直接驱动系统的干扰自适应滑模控制
滑模理论及其控制实例ppt课件
x2 s0
•
O(0,0)
s0 x1
s0
•A
x•0
图1 滑模控制示意图
从定义中可以看出,设计变构控制的基本步骤,它包括两个相对部分,即寻求
切换函数s(x)和寻求控制量 u (x)和u (x) 。
8
滑模控制的特性:
1)设计反馈u(x),限定是变结构的,它能将系统的运动引导到一个超平面 s(x)=0上。且系统在该滑模面上的运动是渐进稳定的。
s0 x1
s0
•A
x•0
图1 滑模控制示意图
6
滑模控制器的设计思想:设计一个控制器,将从任一点出发的状态轨线 通过控制作用拉到滑模面上,然后沿着此滑模面滑动到原点。
根据所确定的滑模面函数 s(x),设计如下形式控制律
u
u
u
( (
x) , x),
s(x) 0 s(x) 0
其中 u (x) u (x) ,使得系统在任何初始点都能在有限时间内到达滑模面,
在机器人、航空航天、电力系统、伺服系统等领域得到了广泛应用。
3
基本概念
变结构控制是一类特殊的非线性控制,其非线性表现为控制作用的不 连续性。与其他控制策略的不同之处:系统的“结构”并不固定,而是在 动态过程中,根据系统当前的状态有目的地不断变化。
结构的变化若能启动“滑动模态”运动,称这样的控制为滑模控制。 注意:不是所有的变结构控制都能滑模控制,而滑模控制是变结构控制中 最主流的设计方法。
u
u u
( (
x) , x),
s(x) 0 s(x) 0
u Rm,t R
5)什么条件下可以确保滑动模态运动的存在以及系统在进入滑动模态运动 以后能具有良好的动态特性如渐近稳定等,是变结构控制理论所要研究 的主要问题。
离散控制系统中的自适应滑模控制

离散控制系统中的自适应滑模控制离散控制系统在工业自动化领域中广泛应用,它能够对设备、机器或者过程进行稳定控制和调整。
而在离散控制系统中,自适应滑模控制则是一种常用的控制方法,它能够在不确定性、干扰和模型误差等因素存在时,获得优良的控制性能。
本文将介绍离散控制系统中的自适应滑模控制的原理、方法和应用。
一、自适应滑模控制原理自适应滑模控制是一种基于滑模控制的自适应控制方法,在离散控制系统中,滑模控制通过引入滑模面,实现对系统状态的逼近和稳定。
而自适应滑模控制则在滑模控制基础上,利用自适应技术对模型参数进行在线估计和调整,从而提高控制的鲁棒性和适应性。
自适应滑模控制的核心思想是根据系统输出和参考模型输出之间的误差来更新模型参数,以实现控制器的自适应。
通过引入自适应机制,控制器能够根据实际系统的动态特性,及时调整控制策略,从而适应系统的变化并提供优良的控制性能。
二、自适应滑模控制方法在离散控制系统中,自适应滑模控制有多种方法和策略,下面将介绍其中两种常用的方法。
1. 基于模型参考自适应滑模控制基于模型参考自适应滑模控制是一种基于参考模型的自适应控制方法,它通过对参考模型和实际系统之间的误差进行补偿,来实现控制器的自适应。
在这种方法中,首先需要建立一个合适的参考模型,然后根据系统输出和参考模型的误差信号,来实时调整控制器参数和滑模面。
2. 基于Lyapunov函数的自适应滑模控制基于Lyapunov函数的自适应滑模控制是一种基于Lyapunov稳定性理论的自适应控制方法,它通过构建Lyapunov函数,来实现系统的稳定和性能要求。
在这种方法中,通过设计Lyapunov函数和更新律,可以实现对控制器参数和滑模面的自适应调整,从而实现控制的稳定和优化。
三、自适应滑模控制的应用自适应滑模控制在离散控制系统中有广泛的应用,下面将介绍其中两个典型的应用案例。
1. 电机控制在电机控制领域中,自适应滑模控制被广泛应用于感应电机和永磁同步电机等系统。
滑模控制和滑膜变结构控制
滑模控制和滑膜变结构控制1. 引言滑模控制和滑膜变结构控制是现代控制理论中重要的控制策略,广泛应用于各个领域的控制系统中。
滑模控制通过引入一个滑模面来实现系统的稳定性和鲁棒性;滑膜变结构控制通过在线调整系统的结构以适应不确定性和外部扰动。
2. 滑模控制滑模控制最早由俄罗斯科学家阿莫斯特芬于1968年提出,并在1974年得到了进一步的发展。
滑模控制通过引入一个滑模面,将系统状态从非线性区域滑到线性区域,从而实现系统的稳定性和鲁棒性。
2.1 滑模面滑模面是滑模控制的核心概念之一,它通常由一个超平面表示,可以用数学方程描述为:s=Sx其中,s为滑模面,S为一个可逆矩阵,x为系统的状态变量。
2.2 滑模控制律滑模控制律用于调节系统状态,以使系统状态滑到滑模面上。
滑模控制律的一般形式可以表示为:u=−S−1B Tλ(s)其中,u为控制输入,B为输入矩阵,λ(s)为滑模曲线。
2.3 滑模控制的优点滑模控制具有以下几个优点:•鲁棒性强:滑模控制能够在面对参数扰动和外部干扰时保持系统的稳定性。
•快速响应:由于滑模面能够将系统状态快速滑到线性区域,使得系统具有快速响应的特性。
•无需精确模型:滑模控制不需要系统的精确模型,因此对于复杂系统的控制较为便捷。
3. 滑膜变结构控制滑膜变结构控制(SMC)由美国科学家丹尼尔·尤斯托曼在20世纪90年代末提出,是一种基于滑模控制的新型控制策略。
滑膜变结构控制通过在线调整系统的结构以适应不确定性和外部扰动,从而提高系统的鲁棒性和性能。
3.1 滑膜设计滑膜变结构控制的关键是设计一个合适的滑膜来响应系统的不确定性和扰动。
滑膜通常由一个或多个滑模面组成,通过在线调整滑膜的参数,可以适应不同的工作条件和控制要求。
3.2 滑膜变结构控制律滑膜变结构控制律的一般形式可以表示为:u=−K(θ)s−δ(θ)sign(s)其中,u为控制输入,K(θ)和δ(θ)分别为滑膜参数和输出增益,θ为参数向量,s为滑模曲线。
滑模变结构控制理论研究综述
滑模变结构控制理论研究综述滑模变结构控制理论是一种广泛应用于各种系统的控制方法。
本文旨在全面深入地探讨滑模变结构控制理论的研究现状及其发展趋势。
本文将简要介绍滑模变结构控制理论的背景和意义,以及其在各个领域的应用前景。
然后,本文将详细介绍滑模变结构控制理论的基本原理和研究现状,并针对目前存在的问题和不足进行探讨。
本文将分析滑模变结构控制理论的发展趋势,提出未来的研究方向和挑战。
滑模变结构控制理论是一种非线性控制方法,其本质是利用系统结构在动态过程中的切换来实现对系统的控制。
滑模变结构控制理论具有鲁棒性强、适应性好等优点,因而在许多领域都具有广泛的应用价值。
然而,滑模变结构控制理论在实际应用中也存在着一些问题和挑战,如抖振、控制精度等问题,因而其研究具有重要性和必要性。
滑模变结构控制理论的研究主要涉及理论研究和实际应用两个方面。
在理论研究方面,主要研究滑模面的设计、系统抖振的抑制等问题。
例如,通过设计合适的滑模面,可以使得系统状态在滑模面上滑动的过程中具有较好的动态性能和鲁棒性。
在实践应用方面,滑模变结构控制理论已被广泛应用于各种系统,如无人驾驶汽车、机器人、电力电子系统等。
随着科学技术的发展,滑模变结构控制理论的研究也在不断深入。
未来滑模变结构控制理论的发展趋势主要体现在以下几个方面:抖振的抑制:抖振问题是滑模变结构控制理论在实际应用中一个亟待解决的问题。
未来的研究将致力于寻找更有效的抖振抑制方法,提高系统的控制精度和鲁棒性。
智能优化算法的应用:随着智能优化算法的发展,未来的研究将更加注重将滑模变结构控制理论与智能优化算法相结合,以实现更高效、更精确的系统控制。
多变量系统的控制:目前滑模变结构控制理论的研究主要集中在单变量系统,而对于多变量系统的研究还比较少。
未来将加强对于多变量系统的滑模控制研究,以实现更加复杂的系统控制。
应用于更多领域:目前滑模变结构控制理论已经应用于许多领域,如无人驾驶汽车、机器人等。
电驱动车辆反馈线性化自适应滑模滑移率控制

电驱动车辆反馈线性化自适应滑模滑移率控制魏曙光;马晓军;曾庆含;刘春光【摘要】针对驱动和制动工况下电驱动汽车的滑移率控制这一强非线性和不确定性控制问题,提出了一种基于反馈线性化的自适应滑模控制(ASMC)方法。
针对车辆驱动、制动工况下的车轮滑移率进行了动力学分析,建立了统一的状态方程。
充分利用系统已知模型和参数,采用线性化反馈消除非线性变化的控制量增益系数的影响,通过对反馈项增益参数的自适应调整,适应附着路面不确定参数变化的控制要求,克服系统控制中存在的主要非线性和不确定性部分,对于系统难以建模描述部分,视为扰动,利用滑模控制抑制系统该部分的不确定性因素,同时保证系统响应的快速性,并对算法进行了Lyapunov稳定性分析。
最后,以某型电动汽车为对象进行了仿真分析,结果表明采用ASMC控制系统动态响应快、精度高、抗扰能力强,对路面参数变化具有较强的鲁棒性,同时输出控制量抖振小。
%This paper presents an adaptive sliding mode control method based on feedback linearization,targeting at the nonlinear wheel slip control system with strong uncertain both on EV acceleration and barking. After dynamic analysis of wheel slip when driving/barking an unite state equation is built. Taking full advantage of the known model and parameters,the nonlinear of control gain is eliminated through feedback linearization and self-adaptive law of feedback gain is adopted to accommodate with the variable friction in tire-road interface,which can overcome the main nonlinear factors and uncertains. Together,the unknown model and parameters is regarded as dieturbance is restrained by slid mode term which can also improve the response speed. Then the control algorithm stability is proved byLyapunov law. At last,simulation results of EV model demonstrated ASMC has rapid and precision response,little chattering and robustness to disturbance.【期刊名称】《火力与指挥控制》【年(卷),期】2016(041)006【总页数】5页(P23-27)【关键词】电动汽车;反馈线性化;自适应滑模控制;滑移率【作者】魏曙光;马晓军;曾庆含;刘春光【作者单位】装甲兵工程学院全电化技术实验室,北京100072; 装甲兵工程学院,北京100072;装甲兵工程学院全电化技术实验室,北京100072; 装甲兵工程学院,北京100072;装甲兵工程学院全电化技术实验室,北京100072; 装甲兵工程学院,北京100072;装甲兵工程学院全电化技术实验室,北京100072; 装甲兵工程学院,北京 100072【正文语种】中文【中图分类】TP273+.2一般来说车辆滑移率控制主要包括两种:驱动时的牵引力控制(TC)和制动时的防抱死控制(ABS),其主要作用是在冰、雪等低附着路面条件下,通过控制自动调节车轮力矩,确保车轮滑移率在安全范围内,避免车轮过度滑移或滑转引起车轮有效纵向驱/制动力降低,甚至危害横向行驶稳定性。
基于干扰观测器的小卫星自适应积分滑模姿态控制

基于干扰观测器的小卫星自适应积分滑模姿态控制杨新岩;廖育荣;倪淑燕【摘要】This brief designs an adaptive integral sliding mode controller to reduce the influence of flywheel friction torque and external disturbance torque were presented. Firstly, the disturbance observer is designed to offset the friction torque of the flywheel, and the conditions for the stability of disturbance observer are given. The adaptive law of the switching gain is designed to weaken the chattering problem that sliding mode controller have. Then the adaptive integral sliding mode controller is designed based on the disturbance observer and the adaptive law.The stability of the controller is proved. The simulation results show that the small satellite can achieve 0. 001 degree of attitude control precision with little chattering under the action of the controller, which proves the superiority of the controller.%针对飞轮摩擦力矩和外界干扰力矩对小卫星姿态控制精度的影响,设计了一种自适应积分滑模控制器.首先通过设计干扰观测器来补偿飞轮摩擦力矩;并给出了干扰观测器能稳定工作的条件.针对滑模控制器存在的抖振问题,通过对切换增益设计自适应律来减弱抖振;然后基于干扰观测器和自适应律设计了自适应积分滑模控制器;理论证明了该控制器的稳定性.最后通过对小卫星姿态控制进行数字仿真,在控制器作用下,小卫星实现了0. 001°的控制精度;同时具有较小的抖振幅度,证明了所设计控制器的优越性.【期刊名称】《科学技术与工程》【年(卷),期】2019(019)003【总页数】6页(P255-260)【关键词】小卫星;飞轮摩擦力矩;干扰观测器;自适应;滑模控制【作者】杨新岩;廖育荣;倪淑燕【作者单位】航天工程大学研究生院,北京 101416;航天工程大学职业教育中心,北京 101416;航天工程大学电子与光学工程系,北京 101416【正文语种】中文【中图分类】V525.1近年来,随着微机电技术和空间技术的发展成熟,小卫星受到了越来越多人的关注。
滑模控制技术在机械臂路径跟踪的应用
滑模控制技术在机械臂路径跟踪的应用一、滑模控制技术概述滑模控制技术是一种非线性控制方法,起源于20世纪50年代,最初应用于航空领域。
它的核心思想是通过设计一个滑动面,使得系统状态能够从初始状态到达这个滑动面,并在其上滑动至目标状态。
滑模控制具有快速响应、抗干扰能力强、易于实现等优点,因此在工业自动化、机器人控制等领域得到了广泛的应用。
1.1 滑模控制技术原理滑模控制技术的基本原理是选择一个合适的滑动面,使得系统状态在该面上的动态行为满足期望的性能指标。
当系统状态达到滑动面时,控制作用会使得状态沿着滑动面滑动,直至达到期望的平衡状态。
滑模控制的关键在于滑动面的设计,它决定了系统的动态性能和稳定性。
1.2 滑模控制技术特点滑模控制技术具有以下特点:- 强鲁棒性:对系统参数变化和外部干扰具有较强的不敏感性。
- 快速性:能够快速响应系统状态的变化,实现快速跟踪。
- 易于实现:控制算法结构简单,易于在数字控制系统中实现。
- 可调整性:通过调整控制参数,可以灵活地满足不同的性能要求。
二、机械臂路径跟踪问题机械臂路径跟踪是机器人技术中的一个重要问题,它要求机械臂能够按照预定的路径精确地移动,以完成各种任务。
路径跟踪的精度直接影响到机械臂的操作性能和任务完成的质量。
2.1 机械臂路径跟踪的重要性机械臂路径跟踪的精确性对于提高生产效率、保证产品质量具有重要意义。
在自动化生产线、医疗手术、空间探索等领域,精确的路径跟踪是实现高效、安全操作的基础。
2.2 机械臂路径跟踪的挑战机械臂路径跟踪面临诸多挑战,包括:- 动力学不确定性:机械臂的动力学特性可能因负载变化、磨损等因素而发生变化。
- 外部干扰:环境因素如温度、湿度、振动等可能对机械臂的运动产生影响。
- 非线性特性:机械臂的动力学模型通常具有非线性特性,增加了控制的复杂性。
三、滑模控制在机械臂路径跟踪中的应用将滑模控制技术应用于机械臂路径跟踪,可以有效提高跟踪精度和系统稳定性。
基于神经网络的自适应滑模控制算法
基于神经网络的自适应滑模控制算法一、基于神经网络的自适应滑模控制算法概述自适应滑模控制算法是一种先进的控制策略,它能够在系统存在不确定性和外部干扰的情况下,保证系统的稳定性和性能。
近年来,随着神经网络技术的发展,基于神经网络的自适应滑模控制算法逐渐成为研究的热点。
该算法通过神经网络来逼近系统的不确定性和非线性部分,从而实现对复杂系统的精确控制。
1.1 神经网络在控制算法中的应用神经网络因其强大的非线性映射能力和自学习能力,在控制系统中得到了广泛的应用。
它可以被训练来逼近任意复杂的非线性函数,这使得神经网络成为处理系统不确定性和非线性的理想工具。
1.2 自适应滑模控制算法的基本原理自适应滑模控制算法的核心思想是在系统的滑动面附近设计一个控制律,使得系统状态能够沿着滑动面滑动,最终达到期望的状态。
算法的自适应特性体现在能够根据系统状态的变化动态调整控制参数,以适应系统的变化。
1.3 基于神经网络的自适应滑模控制算法的优势将神经网络与自适应滑模控制算法相结合,可以充分发挥两者的优势。
神经网络能够处理系统的不确定性和非线性,而自适应滑模控制算法能够保证系统的稳定性和性能。
这种结合不仅提高了控制算法的鲁棒性,还增强了其适应性。
二、基于神经网络的自适应滑模控制算法的关键技术基于神经网络的自适应滑模控制算法涉及多个关键技术,包括神经网络的设计、训练、参数调整以及滑模控制律的设计等。
2.1 神经网络的设计神经网络的设计是算法成功的关键。
需要选择合适的网络结构、激活函数和学习算法,以确保网络能够有效地逼近系统的不确定性和非线性部分。
2.2 神经网络的训练神经网络的训练是算法实施的基础。
通过大量的训练数据,网络可以学习到系统的动态特性,从而提高控制算法的性能。
2.3 参数调整策略参数调整策略是算法自适应性的核心。
需要设计合适的调整机制,使得控制参数能够根据系统状态的变化动态调整,以适应系统的变化。
2.4 滑模控制律的设计滑模控制律的设计是算法实现稳定性和性能的关键。
自适应控制理论及其应用
自适应控制理论及其应用随着现代技术的不断发展,控制系统自适应性逐渐成为了控制理论研究的重要方向之一。
自适应控制理论在自动控制系统中得到了广泛应用,能够适应各种复杂变化的环境、情况和参数。
本文将介绍自适应控制理论的基本原理和应用。
一、自适应控制理论原理自适应控制理论是一种基于自适应算法的控制理论,主要解决控制系统中参数难以确定、无法稳定、受到干扰等问题。
自适应控制系统通过对输入和输出信号进行在线模型修正,从而达到适应环境和提高性能的目的。
常见的自适应控制方法有模型参考自适应控制法、最小均方自适应控制法、神经网络自适应控制法和滑模自适应控制法等。
其中,最小均方自适应控制法是应用最广泛的自适应控制方法之一。
最小均方自适应控制法是一种基于最小均方误差的自适应控制方法。
该方法在控制系统中建立实时反馈机制,通过不断调整控制器参数来实现控制。
在控制系统中,该方法可以提高控制系统的响应速度和稳定性,适应环境变化和干扰等问题。
二、自适应控制理论应用自适应控制理论在工程领域中得到了广泛应用,涉及到许多行业,如机械制造、电子、自动化控制、信息等。
下面就具体介绍一些应用。
1. 机械制造领域中的应用在机械制造领域,自适应控制理论的应用非常广泛,主要用于生产过程中的自动控制、质量控制和检测等方面。
通过在机械系统中加入传感器和信号处理设备,实现对加工过程和产品质量的实时监测和控制,从而提高了生产效率和产品质量。
2. 电子行业中的应用在电子行业中,自适应控制理论主要用于电路控制、电源控制、数字信号处理等方面。
应用自适应算法技术,可以解决电路中的非线性问题、稳定性问题、电源调节问题等,从而提高了电路的性能和稳定性。
3. 自动化控制领域中的应用在自动化控制领域中,自适应控制理论可以应用于诸如温度、压力、流量的自适应调节和定位控制等方面。
应用自适应控制技术,可以实现对自动化系统的实时控制和调节,从而提高控制系统的性能和稳定性。
4. 信息领域中的应用在信息领域中,自适应控制理论主要应用于数据处理、机器学习等方面。
船舶运动自适应滑模控制(沈智鹏著)PPT模板
4.3基于混沌粒子群算法的欠驱 动船舶自动靠泊迭代滑模控制
参考文献
第4章基于强化学 习的欠驱动船舶 运动自适应迭代 滑模控制
4.1基于强化学习的欠驱动船 舶路径跟踪自适应迭代滑模 控制
4.1.2船舶路 径跟踪控制 器设计
4.1.1问题 描述
船舶运动自适 应滑模控制 (沈智鹏著)
演讲人 2 0 2 X - 11 - 11
目 录
0 1 前言
0 2 第1章绪论
0 3 第2章全驱动船舶轨迹跟踪的自适应滑模控制
0 4 第3章欠驱动船舶轨迹跟踪的自适应滑模控制
05
第4章基于强化学习的欠驱动船舶运动自适应迭代滑模控制
06
第5章基于Lyapunov稳定性的欠驱动船舶运动自适应迭代滑 模控制
01
前言
前言
02
第1章绪论
第1章绪论
1.1自适应滑模控制概述 1.2船舶运动控制概述 参考文献
第1章绪论
1.1自适应滑模控制概述
A
1.1.1滑模 控制简介
B
1.1.2经典 自适应与 滑模控制
C
1.1.3反演 自适应与 滑模控制
D
1.1.4智能 自适应与 滑模控制
第1章绪论
1.2船舶运动控制概述
第3章欠驱动船 舶轨迹跟踪的自 适应滑模控制
3.3基于神经网络和动态面的 欠驱动船舶轨迹跟踪自适应 滑模控制
01
3.3.1基于神经网络 的欠驱动船舶轨迹 跟踪自适应滑模控
制
02
3.3.2基于动态面和 最小参数法的欠驱 动船舶轨迹跟踪自
适应滑模控制
第3章欠驱动船舶轨迹跟踪 的自适应滑模控制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
务1 訇 似 直接驱动系统的干扰自适应滑模控制 Disturbance adaptive sliding mode control for direct drive system 张燕荣 ZHANG Yan—rong (西安理工大学高等技术学院,西安710082) 摘 要:针对直线进给驱动系统设计了一种干扰自适应离散滑模控制器(DADSC)。通过测量电机输出 力和被测结构模态的主动阻尼对干扰力进行了预测,并将控制律表示成为干扰力的函数。干 扰力的精确预测被用来主动补偿控制器带宽范围内机床结构模态的低频部分。与传统的级联 控制器(cc)相比,所设计的DADSO算法不仅具有较大的控制带宽,较强的抗干扰性和鲁棒 性,而且显著提高了直接驱动系统的动态刚度。 关键词:直接驱动;干扰预测;干扰自适应;滑模控制 中圈分类号:TG502.1 3 文献标识码:A 文章编号:1 009—01 34(201 3)09(上)一0042—04 Doi:1 0.3968l/J.issn.1 009-01 34.201 3.09(上).1 2
0 引言 对直线伺服系统的实时有效控制。 高速高精度直接驱动系统在数控机床中的应 本文提出了一种可对摩擦力和切削力等 用越来越广泛,与传统的基于伺服电机的滚珠丝 干扰进行补偿的干扰自适应离散滑模控制器 杠驱动系统相比,其具有高速、高加速、大行(DADSC),其有效提高了控制带宽,精确预测 程、低摩擦和无齿隙等优点,而且没有滚珠丝杠 了干扰力,并对机床的结构振动进行了补偿。所 传动中存在的轴向振动和扭转振动,因此,其具 设计的控制器结构与传统级联控制器(CC)较为相 有较高的运动控制精度Ⅲ。 似,但其有效提高了进给系统的动态刚度和对干 然而,直接驱动的主要缺点是伺服系统动态 扰力预测的精确性。本文首先设计了DADSC, 刚度较低,由于省略了中间机械减速装置,使得 并将其与CC的性能进行了对比分析。接着,对干 切削力等其它干扰力不经过衰减可直接反作用 扰力复原及其在结构振动补偿中的应用进行了研 于直线电机,这就需要提高传动系统自身的刚度 究。最后,通过实验验证了所设计DADSC算法的 来抵抗干扰力。众多文献对提高直接驱动伺服系 有效性和可行性。
统的刚度进行了研究。文献【2】针对直接驱动电 1 控制器设计 机易受负载扰动及参数变化影响等问题,设计了 直线驱动系统的动力学方程可表示如下: u—Hoo速度控制器,其对负载扰动和参数不确定 + : 、+ 、 … 性具有较强的鲁棒性。文献【3】采用二阶滑模超螺 式中,x为驱动系统位移,F 和Fd分别为系统 旋算法对力矩电机系统进行控制,较好地消除了 的驱动力和干扰力。 时变负载和参数摄动对系统性能的影响,同时削 k时刻的位置误差和速度误差可表示为如下离 弱了滑模控制的输入抖振。文献[4】通过广义预测 散形式: 控制器代替比例位置控制器来提高系统刚度并补 1: -I)+ ,, (2) 偿机床的弯曲模态
。文献【5】基于cSPACE提供的 j一 一 7’’ ~
MATLAB接口模块,通过图形方式实时观察直线 ) (k-1)+ + )一 )一
电机运行的轨迹、在线修改控制器参数,实现了 式中,k为采样计数器,xr为系统指令位移。
收稿日期:2013-05-10 作者简介:张燕荣(1970一),女,讲师,硕士,研究方向为数控加工及装备制造技术。
【42】 第35卷第9期2013-09(上) l 匐 似 1.1干扰自适应离散滑模控制器(DADSC) 对文献【6】中所设计的DADSC进行改进,可得 具有结构振动补偿的直接驱动控制系统。定义滑 模面方程如下: )=Xe, )+ ) (3) 式中,入为控制器带宽增益。 基于LyapLu1oV稳定性理论可得系统驱动力为I :
)= )+ 《)})一 (k)+bk(k)+mXev )(4) 式中,K为反馈增益, 为干扰力的估计值, 其可表示如下: )=一【鱼 孚l ) (5) 式中,g。和g:为可调自适应增益。将式(2)、 (4)和(5)代入式(3)并简化可得闭环系统的动力学方 程为: {1 ([ l+g一2RQ+gR g.gl R ](6) 【 )J 。lLg:Q—t Q儿 一1)J。【 J J 式中,Q=1+KT,R=m~T。(g2Q—g1)决定了干 扰力估计值与滑模面之间的耦合,通过选择g2=Q‘ gl ̄-T进行解耦。解耦后的DADSC比CC具有更好 的干扰估计性能。 1.2级联控制器(cc) 传统级联速度环和位置环的控制器如图1所 示,速度环采用比例积分(PI)调节实现了闭环控 制,位置环采用比例(P)调节实现了闭环控制。同 时,为了提高控制精度,采用了速度与加速度反 馈控制。 图1普通级联控制器结构 图1中,K, 和Ti均为控制增益,T为采样时 间,x为输出位移,Xr为指令位移,F 为驱动力, F 为干扰力。 由图1.-3"知,CC的闭环动力学方程为: {黝= { +㈤㈣+{一 式中,Q =1+m~KpT,g ~KpT。 1.3 CC与DADSC的对比 由于式(7)中g2--0,所以,无法将干扰估计项 与等效滑模面解耦。而且,速度误差项ev(k)不能 从闭环动力学方程中消除,因此,其将误差引入 到了滑模面方程s(k)和干扰估计项 )中。因此, 与CC相比,DADSC具有更好的抗干扰性能。 假定驱动系统可完全由动力学方程(1)来描 述,则干扰传递函数x(z)/Fd(z)可表示为:
: 三: 二!) (8) z)m(z—ly z一1) 吒 (z -1X z一1)+Tz(r4z一 ) z一1)
式中,r。~r5的取值如表1所示。 表1 r1~r5的取值
在保持其他参数不变的情况下,通过增大反 馈增益r2和干扰自适应增益r4可见解耦干扰估计项 和取消速度误差项带来的优点。如图2所示,随着 r:和r4的增大,CC中干扰传递函数的极点开始离开 实轴,系统进入欠阻尼状态并出现振荡。然而, 无论r2与r4增大到何种程度,DADSC的极点将保 持过阻尼状态且从不会离开实轴。由干扰传递函 数的Bode图(图2(b))可知,与CC相比,DADSC可 增大系统的动态刚度和抗干扰能力。
图2干扰传递函数的极点分布图和Bode图 2干扰复原及其在振动控制中的应用 虽然DADSC比CC具有更强的抗干扰性能,但 其干扰估计项 ( )对控制带宽具有较强的依赖 性,然而,实际中控制带宽较低,因此,DADSC 难以直接应用。这里通过干扰复原算法来提高干 扰估计的准确性。由式(6)可知,干扰力Fd(k)可表 示为:
)=去(.(Q+蜀 ) )一 Q—g。 一1)一QFa(k一1))(9)
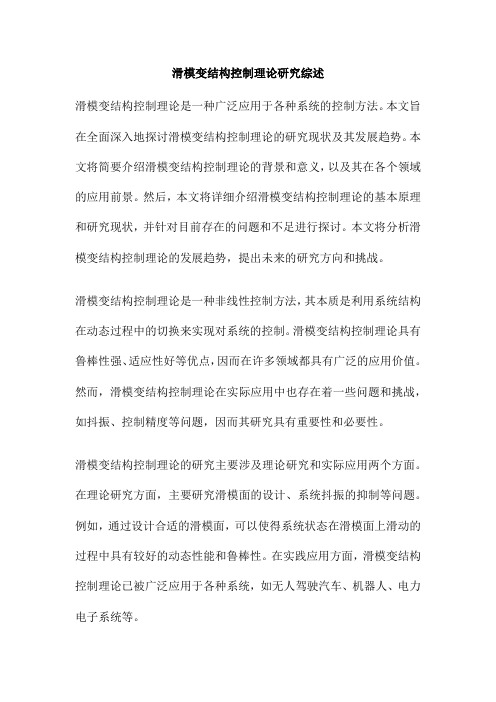
第35卷第9期2013-09(上) [431 1 匐 化 DADSCdp,因为g2=Q~gl,所以s(k一1)的系数 为零。由于建模误差等原因,这里的干扰力F (k) 与实际值是不相等的,本文用干扰复原值FdR(k) 表示实际干扰。根据式(9)可得将干扰从估计值中 复原出来的传递函数为: 一 鱼 !三二 (10)————-——--一 、 , (z) gxRZ 本质上,干扰复原传递函数可将低带宽及对 控制增益具有依赖性的干扰力估计值 )转换为 高带宽和对控制增益无依赖性的干扰力复原值 FdR(k),这在实际进给驱动系统中具有重要的应 用价值,例如,可以根据直线电机的电流预测切 削力并对机床结构模态进行主动振动控制等。 低频模态源于机床中立柱和床身等大部件 的振动,其振动频率一般不超过100Hz,这类 低频模态一般在高速进给或低速加工过程中被 激发 。具有干扰复原能力的DADSC可对低频模 态进行主动补偿,如图3所示。机床结构模态的 传递函数Gin(s)及相关参数可通过测量和辨识得 到,这在工程实际中是相对简单和直接的。传递 函数Gm(s)的离散等效形式为Gm(z),将复原所得 的干扰FdR(z)施加于Gm(z),可计算出机床振动 的预测值xm—comp(z),然后,可将xm—comp(z)与 指令信号相加送入控制器,这种方法类似于前馈 补偿控制。因为进给系统试图跟踪改进后的指令 信号,其可间接减小刀具与工件之间的相对振动 xtcp(s),因此,该方法可有效提高加工过程的稳 定性和被加工零件的表面质量。该控制策略可使 进给驱动系统具有较大的带宽、较强的鲁棒性和 抗干扰性能,并可减小机床在低速加工过程中的 振动。 ) 机床结构模态 控制器 辫L (el I。。—_Iz) 亡= 一厂 (z)卜一{l (2) 图3基于主动阻尼的机床低频结构模态补偿 本文将基于该系统对所设计策略的控制性能和干 扰预测性能进行检验。试验所采用的硬件系统为 dSPACE,基于主滑动工作台对所设计的控制算 法进行了实验,系统相关参数为:m=3lkg,阻 尼系数b=52.5kg/s,最大速度200m/min,采样时 间T=62.5 1.t S。DADSC中的增益分别为入=300(1/ s),K=500(1/s),gl=20000kg/s。CC中的增益分别 为K =600(1/s),K ̄=30000kg/s,T =7.5ms。通过调 节控制增益使得DADSC与CC的控制性能相似, 此时,DADSC ̄IICC的控制带宽分别为145Hz和 130Hz。然而,由图5中DADSC具有较小的谐振 峰值可知,其比CC具有更强的抗干扰性能,这与 理论分析结果一致。当谐振峰值从CC的一135dB (0.18 m/N)减.,J, ̄IJDADSC的一140dB(0.056 u m/N) 时,直线驱动系统的动态刚度由5.6N/u m增加到 了17.9N/u m。 /Fd和FdR/Fd的频率响应如图6(a)和图6(b)所 示,由图可知,随着干扰自适应增益g 的增加, , /Fd的带宽减小,FdR/Fd的带宽基本保持不变,而 且一直比 /Fd的带宽大。干扰力的预测值和测量 值的比较如图6(c)和图6(d)所示,其表明了DADSC 在预测干扰力时的有效性。
图4直线进给驱动系统 3实验验证 一瑟 西门子高速直线进给驱动系统如图4所示, 图 干扰传递函数的B。d。图
【44】 第35卷第9期2013—09(上)
Ig pJ毒l】 器