基于CAN总线的异步电动机保护及在线监测系统_熊小伏
基于CAN总线的分布式光伏电力设备监测系统

基于CAN总线的分布式光伏电力设备监测系统余运俊;张燕飞;万晓凤;郑博福;杨晓辉【摘要】为方便对分布式光伏发电设备运行状态进行实时的监测,设计了基于CAN 总线的设备监测系统.该系统以TMS320F28335为控制器对光伏电力设备的各种状态参数进行采集,通过CAN总线与工控机构成通信网络,利用工控机实现对光伏发电设备运行状态的集中显示,从而更加直观地了解各设备的运行状态,同时便于应用各种算法,实现微网控制功能.实验结果表明,该监测系统运行稳定、实时性高,能够长时间在线实时监测,取得了良好的效果.【期刊名称】《电源技术》【年(卷),期】2016(040)007【总页数】4页(P1450-1453)【关键词】分布式光伏发电;CAN总线;TMS320F28335;设备监测系统【作者】余运俊;张燕飞;万晓凤;郑博福;杨晓辉【作者单位】南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031;南昌大学环境工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031【正文语种】中文【中图分类】TM615分布式光伏发电是一种新型的、具有广阔发展前景的、可提高能源综合利用效率和供电可靠的发电方式[1]。
它倡导就近发电,就近并网,就近转换,就近使用的原则,有效地解决了电能在高压输电过程中的损耗问题。
分布式光伏发电一般建在用户侧,具有容量小、投资小、清洁环保、供电可靠和发电方式灵活等优点,可以应用在工业厂房、公共建筑及居民屋顶上[2]。
近年来,分布式光伏发电与建筑一体化结合得到了越来越广泛的应用,经常作为建筑物的主要电能来源[2]。
在分布式光伏发电组件系统中主要包括太阳能光伏电池板、环境仪、光伏防雷汇流箱、蓄电池组和光伏逆变器等设备,以一学校建筑物为依托,共有六个屋顶,在每个屋顶上都安装一套发电功率最大为20 kW的太阳能光伏组件,为保证该发电系统安全、经济、稳定运行,需要对各设备的运行状况进行实时地监测,并把采集到有关数据传送至工控机,通过工控机强大的数据处理和分析能力,对采集的各种状态参数进行分析处理,并通过工控机上的监测界面对各设备的运行状态进行集中显示,实现对分布式光伏电力设备的有效监测,对该发电系统安全、经济和稳定运行具有十分重要的现实意义。
基于CAN总线的微机继电保护系统

基于CAN总线的微机继电保护系统尹海彪;桂峰【摘要】介绍了一种基于CAN总线的电力系统微机继电保护系统设计,设计了该微机保护系统总体结构,分析了传统模拟式继电保护装置的不足,给出了系统的硬件设计与软件设计流程。
系统串行通信采用CAN现场总线技术,提高了通信的快速性、可靠性。
%This paper introduces a power system microcomputer relaying protective system based on CAN bus. It illustrates briefly the total structure of the microcomputer protective system, and analyzes the shortage of the traditional analog relaying protection device. It also gives the system hardware and software design flow. The serial communication of this system adoptes CAN field bus, enhancing communication rapidity and reliability,【期刊名称】《通信电源技术》【年(卷),期】2012(029)003【总页数】2页(P50-51)【关键词】继电保护;CAN总线;微机;电力系统【作者】尹海彪;桂峰【作者单位】武汉理工大学自动化学院,湖北武汉430070;武汉理工大学自动化学院,湖北武汉430070【正文语种】中文【中图分类】TM615;TM7640 引言电力系统继电保护装置是通过测量线路或电气设备的一些电气参量,判别电力系统的正常、不正常工作及故障运行状态,从而动作于断路器跳闸或发出警示信号[1]。
传统模拟式继电保护装置是通过硬件电路测量线路电气参数,与整定值比较来判断线路是否发生故障,可靠性与抗干扰能力差。
基于CAN总线的蓄电池智能监测系统

基于CAN总线的蓄电池智能监测系统
郭屹松;李铁香
【期刊名称】《计算机测量与控制》
【年(卷),期】2006(14)5
【摘要】介绍了一种具有CAN总线接口的蓄电池在线监测系统,采用两级网络结构,以Cygnal公司的C8051F045微控制器为测量系统的核心,实现测量控制、数据处理、参数设置、显示报警、通讯等功能,底层是以智能监测芯片DS2438构成的检测板,安装在每只蓄电池上,负责蓄电池电压、电流、温度等参数的在线采集,通过单总线与微控制器通讯;C8051F045通过CAN总线与监控主机通讯,实现了蓄电池的远程实时监测和管理,保障了蓄电池的可靠工作.
【总页数】3页(P616-618)
【作者】郭屹松;李铁香
【作者单位】北京石油化工学院,信息工程学院,北京,102617;北京石油化工学院,信息工程学院,北京,102617
【正文语种】中文
【中图分类】TP274
【相关文献】
1.基于DSP与CAN总线的旋转机械分布式智能监测系统 [J], 阳小燕;刘义伦;金晓宏
2.基于CAN总线的C-GIS智能监测系统设计 [J], 涂水金
3.基于CAN总线的汽车电子智能监测系统 [J], 王雪梅
4.基于GPRS与CAN总线的水情智能监测系统的设计与实现 [J], 王俊飞;朱里红
5.基于CAN总线的C-GIS智能监测系统设计 [J], 涂水金
因版权原因,仅展示原文概要,查看原文内容请购买。
异步电机在线监测
异步电机在线监测和故障诊断的研究摘要:本文针对异步电机的典型故障特征,结合定子电流频谱法,对FFT分析方法在异步电机稳态情况下故障诊断技术和小波包分析方法在异步电机故障诊断技术进行了深入地研究,并通过理论分析和仿真实验验证了诊断方法的正确性与可行性。
关键词:异步电机、傅里叶变换、小波包分析Abstract:Aim at the fault feature of the asynchronous motors,Combing with the theory of stator current spectroscopic analysis,this paper study the Fast Fourier Transform diagnosis technology of fault feature of the asynchronous motors in stable state in deeply,and study the Wavelet Packet transform diagnosis technology of fault feature of the asynchronous motors ,these methods are all proved true and necessary through the theory analysis and simulating experiments.Key Word:asynchronous motor,Fourier Transform,Wavelet Packet1 选题的意义及国内外研究现状1.1选题的目的及意义现代工业生产及我们的日常生活,几乎离不开各种各样的电机。
异步电机因其结构简单、坚固耐用、控制简单、使用方便以及能适用于各种复杂的工作环境而广泛应用于人类社会的生产和生活中,是一种用量最大、覆盖面最广的电机。
在实际运行中,异步电机的故障不仅会损坏电机本身,而且会影响整个生产系统,甚至会危及人身安全,造成巨大的经济损失和恶劣的社会影响。
基于CAN总线的电动轮自卸车运行状态监测系统设计

集也成 为研究 的主要趋势 IJ 4。文 中研究 的 14 5 T交 流 电传 动
电动轮 自卸车主要 由柴 油发动 机、 电机 、 发 电动 轮、 电气 系统 、
液压 系统 、 底盘 和车厢组 成 。整 车 的动力来 自柴 油 发动机 , 与 它同轴的发电机发 出的 电力 , 电气系统控 制供 给电动轮 里的 经
针对 自卸车 中几 个 主要 系统具 备 了成熟 的 电控技 术 和总 线通 信技术 的实 际情况 , 中设 计 的监 测 系统 直接 通 过 C N 文 A
图2
一
程 序 设 计 流 程 图
总线 与电动轮 自卸 车内部控 制器进行通 信 , 来获取 监测 自卸车
运行状 态的参数 。这样 可以在充分利用 现有技术 的基 础上 , 以 最少 的硬件达到 系统 的要求 , 仅节 约 了成本 , 缩短 了 系统 不 也
各个功能模块 以任务线程 的方 式进行调 度 , 样可 以提 高系统 这
的实时性和可维护性 。
态进行实时监测 , 以及时 了解 自卸车及各 部分的工作状况 , 发现
问题 , 从而保证其可靠 、 连续地运行具有 十分重要的意义。
1 14 5 T交流 电传动 电动轮 自卸 车系统组成
11 工 作 原 理 .
o cec n eh ooy,in tn4 10 , hn ;. in tnE eti n fc rn o , t. X a ga 12 1 C ia f i ea dT c n lg X a ga 12 1 C ia2 Xa g l rcMa ua ti gC . L d , in tn4 1 0 , hn ) S n a c u
CAN总线在电动机保护中的应用研究的开题报告

CAN总线在电动机保护中的应用研究的开题报告该开题报告旨在介绍CAN总线在电动机保护中的应用研究,包括研究背景、研究目的、研究内容、研究方法、研究过程等方面。
一、研究背景随着现代工业的发展,电动机作为一种最常用的工业驱动器,在工业自动化领域得到了广泛应用。
而电动机的保护是电气自动化控制系统的重要组成部分,对保证生产安全和稳定运行起着至关重要的作用。
目前,电动机保护方案主要依赖于过流保护、过载保护、短路保护和接地保护等,但这些方案都存在着不同程度的缺陷,例如保护精度不高、诊断速度较慢、易受外部干扰等。
因此,需要探索新的电动机保护方法,提高保护精度和效率。
二、研究目的本研究的目的是探索CAN总线在电动机保护中的应用,通过引入CAN总线技术,将电动机保护升级为一个智能化、网络化的保护系统,能够对电动机进行实时监控和预警,有效解决现有保护方案存在的问题。
三、研究内容(1)搭建CAN总线网络架构,实现与电动机控制器之间的数据交换和通信。
(2)设计电动机保护算法,包括过载、短路、接地和过流等方面的保护,并采用故障诊断技术,提高系统诊断速度。
(3)借助嵌入式系统和CAN接口芯片,实现CAN通信协议的解析和数据的收发。
(4)建立实验平台,开展电动机保护方面的实验,验证CAN总线在电动机保护中的应用。
四、研究方法本研究主要采用实验方法和模拟分析方法。
在实验方面,通过搭建实验平台,完成对电动机保护算法的实现和测试验证。
在模拟分析方面,通过借助仿真软件,进行电动机保护算法的仿真分析和优化设计,提高系统的性能和可靠性。
五、研究过程(1)文献调研:对CAN总线和电动机保护等方面的相关文献进行综合分析和总结,确定研究方向和关键技术。
(2)CAN总线网络架构:设计CAN总线网络架构,并完成相关硬件和软件的选择和配置。
(3)电动机保护算法设计:根据电动机的特性和运行情况,设计电动机保护算法,并采用故障诊断技术,提高系统的效率。
基于CAN总线的智能小车控制系统研制概要
西南交通大学硕士学位论文基于CAN总线的智能小车控制系统研制姓名:张文杰申请学位级别:硕士专业:机械电子工程指导教师:肖世德20090401摘要智能小车是一个集环境感知、规划决策、自动行驶等功能于一身的光机电一体化系统,它集中运用了计算机、传感、信息、通信、导航、人工智能及自动控制等高新技术。
CAN总线是一种具有高保密性、高抗干扰能力、有效支持分布式控制和实时控制的串行通信网络。
本论文将当前流行的CAN现场总线技术应用到智能小车上,为西南交通大学机电测控实验中心研制分布式控制的智能小车实验平台。
论文首先概要介绍了与智能小车相关的机器人领域和智能车辆领域的研究现状,给出了以电动小车为物理平台的智能小车的概要设计。
然后介绍了智能小车运动控制系统的硬件电路的设计与实现。
智能小车选择飞利浦公司的 LPC2290微控制器作为核心处理器,利用其高速的处理能力和芯片内部集成的丰富的外设接口资源,并结合CAN总线接口为智能小车提供了一个功能强大并具有一定扩展性的硬件平台。
论文结合嵌入式系统的特点说明了在智能小车中引入嵌入式操作系统的价值,介绍了嵌入式操作系统u C/OS—II在微处理器LPC2290的移植过程和开发方法。
论文根据智能小车各个模块的功能,详细描述了小车控制系统各个任务的执行流程。
由于采用了统一的CAN总线通讯协议,使得各个模块避免了重复繁琐的底层软硬件开发和调试工作,提高了智能小车开发效率。
研制的智能小车样机初步实验证明了本文叙述的技术方案的有效性和正确性,对于智能运输车辆开发具备一定参考和实用价值。
关键词:智能小车; 运动控制; CAN总线; 嵌入式系统;la C/OS—IIABSTRACTIntelligent vehicle is an integration system of optical system and mechatronics system combined with environmental perception、path planning and decision making and automatic driving functions using computer, sensing, information, communications,navigation,artificial intelligence and automatic control technology. CAN Bus is a type of serial communication network with many features such as high confidentiality,hi曲anti—interference ability,the effective support of distributedcontr01and real—time contr01mode. A distributed control experiment platform of intelligent vehicle is designed based on CAN bus technologyin mechatronics measuring and monitoring experiment center of Southwest Jiaotong University.At first,the key technology of intelligent vehicle is summarized in the paper. And then the design of control circuit and interface circuits for intelligent vehicle are presented.With high processor speed and abundant interface support LPC2290is used as the core processor of contr01circuits.It can afford an extensible platform for the intelligent vehicle combined with the application of CAN bus.Combined with the characteristics of embedded system the value of embedded operating system which is introduced into the intelligent vehicle is showed.The whole process of la C/OS——II operating system is migrated to LPC2290CPU. Based on the functions of intelligent vehicle the flow chart of every task module is described in thepaper.It is independent between modules and convenient for mutual communication by application of CAN Bus.Owning to the use of uniform communication agreement,we can avoid repeated bottom development or debugging of software and hardware.The test shows that the intelligent vehicle design is the effectiveness and correctness that can be taken as a reference for the intelligent transport vehicles. Keywords:InteI I igent VehiCle:Motion OontroI:CAN—Bus:Embedded System; uC/OS—II西南交通大学曲南爻遗大罕学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
基于CAN总线的某随动系统故障检测装置的设计
基于CAN总线的某随动系统故障检测装置的设计王圣旭;游藩;陈敏;王强;孟祥明【摘要】In order to solve the problem that signal is easily disturbed during its long distance transmission,in this paper, a design scheme of the CAN bus based fault detection device is proposed for a certain type of rocket launcher servo system. The CAN bus module and the related data acquisition module’s software and hardware design. Through the measurement of the condi⁃tion parameters such as hydraulic,air pressure and voltage of servo system,and the reasoning by the fault diagnosis expert sys⁃tem,this device can realize the fault detection which is completed by automatic diagnosis primarily,and if necessary supported by the artificial diagnosis. With strong ability of anti⁃interference andreal⁃time,the CAN bus based communication scheme not only can be applied to the research and development,but also can be extended to the fault detection for other analog signal elec⁃tromechanical equipments,especially to the multiunit distributed state monitoring and fault diagnosis.%为了解决信号在远距离传输过程中容易受到干扰的问题,在此提出一种基于CAN总线的某型火箭炮随动系统故障检测装置的设计方案,重点讲述了CAN总线通信模块及与之相关的数据采集模块的软硬件设计。
基于CAN总线的分布式光伏电力设备监测系统
基于CAN总线的分布式光伏电力设备监测系统
余运俊;张燕飞;万晓凤;郑博福;杨晓辉
【期刊名称】《电源技术》
【年(卷),期】2016(040)007
【摘要】为方便对分布式光伏发电设备运行状态进行实时的监测,设计了基于CAN 总线的设备监测系统.该系统以TMS320F28335为控制器对光伏电力设备的各种状态参数进行采集,通过CAN总线与工控机构成通信网络,利用工控机实现对光伏发电设备运行状态的集中显示,从而更加直观地了解各设备的运行状态,同时便于应用各种算法,实现微网控制功能.实验结果表明,该监测系统运行稳定、实时性高,能够长时间在线实时监测,取得了良好的效果.
【总页数】4页(P1450-1453)
【作者】余运俊;张燕飞;万晓凤;郑博福;杨晓辉
【作者单位】南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031;南昌大学环境工程学院,江西南昌330031;南昌大学信息工程学院,江西南昌330031
【正文语种】中文
【中图分类】TM615
【相关文献】
1.基于CAN总线的电力设备远程监控系统设计 [J], 廖毅;陈文瑛;蒋燕
2.基于NB-IoT的分布式光伏电站漏电监测系统 [J], 谢志远;张子忠;黄怡然;陈文
3.基于机器视觉的电力设备监测系统的研究 [J], 李岩;李丹;李建;腾飞
4.基于机器视觉的电力设备监测系统的研究 [J], 白鑫;毕玉冰;岳睿
5.基于嵌入式平台的分布式光伏发电监测系统 [J], 张明涛;杜威达;谢东周;彭泓因版权原因,仅展示原文概要,查看原文内容请购买。
基于CAN总线煤矿供电保护系统的研究
多个方位 的故障信号可 以通过 C N 控制器按不 同的优先级发送 A
至上位机,再 由上位机对数据报文进行 比较,从而对地址信 息 脱扣器发出指令 ,并快速 且果断的保护 断路器动作跳 闸,同时 对 上级 的微控器发 出延时的指令 。延时结束后 ,若故障仍没消 除,上位机将会对故障处上一级的微控器发出启动速 断保护指 令,以此类推,直到故障消除。进而做全方位预防与防御,从 根本上减少越级跳闸事故的发生,让煤矿生产在高度安全性 的 条件下得到 了保障。
在一定程度上威胁 了井下供 电系统的安全性及可靠性 。一旦发 惊醒故障源 的检测与判定,完成统结构框图 ( 四)系统特 点。C N 属于总线式 串行通信 网络 ,由于其 A 采用了许多新技术及独特 的设计 , 与一般 的通信总线相 比, C A N 总线的数据通信具有突 出的可靠性 、实时性与灵活性特点可概 括为 :( 1 )c A N为多主机方式工作,网络上任一个节 点均可在 任意时刻差动地 向网络上其他节点发送信息 ,而不分主从 ,通 信方式灵活,且无需站地址等节点信息。利用这一特 点可方便 地构成多机备份系统。( 2 )C N 网络上的节 点信息分成不 同的 A 优先级 ,可满足 不 同的实时要求 ,高优 先级 的数据 最多可在 1 3 4 u s内得 到传输。( 3 ) C N 采用非破坏性总线仲裁技术,当多 A 个节点同时向总线发送信息时,优先级较低 的节 点会主动地退 出发送 ,而最高优先级 的节点可不受影响地 继续传输数据 ,从 而大大节省 了总线冲突仲裁时间。尤其是在网络 负载很重的情 况下也不会 出现网络瘫痪情况 。
生越级跳闸事故 ,会导致大面积停电,进而使设备遭 到损害、 生产不能正常运行 ,更对人身安全构成威胁 ,对矿井的破坏等 后果也十分严重 因此 ,综合考虑煤矿井下 电力系统的特 点并 与 已有 的速断保护方案相结合 ,构建一个基于 C A N总线的区域 选择性连锁防越级跳闸系统显得十分 必要 。 C N ( A C o n t r o l l e r A r e a N e t w o r k )总线,又称控制器局域 网,是德因 B o s c h公司在现代汽车技术中领先推出的一种多主 机局部 网,由于其卓越的性 能,极高的可靠性,独特灵活的设 计和低廉的价格 ,现 己广泛 应用于各种电力施工领域,C A N总 线 与其它几种现场总线比较而言 ,是最容 易实现、价格最为低 廉 的一种 ,但其性能并不 比其他现场总线差。这也是 目前 C N A 总线在众多领域被广泛采用 的原因。 煤 炭 电 力系 统 的 特 点 ( 一) 现场总线系统在煤炭电力系统技术上具有 以下特点 。 系统的开放性特点。开发是指对相关标准 的一致性 、公开性, 强调对标准 的共识与遵从 。一个开放系统 ,是指它可 以与世界 上任何地方遵 守相 同标准 的其他设备或系统连接。对煤炭井下 现场环境的适应性 。作为工厂 网络底层的现场总线,是专为煤 炭 井下供 电系统的现场环境而设计的,可支持双绞线、同轴 电 缆、光缆 、射频、红外线、电力线等,具有较强的抗干扰能力, 能采用两线制实现供 电与通信 , 并可满足本质安个防爆要求等。 由于 自身原因,煤矿作为重要的井下区域变电站 ,是井下各分 采场的枢纽终端 ,对矿井 的生产及其安全性起着不容忽视的作 用 。目静变 电站 内设备巡视和操作全部靠人工操作 ,在地面说 进行调度工作 的人员对变 电站 的运行信息完全采用值班员 电话 传递的方式,因此无法直观 、快速的了解和控制变电站 的运作 情况 ,特别是当出现掉电事故时就显得更为重要 。 ( - )煤矿井下供 电系统线路 的保护原则 。为了对煤矿企 业供 电系统的设计有条理的进行整合,对煤矿井下的高压 电缆 线路一般会使用继电保护装置,并将其设为无 时限电流速 断、 过电流 以及零序保护 。当不需要考虑保护配合和过 电流保护 的 时限小于 0 . 5 s 一 0 . 7 s时, 则不需要安装 电流速 断设施进行保护 ; 变 电所引出线可 以采用瞬时 电流速 断保护的方法 ,当未能充分 满足其选择性 时,则可设置带时限的电流速断保 护。对于不是 并列运行 的分段母线,可配置 电流速 断保护 ,但 只能是 当断路
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F禁暴罐口重庆大学电气工程学院熊小伏叶有名刘
玮
基于O四总线的异步电动机保护及在线监测系
统
1异步电动机保护及监测的现状异步电动机结构简单、成本低廉、它的机械特性能满足大多数生产机械的要求,因此在轧钢、矿山机械、机床、水泵等工矿行业中广泛使用,且重要程度日益加强。随着保护装置由机电式向微机型的过渡,保护装置本身的自动化性能也越来越高但也存在一些不足。在异步电动机用量最大的工矿企业中电动机的分布是按照工序的要求而散布在整个厂区内且保护装置也是单台独立运行,这使得电动机保护装置的整定和运行管理必须由操作人员就地进行,在电动机的总数不多的情况下尚可解决,如果数量较大则需耗用大量的人力和物力。而且各类电动机内部绕组故障,如匝间短路,单相(两相)接地等一般是由于环境较差、长期运行不当等原因引起的,起初这类故障的表现往往是局部的小电流的不易监测和发现。即使由人工将各台电动机的运行数据全部采集整理,而随后从大规模的数据处理中得到及时、准确和全面的分析结果也是相当困难的。2保护及在线监测系统构成随着电子技术和网络通信的不断发展,使得自动化装置之间进行数据交换也日益普遍和重要。目前大多数的自动化装置间采用R牙一232、R牙一42、BS一485等通信方式,这些方式的低数据传输率和点对点的数据传输标准,以及在最低层上的星型拓扑都不适应工业现场控制的复杂或大规模应用。如果采用LAN组件及环型或总线拓扑,其系统造价偏高。现场总线(FieldBus)的发展解决了能经受工业现场环境和费用之间的矛盾,尤其是CAN总线的出现,其误码率
承担着CAN网络通信的功能。因此现在保护装置中采用集
成了CAN控制器和接口的微处理芯片87CI%AC,可省略专用的CAN控制器和接口器件并提高系统的可靠性
。
87CI%以是INTELMCS96系列的新成员是带有集
成
CAN20的16Mrh6l位CHMOS微控制器。它在片内集
成有
32KEpROM,IK的寄存器,256bit附加lu加。它支持高速串
行通信协议CAN20,具有8字节数据长度的巧个报文目
标,其XTCAN和RXCAN两个引脚可直接挂在总线上进行通信。在应用程序的编写上,它和80CI%KC无大的区别,多
数程序都可移植,只需编写相应的CAN总线数据通信部分。
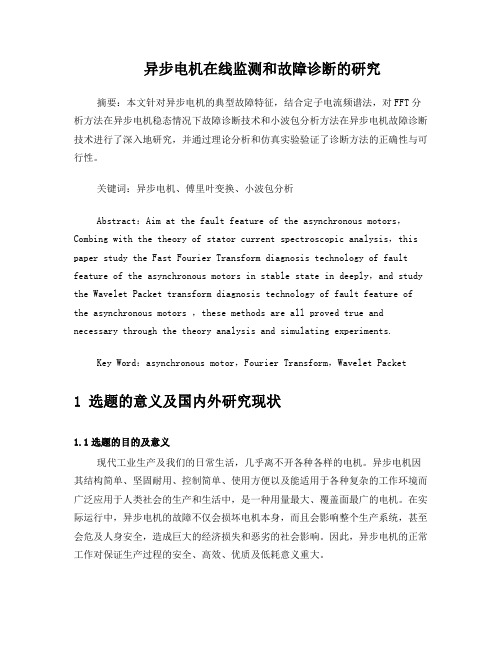
以87CI%以为控制器的保护及监测装置单元硬件构成如图2所示
。
37C196C八LP多
路开
I/V关
一曰尸一
一/一
一/
;
一
电机电机机电机机其他保护保护保护设备备1并2样n#
()l装置单元构成
图2
保护单元装置的核心部分即为87CI%以,它的运算速
度快,数据处理能力强,能胜任较复杂的数据运算。刀D变换器采用内带采样保持器的超高速12位刀D芯片M资XIM12。电流、电压信号经FV、WV中间变换器形
成适
合计算机处理的电压信号,通过低通滤波器单元PL后接至
多路开关,在CPU控制下依次将各路信号接人,并刀D转换,再对采人的数据进行计算,将计算结果与设定值比较,
决定作出相应的动作。为了尽量减少占用87CI%以的处理时间,将监测用的数据采集到一定数量后,在保护程序的运行空闲时间内以原始的采样值通过CAN网络总线传输到后台机,以供计算和分析
。
(2)CAN网络传输介质
总线的传输介质采用普通的屏蔽双绞线即可,如需进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间
加接光电隔离,电源采用DC一DC变换器等措施。(3)后台处理
系统构成
后台处理系统由含CAN适配卡的工控机和后台数据处
电气时代刀义刀年第8期F现场总线亚刀
B
璐
理程序组成。通常适配卡电路分为双口RM及其控制患路、中断申请与控制电路和内含C刊控制器的MCu80C592三部分。最后一部分也可由osC3加82C2(CN控制器构成。为提高数据交换量,双口RAM采用62256,其容量为32K字节。工控机与MCU80C592通过双口RAM控制电路对62256
进行操作。工控机对双口RAM空闲状态下,将数据和命令写人62256,然后通过中断管理电路通知MCU80C59280C592按照命令执行相应操作。当80C592收到下位节点的数据和命令时,在获得双口RAM控制权后,将其写人6艺巧6,再通过中断逻辑通知工控机取走数据和命令如图3所示。锁找垣巫亚=>PC蠢MC机CA扩卜卜UN展及总抽接线卜口图3该方案由于使用大容量双口RAM,使大量的数据交换变得较为便捷,加之上位机的寄存器映像的读写方式,使数据交换速度大大提高。另外,由于MCU负责管理与下位节点的数据交换,然后再一次性地与工控机交换数据,节省了工控机的占用时间。通常适配卡可在市面上整体购得。在软件设计中,需编写工控机与MCU之间进行数据更换的程序和MCU与下位节点间数据交换的程序。后台数据处理程序负责对整个CAN总线进行监视管理具有系统参数(如波特率、输出控制、报文标识与屏蔽等)设置、监视状态设置、数据发送、数据请求、本机状态查询、节点状态查询、中断接收数据管理、对接收的电动机各种运行参数进行分析等功能。该程序采用砚SLJALC++编写,有强大的人机交互功能,方便操作人员使用。3系统功能()l保护功能。异步电动机保护部分实现对电动机的综合保护,其具体的功能有接地保护、断相保护、短路保护、过负荷保护、不平衡过负荷保护、堵转保护、低电压和过电压保护。当电动机正常工作时,其监视的电流和电压信号通过面板上的液晶显示屏显示出来,以便就地观察,并且在微处理器空闲时定时地将采得电流和电压信号通过CAN总线传送至后台机。有故障时保护装置迅速动作,并且就地保存故障类型和时间以及其他电动机运行参数,随后通过CANBUS网络向远方后台机报告。(2)在线监测功能部分。后台机凭借其强大的功能完成保护参数的管理和监测数据的处理。)l保护参数的管理:在控制室内对所有保护装置上的各种保护整定数据的调阅、修改和整定。根据电动机的实际工作状态例如环境温度的高低、工作时间的长短、起动频率等进行动态的调整,使其能方便地适应多种工作方式。实时掌握保护装置单元自身的工作状态,如有异常,通报运行人员
。
2)监测数据的处理:从采集来的电压、电流信号中
,
分析隐含在其中的各种信息并作出其发展方向的预测。①三相运行电流、电压的监测。运行人员
可
直观地观察
电动机的机械负载轻重和供电电源的电压质量。②零序电流
的监测。零序电流的大小往往反映绕组对地绝缘的状况,监
视它能较早地防止接地故障。③负序电流的监测。负序电流的大小反映绕组相间绝缘的状况和三相电源的平衡程度,监视它能较早地防止相间短路。④过热保护的后备保护;通过电流、电压中序分量的计算也可对电动机的发热状态进行模
拟,以实现过热后备保护。⑤功率及功率因数的监测。通过电动机运行功率的记录,为运行人员提供其出力状况和效率
参数,以便合理地安排电动机的工作计划;实时得到的功率因数,为电动机的无功就地动态补偿提供依据
。⑥信息管
理。对众多的电动机建立设备信息库记录各台电动机的型号、运行方式和历史维护记录等,并根据设备状态提示状
态
检修。⑦数据通讯。将异步电动机保护及监测系统的数据上
传至厂内的综合自动化网络
。
(3)在线参数辩识功能。在电动机的出线端加大扰动或小扰动,可实现离线或在线的参数辩识。从一般化电动机模
型中可推导出作为异步电动机数学模型的派克方程。由于异
步电动机的暂态过程很短,将其略去后方程组将是三阶微分方程组。在选取了d、了q、。:为状态量后可得相应的状态方程、输出方程和稳态约束方程,为了计算方便,取电压向量
作为参考量,利用CA卜系统采集扰动后的三相电压
和电流
信号,算出尸、Q·几、肠、U和f,然后用改估算程序计
算出电动机本身的丑,、xl。、双,2、X`2。、R
m和Xm
等参数,
如果这些参数比正常状态有了大的变化则可为故障诊断提供依据。4结论
本文所叙述的系统CAN总线连网方式比以往其他通信方式更加经济,方便而且可靠。在此网络上运行的保护比单
台运行更加可靠灵活方便,而且具有更强的在线监测及管
理功能。本系统不仅可独立运行,并且可作为一个子系统接人工厂已有的自动化网络中。这是一种较适合目前工厂实际的异步电动机保护监测系统。(收稿ZOJ〕030
1
)
2电气时代2X(刃年第S期