单片机课程设计 超声波液位检测仪..
基于单片机的超声波水位控制器的设计

基于单片机的超声波水位控制器的设计一、引言在许多工业和民用领域,如水库、水塔、污水处理厂等,准确监测和控制水位是至关重要的。
传统的水位控制方法往往存在精度低、可靠性差、响应速度慢等问题。
随着电子技术和单片机技术的不断发展,基于单片机的超声波水位控制器应运而生,它具有精度高、响应快、易于实现自动化控制等优点,为水位控制提供了一种更加高效、可靠的解决方案。
二、超声波水位测量原理超声波是一种频率高于 20kHz 的机械波,它在空气中传播时遇到障碍物会发生反射。
超声波水位控制器就是利用这一原理来测量水位的。
控制器通过发射超声波脉冲,并测量从发射到接收反射波的时间间隔,根据声音在空气中的传播速度,就可以计算出传感器到水面的距离。
由于传感器的安装位置是固定的,因此可以通过计算得出水位的高度。
三、系统硬件设计(一)单片机选型在本设计中,选用了_____型号的单片机作为核心控制器。
该单片机具有性能稳定、运算速度快、资源丰富等优点,能够满足系统的控制和数据处理需求。
(二)超声波传感器选择了一款高精度的超声波传感器,其测量范围能够满足实际应用的需求,并且具有良好的稳定性和可靠性。
(三)显示模块为了实时显示水位信息,选用了_____显示模块。
它可以清晰地显示水位高度、报警状态等信息,方便操作人员查看。
(四)按键模块设置了按键模块,用于设定水位的上下限阈值,以及进行系统的参数设置和操作控制。
(五)报警模块当水位超过设定的上下限阈值时,报警模块会发出声光报警信号,提醒操作人员及时采取措施。
(六)电源模块为整个系统提供稳定的电源供应,确保系统的正常运行。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机内部资源的初始化、传感器的初始化、显示模块的初始化等。
然后进入主循环,不断地采集水位数据、进行数据处理和判断,并根据判断结果控制显示模块和报警模块。
(二)数据采集与处理程序通过单片机的定时器和中断功能,精确地测量超声波从发射到接收的时间间隔,并将其转换为水位高度。
基于stm32单片机的高精度超声波液位计设计

第 2期 总第 228 期2020 年 3 月浙江水利科技Zhejiang HydrotechnicsNo . 2 Total No . 228March. 2020基于STM32单片机的高精度超声波液位计设计孙 超,吴修广(浙江省水利河口研究院,浙江 杭州 310020)摘 要:阐述影响超声波测量精度的原因及对策,给出一种基于STM32单片机、高精度超声波液位传感器PICO + 100/WK - I、24位AD采样芯片AD1256的液位计系统设计。
经过率定及验证,在120.0 ~ 1 000.0 mm量程范围内可以实现0.1 mm测量精度。
关键词:STM32;高精度超声波传感器;AD1256;液位计中图分类号:TV131.61文献标识码:A文章编号:1008 - 701X(2020)02 - 0039 - 03DOI:10.13641/ki.33 - 1162/tv.2020.02.012High Resolution Ultrasonic Liquid Level Meter Based on STM32SUN Chao,WU Xiu-Guang(Zhejiang Institute of Hydraulics and Estuary,Hangzhou310020,Zhejiang,China)Abstract:This paper introduces the reasons for affecting the accuracy of ultrasonic measurement,describes a design of aliquid level meter system based on the STM32 MCU with high - precision ultrasonic sensor PICO+100/WK/I and 24 - bit ADchip AD1256. An accuracy of 0.1 mm can be achieved with the range of 120.0 -1 000.0 mm after calibration and verification. Key words:STM32;high resolution ultrasonic sensor;AD1256;liquid level meter液位测量有接触式和非接触式2种,如接触式的浮子型及压力型,非接触式的微波雷达法、激光法和超声波法等。
超声波液位仪的设计_毕业设计 精品推荐
学士学位毕业设计(论文)超声波液位仪的设计学生姓名:指导教师:所在学院:专业:目录摘要............................................................... 错误!未定义书签。
ABSTRACT ...........................................................错误!未定义书签。
前言............................................................... 错误!未定义书签。
1 绪论 (1)1.1 课题背景 (1)1.1.1 超声波液位仪的研究背景与内容 (1)1.1.2 超声波液位仪的现状 (1)1.2 论文研究内容 (2)1.2.1 研究内容 (2)1.2.2 论文的章节安排 (3)2 超声波的液位测量原理 (5)2.1 超声液位仪理论基础 (5)2.1.1 超声波介绍 (5)2.1.2 超声波探头的结构和原理 (5)2.1.3 T/R40-16 超声波探头 (7)2.1.4 传感器的指向角Θ (8)2.2 超声波液位仪工作原理 (9)2.2.1 超声波液位仪工作原理 (9)2.2.2 测量盲区 (10)2.3 本章小结 (11)3 硬件总体设计 (12)3.1 超声液位仪总体设计 (12)3.2 单片机电路 (14)3.2.1 复位电路设计 (15)3.2.2 电源电路设计 (16)3.2.3 时钟振荡器 (17)3.3 发射电路 (18)3.4 接收电路 (19)3.5 液晶显示电路 (20)3.6蜂鸣报警电路....................... (21)3.7对电路板进行合理设计 (23)3.8 本章小结 (25)4 系统软件设计 (26)4.1 软件总体设计 (26)4.1.1 软件设计流程图 (26)4.1.2 主程序结构流程图 (27)4.1.3 回波接收流程图 (29)4.1.4 中断程序流程图 (29)4.1.5报警系统子程序 (30)4.2本章小结 (39)5 实验结果分析及改进 (40)5.1实验结果分析 (40)5.2误差分析及改进措施 (47)5.3 本章小结 (48)6 结论与展望 (48)总结 (49)参考文献 (49)致谢 (55)附录一:超声波液位计电路原理图 (55)附录二:超声波液位仪PCB板图 (55)附录三:程序清单 (55)第一章绪论1.1 课题背景1.1.1 超声波液位仪的研究背景与内容超声波液位仪作为一种典型的非接触测量仪器,在很多场合有广泛的应用,诸如工业自动控制,建筑工程测量和水面高度测量等方面。
超声波液位测量系统设计
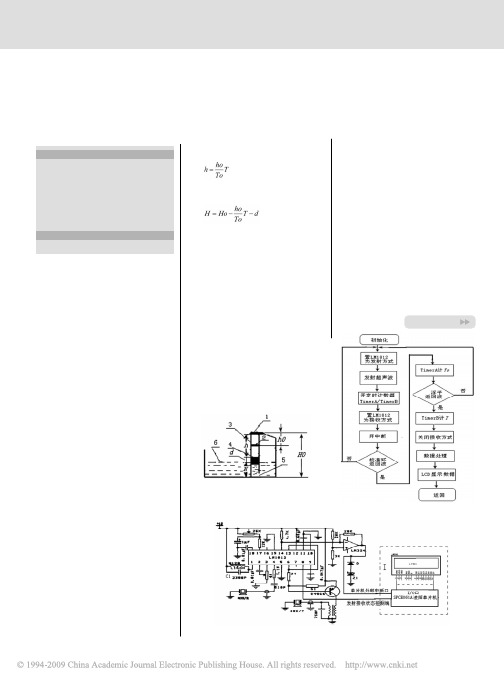
推出:故被测量液体的液位:H=Ho-h-d上式中:H是被测量液体的液位;Ho是超声波传感器到容器底部的距离;h是超声波传感器到浮子顶部的距离,通过测量的时间计算其值;ho是超声波传感器到校准环的距离,可根据最高液面调整校准环的高度;d是浮子顶面到液面的距离。
由此可见,测量时与超声波的速度无关,不存在因温度,湿度,气压影响超声波的速度给系统带来的误差。
该系统要实现其功能和减少系统误差,装置必须满足以下要求:其一,测量管的底部与被测液体连通,便于被测液体进入测量管;其二,浮子的密度必须小于被测液体的密度,且浮子具备抗腐蚀性;其三,校准环和浮子应选有利于超声波反射的材料;其四,测量管采用抗腐蚀性强的不锈钢材料。
超声波液位测量系统设计阳华忠 孙传友 长江大学电信学院 4340231 引言目前,超声波技术发展迅速,不断渗透到各个领域,如在军事、医疗、测绘等方面都有广泛的应用。
液位的测量和控制也是日常生活中一个重要的领域,液位的测量方法有很多。
例如:差压法测量液位,电容法测量液位,温度补偿超声波法测量液位等等。
但采用这些方法会因恶劣的环境和液体密度的变化给测量带来较大的误差,因某些液体具有腐蚀性而腐蚀测量装置。
针对上述问题,本设计提出了基于浮子的参比法,由SPCE061A凌阳单片机,LM1812超声波专用集成芯片相结合的方法,解决上述问题。
本系统可靠性高,适用性强,精度高。
2 参比法液位测量原理参比法其原理是利用超声波换能器发出的超声波脉冲,通过气介质传播,在密度变化较大的界面处形成反射回波传到换能器并将其接收。
若测出超声波从发射到接收的时间,就可以精确地计算出被测液体的液位。
其原理如图1,当超声波发射后,接收超声波的传感器就会依次接收到两束回波信号,一束回波是在校准环处产生的,测量的时间为To。
另一束回波是在浮子处产生的,测量的时间为T。
浮子随被测液体的液位变化而变化,超声波在浮子以上的气介质中传播。
由于在相同的环境中工作,超声波到校准环和到浮子顶面的速度相等。
毕业论文设计-超声波液位检测电路设计

衡水学院毕业论文(设计)超声波液位检测电路设计论文作者:XX指导教师:XX系别::物理与电子信息系专业电子信息工程年级:2013级提交日期:2017年4月18日答辩日期:2017年5月05日毕业论文(设计)学术承诺本人郑重承诺:所呈交的毕业论文(设计)是本人在导师指导下进行的研究工作及取得的研究成果。
除了文中特别加以标注和致谢的地方外,论文(设计)中不存在抄袭情况,论文(设计)中不包含其他人已经发表的研究成果,也不包含他人或其他教学机构取得的研究成果。
作者签名:日期:毕业论文(设计)使用授权的说明本人了解并遵守衡水学院有关保留、使用毕业论文(设计)的规定。
即:学校有权保留或向有关部门送交毕业论文(设计)的原件或复印件,允许论文(设计)被查阅和借阅;学校可以公开论文(设计)的全部或部分内容,可以采用影印、缩印或其他复制手段保存论文(设计)及相关资料。
作者签名:指导教师签名:日期:日期:论文题目:超声波液位检测电路设计摘要:水位测量技术在现代社会应用的场合非常的广泛,不管是工厂还是其他一些设备,都需要对水位进行监测,而现在的设备一般都比较简单,整个系统都比较单调,而且如果现场没有人员在,很可能会发生危险。
因而在翻阅了大量的书籍的前提下,我设计了一种新的水位测量系统。
本文以STC89C52单片机为核心,通过超声波测距模块,来实现对水位的测量,从而得到测量值,然后显示在1602液晶显示屏上面,并且通过DS18B20模块将现场的温度信息发送给单片机,单片机处理后,在液晶显示屏上进行相应的显示。
本文所设计的系统对以往的水位监测系统进行了改进,能够远程得到水位的信息,看水位是否处于危险情况下,整个系统的设计比较安全,可靠性高。
关键词:STC89C52;1602液晶;水位测量;DS18B20模块TITLE:DESIGN OF ULRASONIC LIQUID LEVELDETECTION CIRCUITAbstract: Water level measurement technology in the application of modern society is very wide occasions, whether it is factories or other equipment, need to monitor the water level, and now the equipment is generally relatively simple, the whole system is more monotonous, and if there is no staff at the scene, Is likely to be dangerous. So in the read a lot of books under the premise, I designed a new water level measurement system.In this paper, the STC89C52 microcontroller as the core, through the ultrasonic distance measurement module, to achieve the water level measurement, to get the measured value, and then displayed on the 1602 LCD screen, and through the DS18B20 module will send the temperature information to the microcontroller, single-chip processing , The corresponding display on the LCD screen.The system designed by the books has improved the water level monitoring system in the past, and can get the information of the water level remotely. If the water level is in danger, the design of the whole system is relatively safe and the reliability is high.Key words: STC89C52; 1602 Liquid Crystal; Water Level Measurement; DS18B20 Module目录摘要 ...................................................................................................... 错误!未定义书签。
基于超声波的液位测距系统设计_毕业设计论文
摘要本文是利用超声波测距的原理而设计的一种液位测距系统。
该系统采用STC12C5A08S2单片机为核心控制器,并为超生测距模块提供触发控制信号,在发射超声波的同时,启动单片机的内部定时器开始计时,超声波在空气中传播遇到障碍物后反射回波,超声波接收电路检测到回波信号时停止计时,则根据公式:S=Vt/2 即可计算出液位距离。
文中设计的系统着重解决了超声波测距的时间计算和温度补偿问题。
其中通过温度传感器将温度值采集到单片机中,经过一定的数值修正即可得到当时温度值下的超声波传播速度V。
本文采用了硬件和软件相结合的设计方法,在软件方面,采用了汇编语言进行程序编写。
在数据处理上充分利用汇编语言的查表优势,建立了速度修正值表和数码管显示值表,可以便捷、明了地进行数据处理和显示。
关键词:超声波测距STC12C5A08S2 温度补偿液位测距系统Title Design of liquid level based on ultrasonic distance measurement systemAbstractThis article designs a liquid level measurement system which is based on the principle of ultrasonic distance measurement.The system takes STC12C5A08S2 as the core of the system controller. The SCM provides control signals for ultrasonic distance measurement modules, and starts the monolithic integrated circuit internal timer to work while emitting ultrasonic. Ultrasonic reflection echo after the communication obstacles in the air, and the SCM stops timing when the echo signal is detected by the ultrasonic receiver.According to the formula: S=Vt/2, the liquid level distance is calculated.The system is designed to focus on the time and temperature compensation of ultrasonic distance measurement.The temperature value is collected in the SCM through the temperature sensor, undergoing a certain numerical correction to get the ultrasonic wave propagation velocity under the temperature.This article uses a combination of hardware and software design. In software, we use assembly language to program.Full use of Assembly language reference table advantages in data processing, we established the speed correction table and the digital display values table which can be convenient and clear for data processing and display.Keywords:Ultrasonic distance-measuring;STC12C5A08S2;Temperature compensation;Liquid level measurement system目录1 引言 (1)1.1 测距在工业方面的应用 (1)1.2 现有的测距方法及其优缺点 (1)1.3 超声波测距的原理及优点 (2)1.4 课题研究的意义 (2)2 总体方案论证 (2)2.1 系统方案简化 (3)2.2 系统软件设计说明 (4)3 系统硬件电路设计 (4)3.1 HC—SR04超声波测距模块简介 (4)3.2 单片机的选型(STC12C5A08S2) (6)3.3 显示电路的设计 (9)3.4 温度传感器的选型 (10)4 系统软件设计 (11)4.1 主程序设计 (12)4.2 子程序设计 (13)4.3 数码管显示程序 (17)5 系统调试与分析 (18)结论 (22)致谢 (23)参考文献 (24)附录A 汇编程序清单 (25)图一系统完整电气原理图 (28)1 引言1.1 测距在工业方面的应用在现代工业现场,测距技术的应用可以说是无处不在。
超声波液位计检测系统设计毕业设计说明书
本设计是以 STS89C51 单片机为核心的低成本,高精度,微型化数字显示超 声波测距仪。整个电路采用模块化设计,由单片机控制模块,超声波发射模块, 超声波接受模块和数据显示模块组成,软件部分由主程序,预置子程序,发射子 程序,接受子程序,显示子程序组成。各探头的信号经单片机综合分析处理,是 线超声波液位测距的各种功能。在此基础上设计了系统的总体方案,最后通过硬 件和软件实现了各个功能模块。相关部分附有硬件电路图,程序流程图。
第 5 章 产品调试....................................................................................................................28 5.1 调试的设备.................................................................................................................... 28 5.2 调试步骤........................................................................................................................ 28 5.3 电子元器件的安装要求与焊接工艺............................................................................ 28 5.4 故障分析................................................................................................. 29
基于单片机的超声波液位测量仪
!"#"$ %&’"( )* +,#$&’)*-. #) !"&’/$" #0" 1-2/-(3,"4",
156 7-&*3,)*8 (34567894:8 ;< =>4?87;:@?A ;< BCD6: E:A8@8C84 ;< FD@5GC@>H@:I /4?D:;>;IJ, BCD6: &#"")", .D@:6) 9:’#$&.#: /D4 8D4;7J, 8D4 ?@7?C@8, 6:H 8D4 57;I769 K474 @:87;HC?4H CA@:I *+),- 6A 8D4 ?;95;:4:8 8; H484?8 8D4 C>876A;:@? 6:H CA@:I 8D4 +.L %(.)’ 6A 8D4 96@: ?;:87;> ?;95;:4:8M /D4 6HN6:86I4A ;< O445@:I ?>467 ;< 8D4 94H@C9 KD@?D @A H484?84H, G4@:I >@O4>J 8; H484?8 >;K 84954768C74 94H@C9, :; 9;N6G>4 ?;95;:4:8, >;:I4N@8J 6:H A; ;: ?6: G4 ;G86@:4H KD4: CA@:I 8D4 C>876A;:@? 8; H484?8 8D4 >@PC@HQ>4NQ 4>M /D4 AJA849RA 57@?4 ?6: G4 74HC?4H 6:H 8D4 6G@>@8J 8; ?68?D 8D4 C>876A;:@? ?6: G4 @957;N4H K@8D *+),- 6A 8D4 H484?8@:I ?;95;:4:8 ;< 8D4 C>876A;:@?M /D4 9;74 @:84>>@I4:8 ?6: G4 ;G86@:4H KD4: CA@:I 8D4 +.L 8; ?;:87;> 8D4 49@AA@;: 6:H 74?4@N4 6:H 8; ?6>?C>684 8D4 >@PC@HQ >4N4>M /D4 ?6CA4A GJ 8D4 C>876A;:@? N4>;?@8JRA N67@48J 6:H 8D4 H4>6J ;< 8D4 *+),-RA ;C85C8 8; G7@:I 8D4 946AC7@:I 477;7A K474 6:6>JSH @: H486@> 6:H 8D4 948D;H 8; 74HC?4 @8 @A GJ D@4ID84:@:I 8D4 574?@A@;: KD4: 6HTCA8@:I 8D4 C>876A;:@? N4>;?@8J 6:H 8D4 H4>6J K6A 6>A; 5C8 <;7Q K67HM /D@A 94847 D6A 6 D@ID>J 6??C76?J, ?74H@G@>@8J 6:H GJ 8D4 4U547@94:8, 6:H @8 ?6: G4 CA4H K@H4>J @: 96:J 6A54?8AM ;"< =)$(’: +.L; L>876A;:@?; *+),-; *@PC@HQ>4N4>
基于单片机的外测式液位仪控制程序设计
基于单片机的外测式液位仪控制程序设计摘要本设计的主要研究方法是利用超声波回波法进行测量,由超声波传感器的发射探头发射超声波,当超声波遇到障碍物时会被反射,利用单片机记录超声波的发射时间和接收到回波的时间,根据当前环境下超声波的速度,即可计算出超声波传播的距离,即可确定液面高度。
文中介绍了超声波测液位的基本原理,设计出了由AT89C51单片机为主控元件的超声波液位测量系统。
设计了主要由超声波发射电路,超声波接收电路,单片机控制电路和显示电路构成的系统框图。
同时给出软件系统程序设计方法,系统实现了标准液位的检测及显示功能。
在硬件部分,超声波发射电路将AT89C51单片机控制的每隔20ms的方波脉冲信号放大到-300V,以满足超声波发射探头的发射需要。
超声波接收电路对接收的回波进行放大整形,送回单片机。
系统以AT89C51单片机为设计核心,测量得到超声波的传播时间,计算出传播的距离,从而得到所要测量的液位距离,并通过数码管显示出来。
在程序设计部分,根据系统框图设计出主程序流程图,采用的是模块化结构,主要分三部分:主程序,中断服务子程序和显示子程序。
再分别根据各个子程序的流程图编写相应的程序,使得程序部分适合硬件部分,使系统功能得以实现。
关键词:液位测量,超声波,非接触测量,单片机控制Control Program Design of Outside T est of LiquidLevel Based on MCUABSTRACTThe design of the main research method is the use of ultrasonic echo method to measure the emission from the ultrasonic sensor ultrasonic probe launch, when the ultrasonic wave is reflected when an obstacle, the use of ultrasonic transmitter microcontroller records the time and the received echo time, According to the speed of ultrasound under the current environment, you can calculate the distance ultrasonic propagation, fluid levels can be determined. This paper introduces the basic principles of ultrasonic liquid level measurement, designed by the AT89C51 microcontroller as the main control component of the ultrasonic level measurement system. Designed mainly by the ultrasonic transmitter circuit, the ultrasonic receiver circuit, single chip control circuit and display circuit to form a system block diagram. Procedures are given software system design, system implementation of the standard liquid level detection and display. In hardware, ultrasonic transmitter circuit AT89C51 Microcontroller square wave pulse every 20ms signal amplification to-300V, in order to meet the launch needs of ultrasonic probe launched. Ultrasonic receiver circuit to amplify the received echo shaping, back to SCM.AT89C51 microcontroller system for the design of the core, the propagation time of ultrasonic wave measured to calculate the propagation distance, resulting in level to be measured by the distance, and thro ugh the digital display. In the programming part of the design according to the system block diagram of the main program flow chart, using the modular structure, the main three parts: the main program, interrupt service routines, and display routines. And then were prepared according to each corresponding subroutine program flow chart, making part of the program for hardware, system functions can be achieved.KEY WORDS:level measurement, ultrasonic, non-contact measurement, MCU controlII目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 液位测量系统的现状 (1)1.2 液位计的分类 (1)1.2.1 接触型液位仪表 (2)1.2.2 非接触型液位仪表 (3)1.3 液位传感器的发展方向 (4)1.4 超声波液位计的优缺点与可行性 (4)2 超声波传感器 (6)2.1 超声波的性质 (6)2.1.1 超声波基本性质 (6)2.1.2 超声波的衰减 (6)2.1.3 超声波的特性 (6)2.1.4 超声波的折射率 (7)2.2 超声波外测液位检测方法选择 (8)2.3 超声波探头的选取 (9)2.3.1 压电效应 (9)2.3.2 探头材料的选取 (10)2.3.3 超声波传播形式 (11)2.4 超声波换能器的结构和原理 (11)2.5 超声波换能器最佳频率计算 (12)3 液位仪的整体设计 (13)3.1 超声波液位仪 (13)3.1.1 超声波测距的理论分析 (13)3.1.2 超声波液位仪工作原理 (14)3.3 系统总体设计思想 (16)3.3.1 硬件框图设计 (16)3.3.2 主流程图设计 (16)4 程序设计 (19)4.1 确定开发语言 (19)4.2 主控制器的确定 (20)IV4.2.1 AT89C51功能说明 (20)4.2.2 系统中AT89C51的功能说明 (23)4.3 主程序设计 (23)4.4 中断程序设计 (24)4.5 温度采集程序设计 (26)4.6 串行口通信设计 (28)4.7 显示程序 (29)5 结论 (33)5.1 程序设计调试结果 (33)5.2 设计总结 (33)致谢 (35)参考文献 (36)附录 (38)IV基于单片机的外测式液位仪控制程序设计 11 绪论1.1 液位测量系统的现状目前,液位测量技术已经广泛的运用在工业部门和日常检测部门中。
基于单片机的超声波液位测量系统
介绍了超声波测距的基本原理和系统框图,给出了超声波发射和接收电路,通过盲区的消除以及环境温度的采样,提高了测距的精确度。
利用超声波传输中距离与时间的关系,采用8051单片机进行控制及数据处理,设计出了能精确测量两点间距离的超声波液位检测系统。
系统主要由超声波发射器电路、超声波接收器电路、单片机控制电路、环境温度检测电路及显示电路构成。
利用所设计出的超声波液位检测系统,对液面进行了测试,采集当时的环境温度获得精确的速度,计算出液面距离。
此系统具有易控制、工作可靠、测量精度高的优点,可实时检测液位。
关键词:超声波,液位测量,温度传感器Introduces the basic principles of ultrasonic rangefinder and system diagrams, gives ultrasonic transmitter and receiver circuit, Through the elimination of dead zone and the sample of ambient temperature, which improves the accuracy of the measuring distance. Use the relation between Ultrasonic transmission distance and time, take the 8051 microcontroller to control and data processing, devised to accurately measure the distance between two points of ultrasonic level detection system. The system is primarily consist of the ultrasonic transmitter, ultrasonic receiver circuit, microcontroller circuit, the ambient temperature detection circuit and show circuit. Use the ultrasonic level detection system, on the surface of a test, collecting at ambient temperature and getting an accurate speed, calculate the surface distance. This system is easy to control, reliable, high precision, real-time detection level.Key words:Ultrasonic ,level measurement, temperature sensors目录前言 (1)1 总体概述 (2)2 超声波和超声波传感器 (3)2.1 超声波 (3)2.1.1 定义 (3)2.1.2 超声波的主要参数 (3)2.1.3 超声波的特性 (3)2.1.4 超声波的特点 (3)2.1.5 超声波传感器的主要应用 (3)2.2 超声波传感器测距原理 (4)2.2.1 超声波传感器 (4)2.2.2 超声波传感器的性能指标 (4)2.2.3 超声波传感器的结构 (5)2.2.4 超声波测距原理 (5)3 MCS-51系列单片机 (7)3.1 8051单片机的总体结构 (7)3.1.1 8051单片机的总体框图和功能 (7)3.1.2 8051的引脚功能 (8)3.2 8051单片机的定时器/计数器 (10)3.2.1 8051的定时器/计数器功能 (10)3.2.2 定时器控制寄存器 (10)3.2.3 工作方式控制寄存器 (11)3.2.4 中断允许控制寄存器(IE) (11)3.2.5 定时器/计数器的工作方式 (11)3.3 8051单片机的中断 (12)3.3.1 中断的定义 (12)3.3.2 8051单片机的中断源 (12)3.3.3 中断控制的专用寄存器 (13)4 硬件设计 (16)4.1 8051 单片机的最小系统组成 (16)4.2 超声波发射电路设计 (17)4.2.1 超声波频率及探头的选择 (17)4.2.2 超声波发射电路 (17)4.3 超声波接收电路设计 (18)4.3.1 超声波接收器 (18)4.3.2 超声波接收电路图 (19)4.4 温度检测电路 (20)4.4.1 温度检测方案的分析 (20)4.4.2数字温度传感器DS18B20简介 (20)4.4.3 DS18B20的结构及电路 (20)4.5 显示方案的论证与选择 (21)4.5.1 LED显示电路图 (21)4.6 稳压电源 (22)4.6.1 稳压电源构成 (22)4.6.2 +5V电源电路 (23)4.6.3 +12V电源电路 (23)5 软件设计 (25)5.1 主程序设计 (26)5.1.1 主程序流程图 (26)5.1.2 主程序 (27)5.2 中断服务子程序 (27)5.2.1 中断初始化 (27)5.2.2 中断子程序流程图 (29)5.3 温度检测子程序 (29)5.4 距离的计算 (30)结论 (31)致谢 (32)参考文献 (33)附录 A (34)附录 B (35)前言随着科学的发展液位的检测方法也在变化,精度也有了更佳的提高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《单片机原理及应用》 课程设计报告书
课题名称 超声波液位检测仪
姓 名 学 号 专 业 指导教师
机电与控制工程学院 年 月 日 任 务 书 一、课题名称 超声波液位检测仪的设计与制作 二、设计内容及要求 1、以单片机为核心,设计一个液位检测系统 2、测量数据由液晶显示 3、系统要有一定的可靠性和一定的测量精度
目 录 1、绪论 …………………………………………………………………1 2、方案论证 ……………………………………………………………2 3、方案说明 ……………………………………………………………4 4、硬件方案设计 ………………………………………………………8 5、软件方案设计 ………………………………………………………12 6、调试 …………………………………………………………………22 7、技术小结 ……………………………………………………………23 8、参考文献 ……………………………………………………………24
1、 绪论 随着各行业的快速发展,液位测量已应用到越来越多的领域,不仅用于各种容器、管道内液体液位的测量,还用于水渠、水库、江河、湖海水位的测量。这些领域使用传统的液位测量手段已经无法满足对其精确性的要求,所以超声波液位测量这种新的测量方向已经成为一种新的手段被广泛的应用。 在目前市场上,按测量液位的感应元件与被测液体是否接触,液位仪表可以分为接触型和非接触型两大类。接触型液位测量主要有:人工检 尺法、浮子测量装置、伺服式液位计、电容式液位计以及磁致伸缩液位计等。它们的共同点是测量的感应元件与被测液体接触,即都存在着与被测液体相接触的测量部件且多数带有可动部件。因此存在一定的磨损且容易被液体沾污或粘住,尤其是杆式结构装置,还需有较大的安装空间,不方便安装和检修。 非接触型液位测量主要有微波雷达液位计、射线液位计以及激光液位计等。顾名思义,这类测量仪表的共同特点是测量的感应元件与被测液体不接触。因此测量部件不受被测介质影响,也不影响被测介质,因而其适用范围较为广泛,可用于接触型测量仪表不能满足的特殊场合,如粘度高、腐蚀性强、污染性强、易结晶的介质。 超声波液位测量计就属于非接触型液位测量的一种,所以它也有不受被测介质影响,不影响被测介质,能适应粘度高、腐蚀性强、污染性强、易结晶、高温、高压、低温、低压、有辐射性、毒性、易挥发易爆等特殊介质的测量的特点,能适应的范围比其它的测量手段更广泛。 本次课程设计,将对超声波液位检测系统进行介绍。
2、方案论证 液位计量仪表早期大多采用机械原理,但近年来随着电子技术的应用,逐步向机电一体化发展,并且发展了许多新的测量原理。在传统原理中也渗透了电子技术及微机技术,结构有了很大的改善、功能有了很大的提高。尤其是近二十年来,随着微处理器的引入,测量仪表更是发生了革命性的变化。液位计的量程从几米到几十米,测量精度亦大大提高。根据液位测量所涉及的液体存储容器、被测介质以及工艺过程的不同,液位计类型的选用也不同。在进行液位测量前,必须充分了解液位测量的工艺特点,以此作为液位计设计过程中的参考因素。 因此,可根据系统的工作原理的不同,设计出三种不同的液位检测方法。 方法一: 根据连通器原理,可以直接用与被测容器连通的玻璃管或玻璃板来显示容器中的液位高度,他是最原始但仍应用较多的一种液位测量仪表,另外,利用侵入式刻度钢皮尺直接测量液面高度的人工检尺法也是应用较广泛的液位计量方法,尤其是在大型油罐储油量中,也可把它用作现 场检验其他测量仪表的参考手段。其精度一般为2mm的人为误差。 方法二: 根据悬浮物测量液位。利用浮子的比重比所测液体的比重稍小的特点,使浮子漂在液面上并随液面的升高或下降来反应液位,他也是一种应用最早并且应用范围很广的液位测量仪表;将浮子用一条多孔钢带连接至一个恒转矩装置或平衡锤上,由浮子的重量带动多于L钢带通过齿轮装置推动机械计算器作现场显示,还可连接电动变送器作现场显示,还可连接电动变送器,获得远距离显示。 方法三: 利用超声波对容器液位进行检测。超声波液位仪是非接触测量中发展最快的一种。该技术基于超声波在空气中的传播速度及遇到被测物体表面产生反射的原理。可实现非接触测量、测量范围宽、并且测量不受介质密度、介电常数、导电性等的影响。 对比以上三种方法,方法一,虽然具有测量简单、直观、成本低的优点,但测量量程有限,并且不适于恶劣环境的测量,特别是在对粘稠性较高的液体进行液位检测时,就很容易出现问题。粘性液体黏在管壁内侧,容易引起读数错误;方法二,由于滑轮机械装置的摩擦力和冒带重量,测量误差较大,且当使用时间较长时,由于滑轮机械的磨损,致使测量误差越来越大;方法三,可实现非接触测量,测量范围宽,且不受测量液体的影响,也不影响被测液体,是一种较为安全、测量精度较高的测量方法,因此它的实用性也是最广的。 综上所叙,在此我们选择第三种方案,即利用超声波对容器液位进行检测。
3、方案说明 3.1超声波的介绍 简单来说,超声波就是超过人耳能听到的物体振动的声音的频率范围的声波就叫超声波。一般来说是指声音超过了20000Hz以上的声波称之为超声波。与光波不同,声波是一种弹性机械波,即机械振动在弹性媒质中的传播。 超声波有以下几个特点:1.频率高波长短定向好;2.振幅小加速度大能量集中功率高强度大;3.在不同介质界面上大部分能量反射。因而,超声波特别适合于距离测量。 3.1.1超声波基本性质 和其他声波一样,超声波可以在气体、液体及固体中传播,并有各 自的传播速度。例如,在常温下空气中的声速约为334m/s,在水中的声速约为1440m/s,而在钢铁中约为5000m/s。其在空气中的传播速度主要与空气的压力和温度有关正常条件下由于大气压力变化很小因此其传播速度主要考虑温度的影响在空气中传播速度为 C=331.3+0.606T(m/s) 其中C为超声波声速,T为传播介质的温度。因此只要温度已知,就能算出超声波的速度。为了简单起见,我们直接取其速度为340m/s。 在空气中, 声波在介质中传播时会被吸收而衰减,气体吸收最强而衰减最大,液体其次,固体吸收最小而衰减最小。因此,对于一给定强度的声波,在气体中传播的距离会明显比在液体和固体中传播的距离短。另外,声波在介质中传播时衰减的程度还与声波的频率有关,频率越高,声波的衰减也越大,因此,超声波比其他声波在传播时的衰减更明显。 因此考虑到实际工程的需要,在设计超声波液位计时,选用频率等于40kHz的超声波,波长为0.85cm。 3.2超声波液位检测原理 超声波液位测量法是70年代发展起来的一种新型液位测量方法,该方法利用了超声波在相同的介质中传播速度不变的原理。超声波是机械波的一种,其最明显的一个特征是方向性好,能够定向传播,当碰到障碍物时能够反射回来。超声波测量方法有很多,如脉冲回波法、共振法、频差法以及声衰减法等,其中应用最广泛的是超声波脉冲回波法。 超声波的测距原理是通过发射声波传感器由脉冲信号激励发出超声波,通过传声媒介传到被测液面,形成反射波,反射波再通过传声介质返回到接收传感器,传感器把声信号转换成电信号,由仪表计算出超声波从发射到接收所传播的时间,再根据超声波在介质中传播的速度计算出来回的直线路径的长度,从而得到所测距离的长度。如图2-1超声波夜位检测仪示意图所示。 图3-2 超声波夜位检测仪示意图 该系统中是通过超声波脉冲传播的时间来确定液位,所以必须己知超声波在传声媒质中声速。然而,对于气体介质式和液体介质式超声波液位计,声速会随媒质的组成、温度、压强的变化而变化。因此,只有当测试条件比较理想,媒质的成分、温度、压强等没有很大变化,才可把传声媒质的声速近似看成不变,直接由测量的声波传播时间来确定液位,否则就应该对传声媒质的声速进行校正。 在这个系统中,运用的是超声波往返时间检测法进行距离的测量的。即,检测从超声波发射器发出超声波的时候算起,通过介质的传播在反射回来的到接收器的时间,叫往返时间。用往返时间与介质中超声波的速度相乘,就可以得到超声波运动的距离,然而实际的距离为所得到距离的一半,如果测量高度为h、超声波在介质里的传播速度为v,传播时间为t,可以得到: 12hvt
这个公式使用于自发自收单感应器方式,探头采用垂直的方式发射超声波,然后再让超声波原路返回到探头。 如果采用一发一收双感应器方式,那么探头就不在采用垂直于介质面发射的方式,因此用上面的公式计算的出来就不在是真实高度,而是超声波经过的路程。这就需要加入角,角为竖直方向与超声波方向的夹角。如图3-3角示意图,
图3-3 角示意图 因此,系统要把测得超声波经过的距离换算成真实的高度。如果超声波经过的距离为L,要测量的真实高度为h,那么超声波经过的距离与真实高度之间有这样的关系: cos()hL 这时h为要测量的真实高度。在公式中,为超声波的入射角。如果实际情况无法测得角时,还可以通过测得两个探头之间的距离m来得到需要测量的高度,
即 2242Lmh 来计算。 3.3测量盲区 由于发射声脉冲自身有一定的宽度,加上放大器有阻塞问题,在靠近发射脉冲一段时间范围内,所要求发现的缺陷往往不能被发现,这段距离,称为盲区。用脉冲回波测量距离时,液面与超声波探头间的距离既不能太远也不能太近,存在着近限和远限。距离过远时,接收到的信号太弱,以致无法从噪声信号中分辨出来,这是远限所以存在的原因。在距离过近时,接收信号将落进盲区中而无法分辨,这是近限所以存在的原因。 超声波液位仪在使用一个探头情况下,同时发射和接收超声波,由于在探头上施加的发射电压强达几十伏甚至上百伏以上,虽然发射信号只维持一个极短的时间,但停止施加发射信号后,探头上还存在一定的余振,因此在一段较长时间内,加载接收放大器输入端的发射信号幅值仍是相当强的,可以达到限幅电路,引起探头振动,不能进行正确的测量,在这种情况下,选用两个探头分别用于发送和接收。双探头方式,不仅可以增加探测距离,还可以减小盲区。由于发射探头上并不直接施加发射电压,所以,从理论上说,可以没有盲区。但是,由于接收电路多少会受到发射电路的感应,并且发射探头所发出的超声波可能有部分直接绕道接收探头,因此实际上仍存在一定的盲区,不过他要比单探头方式的盲区小很多。所以,在本设计中,选取了双探头的工作方式,减小盲区,同时提高检测的距离。