计算机控制系统自学课件 第3章 数学描述
合集下载
最新东北大学自动化复习精品课件6计算机控制系统数学描述

东北大学·
1.1 学习本教学模块所需掌握的基础知识
熟悉
1、连续系统的s传递函数模型
2、连续系统的稳定性分析问题
掌握
1、z变换与z反变换方法 2、零阶保持器的作用特性
1.2 本教学模块解决的问题
被控对象—数学模型 控制器设计 控制系统—性能指标
• 系统的稳定性 • 系统的稳态指标 • 系统的暂态指标
1.3 关于被控对象的模型表达
传递函数模型 (外部描述)
1、连续 s 传递函数 2、离散 z 传递函数
状态空间模型 (内部描述)
1、连续状态空间模型 2、离散状态空间模型
1.4 关于系统的稳定性
一个系统稳定是指该系统在平衡状态下(其输出量为
不随时间变化的常数或零),受到外部扰动作用而偏 离平衡状态,当扰动消失后,经过一段时间,系统能 够回到原来的平衡状态(这种意义下的稳定通常称为 渐进稳定)。 如果不能回到原平衡状态,则该系统不稳定。 线性系统的稳定性是由系统本身固有的特性决定的,
· 教学单元一结束·
而与系统外部输入信号的有无和强统稳定的充要条件是: 系统的特征方程的所有特征根,亦即系统传递 函数的所有极点都分布在s平面的左半平面,s平面的 虚轴为稳定边界。
关于系统的稳定性
连续系统稳定性判断方法: (1)代数判据:劳斯判据,胡尔维茨判据等 (2)根轨迹方法 (3)频率域方法:奈奎斯特判据,波特图法等
计算机控制系统
教学模块3 计算机控制 系统数学描述与性能分 析
东北大学·
本教学模块内容:
教学单元1-模块导学 教学单元2-脉冲传递函数模型的建立
教学单元3-计算机控制系统的稳定性分析
教学单元4-计算机控制系统的稳态与暂态
1.1 学习本教学模块所需掌握的基础知识
熟悉
1、连续系统的s传递函数模型
2、连续系统的稳定性分析问题
掌握
1、z变换与z反变换方法 2、零阶保持器的作用特性
1.2 本教学模块解决的问题
被控对象—数学模型 控制器设计 控制系统—性能指标
• 系统的稳定性 • 系统的稳态指标 • 系统的暂态指标
1.3 关于被控对象的模型表达
传递函数模型 (外部描述)
1、连续 s 传递函数 2、离散 z 传递函数
状态空间模型 (内部描述)
1、连续状态空间模型 2、离散状态空间模型
1.4 关于系统的稳定性
一个系统稳定是指该系统在平衡状态下(其输出量为
不随时间变化的常数或零),受到外部扰动作用而偏 离平衡状态,当扰动消失后,经过一段时间,系统能 够回到原来的平衡状态(这种意义下的稳定通常称为 渐进稳定)。 如果不能回到原平衡状态,则该系统不稳定。 线性系统的稳定性是由系统本身固有的特性决定的,
· 教学单元一结束·
而与系统外部输入信号的有无和强统稳定的充要条件是: 系统的特征方程的所有特征根,亦即系统传递 函数的所有极点都分布在s平面的左半平面,s平面的 虚轴为稳定边界。
关于系统的稳定性
连续系统稳定性判断方法: (1)代数判据:劳斯判据,胡尔维茨判据等 (2)根轨迹方法 (3)频率域方法:奈奎斯特判据,波特图法等
计算机控制系统
教学模块3 计算机控制 系统数学描述与性能分 析
东北大学·
本教学模块内容:
教学单元1-模块导学 教学单元2-脉冲传递函数模型的建立
教学单元3-计算机控制系统的稳定性分析
教学单元4-计算机控制系统的稳态与暂态
计算机控制技术课件 第三章 数字控制技术
若Fm=0,表明加工点m在圆弧上; Fm>0,表明加工点在圆弧外; Fm<0,表明加工点在圆弧内。 由此,第一象限逆圆弧逐点比较插补的原理是:从圆
弧的起点出发, 当Fm≥0,为了逼近圆弧,下一步向-x方向进给一步,
并计算新的偏差; 若Fm<0,为了逼近圆弧,下一步向+y方向进给一步,
并计算新的偏差。 如此一步步计算和一步步进给,并在到达终点后停止
3.1.1 数控技术发展概况
5、数控系统的组成 数控系统一般由数控装置、驱动装置、可
编程控制器和检测装置等组成。
数控装置包括输入装置、输出装置、控制 器、插补器四大部分组成。
3.1.2 字控制原理
以计算机绘图为例,来说明数字程序控制的基本原理。
y
当给定a、b、
d
c、d各点坐
标x和y值之
后,如何确
m-
1
)
2
+
y
2 m
-
R
2=
F
m-
2
x
m
+
1
1.第一象限内的圆弧插补
②设加工点正处于m(xm,ym)点 当Fm<0时,应沿+y方向进给一步至(m+1)点。 其坐标值为: xm+1=xm ym+1=ym+1 新的加工点偏差为 Fm+1=xm+12+ym+12-R2=xm2+(ym+1)2-R2=Fm+2ym+1 可知,只要知道前一点的偏差和坐标值,就可求出
这类控制用于铣床、车床、磨床、加工中心等。
3.轮廓控制 能够控制刀具沿工件轮廓曲线不断地运动,并在运动过
程中将工件加工成某一形状。 这类控制用于铣床、车床、磨床、齿轮加工机床等。
弧的起点出发, 当Fm≥0,为了逼近圆弧,下一步向-x方向进给一步,
并计算新的偏差; 若Fm<0,为了逼近圆弧,下一步向+y方向进给一步,
并计算新的偏差。 如此一步步计算和一步步进给,并在到达终点后停止
3.1.1 数控技术发展概况
5、数控系统的组成 数控系统一般由数控装置、驱动装置、可
编程控制器和检测装置等组成。
数控装置包括输入装置、输出装置、控制 器、插补器四大部分组成。
3.1.2 字控制原理
以计算机绘图为例,来说明数字程序控制的基本原理。
y
当给定a、b、
d
c、d各点坐
标x和y值之
后,如何确
m-
1
)
2
+
y
2 m
-
R
2=
F
m-
2
x
m
+
1
1.第一象限内的圆弧插补
②设加工点正处于m(xm,ym)点 当Fm<0时,应沿+y方向进给一步至(m+1)点。 其坐标值为: xm+1=xm ym+1=ym+1 新的加工点偏差为 Fm+1=xm+12+ym+12-R2=xm2+(ym+1)2-R2=Fm+2ym+1 可知,只要知道前一点的偏差和坐标值,就可求出
这类控制用于铣床、车床、磨床、加工中心等。
3.轮廓控制 能够控制刀具沿工件轮廓曲线不断地运动,并在运动过
程中将工件加工成某一形状。 这类控制用于铣床、车床、磨床、齿轮加工机床等。
计算机控制技术PPT 第3章

3. 综合指标
在现代控制理论中,如最优控制系统的没计时,经常使用综
合性能指标来衡量一个控制系统。选择性能指标时.既要考虑
到能对系统的性能做出正确的评价,又要考虑到数学上容易处
理,以及工程上便于实现。因此,选择性能指标时,通常需要
做一定的试探和比较。综合性能指标通常有3种类型。
1)积分型指标:
(1)误差平方的积分:
3.5 线性离散时间系统的能控性与能观测性
线性定常离散时间系统的能控性定义及判据 线性定常离散时间系统的能观测性定义及判据
3.6 应用MATLAB进行离散系统分析
3.1 计算机控制系统概述
计算机控制系统(Computer Control System)是应用计算机 参与控制并借助一些辅助部件与被控对象相联系,以获得 一定控制目的而构成的系统。
为n,Qc为由系数矩阵A和B按一定规则组成的分块矩阵,
表达式是:
n为系统的维数。 判别线性定常系统能控性的判据还有 其他的形式。对于线性时变系统,判别能控性的条件要复 杂一些,而且系统是否能控,常常还依赖于初始时刻的选 取。对于完全能控的线性定常系统,通过特别选定的坐标 变换,可以将其状态方程化成标准的形式,称为能控规范 形。
3.3 控制系统的性能指标描述
对于一个控制系统来说,人们总是要求它能根据实际 的被控对象,在给定信号的作用下达到稳定、快速和准确 的性能指标。对于计算机控制系统,计算机相当于人的大 脑,因此有更多的功能可以实现,系统就能实现最佳的性 能指标。本章描述了控制系统的基本性能指标,以及这些 性能指标与系统的固有参数和设计参数的关系,从而为分 析和设计控制系统提供了依据。
计算机控制技术 --控制组件分布和集成
2008.6
《计算机控制技术》课件第3章
数字程序控制系统的插补器用于完成插补计算。插补 计算就是按给定的基本数据(如直线的终点坐标,圆弧的起 、终点坐标等),插补(插值)中间坐标数据,从而把曲线形 状描述出来的一种计算。插补器实际上是一个函数发生器 ,能按给定的基本数据,产生一定的函数曲线,并以增量 形式(例如脉冲)将各坐标连续输出,以控制机床刀具按给定
数字程序控制主要应用于机床自动控制,如用于铣床 、车床、加工中心、线切割机以及焊接机、气割机等的自 动控制系统中。采用数字程序控制系统的机床叫做数字程 序控制机床,具有能加工形状复杂的零件、加工精度高、 生产效率高、便于改变加工零件品种等许多特点,是实现 机床自动化的一个重要发展方向。
数字程序控制系统一般由输入装置、输出装置、控制 器和插补器等四大部分组成。目前硬件数控系统已很少被 采用,多数采用计算机数控系统,控制器和插补器功能以 及部分输入/输出功能都由计算机承担。
由于计算机技术、半导体技术、通信和网络技术、控 制技术、软件技术等高新科学技术的发展,工业生产过程 的控制技术也出现了飞速的发展,可编程序控制器将与其 他计算机控制装置一起成为21世纪工业控制领域的主流控 制装置。
3.1.2 顺序控制系统的组成
顺序控制系统的组成见图3-2,它由五部分组成: (1)输入接口:实现输入信号的电平转换。 (2)控制器:接收控制输入信号,按一定的控制算法运 算后,输出控制信号到执行机构。控制器具有记忆功能, 能实现所需的控制运算功能。 (3)输出接口:实现输出信号的功率转换。 (4)检测机构:检测被控对象的状态信息。 (5)显示报警装置:显示系统的输入、输出状态及报警 信息等,便于了解过程运行状态和对过程的操作、调试、 事故处理等。
下面以冷加工自动线中钻孔动力头的自动控制顺序作 为实际例子,来说明顺序控制的应用。其加工过程分为以 下几步:
第三章 控制系统的数学描述与建模(完成)
二、零极点增益模型
• 零极点模型实际上是传递函数模型的另一种表现形式,其 原理是分别对原系统传递函数的分子、分母进行分解因式 处理,以获得系统的零点和极点的表示形式。
( s − z1 )( s − z2 )...( s − zm ) G( s) = K ( s − p1 )( s − p2 )...( s − pn )
》den=[1,9,45,87,50]; [z,p,k]=tf2zp(num,den) 》 z= p= k= 0 -6 -5 -3.0000+4.0000i -3.0000-4.0000i -2.0000 -1.0000 1
s( s + 6)( s + 5) 结果表达式:G ( s ) = ( s + 1)( s + 2)( s + 3 + 4 j )( s + 3 − 4 j )
6 4 u 2 0
系统为一个两输入两输出系统 》A=[1 6 9 10; 3 12 6 8; 4 7 9 11; 5 12 13 14]; 》B=[4 6; 2 4; 2 2; 1 0]; 》C=[0 0 2 1; 8 0 2 2]; 》D=zeros(2,2);
第五节
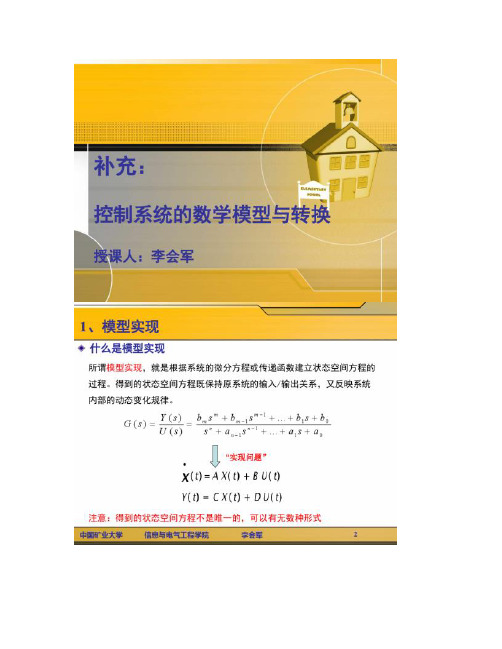
一、模型的转换
用法举例: 0 ɺ 1)已知系统状态空间模型为: x = 1
》A=[0 1; -1 -2]; B=[0;1]; 》C=[1,3]; D=[1]; 》[num,den]=ss2tf(A,B,C,D,iu) %iu用来指定第n个输入,当只有一个输入时可忽略。 》num=1 5 2; den=1 2 1; 》[z,p,k]=ss2zp(A,B,C,D,iu) 》z= -4.5616 p= -1 k=1 -0.4384 -1
计算机自动控制原理仿真自学课件 第03讲 绪论补充.
3、模型连接反馈连接 G s G1 s 1 G1 s G2 s Matlab 函数格式: [A,B,C,D]=feedback(A1,B1,C1,D1,A2,B2,C2,D2 %将两个系统按反馈方式连接,系统1为被控对象,系统2为反馈控制器。
[num,den]=feedback(num1,den1,num2,den2,sign %sign用于指示是正反馈还是负反馈,默认为负,即sign= -1。
模型连接的验证程序见Exercise2 中国矿业大学信息与电气工程学院李会军 26
4、本章小结小结主要介绍控制系统的几种数学模型,如何使用Matlab描述控制系统,以及不同模型之间的相互转换。
需要重点掌握以下内容:①控制系统中常见的几种数学模型②使用Matlab实现数学模型之间的相互转化③使用Matlab求解系统串联、并联和反馈后的系统模型中国矿业大学信息与电气工程学院李会军 27。
第3章-计算机控制理论基础
3.2 离散时间系统
线性离散系统满足叠加原理(principle of superposition)
x(k ) ax1 (k ) bx2 (k ) y(k ) P[ax1 (k ) bx2 (k )] aP[ x1 (k )] bP[ x2 (k )]
若离散系统是确定的,即它的所有参数都是确定的,否 则是不确定的。 若离散系统是可实现的,或因果的(causal)即在输入加 入之前没有响应,否则称为不可实现的(非因果的)。 若离散系统称为定常(time-invariant)或常参量(constant -parameter)的,即对时间移位输入信号的响应是时间移 位信号。它对离散时间k和延迟m的任何值都满足下式:
0 k 0
f (kT ) (t kT )e st dt
k 0 0
f (kT )e skT
k 0
变量代换,设eST=z,则
F ( z ) F (s )
* eST z
f (kT )z k
k 0
27
3.3 z变换
第三章 计算机控制理论基础
i 0 i 0
n
n
17
3.2 离散时间系统
第三章 计算机控制理论基础
离散系统分析方法
后向差分
y (k ) a1 y (k 1) an y (k n) b0 x(k ) b1x(k 1) bn x(k n)
系统的差分方程模型可以是齐次的或非齐次的;定常的 或时变的;线性的或非线性的。
又可简写为
y (k n) a1 y (k n 1) an y (k ) b0 x(k n) b1x(k n 1) bn x(k )
计算机控制技术第三章
在过程通道接口电路设计中应解决以下问题:
1.触发方式:有序的门控信号的主要作用就是 严格遵循系统工作时序要求,适时对系统中某个或某 些特定部件发出开启或关闭(触发)信号,这必然涉及 到同步触发和异步触发的方式。
2.时序:控制逻辑的结构有组合控制逻辑与存 储控制逻辑两种类型,不管哪种类型都要严格遵守规 定的操作步骤,每一个操作步骤又都是在一组有序的 控制信号驱动下实现的。
3.负载能力:一旦控制逻辑确定后,系统能否可 靠运行与器件的选择关系密切,器件的选择除了要考 虑电平的摆幅、数值、延时外,还应考虑器件所带负 载是否匹配。
3.1 数字量输入输出通道
数字量输入信号:开关闭合与断开,继电器吸合与释放(检测) 数字量输出信号:指示灯亮灭,电机的启和停,阀门的开闭(控制) 数字量信号的两个状态:导通和截止变换为二进制0和1来表示
常用的保护电路为:
输入保护电路
电平转换与保护电路组合使用的一个例子: 这时,我们可以把分压电阻去掉,用稳压二极管
3)隔离处理
从工业现场获取的开关量或数字量的信号电平往 往高于计算机系统的逻辑电平;
即使输入开关量电压本身不高,也有可能从现场 引入意外的高压信号;
因此必须采取电隔离措施,以保障计算机系统的 安全。
2.人-机交互通道
主要功能是实现人-机对话,实现操作人员与计算机 之间的信息交流。
二、输入输出接口(掌握)
接口电路起着连接过程通道与CPU的桥梁作用, 它的基本任务有:
1.控制信息的传递路径:即根据控制的任务在 众多的信息源中进行选择;
2.控制信息传送的顺序:计算机控制的过程就 是执行程序的过程,为确保进程正确无误,接口电路 应根据控制程序的要求,适时地发出一组有序的门控 信号。以确定该信息传送的路径和目的地。
WX03_微型计算机控制技术_第三章_改aPPT课件
设计方法设计PID控制器。
微型计算机控制技术
3.1 模拟化设计方法及其步骤(掌握)
连续系统:
输入R(t)
微型 计算机
输出通道 D/A
输出C(t)
被控对象
输入通道 A/D
• 输入输出均为模拟量: • 被控对象、A/D、微型计算机、D/A组成。
微型计算机控制技术
作为连续控制系统的结构图
R(s) +
D(s)
➢所谓差分变换法,就是将微分方程中的导 数变换为差分形式。首先把模拟调节器传 递函数转换成微分方程,再用差分方程近 似该微分方程。
– 后向差分 f (k) f (k) f (k 1) – 前向差分 f (k) f (k 1) f (k)
为便于编程,离散化只采用后向差分法。 并且这样会使系统具有更好的稳定性。
微型计算机控制技术
第3章 数字控制器的模拟化设计方法
微型计算机控制技术
在数字控制系统中,数字调节器最主要 的任务是执行反映控制规律的控制算法,并 把计算结果送到执行机构,实现对被控对象 的控制。
r(t)+ -
模
模
e(t)
拟 输
e(k)
计
u(k)
入
算
通
机
拟 输
u(t)
执 行
x(t)
被 控
出
机
对
通
构
象
z
1 1
T
2 T
s s
2
T 2
s s
2 Ts 2 Ts
2T
即s可近似为:
(3 6)
s
2 T
z z
1 1
2 T
1 1
z 1 z 1
(3 7)
微型计算机控制技术
3.1 模拟化设计方法及其步骤(掌握)
连续系统:
输入R(t)
微型 计算机
输出通道 D/A
输出C(t)
被控对象
输入通道 A/D
• 输入输出均为模拟量: • 被控对象、A/D、微型计算机、D/A组成。
微型计算机控制技术
作为连续控制系统的结构图
R(s) +
D(s)
➢所谓差分变换法,就是将微分方程中的导 数变换为差分形式。首先把模拟调节器传 递函数转换成微分方程,再用差分方程近 似该微分方程。
– 后向差分 f (k) f (k) f (k 1) – 前向差分 f (k) f (k 1) f (k)
为便于编程,离散化只采用后向差分法。 并且这样会使系统具有更好的稳定性。
微型计算机控制技术
第3章 数字控制器的模拟化设计方法
微型计算机控制技术
在数字控制系统中,数字调节器最主要 的任务是执行反映控制规律的控制算法,并 把计算结果送到执行机构,实现对被控对象 的控制。
r(t)+ -
模
模
e(t)
拟 输
e(k)
计
u(k)
入
算
通
机
拟 输
u(t)
执 行
x(t)
被 控
出
机
对
通
构
象
z
1 1
T
2 T
s s
2
T 2
s s
2 Ts 2 Ts
2T
即s可近似为:
(3 6)
s
2 T
z z
1 1
2 T
1 1
z 1 z 1
(3 7)