数字式振动控制器介绍
数字式电机保护控制器TDHD-EP说明书

3
0:不使用, 1-20/1r-C使用
7
0:不使用, 5-90/5[%]使用
0
0:直接动作, 1-60/1秒:05-0.6/0.01[A]
0:不使用, 0.05-0.6A/0.01A
G-C 接地保护
0
EPN:0:接地功能不使用 0.5-6.0/0.1[A]
0:不使用, 0.5-6A/0.1A
否则产品可能发生火灾或变形.
5.电线与产品连接时应该电线不要过紧同时连接端子处必须拧紧。
如果电线从保护器上松动或分离,会有触电、损害装置、失火等危险。
6.在接线和其它电气操作之前请确定断开电源。
接错线有可能会损坏产品。
7.除了专业的技术人员之外产品不要私自拆开或修理。
有可能被电击误操作或发生火灾。
8.不要用螺丝锥,大头针等物品挤压产品。
0-80秒/1秒 0-120秒/1秒
0-80/1class
动作时间 Sdt+odt Sdt+class
备注
启动延时内不 检测过电流
动作时限
定时限
缺相 不平衡
缺相、不平衡特
设定范围
动作时间
备注
0:不用 1:使用
0:不用 5-50%/5%
≤3.0秒 ≤5.0秒
× Imax-Imin
Sdt时间以 Imax
小于5VA
输入电源
AC85-245V 50HZ/DC85-245V
输入点
2点
和操作电源相同
功能
LOP输入信号,外部ON/OFF控制信号
开关容量 输出点
阻性负载:5A,感性负载:1.5A〔cos=0.4
3〕点
ON/OFF控制
接到控制电源
环境振动监测仪使用方法说明书

环境振动监测仪使用方法说明书1. 产品概述环境振动监测仪是一种用于测量、记录和分析环境中振动水平的设备。
它适用于建筑、交通、工程、矿山等领域,帮助用户监测和评估振动对周围环境和结构物的潜在影响。
本说明书将详细介绍环境振动监测仪的使用方法,以确保用户正确、高效地操作设备。
2. 仪器结构及操作界面(1)仪器结构环境振动监测仪主要由控制器和传感器两部分组成。
控制器包括显示屏、操作按钮和数据存储设备等,用于配置参数、查看数据和进行数据分析。
传感器用于测量环境中的振动信号。
(2)操作界面显示屏位于控制器的正面,用于显示实时振动数据、存储容量、电池电量等信息。
操作按钮位于控制器的侧面或底部,包括开关机、功能选择、菜单导航等按钮。
3. 准备工作(1)仪器正常启动前,请确保电池电量充足或接入稳定的电源。
(2)根据实际需要选择合适的传感器,并正确连接至控制器。
4. 参数设置(1)按下开关机按钮,待仪器启动后,进入参数设置界面。
(2)使用导航按钮上下移动至“参数设置”选项,并按确认按钮进入。
(3)根据实际需求,设置采样频率、采样时间、阈值等参数。
(4)设置完成后,按返回按钮退出参数设置界面。
5. 数据采集(1)确认参数设置完成后,按下开始按钮,仪器开始进行振动数据采集。
(2)在采集过程中,仪器将实时显示采集的振动数据。
(3)采集完成后,按下停止按钮停止数据采集。
6. 数据存储与传输(1)采集完成后,振动数据将自动保存至仪器的内部存储设备中。
(2)将仪器连接至电脑或其他外部设备,通过USB接口或蓝牙传输数据。
(3)在外部设备上使用对应的数据分析软件,导入并分析振动数据。
7. 数据分析与报告生成(1)使用数据分析软件,打开导入的振动数据文件。
(2)根据需要进行数据处理、频谱分析、滤波等操作。
(3)生成分析报告,包括振动水平评估、异常事件识别等内容。
8. 注意事项(1)使用前请详细阅读本说明书,并按照操作步骤正确操作仪器。
振动试验机技术参数
振动试验机技术参数振动试验机是一种用于模拟产品在运输、使用等过程中所受到的振动环境的测试设备。
它可以通过模拟不同的振动环境,对产品的可靠性、耐久性等进行测试评估。
在振动试验机的使用过程中,技术参数是非常重要的参考指标。
下面将介绍振动试验机的技术参数及其意义。
1. 振幅振幅是指振动试验机在工作过程中产生的振动幅度,通常用毫米或英寸表示。
振幅的大小直接影响到试验结果的准确性和可靠性。
如果振幅过小,则无法模拟真实的振动环境,试验结果可能不准确;如果振幅过大,则可能会对试验样品造成损坏,影响试验的可靠性。
2. 频率范围频率范围是指振动试验机能够模拟的振动频率范围,通常用赫兹表示。
不同的产品在运输、使用等过程中所受到的振动频率范围是不同的,因此振动试验机的频率范围需要根据不同的产品进行调整。
如果频率范围过小,则无法模拟真实的振动环境,试验结果可能不准确;如果频率范围过大,则可能会对试验样品造成损坏,影响试验的可靠性。
3. 最大负载最大负载是指振动试验机能够承受的最大负载,通常用千克或磅表示。
不同的试验样品在重量上是不同的,因此振动试验机的最大负载需要根据不同的试验样品进行调整。
如果最大负载过小,则无法承受试验样品的重量,影响试验的可靠性;如果最大负载过大,则可能会对试验样品造成损坏,影响试验的可靠性。
4. 控制方式控制方式是指振动试验机的控制方式,通常分为模拟控制和数字控制两种。
模拟控制是通过模拟电路来控制振动试验机的振动参数,控制精度相对较低;数字控制是通过数字控制器来控制振动试验机的振动参数,控制精度相对较高。
不同的试验需求需要选择不同的控制方式。
5. 振动方向振动方向是指振动试验机的振动方向,通常分为单向振动和多向振动两种。
单向振动是指振动试验机只能在一个方向上进行振动,多向振动是指振动试验机可以在多个方向上进行振动。
不同的试验需求需要选择不同的振动方向。
综上所述,振动试验机的技术参数是非常重要的参考指标,不同的试验需求需要选择不同的技术参数。
数字高频调谐器原理与结构分析

数字高频调谐器原理与结构分析数字高频调谐器是一种用于调节高频信号的设备,它在无线通信、雷达、无线电广播等领域有着广泛的应用。
本文将对数字高频调谐器的原理和结构进行分析。
首先,我们来了解数字高频调谐器的原理。
数字高频调谐器主要通过改变电路中的电容和电感来实现对高频信号的调节。
在高频电路中,电容和电感的数值会对信号的频率产生影响。
通过调节电容和电感的数值,可以改变电路的谐振频率,从而实现对高频信号的调谐。
在数字高频调谐器中,电容和电感的数值是通过数字信号来控制的。
通常,数字高频调谐器采用数字电位器来实现对电容和电感的调节。
数字电位器是一种可以通过数字信号来控制的电阻器,通过改变电阻值来改变电容和电感的数值。
当数字信号的数值改变时,电位器的电阻值也会相应改变,从而实现对电容和电感的调节。
除了数字电位器,数字高频调谐器还包括一个数字控制器。
数字控制器是用于控制数字电位器的运行的芯片或模块。
数字控制器通过接收外部的控制信号,来控制数字电位器的工作状态。
通过改变数字控制器的工作模式和参数设置,可以实现对数字电位器的精确控制,从而实现对电容和电感的精确调节。
此外,数字高频调谐器还包括一个高频信号输入端和一个高频信号输出端。
高频信号输入端用于接收待调谐的高频信号,而高频信号输出端用于输出经过调谐后的高频信号。
在数字高频调谐器中,高频信号经过电路中的电容和电感的调节后,其频率和幅度会发生变化,从而实现对高频信号的调谐。
总结起来,数字高频调谐器通过改变电路中的电容和电感来实现对高频信号的调谐。
通过数字电位器和数字控制器的配合,可以实现对电容和电感的精确控制。
数字高频调谐器在无线通信、雷达、无线电广播等领域有着广泛的应用,为高频信号的调节提供了一种有效的解决方案。
以上是对数字高频调谐器原理和结构的简要分析。
数字高频调谐器作为一种重要的调节设备,在无线通信领域发挥着重要的作用。
希望通过本文的介绍,能够对数字高频调谐器有更深入的了解。
DK-03 型电磁振动给料控制器 使用说明书
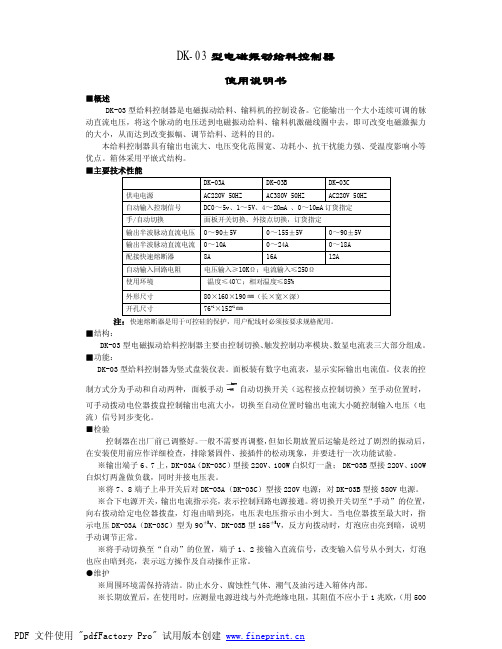
DK-03型电磁振动给料控制器使用说明书■概述DK-03型给料控制器是电磁振动给料、输料机的控制设备。
它能输出一个大小连续可调的脉动直流电压,将这个脉动的电压送到电磁振动给料、输料机激磁线圈中去,即可改变电磁激振力的大小,从而达到改变振幅、调节给料、送料的目的。
本给料控制器具有输出电流大、电压变化范围宽、功耗小、抗干扰能力强、受温度影响小等优点。
箱体采用平嵌式结构。
■主要技术性能DK-03A DK-03B DK-03C供电电源AC220V 50HZ AC380V 50HZ AC220V 50HZ自动输入控制信号DC0~5v、1~5V、4~20mA 、0~10mA订货指定手/自动切换面板开关切换、外接点切换,订货指定输出半波脉动直流电压0~90±5V 0~155±5V 0~90±5V输出半波脉动直流电流0~10A 0~24A 0~18A配接快速熔断器8A 16A 12A自动输入回路电阻电压输入≥10KΩ;电流输入≤250Ω使用环境温度≤40℃;相对温度≤85%外形尺寸80×160×190㎜(长×宽×深)开孔尺寸76+1×152+1㎜注:快速熔断器是用于可控硅的保护,用户配线时必须按要求规格配用。
■结构:DK-03型电磁振动给料控制器主要由控制切换、触发控制功率模块、数显电流表三大部分组成。
■功能:DK-03型给料控制器为竖式盘装仪表。
面板装有数字电流表,显示实际输出电流值。
仪表的控制方式分为手动和自动两种,面板手动- 2 -伏兆欧表测量)。
■DK 型给料控制器采用屏镶式安装方式 ●外部接线图端子接线说明:手动/自动 控制自动输入1234电磁铁A C 220V快速熔断器56781.端子1、2为自动状态,4~20mA 输入端子;2.端子3、4为手/动切换无源接点输入,该接点闭合为手动状态,面板指示灯手动亮;断开为自动状态,面板指示灯自动亮。
数字控制器的说明书
数字控制器的说明书一、产品概述数字控制器是一种用于控制机械或电子设备的高性能控制器。
本说明书将详细介绍数字控制器的特点、功能、参数以及使用方法,旨在帮助用户充分理解和正确操作本产品。
二、产品特点1. 高精度控制:数字控制器采用先进的控制算法,具有精确的控制能力,可满足精密加工和控制的需求。
2. 大容量存储:集成的存储器能够存储大量的控制程序和数据,方便用户进行多样化的控制操作。
3. 多种输入输出接口:数字控制器提供多种输入输出接口,可连接各类传感器、执行器以及其他设备,实现多样化的控制连接方式。
4. 友好界面:数字控制器配备了直观、易操作的用户界面,用户可以通过触摸屏或控制按钮轻松操作控制器。
5. 稳定可靠:数字控制器具有稳定可靠的性能,适用于长时间连续工作,保障设备的正常运行。
三、产品功能1. 数字控制:数字控制器可以根据用户设定的控制参数,通过控制算法,自动精确控制相应设备的运动、位置、速度等。
2. 数据处理:数字控制器能够实时处理各类传感器采集到的数据,并根据特定算法进行运算和判定,实现对设备状态的监测和控制。
3. 通信接口:数字控制器具备通信接口,可以与上位机、网络等进行数据传输和控制指令的交互。
4. 编程功能:用户可以通过编程方式,灵活配置控制器的工作模式和控制逻辑,满足不同应用场景下的需求。
5. 故障诊断:数字控制器内置了强大的故障诊断功能,能够及时检测设备运行中的异常情况,并提供相应的报警和处理方法。
四、使用方法1. 连接设备:将数字控制器与待控制的机械或电子设备进行正确连接,确保信号传输正常。
2. 电源接入:将数字控制器连接到电源,确保电源供应稳定。
3. 参数设置:通过用户界面进行控制参数的设置。
用户可以根据实际需求,设置相关参数,如运动速度、位置等。
4. 控制操作:按照设定的参数和控制逻辑,进行控制操作。
用户可以通过触摸屏或控制按钮进行操作控制器。
5. 监测与调整:用户可以通过数字控制器的监测功能实时监测设备状态,并根据需要进行相应的调整和修改。
数显回旋振荡器参数
数显回旋振荡器参数1. 什么是数显回旋振荡器数显回旋振荡器是一种电子设备,用于产生可调节频率的正弦波信号。
它通常由振荡电路和显示控制电路两部分组成。
振荡电路负责产生信号,而显示控制电路则用于将产生的信号以数显形式显示出来。
2. 数显回旋振荡器参数数显回旋振荡器的性能取决于多个参数,下面将对其中几个重要的参数进行详细介绍。
2.1 频率范围数显回旋振荡器的频率范围指的是它能够产生正弦波信号的频率范围。
通常以赫兹(Hz)为单位表示。
不同型号的数显回旋振荡器具有不同的频率范围,一般可以在设备上进行调节。
2.2 频率分辨率频率分辨率是指数显回旋振荡器能够调节频率时的最小变化量。
它决定了设备可以提供多精确的频率控制。
通常以赫兹为单位表示。
2.3 输出幅度输出幅度是指数显回旋振荡器产生的正弦波信号的峰值电压。
它通常以伏特(V)为单位表示。
不同型号的设备具有不同的输出幅度范围,一般可以在设备上进行调节。
2.4 相位偏移相位偏移是指数显回旋振荡器产生的正弦波信号相对于参考信号的相位差。
它可以用角度或时间来表示。
相位偏移可以通过调节设备上的参数来进行控制。
2.5 谐波失真谐波失真是指数显回旋振荡器输出信号中包含的非基波成分。
它会导致信号形状发生畸变,影响信号质量。
谐波失真通常以百分比或分贝为单位表示,较低的数值表示较小的失真。
2.6 稳定性稳定性是指数显回旋振荡器在长时间运行过程中产生信号频率变化的程度。
稳定性越高,产生的信号频率变化越小,反之亦然。
稳定性通常以百万分之几或百分之几的频率变化来表示。
3. 使用数显回旋振荡器的注意事项在使用数显回旋振荡器时,需要注意以下几点:•在操作设备之前,确保已经仔细阅读和理解设备的使用说明书,并按照说明进行正确操作。
•预热时间:由于数显回旋振荡器中的元件需要达到稳定工作温度,因此在使用之前需要进行一定时间的预热。
具体预热时间可以参考设备的说明书。
•频率调节:在调节频率时,应该缓慢地转动频率控制旋钮,避免快速调节导致信号不稳定或产生杂散频谱。
C10-4DM(Manual_DM_series)日本神钢振动控制器手册
1. Introduction 12. Safety Instructions 23. Precautions for operation 54. Structure and Name of Part 65. Installation 76. Check and Adjustment of Resonance point 87. Trouble Shooting 98. Readjustment 109. Specifications 11 10. Outline Drawing 12 11. Guarantee13The version C (DM-**C) prartsfeeder drive unit has a connector for power supply .Instruction Manual for Dual Motion Partsfeed erModel DM-30C, -38C, -45CBefore operating your dual motion partsfeeder , you and/or any other operator shall read and follow the safety instructions carefully to operate the equipment correctly , properly and safely . Then the instructions save you from any accident and/or injury and/or, any damage and/or loss of your property . The safety instructions are classified by the degree of injury and damage such as “Danger”, “W arning”, “Caution” and “Request”.■ Please keep the instruction manual on file as any operator is able to read and refer to it.■ When you transfer or rent the equipment to the other you are required to submit the instructionmanual, coming to the user’s attention, along with the equipment. The user shall operate the equipment correctly , properly and safely .■ Those Safety instructions do not necessarily cover all danger , accident and/or damage. Pleasealways follow the safety instructions and act the safety first attitude.● Do not use the equipment in an environment where inflammable gases exist. The equipment hasno explosion-proof structure and then the use should cause an explosion or a fire.● The equipment must be installed firmly on a rigid base to avoid an accidental injury by topplingdown, falling and/or abnormal running of it.● Do not sprinkle the equipment with thinner, organic solvent, water , oil and oil products. It maycause any injury by abnormal running, getting a shock and a fire.● Cut off the power , first of all, with a safety disconnect switch supplied by you before wiring,cleaning and maintaining the equipment.● Do not operate the equipment in any vacuum chamber .-Please surely read this instruction manual- 2. Safety Instructions .● Do not operate the equipment over the specifications agreed upon. The operation over thespecifications must result in damage, malfunction and/or short lifetime of it.● Do not climb up on and/or put something heavy on the equipment to avoid an accidental injury bytoppling and/or falling down, and/or damage and/or abnormal running of the equipment.● Do not damage the power cable and wirings to the equipment, such as abrasion of coating andover bending, tensioning, coiling down, loading heavy weight on and/or pinching wires. The damage of a cable causes leakage and/or mal-conduction, which leads to a fire, getting workers shocked and/or abnormal running of the equipment.● Wire the equipment correctly and properly consulting this instruction manual. Any wrong wiringleads to abnormal running and/or breakdown.● Inspect and make sure the wiring before turning on the power .● The ground line must be connected on the ground terminal in the controller . The equipment mustbe operated with ground without fail.● Do not connect or disconnect connecters while the power is turning on. Do not stress the connectercarelessly otherwise workers should be injured or get shocked and the equipment must be damaged.● Keep sufficient maintenance space around the equipment. Small space makes the maintenancework difficult and poor maintenance must damage the equipment● Install the equipment in a clean and dry room. It has no dust-tight structure.● n the case of carrying a equipment, lift it with its mounting base or the stand on which theequipment is installed. Do not pull and lift it with the power cable.● Install the equipment on a horizontal rigid frame or stand. The mounting base of the equipmentshould be bolted on the frame. In the case of a weak frame, vibration of the equipment may spread into it andcause resonance of the frame. The resonance affects the vibration of the equipment being mal-functioned.● If you provide a weak bowl on the equipment the work pieces must be jumping on the both end ofthe bowl.● The equipment must provide a genuine controller to the model.-Continued-Warning● Keep clearance around the equipment and avoid the bowl or drive unit to hit against any object.Hitting against any object results insufficient stroke of the equipment and clattering noise.● Do not get the surface of the bowl dirty with oil, moisture, dust etc. The dirty bowl cannot handlework pieces.● Stop running at once when you hear any clattering noise or humming of the equipment. Checkand remove the cause of the noise. Running without maintenance must cause severe and non-restored damage on the equipment.● Any operator should wear safety shoes and work gloves to handle a equipment.● Y ou have to pay attention and take safety measures such as enough allowance to the specificationsand the rating, and/or a fail-safe system, when you want to use the equipment in unspecified environment and/or circumstance by the specifications agreed upon otherwise the use of the equipment may endanger any person or property .● Where the equipment becomes out of order and/or disused, it should be an industrial waste subjectto local regulation.● Install the equipment on a horizontal rigid frame or stand free from heat, dust, humidity ,condensation or freezing.● In case the work pieces are charged or magnetized, poor feeding rate or miss-orientation will occur.Look and analyze the troubled phenomenon exactly and take proper countermeasure.● The bowl must be designed so that the moment of inertia about the center axe, along the conveyingdirection, of the bowl must be symmetrical on the moving frame of the equipment. Un-symmetry results insufficient stroke. Y ou have to pay attention to the length, weight, rigidity and moment of inertia of the bowl.● Where you would manufacture and tool the bowl and attachments it would break the symmetryabout mass or moment of inertiaof the bowl.The un-symmetry slows downor fluctuate the conveying speed of work pieces. Y ou should attach small pieces of weight on the bowl to balance and symmetrize the mass and moment.The product of SINFONIA TECHNOLOGY has been fully balanced and symmetrized in the shop.Danger!Caution!A place subject tolarge vibrationHot and moist place OutdoorsDon’t use the partsfeeder where inflammable gases exist.It has no explosion proof structure and will cause an explosion and/or fire.Don’t use the partsfeeder any place shown below . An electric leak, damage and/or deterioration of the partsfeeder should result.3. Precautions for operationCaution!the bowl.should result. Before making any weld on the bowlCaution!B.Before making any weld on the bowl connect Disconnect!Bowl mounting center boltUpper movable frame Horizontal movable core Horizontal fixed core coilFixed frameIsolation rubber Horizontal stroke sensor Lower movable frame Vertical fixed core coilDistance piece Bowl is of circumferential mounting or center mounting depending upon the using conditions.Vertical leaf springVertical stroke sensorHorizontal leaf spring(circumferential mounting) Bowl mounting bolt4 . Structure and Name of Part5. Installation6. Check and adjustment of the resonance point7. Trouble shootingIf any abnormal movement is there please check the following items and those of the instruction manual for the exclusive controller. After that, you would still have a problem please consult it our agent or Sinfonia T echnology.Trouble Checking ItemA. Partsfeeder doesn't runB. The stroke is not enoughC. The stroke is too muchD. The unit is vibrating butwork pieces stay in the bowlE. Clattering metal soundF. Sudden reverserotating movement1. Horizontal stroke must be null, check it with a stroke indicatorVertical stroke must be null, set the horizontal stroke nulland check the vertical stroke.If horizontal or vertical stroke might be null, please check the items below:1-1. Is the stroke setting on the controller suitable?2-2. Is the wiring between the unit and the partsfeeder correct?2-3. Is there any breakage on the power cable and/or the magnet coil?Remove the power cable and test it with a universal tester2 .Is the phase difference set on the controller suitable?1. Is anything strike against the bowl or drive unit?2. Is there any loose bolt, the bowl mounting bolt or isolator feet?3. Is there anything dancing on the base frame?4. Do the cores with a narrow gap strike mutually?Or does anything come into the gap?See page 10 to check the gap5. Does the stroke sensor with a narrow gap strike against the leafSee page 10 to check the gap1. Check the resonance points, the horizontal and vertical.See page 8 readjust them1. T oo wide gap between the stroke sensor and the leaf spring,so that the sensor cannot detect the leaf spring.See page 10 to check the gap2. In case of vertical stroke is too much, readjust the resonance pointSee page 8 to adjust it1. Small stroke setting on the controller2. T ransportation lock metal fittings are still set3. Lack of rigidity of the installing base or structure4. T oo wide gap of magnet cores or small pulling powerSee page 10 to check the gap5. In case of small vertical stroke, readjust the resonance pointSee page 8 to adjust it1. W rong setting and/or operation of the controller2. W rong wiring between the partsfeeder and the controller8. Readjustment9. Specifications10. Outline11. GuaranteeSinfonia T echnology parts feeder DM-30C, -38C, -45C when used in accordance with the manufacturer’s Instruction Manual and under normal use is guaranteed for one year after the date of shipment. Within the period Sinfonia Technology Co., Ltd. will repair or replace free of charge, at its sole discretion, all parts that are defective because of material or workmanship, not including costs for removing or installing parts.Consumables such as isolation rubber, leaf spring, leaf spring shim, and their mounting bolts, etc. are out of guarantee.(1) Parts whose function is damaged because of wear by works are out of guarantee.(2) Isolation equipment (sensor, solenoid valve, etc.) is out of guarantee.(3) Do not make any alterations to the parts feeder without first contacting Sinfonia T echnology. Unauthorizedalteration will void the guarantee. Sinfonia T echnology will not assume responsibility for damage that mayoccur due to unauthorized alterations to the parts feeder.Sinfonia Technology reserves the right to alter at any time, without notice and without liability or other obligation on its part, materials, equipment specifications, and model. Sinfonia Technology also reserves the right to discontinue the manufacture of models, parts and components thereof.。
数字式控制器(PXW-5)使用说明书
数字式控制器(PXW-5)使用说明书规格型号1、器件型号及输入信号·温度控制器PXW-5-NEE1-8V Pt100·湿度控制器 PXW-5-BEY2-8V 4-20mA(1-5Vdc)·风压控制器 PXW-5-BEY2-8V 4-20mA(1-5Vdc)2、控制输出信号·4-20mAdc(负载电阻:小于 600Ω)·(如用2-10V直流电压信号请在输出端并上500Ω电阻)3、调节动作·PID控制·也可为两位控制或比例控制4、设定与指示精度·±0.5% FS±1数字5、供电电源·85-265 Vac,50/60 Hz故障指示1、控制器有故障指示功能,所以能快速诊断和排除故障。
2、故障排除后,必须先切断电源,再接通电源。
3、控制器异常显示和处理:各部分名称报警灯加热器断路报警灯控制输出2指示灯FUJI ℃工业值单位控制输出1指示灯○C1○C2○H○L○HBpv 1200PV(测量值)显示 sv· 1 2 0 0 .自整定指示灯SV指示灯SV(设定值)显示SEL ∧∨■■■SEL键增/减键(参数选择键)PXW-5操作键及功能基本操作方法1、PXW-5 的基本操作方法如下图所示:第 1 组参数第 2 组参数第 3 组参数2、第 2 组参数和第 3 组参数设定操作:5.1按SEL键P 5.0按SEL键∧∨4.9控制动作代码表主要参数表连接端子图Pt100输入 + ──○ 1 10 ○── +(或1-5V、4-20mA需接250Ω) 控制输出2(单输出型无)- ──○ 2 11 ○── 4-20mA──○ 3 12 ○── -──○ 4 13 ○──高报警输出+ ──○ 5 14 ○──低报警输出控制输出 14-20mA ──○ 6 15 ○──加热器断路报警输出- ──○ 7 16 ○──公共端电源──○ 8 17 ○──85--265 Vac50/60Hz ──○ 9 18 ○──使用注意事项1、接通电源,测量值 PV和设定值 SV 指示器显示....几秒钟后,显示测量值和设定值。
振动台技术参数
振动台控制器技术参数:频率范围:5-5000Hz频率显示方式:四位十进制LED数字浮点显示频率稳定性:±50ppm/℃输出电压:3Vrms(在压缩控制时为7 Vrms)正弦波频率响应:≤±0.5dB频率扫描方式:线性或对数扫频速率:0.1-10 oct/min扫频控制:扫描可在任意频率处返回停止(保持定频振动)和继续扫描测量范围:加速度1-2000m/s²速度0.1-200dm/s位移0.10-100mm(p-p)位移X0.1 0.01-20mm(p-p)测量精度:≤5%压缩总量:≥80dB压缩精度:≤±1dB压缩速度:随频率振动调节交越频率:三点设定振动:四段(每段可选择加速度、速度、位移)预置功能:可设置定频振动时间或扫频振动周期数,到设置值后自动停止时间设置:0.1-9998分钟周期设置: 1-9998个单程扫描设置:0000连续(周期或时间设置):9999暂停功能:在闭环定振时,可控制振动台暂停或恢复运行开环保护功能:在闭环定振时,一旦开路,自动停止,以防失控外控功能:为外部功率放大器提供零输出信号和预置周期或时间到信号控制仪外形尺寸:440mm×159mm×440mm重量:12kg工作条件:电源电压:220V±10% 50Hz 环境温度:0~40℃湿度:<85%GGJ系列压电加速度计需电荷放大器作为前置级,它内阻高一般输出交流值(用34401测量)为几十mV频率信号也可以经过电荷放大器放大后取出系统技术指标激振力:正弦:9800 N (1000kg.f)随机:7840 N (800kg.f)频率范围:垂直台:5Hz-3000Hz额定加速度:1176m/s²额定速度:0.85m/s额定位移:25mm (p-p)最多载荷:200kg运动部件有效质量:垂直台:8.3kg电源: 3相4线380V AC±10%50Hz消耗功率:20kV A连续工作时间:8h工作环境:温度0~40℃湿度≤90%RH (25℃)保护功能:本系统具有12种自动保护联锁功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
振动测试系统被广泛用于航空、航天、电子、汽车等领域的可靠性试验。
数字式振动控制器是一个可以为振动台提供闭环控制能力的计算机系统,是整个振动测试系统中的智能部分。
值得附带提出的是,早在80年代初,浙江大学的动态测试国家研究室和苏州实验仪器厂(苏试)就开始研发中国自己的振动控制器,浙大的杨世超教授是这个领域的先驱。
而现在,苏试是中国该领域唯一一家上市公司。
数字振动控制器产生电子信号驱动功率放大器,功率放大器再输出电流信号以驱动液压或电磁振动台,而作用于被测设备(UUT)上的振动响应反馈到振动控制器系统作为反馈控制信号。
在闭环控制环境下,控制信号必须在时域和频域都遵循某种预先设定的特性,这些特性可以按照不同的工业或者军事标准定义为:正弦Sine、随机Random、正弦+随机SoR、随机+随机RoR、经典冲击、冲击响应谱SRS、路谱仿真等。
大多数情况下,单轴的振动台对结构进行激励,在一些高端测试中需要使用多个振动台形成多轴多自由度的激励,在多个振动台同时使用的情况下,控制系统需要具有多输入/多输出(MIMO)的互通道信号计算能力。
用于多轴振动控制系统的技术比单轴系统要复杂的多,在本文中主要讨论单轴振动控制系统的情况。
控制信号要参考一个或多个从试件获得的测量信号,当发现控制信号与测试目标模型有偏差时,将调整驱动信号使控制信号趋近目标模型,控制系统实时、连续地对振动台进行动力修正以达到精确的控制,安全性检测通过一个分布式的不依赖于PC计算机的运算处理结构来进行。
下图说明了闭环控制的过程,传感器(如加速度计)用于测量试件的振动响应形成被控制信号。
随机控制器将连续输出一个随机信号(驱动信号),其功率谱密度为预定义的频谱形状,这个预定义了形状的功率谱称为目标谱。
正弦控制器将连续以某个确定的电压值输出一个扫频正弦信号,所以控制信号是类正弦信号,并且遵循预定义的幅值谱。
经典冲击控制器在时间域中定义需要的控制目标模型。
SRS控制在冲击响应谱中定义目标模型。
路谱仿真控制器将一个长时间的时域信号定义为目标模型。
正弦加随机或随机加随机也称为混合模式控制,把随机和其它控制模式结合在一起,其测试设置也更为复杂。
据估计市场上近乎100%的控制器都要求具有随机和正弦控制功能,大约50%要求有经典冲击功能。
混合功能和SRS、瞬态历程及路谱仿真需求相对较少,只在一些特殊测试中需要。
即使只有一个激励源,从试件上进行多点测量也是需要的,多点测量可用于如下一些需要:当使用多点输入作为控制通道时,用户可以选择不同的控制策略参数,如平均、最大或最小。
如平均控制策略以全部测量通道的和为控制通道,并且平均结果在频域可以以不同的权重比进行。
第一代控制器-独立式美国最早的数字振动控制器是在20世纪70年代由一些HP的工程师研发的。
他们在早期最成功的信号分析仪HP5451上测试了多种控制算法。
HP5451是基于小型机HP2100的一台设备,其内存和计算能力都很有限,工程师们使用了多种巧秒的办法取得了达到几千赫兹的实时带宽。
Ron Potter和 Peter Moseley两位为这一早期的控制器作出了重大的贡献。
HP5451动态分析系统在HP公司以HP5451成功地测试了这一算法后,HP5427作为一款商业化的产品在上世纪80年代出现。
它由一些可堆叠的机箱组成,有专业的显示器和控制面板。
HP5427是一款非常成功的产品,却由于惠普公司战略的调整而最终被放弃。
在上世纪70年代早期,另两位发明者,Edwin Sloane 和 Charles Heizman 在一家名为Time Data的公司工作,取出得了一项随机振动控制的专利权。
Time Data后来被GenRad公司收购后,发布了他们的独立式控制系统。
GR25xx几乎是上世纪70年代后期最成功的控制器。
下面是GenRad 振动控制器系统的照片:GenRad 2506后来GenRad的振动控制部门成为了Spectral Dynamics公司的一部份,Marcos Underwood博士是GenRad控制器的总工。
在算法研发上,他专注于用“误差”控制取代HP采用的比例控制。
Tony Keller也同样早期为控制器的研发做出了巨大的贡献。
DEC公司的PDP系列小型机是振动控制器的硬件平台。
在上世纪80年代早期,LMS与HP合作,为HP的新硬件系统(Paragon)提供了全部的振动控制软件,LMS与HP的关系就有如微软公司与IBM的PC 的关系。
最终相比只提供硬件的IBM和HP,LMS和微软证明了软件销售更为重要。
早期的另一些厂商如Ling Electronics、MB Dynamics、Schlumberger 等。
由于都采用专用的硬件设备,早期的VCS系统售价在8~20万美元间,并且操作时需要非常仔细,然而得益于上世纪80年代航天、汽车和军事工业对结构测试的巨大需求,振动控制行业诞生了。
很多今天使用的控制算法都是在当时产生的。
规定大多数复杂的环境测试标准(包含了振动测试)的军标810标准,也是在那一时期建立起来的。
第二代振动控制器—基于PC的控制器在上世纪90年代,IBM PC机在工业上得以应用。
许多公司开始采用PC 机进行数据采集和动态信号分析。
Sri Welaratna 和 Dave Snyder两位原惠普公司的专家创建了Data Physics公司。
Lansmont公司一项目与Data Physics 的合作开发计划,开发基于PC机的数字式振动控制系统,最终造就了Lansmont 公司的TTVI和DP公司的DP540控制器。
这些早期的基于DOS操作系统的控制器具有在那个时代难得的图形用户界面。
DP540采用了多块ISA总线的插入式DSP卡,每块卡有多个DSP处理器及A/D,D/A转换芯片。
这一产品取得了巨大的成功。
Data Physics DP540按照与DP540和DP550(Windows版的DP540)同样的思路,其它一些厂家也发布了他们的基于PC的振动控制器,如SD公司的Puma,UniDyn公司的DVC,Unholtz-Dickie公司的VWin等。
第二代振动控制器的产生得益于PC机和专用DSP处理器的发展,大大提高了其性能和易用性,同时成本却下降了。
PC机的引入,使得显示、报告功能、连接性和系统性能极大地提高了。
价格的持续下降使振动控制器系统能用于更多的商业应用中,如电子产品和包装测试领域。
在系统价格下降的同时,振动控制器产品的市场规模却年复一年地在增长。
第二代振动控制器系统的缺点主要在于,系统过于依赖PC机的性能。
这主要是由于其控制回路要通过PC CPU的安装在PC中的插卡。
很多控制器使用ISA 总线,其控制回路时间受限于PC ISA总线的中断和传输带宽。
除了PC结构,LMS和M+P仍然依赖于HP的硬件来构建其软件系统,并采用UNIX操作系统,其产品包括Paragon 和 VXI 系统。
他们主要面向那些在测试过程中需要大量同步数据采集的高端用户。
第三代振动控制器,PC 作为外围控制端的控制器在上世纪90年代Dactron 公司以开发新一代的振动控制器,Zhuge博士认为原有的系统存在技术上的缺陷,并且发现了改进的切入点。
虽然这一代产品仍然使用PC机,但PC作用已经是外围设备了,因为在这种新的控制器中,控制回路已经不再经过PC机了。
采用这一策略后实现了更加快速的回路控制时间。
同时由于采用了浮点DSP处理器,在这一控制器中还实现了多种新的算法。
LASER是一个采用了多个浮点DSP处理器、24位∑-⊿型A/D转换芯片,以及PCI、USB总线等技术的振动控制器产品。
应用软件系统采用微软MFC开发。
新框架及新技术使得系统具有许多功能的同时仍然保持了易用性。
Dactron 公司的LASER系列产品取得了巨大的成功,数千台Dactron公司的LASER系统已经安装在世界各地。
2001年LDS公司收购了Dactron,LDS是当时世界上最大的电磁振动台生产商,现在LDS已成为丹麦B&K 公司的一部份。
LDS-Dactron LASER在Dactron公司发布了LASER和Comet后,许多其它公司包括VRC和DP也发布控制回路独立于PC的第三代振动控制器系统。
第四代振动控制器—完全网络化的控制器2010年,美国晶钻仪器公司(Crystal Instruments) 发布了Spider-81,最新一代的振动控制系统。
Spider-81充分采用了最新的硬件设计,信号处理算法和新的软件技术。
Spider-81 数字式振动控制器Spider-81是第一个基于网络并支持IEEE 1588时间同步技术的振动控制系统。
其基本模块可设置为4或8通道,且附加通道数可扩展了1024个。
它提供了非常高的灵活性、测试精度和易用性。
Spider-81配置了一个通道、明亮的LCD显示,数字I/O接口,内置备用电池和前面板控制键。
Spider-81使用以太网接口。
作为第4代控制器Spider-81具有以下一些特点:以数字信号处理器为主控的结构与传统控制器过重依赖于外部计算机进行实时操作不同,Spider是第一个将时间同步以太网连接与嵌入式DSP直接直接集成在一起的控制器。
这一策略极大地增强了控制性能、系统可靠性和异常保护能力,使得系统可以配置极大的通道数却不影响系统性能。
最新的硬件设计Spider-81模块装备有电压主、电荷和IEPE输入通道,可适用于冲击、振动和声学测试及其它通用的电压信号测量。
其内部闪存可以同时储存数百个通道的测试配置数据和实时分析数据。
多个输出通道提供了各种与输入采样频率同步的信号波形。
配备了一个能够显示测试状态信息的液晶显示屏。
每台设备提供10个监测连接来读取模拟输入和输出信号,前面板上还有多个操作按键。
通过内置的独立数字I/O和RS485串行端口可以连接到其他硬件。
有一个紧急中止按钮可以在危急情况下中断测试。
简洁方便的网络连接以太网连接方式使得Spider-81在物理距离上可以与PC机离开较远,这种分布式的结构方式大大减少了噪声和系统中的电子干扰。
通过网络一台PC机可以监视和控制多台控制器。
由于控制过程和数据记录都在控制器内部执行,网络连接方式并不会影响控制性能。
通过无线网络路由器,PC还可以方便地采用WiFi方式连接远程的Spider设备。
多模块间的时间同步技术Spider-81采用了IEEE1588时间同步技术,在同一个局域网上的Spider 模块可以达到100ns的时间同步精度,即可以保证20KHz分析频宽下,通道间相位误差不大于±1度。
采用这一技术和高速以太网使得分布于网络上的模块,可以象一台集中式设备一样进行操作。
黑匣子模式:脱离PC工作Spider-81可以脱离PC机,以黑匣子模式进行工作。