2009自适应信号处理第06章归一化与频域LMS自适应滤波器
基于LMS算法自适应滤波器的设计

叙述了对LMS算法产生的影响和原因。
最后,对一些著名的自适应波束形成方法进行 概要的介绍和比较,对最常用的LMS自适应算法做 了改进,同时在MATLAB平台上进行了仿真。
原理
2
3
自适应LMS算法的研究
LMS算法的比较与阵列分析
4
自适应滤波器的概述
自适应滤波器的发展历程 B.Widrow等人于1975年提出了自适应滤 波理论以来,以自适应滤波为主的信号处理已 成为信息科学的一个重要的分支。 自适应滤波在信道均衡、回波抵消、谱线 增强、噪声抑制、天线自适应旁瓣抑制、雷达
自适应滤波器的一般形式
自适应滤波器的结构
I. 无限长冲激响应(IIR)滤波器 IIR型结构滤波器的传输函数既有零点又有 极点。其主要的缺点是稳定性不好,并且相位 特性难于控制。
II.有限长冲激响应(FIR)滤波器 FIR滤波器是全零点滤波器,它始终是稳 定的,且能实现线性的相移特性,因此它在自 适应滤波中得到最广泛的应用。 实现结构:横向型、对称横向型、格形
期望输出的运行结果
实际输出的运行结果
误差值的统计结果
由图可见,滤波器的实际输出与期望响应之间的均方 误差较小,变步长的效果也比较明显。 计算机仿真结果表明提出的基于误差归一化的变步长 LMS 算法有快速的收敛能力很好的跟踪能力和较小的稳态 误差在自适应天线系统中有很强的应用潜能文中还分析了参
基于LMS算法的自适应滤波器设计

基于LMS算法的自适应滤波器设计自适应滤波器是信号处理中常用的一种技术,可以根据输入信号的统计特性来调整滤波器参数,以实现信号的去噪、谱线增强等功能。
LMS (Least Mean Square,最小均方误差)算法是自适应滤波器中最常用的一种算法,它通过调整滤波器的权值,使得滤波器的输出信号与期望输出信号之间的均方误差最小。
本文将详细介绍基于LMS算法的自适应滤波器设计。
首先,我们先来了解LMS算法的原理。
LMS算法的核心思想是通过不断迭代调整滤波器的权值,使得滤波器的输出信号最小化与期望输出信号之间的均方误差。
算法的迭代过程如下:1.初始化滤波器权值向量w(0)为0;2.对于每个输入信号样本x(n),计算滤波器的输出信号y(n);3.计算实际输出信号y(n)与期望输出信号d(n)之间的误差e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤2-4,直到满足停止条件。
在LMS算法中,滤波器的权值更新公式为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n+1)为更新后的权值向量,w(n)为当前的权值向量,μ为步长参数(控制权值的调整速度),e(n)为误差信号,x(n)为输入信号。
1.确定输入信号和期望输出信号的样本数量,以及步长参数μ的值;2.初始化滤波器的权值向量w(0)为0;3.依次处理输入信号样本,在每个样本上计算滤波器的输出信号y(n),并计算出误差信号e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤3-4,直到处理完所有的输入信号样本;6.得到最终的滤波器权值向量w,即为自适应滤波器的设计结果。
在实际应用中,自适应滤波器设计的性能往往与步长参数μ的选择密切相关。
较小的步长参数会使得权值更新速度过慢,容易出现收敛慢的问题;而较大的步长参数可能导致权值在稳定后开始震荡,使得滤波器的性能下降。
学习笔记-最小均方(LMS)自适应滤波
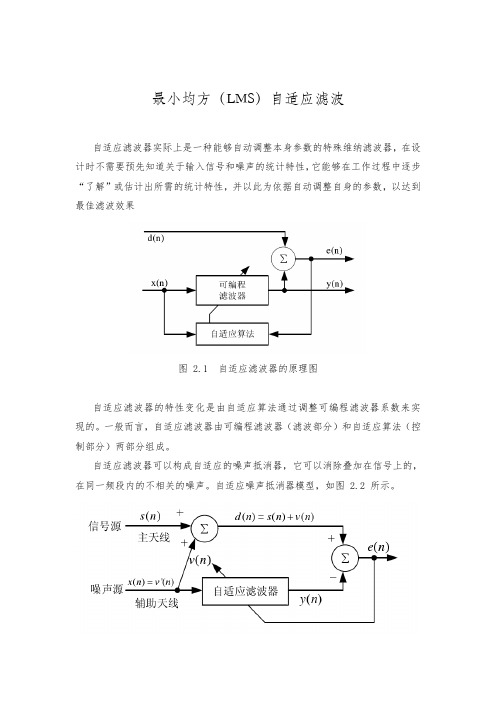
最小均方(LMS)自适应滤波自适应滤波器实际上是一种能够自动调整本身参数的特殊维纳滤波器,在设计时不需要预先知道关于输入信号和噪声的统计特性,它能够在工作过程中逐步“了解”或估计出所需的统计特性,并以此为依据自动调整自身的参数,以达到最佳滤波效果图 2.1 自适应滤波器的原理图自适应滤波器的特性变化是由自适应算法通过调整可编程滤波器系数来实现的。
一般而言,自适应滤波器由可编程滤波器(滤波部分)和自适应算法(控制部分)两部分组成。
自适应滤波器可以构成自适应的噪声抵消器,它可以消除叠加在信号上的,在同一频段内的不相关的噪声。
自适应噪声抵消器模型,如图 2.2 所示。
图 2.2 自适应噪声抵消器模型最小均方(LMS )算法是基于最小均方误差(MMSE )准则的维纳滤波器和最陡下降法的基础上,由 Widrow 和 Hoff 于 1960 年提出的。
固定步长最小均方(LMS )自适应算法也常称为标准 LMS 算法,它以期望响应和滤波输出信号之间误差的均方值最小为目标,它依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最优的自适应迭代算法。
下面以横截型结构的自适应 FIR 滤波器为例,进行最小均方算法的公式推导。
图 2.3 自适应横截型滤波器结构框图设滤波器系数矢量为()()()()T M n w n w n w n w ][121-= ,滤波器抽头输入信号矢量为()()()()T M n x n x n x n x ]11[+--= ,自适应横截型滤波器结构框图,如图 3.1 所示。
滤波器输出信号()n y 为:()()()()()i n x n w n x n w n y M i i T-=*=∑-=10 上式中“T ”表示转置,n 为时间指针,M 为滤波器长度。
那么滤波器误差信号 e(n)表示为:()()()()()()n x n w n d n y n d n e T *-=-=基于 Widrow Hoff 的 LMS 算法,即随机梯度法,采用瞬时()()n x n e 2-来替代上式()()[]n x n e E 2-的估计运算,则有迭代公式:()()()()n x n e n w n w **+=+μ21其中 µ 是步长因子。
数字信号处理中的自适应滤波算法

数字信号处理中的自适应滤波算法自适应滤波算法在数字信号处理领域中扮演着重要的角色。
它们能够自动地根据输入信号的特性调整滤波器参数,以达到最佳的滤波效果。
本文将介绍几种常见的自适应滤波算法及其应用。
一、最小均方(LMS)算法最小均方(Least Mean Square, LMS)算法是最简单、常用的自适应滤波算法之一。
它的基本思想是通过最小化预测误差的均方差来更新滤波器参数。
LMS算法的原理如下:1. 初始化滤波器系数向量w和适当的步长参数μ。
2. 对于每个输入信号样本x(n),计算滤波器输出y(n)。
3. 计算预测误差e(n) = d(n) - y(n),其中d(n)是期望输出。
4. 更新滤波器系数向量w(n+1) = w(n) + 2μe(n)x(n)。
5. 重复步骤2至4,直到达到收敛条件。
LMS算法的优点是实现简单,适用于多种信号处理问题。
然而,它对信号的统计特性敏感,收敛速度较慢。
二、最小均方归一化(NLMS)算法最小均方归一化(Normalized Least Mean Square, NLMS)算法是对LMS算法的改进,可以有效地解决LMS算法中的收敛速度慢的问题。
NLMS算法的主要改变是利用输入信号的能量对步长参数进行归一化。
其具体步骤如下:1. 初始化滤波器系数向量w和适当的步长参数μ。
2. 对于每个输入信号样本x(n),计算滤波器输出y(n)。
3. 计算预测误差e(n) = d(n) - y(n)。
4. 计算输入信号能量ρ(n) = x(n)·x(n)。
5. 更新滤波器系数向量w(n+1) = w(n) + (2μ/ρ(n))e(n)x(n)。
6. 重复步骤2至5,直到达到收敛条件。
NLMS算法通过对步长参数进行归一化,使其与输入信号能量相关联。
这样一来,相对于LMS算法,它能够更快地收敛。
三、迫零(RLS)算法迫零(Recursive Least Squares, RLS)算法是一种递归算法,也是自适应滤波算法中最常用的一种。
自适应信号处理
自适应信号处理-唐正必马长芳科学出版社赵春晖哈尔滨工程大学出版社本书全面系统地阐述了自适应信号处理的理论及其应用,包括确定性信号与随机过程(平稳与非平稳信号)滤波检测理论,不用训练序列的本身自适应的盲信号处理理论,从一维到多维、线性到非线性、经典自适应到神经智能自适应等近代信号处理。
它将信息论、时间序列分析、系统辨识、谱估计理论、高阶谱理论、优化理论、进化计算,以及神经网络理论等学科知识综合而成一体。
本书共十章,内容有自适应滤波基本原理、自适应LMS滤波器、自适应RLS滤波器、自适应格型滤波器、自适应递归滤波器、自适应谱线增强与谱估计、自适应噪声干扰抵消器、自适应均衡器、自适应阵列处理与波束形成,以及自适应神经信息处理。
对于盲信号处理的理论与方法,将分散在最后三章中论述。
本书取材新颖,内容丰富;叙述深入浅出,系统性强,概念清楚。
它总结了自适应信号处理的最新成果,其中包括作者在该领域内所取得的科研成果,是一部理论联系实际的专业理论专著。
可作为信息与通信、雷达、声纳、自动控制、生物医学工程等专业的研究生的教材或主要参考书,也可供广大科研人员阅读。
第1章绪论1.1 自适应滤波的基本概念1.2 自适应信号处理的发展过程1.3 自适应信号处理的应用第2章维纳滤波2.1 问题的提出2.2 离散形式维纳滤波器的解2.3 离散形式维纳滤波器的性质2.4 横向滤波器的维纳解第3章最小均方自适应算法3.1 最陡下降法3.2 牛顿法3.3 LMS算法3.4 LMS牛顿算法第4章改进型最小均方自适应算法4.1 归一化LMS算法4.2 块LMS算法4.3 快速块LMS算法第5章最小均方误差线性预测及自适应格型算法5.1 最小均方误差线性预测5.2 Lev ins on-Durbi n算法5.3 格型滤波器5.4 最小均方误差自适应格型算法第6章线性最小二乘滤波6.1 问题的提出6.2 线性最小二乘滤波的正则方程6.3 线性最小二乘滤波的性能6.4 线性最小二乘滤波的向量空间法分析第7章最小二乘横向滤波自适应算法7.1 递归最小二乘算法7.2 R LS算法的收敛性7.3 R LS算法与LMS算法的比较7.4 最小二乘快速横向滤波算法第8章最小二乘格型自适应算法8.1 最小二乘格型滤波器8.2 LSL自适应算法第9章非线性滤波及其自适应算法9.1 非线性滤波概述9.2 Volterra级数滤波器9.3 LMS Volterra级数滤波器9.4 R LS Volterra级数滤波器9.5 形态滤波器结构元优化设计的自适应算法9.6 自适应加权组合广义开态滤波器9.7 层叠滤波器的自适应优化算法第10章自适应信号处理的应用10.1 自适应模拟与系统辨识10.2 自适应逆模拟10.3 自适应干扰对消10.4 自适应预测计算机实验实验1 LMS算法的收敛性实验2 LMS自适应线性预测实验3 LMS自适应模型识别实验4 LMS自适应均衡实验5 RLS自适应线性预测实验6 RLS自适应模型识别实验7 RLS自适应均衡实验8 自适应格型块处理迭代算法仿真附录A 矩阵和向量A.1 矩阵A.2 向量A.3 二次型……附录B 相关矩阵附录C 时间平均相关矩阵参考文献《自适应信号处理》课程教学大纲课程编号:S0105603C课程名称:自适应信号处理开课院系:电子与信息技术研究院任课教师:邹斌(副教授)胡航(副教授)先修课程:数字信号处理适用学科范围:信息与通信工程学时:36 学分:2.0开课学期:春季学期开课形式:课堂讲授课程目的和基本要求:本课程是一门理论性较强、并在实际中获得广泛应用的课程。
《自适应滤波器原理》课件
自适应滤波器原理:通过调整滤波 器的参数,使滤波器的输出接近期 望输出
减小稳态误差的方法:调整滤波器 的参数,使其更接近期望输出
添加标题
添加标题
添加标题
添加标题
稳态误差:滤波器在稳态条件下的 输出误差
性能优化:通过减小稳态误差,提 高自适应滤波器的性能
调整滤波器参数,如调整滤波 器阶数、调整滤波器系数等
军事领域:用于 雷达信号处理, 提高探测精度
工业领域:用于 机器故障诊断, 提高生产效率
深度学习算法:利用神经网络进行自适应滤波 强化学习算法:通过强化学习实现自适应滤波器的优化 遗传算法:利用遗传算法进行自适应滤波器的参数优化 模糊逻辑算法:利用模糊逻辑进行自适应滤波器的决策和控制
FPGA实现:利用FPGA的灵活性和并行性,实现自适应滤波器 ASIC实现:利用ASIC的高性能和低功耗,实现自适应滤波器 专用芯片实现:设计专用芯片,实现自适应滤波器 云计算实现:利用云计算平台的计算资源,实现自适应滤波器
特点:全局搜索能力强,收 敛速度快
原理:通过模拟鸟群觅食行 为,寻找最优解
应用:广泛应用于自适应滤 波器、神经网络等领域
优缺点:优点是简单易实现, 缺点是容易陷入局部最优解
采用快速傅里叶变 换(FFT)算法, 减少计算量
利用并行计算技术, 提高计算速度
采用稀疏矩阵算法 ,减少存储需求
采用低复杂度算法 ,如LMS算法,减 少计算量
挑战:如何提高自适应滤波器的性能和稳定性,降低成本,提高可靠性,以及如何应对新的应 用场景和需求。
汇报人:
,
汇报人:
01
02
03
04
05
06
添加标题
自适应滤波器:一种能够根据输入信号的变化自动调整滤波器参数 的滤波器
LMS自适应滤波器的DSP实现
LMS自适应滤波器的DSP实现LMS(最小均方)自适应滤波器是一种常用的数字信号处理(DSP)技术,用于降噪、信号增强和系统辨识等应用。
本文将详细介绍LMS自适应滤波器的DSP实现。
在DSP实现LMS自适应滤波器时,首先需要选择合适的数字信号处理器。
常用的信号处理器有FPGA和DSP芯片两种。
FPGA芯片具有较大的并行计算能力和灵活可编程性,适合用于实现复杂的算法和系统。
而DSP芯片则更适合用于实现实时的信号处理任务,因为其专门设计用于数字信号处理,具有更低的功耗和更好的实时性能。
DSP实现LMS自适应滤波器的关键是实现滤波器的更新算法。
常用的更新算法有递推最小二乘(RLS)算法和快速递归(QR)算法。
在LMS算法中,每个采样点的更新公式如下:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)表示第n个采样点时的滤波器系数,μ是自适应步长参数,e(n)是误差信号,x(n)是输入信号。
DSP实现LMS自适应滤波器的主要步骤为:1.初始化滤波器系数:将滤波器系数初始化为适当的值,通常为0。
2.获取输入信号:通过ADC(模数转换器)从外部设备(如麦克风、传感器)读取模拟信号,并进行数字化处理。
3.计算输出信号:将输入信号与滤波器系数相乘,得到滤波器的输出信号。
4.计算误差信号:将期望输出信号与实际输出信号之间的差异作为误差信号。
5.更新滤波器系数:根据误差信号和输入信号,使用LMS更新算法更新滤波器系数。
6.输出结果信号:将滤波器的输出信号通过DAC(数模转换器)转换为模拟信号,输出到外部设备(如喇叭、显示器)。
在DSP实现LMS自适应滤波器时,需要注意以下几点:1.选择合适的自适应步长参数:自适应步长参数μ的选择直接影响滤波器的收敛性和稳定性。
通常需要根据具体应用和性能要求进行调整。
2.处理滤波器的边界效应:滤波器系数更新时,需要考虑边界效应。
一种常见的方法是在输入信号和滤波器的右侧增加一些零值。
信号处理课件第6章无限冲激响应(IIR)滤波器设计

3. 滤波器的技术要求
低通:
:通带允许的最大衰减; :阻带内应达到的最小衰减
单位 (dB)
若幅度下降到 0.707, 则幅平方下降 0.5 (半 功率点):
若幅度下降到 0.01:
高通:
:通带允许的最大衰减; :阻带内应达到的最小衰减
带通:
:通带允许的最大衰减; : 阻带内应达到的最小衰减
带阻:
最直接到方法,将:
p ,s , p ,s
利用:
利用上一节的方法,可设计出模拟滤波器
G( p), G(s)
H(z)
H (z) G(s) s 1 ln z Ts
但这样做,H (z) 将不再是 z 的有理多项式,给
极-零分析带来困难。
数字滤波器的 单位抽样响应
模拟滤波器 的冲激响应
令:
冲激响应 不变法
(2)
b, a 是AF LP 的分子、分母的系数向量,B, A是转换后 的的分子、分母的系数向量;在(1)中,Wo是低通或 高通滤波器的截止频率;在(2)中,Wo是带通或带阻 滤波器的中心频率,Bw是其带宽。
4.bilinear.m :双线性变换,由模拟滤波器 得到数字滤波器。
[Bz, Az]=bilinear(B, A, Fs) 式中B, A分别是G(s)的分子、分母多项式 的系数向量,Bz, Az分别是H(z)的分子、分 母多项式的系数向量,Fs是抽样频率。
2. 切比雪夫I型(Chebyshev-I)滤波器
3. 切比雪夫II型滤波器
4. 椭圆滤波器
Un2() :Jacobian 函数 本课程只讨论 Butterworth 和 Chebyshev-I
滤波器的设计
二、Butterworth滤波器的设计
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ˆ 将 J (n) 对 w ( n + 1) 求导,得到
∂J (n) ˆ ˆ = 2 ( w (n + 1) − w (n) ) − λ *u(n) ˆ ∂w (n + 1)
令这个偏导数等于零,得到
ˆ ˆ w (n + 1) = w (n) +
2009年3月28日
λ*
2
u ( n)
ˆ w H (n + 1)u(n) = d (n)
NLMS 滤波器收敛速度高于 LMS 滤波器
当 N LM S 中 u (n)
2
很小时,会产生计算问题
μ δ + u ( n)
u( n)e* (n) 2
ˆ ˆ w (n + 1) = w (n) +
2009年3月28日
δ >0
哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
2009年3月28日
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
二、频域LMS自适应滤波器
问题引出:当输入信号持续时间长时,要求滤波器具有 很长的冲激响应(或者说大量的寄存器单元),这样会 大大增加计算的复杂度。 (一)分块自适应滤波器(block-adaptive filter)
由于失调与u(n)成正比,当u(n)比较大时,LMS滤波 器会出现“梯度噪声放大”问题。 希望使滤波器与输入信号强度无关—— 归一化LMS自适应滤波器(Normalized LMS Filter) (一)NLMS自适应滤波器
NLMS滤波器的结构与标准LMS滤波器结构相同
2009年3月28日
哈尔滨工业大学信息工程系 邹斌
归一化与频域LMS自适应滤波器
一、归一化LMS自适应滤波器
最小扰动准则(principle of minimal disturbance)
自适应滤波器的加权向量在一次迭代到另一次迭代的过程中, 其变化在一定滤波输出限制条件下,应当保持最小。
NLMS滤波器设计问题——受限优化问题
给定抽头输入向量 u ( n) 以及理想输出 d ( n) ,
ˆ ˆ w (n + 1) = w (n) +
μ
u ( n)
2
Байду номын сангаас
u ( n )e ( n )
*
ˆ ε ( n) = w − w ( n)
ε (n + 1) = ε( n) −
μ
u ( n)
u ( n ) e* ( n ) 2
根据 NLMS 命题,可以采用均方偏差 D (n) 对其稳定度进行分析
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
H
λ
2
ˆ u H (n)u(n) = w H (n)u(n) +
λ
2
u ( n)
2
从而
λ=
2e ( n ) u ( n)
2
ˆ e(n) = d (n) − w H (n)u(n)
ˆ 进而得到加权向量变化 δ w ( n + 1) 的最优值
ˆ ˆ ˆ δ w (n + 1) = w (n + 1) − w (n) = 1 u ( n) u(n)e* (n) 2
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
一、归一化LMS自适应滤波器
NLMS滤波器结构示意图
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
一、归一化LMS自适应滤波器
2009年3月28日
NLMS算法的实现步骤
哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
二、频域LMS自适应滤波器
分块LMS算法
对于第k个数据块,将由所有i得到的u(kL+i) e (kL+i)取和 以实现对抽头加权向量的更新
ˆ ˆ w (k + 1) = w (k ) + μ ∑ u( kL + i )e( kL + i )
i =0 L −1
L −1 i =0
定义 M × 1 互相关向量 φ(k )
⎧ ⎡ ξ (n)e* (n) ⎤ ⎫ ⎡ e( n ) 2 ⎤ ⎪ ⎪ D (n + 1) − D (n) = μ 2 E ⎢ ⎥ − 2μ E ⎨Re ⎢ u ⎥⎬ 2 2 ⎢ u( n) ⎥ ⎢ u ( n) ⎥ ⎭ ⎪ ⎣ ⎣ ⎦ ⎦⎪ ⎩
误差随更 新次数增 加而减小
取模和 数学期望
ξu (n) 称为非扰动误差信号(undisturbed error signal)
误差信号在输入端与输入信号同步被分成L点的数据块, 用于计算滤波器的加权值。 误差信号e(kL+i)在自适应过程中随数据块不同而变化。
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
ˆ y (kL + i ) = w T (k )u(kL + i ) ˆ = ∑ w j (k )u (kL + i − j ),
j =0 M −1
i = 0,1, … , L − 1
令d(kL+i)表示相应的理想输出,误差信号e(kL+i)为
e( kL + i ) = d ( kL + i ) − y ( kL + i )
L=4,M=6的数据块
ˆ 对于这个输入的数据块,滤波器的抽头加权向量为 w ( k )
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
二、频域LMS自适应滤波器
滤波器对于输入信号向量u(kL+i)的相应输出为
ˆ 确定更新抽头加权值向量 w ( n + 1) ,在限制条件
ˆ w H ( n + 1)u ( n ) = d ( n)
下,可以使加权向量变化 ˆ ˆ ˆ δ w ( n + 1) = w ( n + 1) − w ( n) 的 Euclidean 模的平方最小。
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
n = kL + i, i = 0,1, … , L − 1 k = 1, 2, …
哈尔滨工业大学信息工程系 邹斌
T
T
2009年3月28日
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
二、频域LMS自适应滤波器 L −1 对于第k个数据块,输入数据为 {u(kL + i )}i =0 AT (k ) = [u(kL), u(kL + 1), … , u(kL + L − 1) ] 写成矩阵形式为
ˆ ξ u ( n) = ( w − w ( n) ) u ( n)
H
= ε H (n)u(n)
当下列等式满足时,NLSM在均方误差意义下是稳定的
2 Re E ⎡ξu (n)e* (n) / u(n) ⎤ ⎣ ⎦ 0<μ <2 2 2 E ⎡ e( n ) / u ( n ) ⎤ ⎣ ⎦
{
}
哈尔滨工业大学信息工程系 邹斌
为了控制迭代中加权向量的变化不改变其方向, 引入一个正的实数加权因子 μ
2009年3月28日 哈尔滨工业大学信息工程系 邹斌
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
一、归一化LMS自适应滤波器
ˆ ˆ ˆ δ w (n + 1) = w (n + 1) − w (n) =
自适应信号处理
归一化与频域LMS自适应滤波器
Adaptive Signal Processing
归一化与频域LMS自适应滤波器
一、归一化LMS自适应滤波器
2 均方偏差定义为 D(n) = E ⎡ ε(n) ⎤ ⎣ ⎦
ε(n + 1) = ε(n) −
μ
u ( n)
2
u ( n ) e* ( n )
一、归一化LMS自适应滤波器
(二)NLMS自适应滤波器的稳定性 假定理想输出可以表示为
d ( n) = w H u ( n) + ν ( n)
w 是模型未知参数, ν ( n ) 是加性扰动
ˆ 由 NLMS 得到的抽头加权值向量 w (n) 是对 w 的估计。 估计误差由加权误差向量 ε(n) 表示
e(k ) 为误差信号向量
φ(k ) = ∑ u( kL + i )e(kL + i ) = AT ( k )e(k )
e(k ) = [ e(kL), e( kL + 1), … , e( kL + L − 1) ]
T