匹配算法的应用可以提高货运效率,降低运输成本,同时也能够提高货主和司机之间的信任度,促进整个行业的健康发展。
具体来说,车货匹配算法的优势包括:1. 提高运输效率:通过智能化的匹配算法,可以快速找到合适的运力,缩短运输时间,提高运输效率。
2. 降低运输成本:通过合理的匹配,可以降低货主和司机之间的运输成本,提高整个行业的竞争力。
3. 提高信任度:通过智能化的平台和算法,可以减少货主和司机之间的信息不对称,提高双方的信任度,促进整个行业的健康发展。
串的两种模式匹配算法
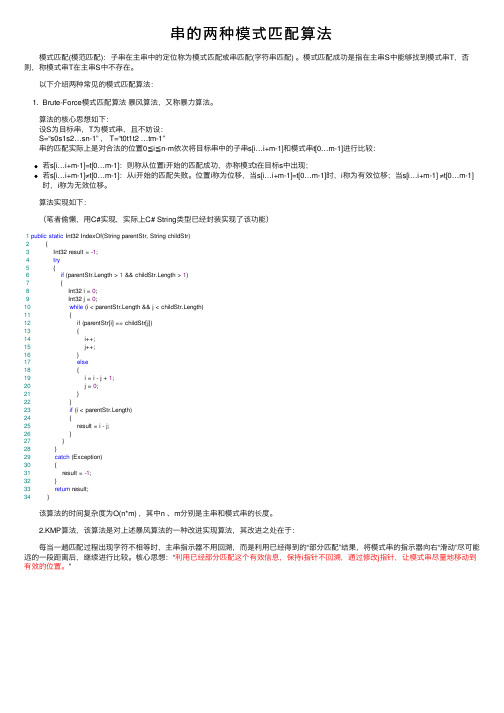
串的两种模式匹配算法 模式匹配(模范匹配):⼦串在主串中的定位称为模式匹配或串匹配(字符串匹配) 。
模式匹配成功是指在主串S中能够找到模式串T,否则,称模式串T在主串S中不存在。
以下介绍两种常见的模式匹配算法:1. Brute-Force模式匹配算法暴风算法,⼜称暴⼒算法。
算法的核⼼思想如下: 设S为⽬标串,T为模式串,且不妨设: S=“s0s1s2…sn-1” , T=“t0t1t2 …tm-1” 串的匹配实际上是对合法的位置0≦i≦n-m依次将⽬标串中的⼦串s[i…i+m-1]和模式串t[0…m-1]进⾏⽐较:若s[i…i+m-1]=t[0…m-1]:则称从位置i开始的匹配成功,亦称模式t在⽬标s中出现;若s[i…i+m-1]≠t[0…m-1]:从i开始的匹配失败。
位置i称为位移,当s[i…i+m-1]=t[0…m-1]时,i称为有效位移;当s[i…i+m-1] ≠t[0…m-1]时,i称为⽆效位移。
算法实现如下: (笔者偷懒,⽤C#实现,实际上C# String类型已经封装实现了该功能)1public static Int32 IndexOf(String parentStr, String childStr)2 {3 Int32 result = -1;4try5 {6if (parentStr.Length > 1 && childStr.Length > 1)7 {8 Int32 i = 0;9 Int32 j = 0;10while (i < parentStr.Length && j < childStr.Length)11 {12if (parentStr[i] == childStr[j])13 {14 i++;15 j++;16 }17else18 {19 i = i - j + 1;20 j = 0;21 }22 }23if (i < parentStr.Length)24 {25 result = i - j;26 }27 }28 }29catch (Exception)30 {31 result = -1;32 }33return result;34 } 该算法的时间复杂度为O(n*m) ,其中n 、m分别是主串和模式串的长度。
图像处理中的特征提取和匹配算法
图像处理中的特征提取和匹配算法图像处理在日益热门的人工智能技术中扮演着一种重要的角色。
在图像处理中,特征提取和匹配算法是两个至关重要的步骤。
特征提取是通过分析图像的局部特点来创建描述图像内容的向量,而匹配是将不同图像的特征或特征向量进行比较,以确定它们是否相似。
本文将介绍几种常用的特征提取和匹配算法。
一、特征提取算法1.尺度不变特征变换(SIFT)SIFT是一种特征提取算法,它能够从不同的尺度和方向上提取图像的局部特征。
这种算法在检索和匹配图像中特别有用。
SIFT算法的基本思想是通过高斯差分算子得到一组尺度空间图像,通过高斯图像之间的差异来确定关键点,然后计算每个关键点的局部梯度的幅值和方向,最后形成一个基于梯度方向的特征描述符。
2.速度增强型稀疏编码(SLEEC)SLEEC是一种新型的高效特征提取算法。
与其他算法不同的是,SLEEC只需扫描一次训练数据即可获得最具代表性的特征。
该算法通过运用具有多个分辨率的降采样、随机稀疏和加速度分析三种技术提取特征,从而实现了比其他算法更高的准确性和速度。
二、特征匹配算法1.暴力匹配算法暴力匹配算法是一种基本的匹配算法,它实现了图像特征之间的精确匹配。
该算法通过比较两个图像之间的每个可能的匹配,来确定匹配的好坏。
虽然该算法的准确性很高,但是它非常耗时,因此只适用于小图像匹配。
2.基于Flann树的匹配算法基于Flann树的匹配算法通过对特征向量进行一系列分割和聚类,以快速找到大量数据中的相似匹配。
该算法不仅适用于大规模数据集,而且具有高效和稳定性。
3.随机抽样一致性算法(RANSAC)随机抽样一致性算法是一种常见的特征匹配算法。
该算法通过随机采样一对点来确定匹配,在这个过程中,通过迭代重复采样和检测结果,不断提高匹配模型的准确度。
结论:在图像处理和计算机视觉中,特征提取和匹配是核心算法。
不同的特征提取和匹配算法适用于不同的应用场合。
在实际应用中,为了达到对图像的快速识别和匹配,我们需要根据具体的需求,选择合适的特征提取和匹配算法。
一种自适应地图匹配算法
l r ae nsla at u g n n lzst f m n eo s l rh a o tm b sdo e -dpigjdme t daaye ep r r a c f i a o tm.Fn l t rsnstes lt nrsl pcue gi h f n n a h e o h t gi ia yipeet h i ai eut itr . l mu o
但 误 匹 配 率 较 高 的位 置 点 投 影 法 和低 速 但 误 匹 配 率 较 低 的 曲线 拟合 法相 结 合 , 过 一 个 自适 应 判 断 步 骤 , 不 同路 段 采 用 与 通 对 之相 对 应 的 匹配 算 法 , 而 达 到 具 有较 高 的 匹配 速 度 和 较 低 的误 匹 配 率 的 目的 。介 绍 了垂 直投 影 匹 配 法 和 曲 线 拟 合 法 的 原 从 理, 并详 尽 论 述 了基 于 自适 应 判 断 的地 图 匹 配算 法 , 论 了 该算 法 的 匹配 率 等 性 能 , 后 给 出 了仿 真 实 验 结 果 图。 讨 最 关键词 G S 地 图 匹 配 ; 辆导 航 ; P; 车 自适 应 匹配 T31 P9 文 献标 识码 A 文 章 编 号 10 —30 (0 70 —03 0 03 16 20 ) 1 00— 2 中图 分 类 号
a p a h we d p dfee t p r c , a o t i rn ma — thig lg rtm o i ee tr a s n r e t raie g e thig p e a d o e n or c o p mac n a o h fr d r n d i od r o e z a hih r mac n s d n lw r ic re t i f o l e mac i ae.Atfrtte p p rit u e e te r fv ria rjcin a d c l — t n d l h e x an n d ti e ma - thn thn rt g s a nr c st o y o et l p o t u ̄e ft g mo e ,t n e plis i ealt p mac i i h e od h h c e o n ii h g
BF算法KMP算法BM算法
BF算法KMP算法BM算法BF算法(Brute-Force Algorithm)是一种简单直接的字符串匹配算法,也称为朴素算法。
BF算法的基本思想是从主串的第一个字符开始,每次移动一个字符,然后和模式串进行逐个字符比较,如果不匹配,则继续下一个位置的比较。
如果字符匹配,则比较下一个字符,直到找到完全匹配的子串或者主串遍历结束。
BF算法的时间复杂度为O(m*n),其中m和n分别为主串和模式串的长度。
当主串和模式串的长度较小时,BF算法是一个简单高效的字符串匹配算法。
然而,当主串和模式串的长度非常大时,BF算法的效率会非常低下。
KMP算法(Knuth-Morris-Pratt Algorithm)是一种改进的字符串匹配算法。
KMP算法的核心思想是利用已经匹配过的部分信息来避免不必要的字符比较。
KMP算法通过构建一个跳转表(也称为失配函数),记录当前位置之前的字符中可能出现的最大公共前后缀长度。
根据跳转表的信息,在模式串和主串不匹配时,可以直接跳过一些字符,继续比较下一个字符。
KMP算法的时间复杂度为O(m+n),其中m和n分别为主串和模式串的长度。
KMP算法在主串长度较大时,相对于BF算法有较高的效率。
它的空间复杂度为O(k),其中k为模式串的长度,用于存储跳转表。
BM算法(Boyer-Moore Algorithm)是一种更为高效的字符串匹配算法。
BM算法的核心思想是尽可能地跳过更多的字符,而不是每次只移动一个字符。
BM算法借助两个启发式规则(坏字符规则和好后缀规则)来确定移动的步长。
坏字符规则根据字符在模式串中的位置,找到离坏字符最近的下标位置,从而确定移动的步长;好后缀规则根据已经匹配的后缀子串,找到离该子串最近的下标位置,从而确定移动的步长。
BM算法的时间复杂度为O(m+n),其中m和n分别为主串和模式串的长度。
BM算法在处理文本串相对固定的情况下有较高的效率,但是在模式串较短,主串较长的情况下,BM算法并不一定比KMP算法更高效。
基于特征的匹配方法
基于特征的匹配方法特征点提取是基于特征的匹配方法的第一步。
特征点通常是图像中具有显著性的点,如角点、斑点等。
一般来说,特征点应该在图像变形、缩放、旋转等情况下有较好的稳定性。
常用的特征点提取算法包括Harris角点检测、SIFT(尺度不变特征变换)、SURF(加速稳健特征)等。
特征点描述是基于特征的匹配方法的第二步。
特征点描述是指将特征点的周围区域转化为一个向量或描述子,以便进行后续的分类和匹配。
特征点描述算法通常使用邻域像素的亮度、梯度、颜色等信息来表示特征点,以保证其唯一性和可区分性。
例如,SIFT算法通过将特征点周围区域分解为不同方向和尺度的梯度直方图来进行描述。
特征点匹配是基于特征的匹配方法的最后一步。
特征点匹配的目标是在不同图像中寻找相似的特征点。
经典的特征点匹配算法包括基于欧氏距离的最近邻匹配、基于鲁棒估计的RANSAC(随机一致性算法)等。
最近邻匹配算法通过计算描述子之间的距离,并选择最近邻特征点作为匹配点。
RANSAC算法则通过随机采样和模型评估的迭代过程来找到最佳的匹配。
基于特征的匹配方法的优点是可以在不同图像之间进行局部匹配,而不需要对整个图像进行处理。
这使得特征点匹配算法具有较强的鲁棒性和计算效率。
此外,基于特征的匹配方法还可以处理图像的平移、旋转、缩放等变换,对于遮挡、光照变化等情况也具有一定的鲁棒性。
然而,基于特征的匹配方法也存在一些挑战。
首先,特征点的选择和描述是一个复杂的任务,需要设计合适的算法来提取和描述特征。
其次,特征点匹配算法容易受到噪声、遮挡、光照变化等因素的影响,从而导致误匹配。
此外,在处理大规模图像数据时,特征点匹配算法的计算效率也面临一定的挑战。
总体来说,基于特征的匹配方法是一种成熟且有效的计算机视觉技术。
通过合理的特征点提取、描述和匹配算法,可以实现不同图像之间的匹配和识别,为图像处理和计算机视觉应用提供了重要的工具。
模板匹配法原理

模板匹配法原理
模板匹配法,又称模板匹配算法,是一种图像处理算法,它可以
在目标图像中寻找与给定模板图像相类似的图像部分。
该算法非常常见,尤其在工业视觉和计算机视觉领域得到广泛应用。
模板匹配法的原理是:将模板图像与目标图像比较,找出它们之
间的相似度,即找到一个在目标图像中的区域,该区域与给定的模板
图像最为相似。
在实际应用中,可以采用不同的相似性度量方法来计
算相似度,例如均方差、归一化互相关等方法。
具体实现时,需要将模板图像在目标图像上平移,每平移一次就
进行一次相似度计算,从而找到最为相似的图像区域。
在计算时,由
于算法的复杂度较高,需要采用一些优化算法,例如快速傅里叶变换
等方法。
模板匹配法的优点在于其简单易懂、易于实现和计算效率较高。
在工业自动化中,它可以用来检测裂纹、缺陷和偏差等问题。
例如,
可以通过与标准图像进行比较,检测生产线上的产品是否合格。
此外,在医学图像处理、安防监控等领域也有广泛应用。
总之,模板匹配法是一种在图像处理领域中常用的算法,其原理
简单易懂,可以用于各种图像处理应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、字符串匹配 字符串匹配指的是从文本中找出给定字符串(称为模式)的一个或所有出现的位置。本文的算法一律输出全部的匹配位置。模式串在代码中用x[m]来表示,文本用y[n]来,而所有字符串都构造自一个有限集的字母表Σ,其大小为σ。
根据先给出模式还是先给出文本,字符串匹配分为两类方法: · 第一类方法基于自动机或者字符串的组合特点,其实现上,通常是对模式进行预处理;
· 第二类方法对文本建立索引,这也是现在搜索引擎采用的方法。 本文仅讨论第一类方法。
文中的匹配算法都是基于这样一种方式来进行的:设想一个长度为m的窗口,首先窗口的左端和文本的左端对齐,把窗口中的字符与模式字符进行比较,这称为一趟比较,当这一趟比较完全匹配或者出现失配时,将窗口向右移动。重复这个过程,直到窗口的右端到达了文本的右端。这种方法我们通常叫sliding window。
对于穷举法来说,找到所有匹配位置需要的时间为O(mn),基于对穷举法改进的结果,我们按照每一趟比较时的比较顺序,把这些算法分为以下四种: 1. 从左到右:最自然的方式,也是我们的阅读顺序
2. 从右到左:通常在实践中能产生最好的算法 3. 特殊顺序:可以达到理论上的极限 4. 任意顺序:这些算法跟比较顺序没关系(例如:穷举法) 一些主要算法的简单介绍如下:
从左到右 采用哈希,可以很容易在大部分情况下避免二次比较,通过合理的假设,这种算法是线性时间复杂度的。它最先由Harrison提出,而后由Karp和Rabin全面分析,称为KR算法。 在假设模式长度不大于机器字长时,Shift-Or算法是很高效的匹配算法,同时它可以很容易扩展到模糊匹配上。 MP是第一个线性时间算法,随后被改进为KMP,它的匹配方式很类似于自动机的识别过程,文本的每个字符与模式的每个字符比较不会超过logΦ(m+1),这里Φ是黄金分隔比1.618,而随后发现的类似算法——Simon算法,使得文本的每个字符比较不超过1+log2m,这三种算法在最坏情况下都只要2n-1次比较。(抱歉限于我的水平这一段既没看懂也没能查证,大家就看个意思吧) 基于确定性有限自动机的算法对文本字符刚好只用n次访问,但是它需要额外的O(mσ)的空间。 一种叫Forward Dawg Matching的算法同样也只用n次访问,它使用了模式的后缀自动机。 Apostolico-Crochemore算法是一种简单算法,最坏情况下也只需要3n/2次比较。 还有一种不那么幼稚(Not So Naive)的算法,最坏情况下是n平方,但是预处理过程的时间和空间均为常数,而且平均情况下的性能非常接近线性。
从右到左 BM算法被认为是通常应用中最有效率的算法了,它或者它的简化版本常用于文本编辑器中的搜索和替换功能,对于非周期性的模式而言,3n是这种算法的比较次数上界了,不过对于周期性模式,它最坏情况下需要n的二次方。 BM算法的一些变种避免了原算法的二次方问题,比较高效的有:Apostolico and Giancarlo算法、Turbo BM算法和Reverse Colussi算法。 实验的结果表明,Quick Search算法(BM的一个变种)以及基于后缀自动机的Reverse Factor和Turbo Reverse Factor算法算是实践中最有效的算法了。 Zhu and Takaoka算法和BR算法也是BM的变种,它们则需要O(σ2)的额外空间。
特殊顺序 最先达到空间线性最优的是Galil-Seiferas和Two Way算法,它们把模式分为两部分,先从左到右搜索右边的部分,如果没有失配,再搜索左边的部分。 Colussi和Galil-Giancarlo算法将模式位置分为两个子集,先从左至右搜索第一个子集,如果没有失配,再搜索剩下的。Colussi算法作为KMP算法的改进,使得最坏情况下只需要3n/2次比较,而Galil-Giancarlo算法则通过改进Colussi算法的一个特殊情况,把最坏比较次数减少到了4n/3。 最佳失配和M最大位移算法分别根据模式的字符频率和首字位移,对模式位置进行排序。 Skip Search,KMP Skip Search和Alpha Skip Search算法运用“桶”的方法来决定模式的起始位置。
任意顺序 Horspool算法也是BM的一个变种,它使用一种移位函数,而与字符比较顺序不相干。还有其他的变种如:Quick Search算法,Tuned Boyer-Moore算法,Smith算法,Raita算法。
在接下来的章节中,我们会给出上面这些算法的实现。我们把字母表限定为ASCII码或者它的任意子集,编程语言用C,这就意味着数组索引是从0开始,而字符串以NULL结尾。
(第一章完。好像这些算法被挨个夸了个遍,反而不知道该选哪一种了,老外介绍别人的东西时就是这样,尽来虚的。)
二、穷举与自动机
穷举法又叫暴力法。大多数程序员眼里,它是幼稚的,但大师们不这么认为。
Rob Pike, 最伟大的C 语言大师之一, 在《Notes on C Programming》中阐述了一个原则:花哨的算法比简单算法更容易出bug、更难实现,尽量使用简单的算法配合简单的数据结构。而Ken Thompson——Unix 最初版本的设计者和实现者,禅宗偈语般地对Pike 的这一原则作了强调: 拿不准就穷举(When in doubt , use brute force)。 而对于装13爱好者来说,更是自豪的称其使用的是BF算法。
穷举法用在字符串匹配上,简单的描述就是,检查文本从0到n-m的每一个位置,看看从这个位置开始是否与模式匹配。这种方法还是有一些优点的,如:不需要预处理过程,需要的额外空间为常数,每一趟比较时可以以任意顺序进行。
尽管它的时间复杂度为O(mn),例如在文本"aaaaaaaaaaaaaaaaaaaaaaaaaaa"中寻找"aaaaab"时,就完全体现出来了。但是算法的期望值却是2n,这表明该算法在实际应用中效率不低。
C代码如下: 1. void BF(char *x, int m, char *y, int n) {
2. int i, j; 3. 4. /* Searching */ 5. for (j = 0; j <= n - m; ++j) { 6. for (i = 0; i < m && x[i] == y[i + j]; ++i); 7. if (i >= m) 8. OUTPUT(j); 9. } 10. } 11. 如果我们注意到C库函数是汇编优化过的,并通常能提供比C代码更高的性能的话,我们可以用memcmp来完成每一趟比较过程,从而达到更好的性能: 1. #define EOS '\0'
2. 3. void BF(char *x, int m, char *y, int n) { 4. char *yb; 5. /* Searching */ 6. for (yb = y; *y != EOS; ++y) 7. if (memcmp(x, y, m) == 0) 8. OUTPUT(y - yb); 9. } 10. 11. 自动机的方法其实和穷举法有点相似,都是用最简单直白的方式来做事情。区别在于穷举法是在计算,而自动机则是查表。尽管自动机的构造过程有一点点难解,要涉及到DFA的理论,但是自动机的比较过程那绝对是简单到无语。
简单说来,根据模式串,画好了一张大的表格,表格m+1行σ列,这里σ表示字母表的大小。表格每一行表示一种状态,状态数比模式长度多1。一开始的状态是0,也就是处在表格的第0行,这一行的每个元素指示了当遇到某字符时就跳转到另一个状态。每当跳转到最终状态时,表示找到了一个匹配。
语言表述起来还是比较啰嗦,看代码就知道了: 1. #define ASIZE 256
2. 3. int preAut(const char *x, int m, int* aut) { 4. int i, state, target, old; 5. 6. for (state = 0, i = 0; i < m; ++i) { 7. target = i + 1; 8. old = aut[state * ASIZE + x[i]]; 9. aut[state * ASIZE + x[i]] = target; 10. memcpy(aut + target * ASIZE, aut + old * ASIZE, ASIZE*sizeof(int)); 11. state = target; 12. } 13. return state; 14. } 15. 16. 17. void AUT(const char *x, int m, const char *y, int n) { 18. int j, state; 19. 20. /* Preprocessing */ 21. int *aut = (int*)calloc((m+1)*ASIZE, sizeof(int)); 22. int Terminal = preAut(x, m, aut); 23. 24. /* Searching */ 25. for (state = 0, j = 0; j < n; ++j) { 26. state = aut[state*ASIZE+y[j]]; 27. if (state == Terminal) 28. OUTPUT(j - m + 1); 29. } 30. } (注:原文的代码使用一个有向图的数据结构,我遵循大师的指引,改用了更简单一点的数组)
从代码上我们很容易看出,自动机的构造需要时间是O(mσ),空间也是O(mσ)(严格来说这份代码使用了O((m+1)σ)),但是一旦构造完毕,接下来匹配的时间则是O(n)。
匹配的过程前面已经说了,太简单了没什么好说的,这里就解释一下构造过程吧!