基于毫米波雷达的车辆障碍物检测算法
基于毫米波雷达的舱内儿童遗留检测系统设计和验证

AUTOMOBILE DESIGN | 汽车设计基于毫米波雷达的舱内儿童遗留检测系统设计和验证祁淼盐城工业职业技术学院 江苏省盐城市 224005摘 要: 为了保护儿童避免被单独遗留在舱内,提出了基于毫米波雷达的传感器的检测方法。
本方法采集毫米波多普勒效应产生的时域和频域信息,在LC-KSVD算法中加入主成分分析和随机森林的降维方法提取特征,对特征最组合。
将组合的特征用SVM做分类,区分出存在和不存在儿童的场景。
实验部分根据用车习惯,收集设计了正样本的采集和负样本的采集。
实验表明,与同类的研究相比,本方法有更好的环境适应性可以避免相机等传统方法的局限性。
关键词:毫米波雷达 LC-KSVD算法 儿童检测 SVM分类1 前言汽车是许多家庭的标配,最近几年车辆设计的趋势之一是大天窗装在越来越多的车型上,2022年销量前十的车型[1]中除了五菱宏光MINIEV外都配有天窗,其中半数配置了全景天窗。
如果车辆暴露在阳光下,更多的热量通过天窗传递到舱内,在密闭环境中热量聚集使舱内温度快速上升。
幼儿被遗留在无人看管的车汽车里几分钟可能导致中暑和死亡。
大多数父母相信自己永远不会忘记坐在后座上的孩子。
现实情况是在过去的15年中美国有1000名儿童在车上因为过热去世,其中超过88%的幼儿小于3个月[2]。
常见的活体检测手段为视觉,文强[3]等人通过图像的几何形态学关系区分成年人和儿童(<6岁)的脸部特征。
公妍苏[4]等人利用树莓派作为计算平台开发基于Adaptive Boosting的儿童车内遗留检测系统。
但是,大多数婴儿座椅会配置遮阳帘,导致婴儿大多数特征无法被摄像头捕捉,造成漏报。
而且舱内过多的布置摄像头也会引起用户的反感。
董启迪[5]等人读取车上压力传感器的数值推测大人和孩子,结合车门开关等信息实现遗留检测。
0-6岁的孩子成长快,体重分布区间规律性不强,存在较大的误报风险。
本文采用基于毫米波雷达的技术方案,利用多普勒效应检测车内的运动情况,通过空间定位过滤车外的和非成员区间的运动,利用人体运动时频过滤出人体的运动。
现代汽车的四种测距方法
现代汽车的四种测距方法现代汽车的四种测距方法随着科技的发展,现代汽车采用了多种高级驾驶辅助系统(ADAS)来提高行车安全性。
其中一个重要的功能是测距,以确保车辆与前方障碍物的安全距离。
以下是现代汽车常用的四种测距方法:1. 毫米波雷达(MMW)测距:毫米波雷达是一种使用毫米波频段进行测距的无线电技术。
它能够发送高频的电磁波,并通过接收返回的波来测量车辆与前方物体的距离。
毫米波雷达具有高精度和快速响应的特点,可以在各种天气条件下工作,包括雨雪等恶劣环境。
2. 激光雷达(LiDAR)测距:激光雷达是一种使用激光束来测距的技术。
它通过发射脉冲激光并记录其返回的时间来计算车辆与前方物体之间的距离。
激光雷达具有高分辨率和精确度,可以提供更准确的距离测量结果。
然而,激光雷达对于恶劣天气条件下的工作效果较差。
3. 立体视觉(Stereo Vision)测距:立体视觉利用车辆上的多个摄像头来模拟人眼的视觉系统。
通过将两个或多个图像进行比较,系统可以计算出物体与车辆之间的距离。
立体视觉可以提供高分辨率的深度图像,但对光线和环境条件要求较高。
4. 超声波测距:超声波测距系统使用车辆上的超声波传感器来发送和接收超声波信号。
这种技术通过测量信号的时间差来计算车辆与前方物体之间的距离。
超声波测距对于低速行驶和近距离障碍物检测非常有效,但在高速行驶或远距离检测方面可能受到限制。
这些测距方法通常结合使用,以提供更准确和可靠的测距结果。
它们在现代汽车的智能驾驶辅助系统中起着关键作用,帮助驾驶员识别和避免潜在的碰撞风险,提高行车安全性。
随着技术的不断发展,我们可以期待更先进和精确的测距技术在未来的汽车中的应用。
无人机导航中的障碍物检测技术
无人机导航中的障碍物检测技术在当今科技飞速发展的时代,无人机的应用越来越广泛,从航拍、物流配送,到农业植保、抢险救援等领域,无人机都发挥着重要作用。
然而,要确保无人机在复杂的环境中安全、高效地飞行,障碍物检测技术就显得至关重要。
无人机在飞行过程中,可能会遇到各种各样的障碍物,如建筑物、树木、电线杆、电线等。
如果不能及时准确地检测到这些障碍物并采取相应的规避措施,就可能导致无人机碰撞、坠毁,造成财产损失甚至危及人员安全。
因此,障碍物检测技术是无人机导航系统的关键组成部分。
目前,用于无人机导航中的障碍物检测技术主要可以分为两大类:基于传感器的检测技术和基于视觉的检测技术。
基于传感器的检测技术主要包括激光雷达、毫米波雷达和超声波传感器等。
激光雷达通过发射激光束并测量反射光的时间和强度来获取周围环境的距离信息,具有高精度、高分辨率和长探测距离的优点。
毫米波雷达则利用毫米波频段的电磁波来检测障碍物,能够在恶劣天气条件下工作,具有较好的穿透能力。
超声波传感器则是通过发射超声波并接收回波来测量距离,成本较低,但探测距离和精度相对有限。
这些传感器各有优缺点。
激光雷达虽然精度高,但成本较高,且在某些环境中(如雨中、雾中)可能受到干扰。
毫米波雷达能够适应恶劣天气,但分辨率相对较低。
超声波传感器成本低,但适用范围较窄。
因此,在实际应用中,往往会根据具体需求和使用场景,选择一种或多种传感器组合使用,以提高障碍物检测的准确性和可靠性。
基于视觉的检测技术则是利用摄像头获取周围环境的图像信息,然后通过图像处理和分析算法来检测障碍物。
常见的视觉检测方法包括单目视觉、双目视觉和深度相机等。
单目视觉是指使用单个摄像头进行障碍物检测。
这种方法通常基于图像中的纹理、颜色、形状等特征来判断障碍物的存在和位置。
然而,单目视觉只能提供二维信息,难以准确获取障碍物的距离。
双目视觉则通过两个摄像头模拟人眼的视觉原理,获取物体的深度信息,从而实现障碍物的检测和距离测量。
基于毫米波雷达的汽车开门防撞系统
基于毫米波雷达的汽车开门防撞系统基于毫米波雷达的汽车开门防撞系统随着汽车智能化的快速发展,汽车开门防撞系统作为一项重要的安全功能得到了越来越多车辆的采用。
其中,基于毫米波雷达的汽车开门防撞系统以其高精度、大范围和快速响应等特点,成为目前最为先进的技术之一。
汽车开门防撞系统的重要性不容忽视。
目前,汽车事故中很大一部分是由于开车门时发生的碰撞造成的。
特别是在繁忙的城市街道、停车场等地方,驾驶员与其他行人、自行车或其他车辆的接触频率较高。
传统的开门方式主要依赖人眼和车窗的视野来判断周围环境,但这并不能保证百分之百的安全。
因此,开发一种可靠的汽车开门防撞系统势在必行。
毫米波雷达是一种利用毫米波频段进行无线通信和探测的技术。
相比于红外线和超声波等传统的车辆探测技术,毫米波雷达具有更长的探测距离、更高的分辨率和更强的抗干扰能力。
这使得它成为汽车开门防撞系统的理想选择。
基于毫米波雷达的汽车开门防撞系统主要由毫米波雷达传感器、控制器和警示装置组成。
毫米波雷达传感器作为系统的核心部件,可以实时监测车辆周围的环境状况,包括行人、车辆和障碍物等。
同时,它还可以识别这些目标物体的运动速度和方向,为后续的决策提供基础数据。
控制器则负责接收传感器的数据,并通过算法进行数据处理和分析,以判断是否存在开门碰撞的危险。
如果存在危险,警示装置将发出声音或闪光等信号,提醒驾驶员注意,并确保开门操作的安全。
基于毫米波雷达的汽车开门防撞系统具有许多优点。
首先,它可以实时、准确地监测车辆周围的环境,无论天气条件如何,都能够正常工作。
其次,毫米波雷达具有高分辨率和强大的抗干扰能力,可以有效地识别出小型、低速运动的目标物体,避免误报和漏报的情况发生。
此外,系统的响应速度快,可以在驾驶员开门之前及时发出警报,提供更多时间做出安全决策。
最重要的是,基于毫米波雷达的汽车开门防撞系统可以在各种复杂的交通环境中工作,为驾驶员和乘客提供全方位的安全保障。
毫米波雷达测量原理

毫米波雷达测量原理一、什么是毫米波雷达毫米波雷达是一种利用毫米波进行测量和探测的雷达系统。
毫米波指的是波长在1毫米至10毫米之间的电磁波。
相比于传统的雷达系统,毫米波雷达具有更高的频率和更短的波长,能够提供更高的分辨率和更精确的测量结果。
二、毫米波雷达测量原理毫米波雷达的测量原理基于电磁波的反射和回波信号的接收。
其工作流程可以简单地分为发射、接收和信号处理三个步骤。
1. 发射毫米波雷达系统通过发射器产生并发射毫米波信号。
这些信号具有特定的频率和波长,可以穿透大气中的干扰,并在目标物体上发生反射。
2. 接收当发射的毫米波信号遇到目标物体时,一部分信号会被目标物体吸收,一部分信号会被目标物体反射回来。
毫米波雷达系统的接收器会接收到这些反射回来的信号。
3. 信号处理接收到的信号经过放大、滤波等处理后,会被送入信号处理单元进行处理和分析。
信号处理单元会提取出目标物体的特征信息,如距离、速度、方向等,并进行相应的计算和判断。
三、毫米波雷达的应用毫米波雷达具有广泛的应用领域,包括但不限于以下几个方面:1. 无人驾驶毫米波雷达在无人驾驶领域中扮演着重要的角色。
通过利用毫米波雷达进行环境感知和障碍物检测,无人驾驶车辆可以实时获取周围环境的信息,并做出相应的决策和行动。
2. 安防监控毫米波雷达在安防监控领域中也有广泛的应用。
通过毫米波雷达可以实现对人体和物体的实时检测和跟踪,提高安防监控系统的准确性和可靠性。
3. 医疗诊断毫米波雷达在医疗诊断领域中有着潜在的应用。
通过利用毫米波雷达进行人体组织的扫描和成像,可以实现对肿瘤、血管等病变的早期检测和诊断。
4. 气象预报毫米波雷达在气象预报领域中也有重要的应用。
通过利用毫米波雷达可以实时观测大气中的降水、云层等信息,提高气象预报的准确性和精度。
四、毫米波雷达的优势和挑战毫米波雷达相比于传统的雷达系统具有一些明显的优势,但也面临一些挑战。
1. 优势•高分辨率:毫米波雷达具有较高的频率和较短的波长,能够提供更高的分辨率,可以实现对小目标物体的精确测量和检测。
二维毫米波雷达简单c语言算法

二维毫米波雷达简单c语言算法二维毫米波雷达是一种常见的测距设备,它广泛应用于车辆自动驾驶、智能交通等领域。
本文将介绍一个简单的C语言算法,用于处理二维毫米波雷达的数据。
首先,我们需要了解二维毫米波雷达的原理。
毫米波雷达通过发送高频电磁波,然后接收反射回来的信号,从而计算出目标物体的距离、速度和角度等信息。
在二维毫米波雷达中,我们可以将这些信息表示为一个二维数组。
接下来,我们来看一下C语言中如何处理这些数据。
首先,我们需要定义一个二维数组,来存储雷达返回的数据。
假设我们的雷达测量范围为100米x100米,数据分辨率为1米x1米,那么我们可以定义一个100x100的数组,如下所示:int radarData[100][100];接着,我们需要从雷达中获取数据,并将其存储到数组中。
假设我们已经实现了一个名为“getRadarData()”的函数,它可以从雷达中获取一个数据点的距离值。
那么,我们可以使用一个双重循环来获取所有数据点的距离值,并将其存储到数组中,如下所示:for(int i=0;i<100;i++){for(int j=0;j<100;j++){radarData[i][j]=getRadarData();}}在上面的代码中,我们使用了两个循环来遍历整个数组,并调用“getRadarData()”函数来获取每个数据点的距离值,并将其存储到数组中。
最后,我们可以使用数组中的数据来进行各种计算,比如检测是否有障碍物、计算车辆的速度等。
这里只是一个简单的例子,实际应用中可能需要更复杂的算法来处理数据。
总之,二维毫米波雷达是一种重要的测距设备,在实现自动驾驶和智能交通等领域发挥了重要作用。
本文介绍了一个简单的C语言算法,用于处理二维毫米波雷达的数据,希望对读者有所帮助。
4d毫米波雷达 俯仰角 原理

4D毫米波雷达俯仰角原理1.简介本文将介绍4D毫米波雷达的俯仰角原理。
首先会对毫米波雷达的基本原理进行简单说明,然后重点介绍俯仰角在4D毫米波雷达中的应用以及测量方法。
通过阅读本文,您将对4D毫米波雷达的俯仰角有一个清晰的理解。
2.毫米波雷达基本原理毫米波雷达是一种通过发射和接收毫米波信号来实现目标检测与测距的设备。
它工作在毫米波频段(频率通常在30G Hz到300GHz之间),具有较高的分辨率和穿透力。
毫米波雷达通过发射一个短脉冲的毫米波信号,并接收目标反射回来的信号来实现对目标的探测和测距。
3.俯仰角的概念俯仰角是指雷达天线与地面之间的夹角,即天线的仰角。
在4D毫米波雷达中,俯仰角是指雷达天线上下旋转的角度。
通过调整俯仰角,可以实现对不同高度目标的检测和跟踪。
4.俯仰角的应用4D毫米波雷达广泛应用于自动驾驶、智能交通和无人驾驶等领域。
在自动驾驶中,4D毫米波雷达可以通过调整俯仰角实现对行人、车辆和障碍物的检测和跟踪,从而实现智能避障和自动驾驶功能。
5.俯仰角的测量方法为了准确测量4D毫米波雷达的俯仰角,通常采用以下方法:-惯性导航系统:通过使用加速度计和陀螺仪等传感器,可以实时测量雷达天线的俯仰角。
-光学传感器:使用光学传感器配合计算机视觉算法,可以检测雷达天线的位置和姿态,从而计算出俯仰角。
-电子水平仪:安装在雷达天线上的电子水平仪可以直接测量雷达天线的俯仰角。
6.俯仰角的控制与调整在4D毫米波雷达系统中,通过调整俯仰角可以实现目标检测的精确性和灵活性。
通过对目标进行连续跟踪,并实时调整俯仰角,可以最大程度地优化雷达的性能。
7.结论4D毫米波雷达的俯仰角在自动驾驶、智能交通和无人驾驶等领域发挥着重要作用。
本文对俯仰角的原理进行了详细介绍,并介绍了俯仰角的应用和测量方法。
通过合理控制和调整俯仰角,可以提高4D毫米波雷达的目标检测和跟踪性能,使其在自动驾驶等领域发挥更大的作用。
以上就是关于4D毫米波雷达俯仰角原理的详细介绍。
障碍物探测系统原理及在轨道交通行业的应用
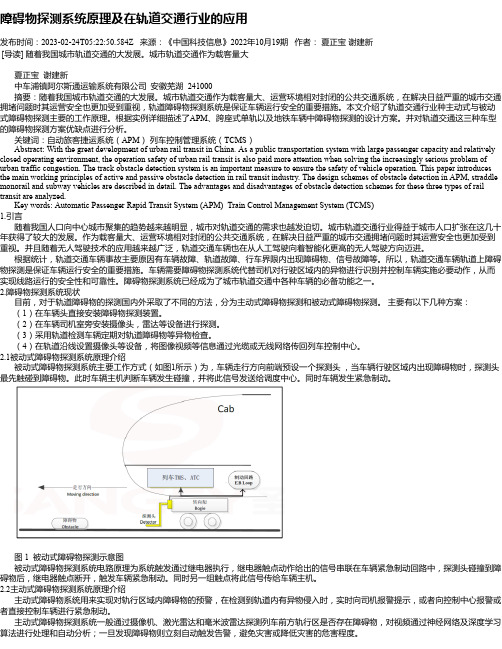
障碍物探测系统原理及在轨道交通行业的应用发布时间:2023-02-24T05:22:50.584Z 来源:《中国科技信息》2022年10月19期作者:夏正宝谢建新[导读] 随着我国城市轨道交通的大发展。
城市轨道交通作为载客量大夏正宝谢建新中车浦镇阿尔斯通运输系统有限公司安徽芜湖 241000摘要:随着我国城市轨道交通的大发展。
城市轨道交通作为载客量大、运营环境相对封闭的公共交通系统,在解决日益严重的城市交通拥堵问题时其运营安全也更加受到重视,轨道障碍物探测系统是保证车辆运行安全的重要措施。
本文介绍了轨道交通行业种主动式与被动式障碍物探测主要的工作原理。
根据实例详细描述了APM、跨座式单轨以及地铁车辆中障碍物探测的设计方案。
并对轨道交通这三种车型的障碍物探测方案优缺点进行分析。
关键词:自动旅客捷运系统(APM)列车控制管理系统(TCMS)Abstract: With the great development of urban rail transit in China. As a public transportation system with large passenger capacity and relatively closed operating environment, the operation safety of urban rail transit is also paid more attention when solving the increasingly serious problem of urban traffic congestion. The track obstacle detection system is an important measure to ensure the safety of vehicle operation. This paper introduces the main working principles of active and passive obstacle detection in rail transit industry. The design schemes of obstacle detection in APM, straddle monorail and subway vehicles are described in detail. The advantages and disadvantages of obstacle detection schemes for these three types of rail transit are analyzed.Key words: Automatic Passenger Rapid Transit System (APM) Train Control Management System (TCMS)1.引言随着我国人口向中心城市聚集的趋势越来越明显,城市对轨道交通的需求也越发迫切。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于毫米波雷达的车辆障碍物检测算法
随着汽车制造技术的发展,车辆安全已经成为了关注的焦点。
其中,车辆障碍
物检测是重要的安全问题。
基于毫米波雷达的车辆障碍物检测算法是目前比较成熟、使用广泛的技术。
本文将从以下几个方面介绍这种技术。
## 毫米波雷达的概念和基本原理
毫米波雷达是一种通过使用毫米波进行检测的雷达。
毫米波是一种电磁波,波
长在1毫米到10毫米之间,是介于微波和红外线之间的电磁波。
因为毫米波具有
高频和短波长的特点,所以在探测精度和抗干扰性方面具有一定的优势。
而毫米波雷达则是通过发射和接收毫米波信号来检测车辆前方的障碍物。
毫米波雷达的基本工作原理是:雷达发射毫米波信号,这个信号会穿过透明的
物体(比如空气)并射向障碍物。
障碍物会将一部分射向它的波反射回来,射回雷达。
雷达接收到反射回来的波之后,利用回波时间和波速计算出障碍物距离和速度。
## 基于毫米波雷达的车辆障碍物检测算法
基于毫米波雷达的车辆障碍物检测算法的基本思路是:通过毫米波雷达获取车
辆前方的障碍物信息,再根据这些信息进行车辆自动驾驶、制动等操作。
具体来说,车辆障碍物检测算法一般包括以下步骤:
### 步骤1:雷达信号处理
利用数字信号处理技术对接收到的毫米波雷达信号进行预处理。
### 步骤2:目标检测
在雷达信号处理后,需要对信号进行目标检测,识别出障碍物。
这里常用的方
法有微分、二阶微分、CFAR等。
### 步骤3:目标跟踪
目标检测完成后,需要对障碍物进行跟踪。
常用的跟踪算法包括Kalman 滤波、扩展 Kalman 滤波等。
### 步骤4:目标分类与参数提取
对于检测到的障碍物,需要进行分类,并提取相关的参数。
常用的目标分类算
法有支持向量机(SVM)、人工神经网络等。
参数包括障碍物的位置、速度、大小、形状等信息。
### 步骤5:决策与控制
在所有目标的分类与参数提取后,根据车辆当前情况,如速度、加速度、车辆
倾角、转向角等,通过决策算法进行决策和打分,最后进行车辆控制,如制动、转向等。
## 基于毫米波雷达的车辆障碍物检测算法的优势和不足
基于毫米波雷达的车辆障碍物检测算法具有以下优势:
- 毫米波雷达具有高精度和高可靠性,可以检测到障碍物的位置、速度和形状
等信息。
- 毫米波雷达不受外界干扰,比如光照、雨雪等天气影响。
- 基于毫米波雷达的检测算法可以应用于夜间和低能见度情况下。
但是,这种技术也存在一些不足之处:
- 毫米波雷达价格比较昂贵。
- 毫米波雷达比较大,需要耗费更多板载空间,不利于轻量化设计。
- 毫米波雷达在雨雪、雾霾等情况下会出现性能下降。
## 结论
基于毫米波雷达的车辆障碍物检测算法已经被广泛应用于自动驾驶汽车、无人机等领域。
未来,毫米波雷达技术将继续发展,其应用场景也将进一步拓展。