linux 读取串口数据方法
实验6Linux文件IO操作-ADC-串口
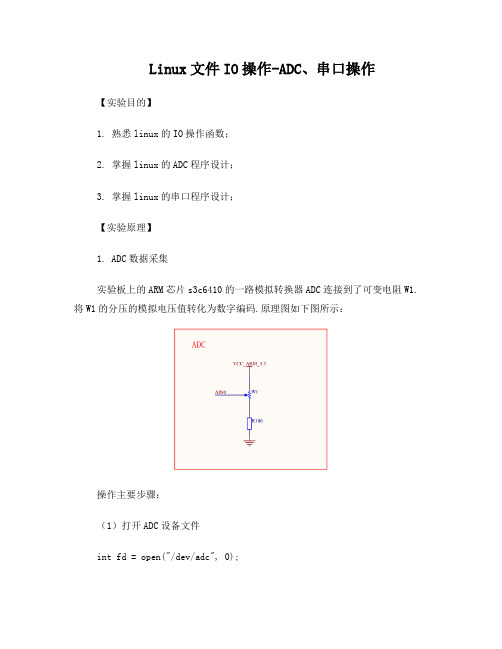
Linux文件IO操作-ADC、串口操作【实验目的】1. 熟悉linux的IO操作函数;2. 掌握linux的ADC程序设计;3. 掌握linux的串口程序设计;【实验原理】1. ADC数据采集实验板上的ARM芯片s3c6410的一路模拟转换器ADC连接到了可变电阻W1.将W1的分压的模拟电压值转化为数字编码.原理图如下图所示:操作主要步骤:(1)打开ADC设备文件int fd = open("/dev/adc", 0);(2)读取ADC转化结果char buffer[30];int len = read(fd, buffer, sizeof buffer -1); //字符串来描述转化结果2. 串口通信【实验内容】1 ADC数据采集功能:实现模拟电压的实时采集,采集周期为500ms,并在ubuntu终端打印ADC转化结果。
编译命令:arm-linux-gcc adc.c –o adc命令执行:./adc源代码adc.c:#include <stdio.h>#include <unistd.h>#include <stdlib.h>#include <sys/types.h> #include <sys/stat.h> #include <sys/ioctl.h> #include <fcntl.h>#include <linux/fs.h> #include <errno.h>#include <string.h>2.串口通信实验功能:实现上位机(PC,ubuntu)串口2与实验板(ARM,嵌入式linux)的串口COM2的数据通信。
该程序包括写串口程序和读串口程序。
ARM实验板上运行读串口程序,Ubuntu上运行写串口程序。
重要说明:在uart_api.h有两个比较重要的宏定义:#define GNR_COM 0 //普通串口#define USB_COM 1 //USB串口#define COM_TYPE GNR_COM //程序中选择串口类型为:普通串口#define HOST_COM_PORT 2 //主机(PC,ubuntu)串口号,编号从1开始#define TARGET_COM_PORT 2 //目标机(ARM)串口号,编号从1开始(1)编译读串口程序,该读串口程序主要有四个文件构成:com_reader.c, uart_api.c,uart_api.h,Makefile在ubuntu上编译读串口程序,进入到源代码存放目录,输入命令:make(2)编译写串口程序该写串口程序主要有四个文件构成:com_writer.c, uart_api.c, uart_api.c,Makefile在ubuntu上编译写串口程序,进入到源代码存放目录,输入命令:make(3)运行程序在ARM实验板运行:./com_readerUbuntu上运行写串口程序:./com_writer在ubuntu上输入相应的字符串,看ARM实验板能否正确收到数据。
linux_虚拟串口实现方法_概述及解释说明
linux 虚拟串口实现方法概述及解释说明1. 引言1.1 概述本文将介绍Linux下实现虚拟串口的方法,并对每种方法进行解释说明。
虚拟串口指的是一种软件仿真的串口设备,可以模拟物理串口的功能,实现数据的收发和传输。
在Linux系统中,使用虚拟串口可以满足一些特定场景下的需求,如开发、测试和调试等。
1.2 文章结构本文按照以下结构进行组织:- 第一部分为引言,对文章进行概述,并介绍文章的结构和目标;- 第二部分将介绍虚拟串口的背景知识,包括串口通信原理、虚拟串口定义与作用以及Linux中虚拟串口的应用场景;- 第三部分将详细介绍Linux下实现虚拟串口的三种方法:内核模块方式、用户空间模拟方式和设备树(DT)方式;- 第四部分将对每种实现方法进行解释说明,包括其原理、特点和适用情况;- 第五部分为总结与展望,对文章内容进行总结并展望未来发展方向。
1.3 目的本文旨在提供一个全面且清晰的介绍Linux下实现虚拟串口方法的资料,帮助读者理解虚拟串口的概念和原理,并根据实际需求选择合适的实现方法。
通过阅读本文,读者将了解到不同实现方法的优缺点,以及它们在不同场景下的应用情况。
同时,本文也对未来虚拟串口技术的发展进行展望。
2. 虚拟串口的背景:2.1 串口通信的基本原理:串口是一种用于在计算机和外部设备之间进行数据传输的通信接口。
它通过一个物理连接,使用一组控制信号和数据信号来实现双向通信。
串口通信具有简单、可靠、广泛应用等特点,因此在许多领域都得到了广泛应用,如电脑与打印机、调制解调器、路由器等设备之间的连接。
2.2 虚拟串口的定义与作用:虚拟串口是对物理串口进行仿真或模拟的一种技术。
它通过软件方式模拟了一个不存在的串行接口,使得应用程序可以通过虚拟串口与外部设备进行通信。
虚拟串口具有操作灵活、易于扩展等特点,可以提供与物理串口相似或更强大的功能。
2.3 虚拟串口在Linux中的应用场景:在Linux系统中,虚拟串口广泛应用于各种嵌入式系统开发和调试场景。
linux 串口初始化程序实例

linux 串口初始化程序实例Linux 串口初始化程序实例在Linux系统中,串口是一种常见的通信接口,用于连接计算机与外部设备,实现数据的传输和通信。
本文将介绍一个基于Linux系统的串口初始化程序实例,帮助读者了解如何在Linux系统中进行串口的初始化配置。
我们需要打开终端并登录到Linux系统。
然后,通过以下命令查看系统中可用的串口设备:```ls /dev/ttyS*```该命令将列出系统中所有的串口设备,例如/dev/ttyS0、/dev/ttyS1等。
根据实际情况,选择需要初始化的串口设备。
接下来,我们需要使用stty命令来配置串口的参数,如波特率、数据位、校验位、停止位等。
例如,假设我们将串口设备设置为波特率9600,数据位8位,无校验位,停止位为1位,可以使用以下命令进行配置:```stty -F /dev/ttyS0 9600 cs8 -parenb -cstopb其中,-F参数指定要配置的串口设备,9600为波特率,cs8为数据位8位,-parenb为无校验位,-cstopb为停止位1位。
配置完成后,我们可以通过以下命令检查串口的参数配置是否正确:```stty -F /dev/ttyS0 -a```该命令将显示串口的当前参数配置,包括波特率、数据位、校验位、停止位等。
接下来,我们可以使用串口设备进行数据的收发。
例如,可以使用cat命令从串口设备读取数据:```cat /dev/ttyS0```该命令将会连续地从串口设备读取数据并输出到终端。
如果需要通过串口发送数据,可以使用echo命令:```echo "Hello, Serial Port!" > /dev/ttyS0该命令将向串口设备发送字符串"Hello, Serial Port!"。
通过以上步骤,我们就完成了Linux系统中串口的初始化配置。
读者可以根据实际需求,对串口的参数进行相应的配置,并使用串口进行数据的收发。
linux 开发板之间数据传输方式

linux 开发板之间数据传输方式
Linux开发板之间的数据传输方式有多种,以下是一些常见的方式:1.网络传输:通过网线或Wi-Fi连接,使用TCP/IP协议栈进行数据传
输。
这种方式适合大量数据的快速传输,但需要稳定的网络环境。
2.串口传输:通过串口连接,使用串口通信协议(如RS-232、RS-485
等)进行数据传输。
这种方式适合短距离、低速的数据传输,常用于设备之间的调试和通信。
B传输:通过USB接口连接,使用USB协议进行数据传输。
这种
方式速度较快,适用于大量数据的传输,但需要开发板支持USB接口。
4.SD卡/eMMC传输:将数据存储到SD卡或eMMC等存储介质中,
然后通过插槽或接口连接到另一块开发板进行数据传输。
这种方式适合大量数据的存储和传输,但需要开发板支持相应的存储接口。
5.I2C/SPI传输:通过I2C或SPI等总线协议进行数据传输。
这种方式
适用于短距离、低速的数据传输,常用于设备之间的通信和控制。
具体选择哪种传输方式,需要根据应用场景、传输距离、传输速率、设备接口等因素综合考虑。
Linux下串口和Socket通讯及应用

XXXX学校实习报告书专业计算机科学与技术系别信息工程系报告题目 Linux下串口和Socket通讯及应用报告人班级指导教师带队教师实习时间2011.7.4-2011.7.18 实习单位教务处监制目录1、实习题目 (3)2、实习目的 (3)3、实习内容 (4)4、实习步骤 (5)4.1系统需求分析 (5)4.1.1 问题定义 (5)4.1.2 可行性研究 (5)4.1.3 需求分析 (5)4.1.4 项目开发计划 (6)4.2 系统设计 (6)4.2.1 系统架构 (6)4.2.2 结构设计 (7)4.2.2.1 上层结构设计 (7)4.2.2.2 中层结构设计 (9)4.2.2.3 物理层结构设计 (9)4.2.3功能模块设计 (10)4.3 系统实现 (12)4.3.1 系统硬件环境 (12)4.3.2 系统软件环境 (12)4.3.3 开发工具 (12)4.3.4 系统功能模块设计与实现 (13)4.3.4.1 界面 (13)4.3.4.2 其他功能 (14)4.4 关键技术 (14)4.5系统测试 (15)4.6系统部署 (17)5、实习参考资料 (17)1、实习题目Linux下串口和Socket通信及其应用串口通信(Serial Communication),串口按位(bit)发送和接收字节。
串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。
串口通信是指外设和计算机间,通过数据信号线、地线、控制线等,按位进行传输数据的一种通讯方式。
套接口(Socket)通信为目前Linux上最为广泛使用的一种的进程间通信机制,与其他的Linux通信机制不同之处在于除了它可用于单机内的进程间通信以外,还可用于不同机器之间的进程间通信。
简单应用设计为温度仪协议转换软件设计和模拟打印机。
对于温度仪协议转换软件一共有三个设备,Server端为PC机,Client端为Linux机(或嵌入式系统机),末端为串口的温度仪。
linux串口收发的一些规则

linux串口收发的一些规则在Linux系统中进行串口收发时,需要遵循一些规则和约定,以确保数据的准确传输和系统的稳定性。
以下是一些关键的规则:串口设备文件:在Linux系统中,串口设备通常被表示为设备文件,位于/dev目录下。
例如,第一个串口设备可能被命名为/dev/ttyS0,第二个为/dev/ttyS1,以此类推。
在编写串口收发程序时,需要正确指定要使用的串口设备文件。
波特率设置:波特率是指数据传输的速率,即每秒传输的位数。
在进行串口通信之前,双方需要约定好使用的波特率,并在程序中正确配置。
常见的波特率有9600、19200、38400、57600等。
数据位和停止位:数据位是指每个字节中实际用于传输数据的位数,通常为5、6、7或8位。
停止位是在每个字节传输完毕后添加的一位,用于表示该字节的结束。
常见的配置是1位停止位,但也可以设置为1.5位或2位停止位。
在程序中需要正确配置这些数据位和停止位的参数。
校验位:校验位用于检测数据传输过程中的错误。
常见的校验方式有奇校验、偶校验和无校验。
在程序中需要选择适当的校验方式,并正确配置校验位的参数。
打开和关闭串口:在使用串口之前,需要通过open()函数打开相应的串口设备文件。
在程序结束时,应使用close()函数关闭串口设备文件。
在打开和关闭串口时,需要注意权限问题,确保程序具有足够的权限来访问串口设备。
读取和写入数据:使用read()函数可以从串口读取数据,而使用write()函数可以向串口写入数据。
在读取和写入数据时,需要注意缓冲区的大小和数据格式的问题。
错误处理和超时设置:在串口通信中,可能会出现传输错误或超时的情况。
为了处理这些情况,可以在程序中设置合适的错误处理机制和超时时间。
例如,可以使用select()函数来检测串口的可读性和可写性,以避免程序陷入无限等待的状态。
遵循异步串行通信规则:Linux串口通信通常采用异步串行通信方式(UART)。
linux c语言串口非标准波特率
linux c语言串口非标准波特率在Linux系统中,使用C语言进行串口通信是一种常见的操作。
通常情况下,串口的波特率可以设置为标准的数值,例如9600、115200等。
但是有时候我们也会遇到一些特殊的情况,需要使用非标准的波特率。
本文将介绍如何在Linux系统中使用C语言进行串口通信,并设置非标准的波特率。
首先,我们需要包含一些头文件,以便在程序中使用串口相关的函数。
我们可以使用以下代码来包含这些头文件:```#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <termios.h>#include <unistd.h>```接下来,我们需要打开串口设备。
使用open()函数可以打开串口设备。
```cint fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);if (fd < 0) {perror("Error opening serial port");return -1;}```在上述代码中,我们使用了"/dev/ttyS0"作为串口设备的文件路径。
根据实际情况,你可能需要使用其他的路径,比如"/dev/ttyUSB0"等。
接下来,我们需要配置串口的波特率。
我们可以使用termios结构体,并使用tcgetattr()函数和tcsetattr()函数来设置波特率。
```cstruct termios options;tcgetattr(fd, &options);cfsetispeed(&options, B57600);cfsetospeed(&options, B57600);tcsetattr(fd, TCSANOW, &options);```在上述代码中,我们将波特率设置为57600。
linux下485通讯c语言代码
linux下485通讯c语言代码Linux下的485通讯C语言代码在嵌入式系统和工控领域中,485通讯是一种常见的串行通讯方式。
Linux作为一种常用的操作系统,也提供了相应的接口和工具来支持485通讯。
本文将介绍在Linux下使用C语言实现485通讯的代码。
在开始编写485通讯的C语言代码之前,我们需要先了解一些基本的概念和原理。
485通讯是一种半双工的串行通讯方式,它使用两根信号线进行数据的传输,一根用于发送数据(TX),一根用于接收数据(RX)。
通常情况下,485通讯使用的波特率较低,例如9600bps或者19200bps。
在Linux下,我们可以通过打开串口设备文件来实现485通讯。
串口设备文件的命名规则为/dev/ttySx,其中x表示串口的编号。
例如,/dev/ttyS0表示第一个串口设备,/dev/ttyS1表示第二个串口设备。
我们可以使用open函数来打开串口设备文件,并使用read 和write函数来进行数据的读写操作。
下面是一个简单的示例代码,演示了如何在Linux下使用C语言实现485通讯:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>int main(){int fd;char data[10];// 打开串口设备文件fd = open("/dev/ttyS0", O_RDWR);if (fd == -1) {printf("无法打开串口设备文件\n");return -1;}// 配置串口参数struct termios options;tcgetattr(fd, &options);cfsetispeed(&options, B9600); // 设置波特率为9600bps cfsetospeed(&options, B9600);options.c_cflag |= CLOCAL | CREAD;options.c_cflag &= ~CSIZE;options.c_cflag |= CS8;options.c_cflag &= ~PARENB;options.c_cflag &= ~CSTOPB;tcsetattr(fd, TCSANOW, &options);// 发送数据strcpy(data, "Hello");write(fd, data, strlen(data));// 接收数据read(fd, data, sizeof(data));printf("接收到的数据:%s\n", data);// 关闭串口设备文件close(fd);return 0;}```上述代码首先通过open函数打开了/dev/ttyS0这个串口设备文件,如果打开失败,则会提示无法打开串口设备文件并退出。
linux 串口 poll() 工作原理
linux 串口 poll() 工作原理Linux的串口poll()函数是一种用于监测串口设备状态的机制。
它可以用于检测串口是否有数据可读或是否可以写入数据。
在本文中,我们将详细介绍Linux串口poll()函数的工作原理。
我们需要了解什么是串口。
串口是一种用于在计算机和外部设备之间传输数据的接口。
在Linux系统中,串口通常被表示为特殊文件,例如/dev/ttyS0或/dev/ttyUSB0。
通过这些特殊文件,我们可以读取和写入串口数据。
在Linux系统中,我们可以使用poll()函数来监测串口的状态。
poll()函数是一个系统调用,它可以等待一个或多个文件描述符(包括串口文件描述符)上的事件发生。
当有事件发生时,poll()函数将返回,并告诉我们哪个文件描述符上发生了事件。
在使用poll()函数之前,我们需要创建一个pollfd结构体数组,并将需要监测的串口文件描述符加入到数组中。
pollfd结构体定义如下:```cstruct pollfd {int fd; // 文件描述符short events; // 要监测的事件(读、写或错误)short revents; // 实际发生的事件};```在创建pollfd结构体数组后,我们需要设置需要监测的事件。
在串口中,我们通常需要监测以下事件:- POLLIN:表示文件描述符上有数据可读。
- POLLOUT:表示文件描述符上可以写入数据。
- POLLERR:表示文件描述符上发生了错误。
在设置完事件后,我们可以调用poll()函数来等待事件的发生。
poll()函数的原型如下:```cint poll(struct pollfd *fds, nfds_t nfds, int timeout);```其中,fds是指向pollfd结构体数组的指针,nfds是数组中的文件描述符数量,timeout是等待的超时时间(以毫秒为单位)。
如果timeout为负数,则表示无限等待,直到有事件发生为止。
linux 串口接收原理
linux 串口接收原理
(原创实用版)
目录
一、串口通信基本原理
二、Linux 下串口接收原理
三、Linux 下串口接收编程实例
四、总结
正文
一、串口通信基本原理
串口通信(Serial Communication)是一种外设和计算机之间通过数据信号线、地线等按位进行数据传输的通讯方式。
与并行通信相比,串口通信只有一条数据线,因此传输速度较慢,但线路简单、成本低。
串口通信的数据格式通常为:起始位、数据位、校验位和停止位。
在传输过程中,数据位之间没有固定的时间间隔要求,波特率决定了每一位信号的宽度。
通讯方式主要有单工模式、半双工模式和全双工模式。
单工模式只能单向传输,半双工模式可以在两个方向上传输,但不能同时进行发送和接收,全双工模式则允许数据同时在两个方向上传输。
二、Linux 下串口接收原理
在 Linux 系统中,串口设备通常表示为/dev/ttySx,其中 x 为串口设备的编号。
Linux 系统提供了一系列的 API 来实现串口通信,其中最主要的是 posix 的 serial 接口和 Linux 特有的 termios 接口。
串口接收的原理是:在打开串口设备后,通过调用 read、readline 或poll 等系统调用,从串口设备读取数据。
一般情况下,read 系统调用用于接收单个字符,而 readline 系统调用用于接收一行数据。
第1页共1页。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
linux 读取串口数据方法
【原创实用版2篇】
目录(篇1)
一、Linux 读取串口数据的方法概述
二、使用 C 语言读取串口数据
三、使用 Qt 库读取串口数据
四、使用 Python 读取串口数据
五、总结
正文(篇1)
一、Linux 读取串口数据的方法概述
在 Linux 系统中,串口是一种常用的设备接口,可以用于接收和发送数据。
Linux 提供了多种方法来读取和操作串口数据。
本文将介绍几种常见的方法,包括使用 C 语言、Qt 库和 Python 语言来读取串口数据。
二、使用 C 语言读取串口数据
1.打开串口
在 C 语言中,打开串口需要使用 fcntl 函数。
首先,需要包含头文件<fcntl.h>和<termios.h>。
然后,使用以下代码打开串口:```c
int fd = open("/dev/ttyS0", O_RDWR);
if (fd < 0) {
perror("Can"t Open Serial Port");
return -1;
}
```
2.设置串口速度
打开串口成功后,需要设置串口的波特率、数据位、校验位和停止位等参数。
可以使用以下代码设置串口速度:
```c
struct termios tty;
if (tcgetattr(fd, &tty)!= 0) {
perror("Can"t Get Serial Port Attributes");
return -1;
}
tty.c_cflag &= ~PARENB; // 清除奇偶校验位
tty.c_cflag &= ~CSTOPB; // 使用一个停止位
tty.c_cflag |= CS8; // 8 位数据位
tty.c_cflag &= ~CRTSCTS; // 禁用硬件流控制
tty.c_cflag |= CREAD | CLOCAL; // 使能读和忽略 modem 控制线if (tcsetattr(fd, TCSANOW, &tty)!= 0) {
perror("Can"t Set Serial Port Attributes");
return -1;
}
```
3.读取串口数据
使用以下代码读取串口数据:
char buf[64];
int len = read(fd, buf, sizeof(buf));
if (len < 0) {
perror("Can"t Read from Serial Port");
return -1;
}
printf("Read data: %s
", buf);
```
三、使用 Qt 库读取串口数据
在 Qt 中,可以使用 QSerialPort 类来读取串口数据。
首先,需要包含头文件<QSerialPort>。
然后,使用以下代码打开串口:```cpp
QSerialPort serialPort;
if (!serialPort.open("/dev/ttyS0")) {
qDebug() << "Can"t open serial port";
return -1;
}
```
2.设置串口速度
设置串口速度的方法与 C 语言类似,可以使用以下代码设置串口速度:
serialPort.setBaudRate(QSerialPort::Baud9600);
serialPort.setDataBits(QSerialPort::Data8);
serialPort.setParity(QSerialPort::NoParity);
serialPort.setStopBits(QSerialPort::OneStop);
```
3.读取串口数据
使用以下代码读取串口数据:
```cpp
QByteArray data = serialPort.readAll();
qDebug() << "Read data:" << data;
```
四、使用 Python 读取串口数据
在 Python 中,可以使用 pyserial 库来读取串口数据。
首先,需要安装 pyserial 库。
目录(篇2)
1.Linux 读取串口数据的概述
2.Linux 串口设备的配置
3.使用 Linux 内核模块读取串口数据
4.使用 Linux 用户空间程序读取串口数据
5.总结
正文(篇2)
【1.Linux 读取串口数据的概述】
在 Linux 系统中,串口是一种常用的数据传输接口,可用于连接各
种外部设备,如传感器、路由器等。
Linux 系统提供了丰富的串口操作接口,可以通过配置内核模块和使用用户空间程序实现串口数据的读取。
本
文将介绍如何在 Linux 系统中读取串口数据。
【2.Linux 串口设备的配置】
在 Linux 系统中,串口设备通常表示为/dev/ttySx 或/dev/ttyUSBx。
要使用这些设备,首先需要配置它们。
可以使用以下命令查看当前系统中
可用的串口设备:
```bash
ls /dev/ttyS*
```
或
```bash
ls /dev/ttyUSB*
```
接下来,可以使用以下命令配置串口设备:
```bash
sudo stty -F /dev/ttySx speed baudrate parity 奇偶校验hardwareflowcontrol
```
其中,x 表示串口设备的名称,如 S0 或 USB0。
speed 表示波特率,baudrate 表示奇偶校验,hardwareflowcontrol 表示硬件流控制。
【3.使用 Linux 内核模块读取串口数据】
Linux 内核提供了一系列串口操作相关的模块,可以通过在内核中加载这些模块,然后使用模块提供的接口函数读取串口数据。
以下是一个简单的示例:
```c
#include <linux/serial.h>
#include <linux/module.h>
static int __init my_serial_init(void)
{
struct serial_device *serdev;
int ret;
serdev = serial_find_device_by_name("ttyS0");
if (!serdev) {
printk(KERN_ERR "找不到串口设备
");
return -EINVAL;
}
ret = serial_open(serdev, NULL);
if (ret) {
printk(KERN_ERR "打开串口设备失败
");
return ret;
}
while (1) {
int len = vfs_read(serdev->file, buffer, sizeof(buffer), &file->f_pos);
if (len > 0) {
printk(KERN_INFO "接收到数据:%s
", buffer);
}
msleep(100);
}
serial_close(serdev);
return 0;
}
static void __exit my_serial_exit(void)
{
printk(KERN_INFO "模块卸载
");
}
module_init(my_serial_init);
module_exit(my_serial_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("AI Assistant");
MODULE_DESCRIPTION("Linux 串口数据读取示例");
```
上述代码通过内核模块实现了串口设备的打开、读取数据和关闭操作。
需要注意的是,使用内核模块进行开发需要具备一定的 Linux 内核编程
基础。
【4.使用 Linux 用户空间程序读取串口数据】
除了使用内核模块,还可以使用用户空间程序读取串口数据。