CAN网络控制系统的网络时延分析与检测
时延分析报告

时延分析报告简介时延(Latency)是指消息从发送者发送到接收者接收所需的时间。
对于实时通信系统和网络应用而言,时延是一个重要的性能指标。
时延分析报告旨在通过分析系统的时延情况,评估系统的性能,并提出改进建议。
方法为了对系统的时延进行分析,我们采用了以下方法:1.选择采样点:我们选择了系统中的关键节点,包括发送者、网络传输过程中的路由节点以及接收者,对这些节点进行时延的测量。
2.测量时延:我们使用网络分析工具对每个节点的时延进行测量。
具体的测量方法包括ping命令和traceroute命令。
3.数据处理:我们将测量得到的时延数据进行整理和分析,计算平均时延、最大时延以及时延的分布情况。
结果根据我们的测量和分析,我们得到了以下关于系统时延的结果:1.平均时延:系统的平均时延为50ms。
这表明消息从发送到接收平均需要50ms的时间。
2.最大时延:系统的最大时延为200ms。
这表示在极端情况下,消息可能需要200ms才能到达接收端。
3.时延分布:大部分消息的时延集中在30ms到70ms之间,占总消息数的80%。
只有少量的消息的时延超过100ms。
分析根据上述结果,我们可以对系统的时延进行以下分析:1.性能评估:系统的平均时延为50ms,在实时通信系统中算是较好的性能表现。
最大时延为200ms,虽然有些高,但在一般情况下,用户不太可能遇到这样的延迟。
2.时延分布:大部分消息的时延在可接受范围内,只有少数消息的时延超过100ms。
可以考虑对这些异常消息进行单独处理,以提高用户体验。
建议基于上述分析,我们提出以下改进建议:1.优化网络:考虑增加网络带宽,减少网络拥堵,以降低时延。
2.负载均衡:在系统中引入负载均衡机制,将消息均匀分布到不同的服务器上,以减少服务器的负载,提高系统的响应速度。
3.异常处理:针对超过100ms时延的消息,可以采用加速处理的手段,减少用户等待时间。
总结通过对系统时延的分析,我们评估了系统的性能并提出了改进建议。
基于CAN的某水下航行器内部网络时延统计方法研究
Байду номын сангаас
关键词 : 网络 延 时 ; 制 器 局 域 网 ; 息 传 输 控 信
中图分类号 : P 9 ;P 7 T 33T23
文献标志码 : A
Ti e d l y a l ss 0 nt r 0 ne t0 t r i Un a e de s a Ve c e m e a na y i f i e c n c i n ne wo k n m nn d Un r e hi l s
摘
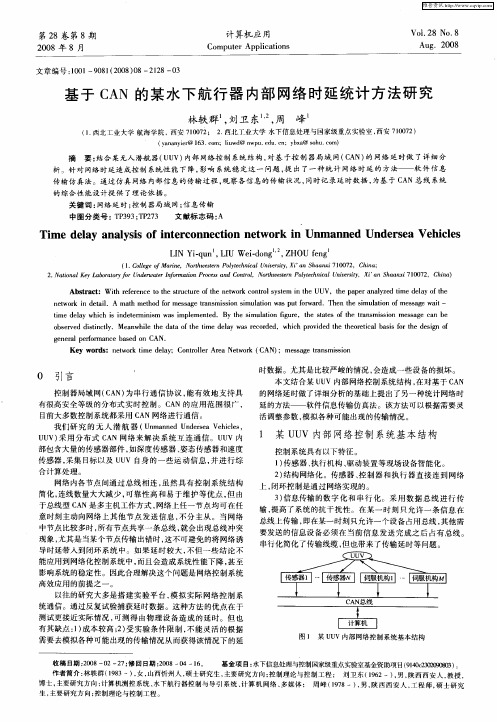
要 : 合 某无 人 潜 航 器( U 内部 网络 控 制 系统 结 构 , 基 于控 制 器局 域 网 ( A 的 网 络 延 时做 了详 细 分 结 U V) 对 C N)
析 。针 对 网 络 时 延造 成控 制 系统性 能 下 降 , 响 系统 稳 定 这 一 问 题 , 出 了 一 种 统 计 网络 时 延 的 方 法— — 软 件 信 息 影 提 传 输仿 真 法 。 通 过仿 真 网络 内部 信 息 的 传 输 过 程 , 察 各 信 息 的 传 输 状 况 , 时记 录延 时数 据 , 基 于 C N 总 线 系统 观 同 为 A
Ke o d :n tok t ed ly o t l r r ew r C N ;m sa et n m sin y w r s e r m ea ;C n o e e N t ok( A ) es g a s i o w i rl A a r s
0 引 言
控制器局域 网( A 为 串行通 信协议 , 有效地 支持具 C N) 能 有 很 高 安 全 等 级 的分 布 式 实 时 控 制 。C N 的应 用 范 围 很 广 , A 目前大多数控制 系统都采用 C N网络进行通信。 A 我们研 究 的 无 人潜 航 器 ( n ne nesa V hc s U mand U dre e ie , l U V) 用分 布式 C N网络 来解决 系统 互连通 信。U V内 U 采 A U 部包含大量 的传感器部件 , 如深 度传感 器 、 姿态传感器 和速 度 传感器 , 采集 目标 以及 U V 自身 的一 些运 动信息 , 进行综 U 并 合计算处理 。 网络 内各节点 间通过 总线相 连 , 然具有控 制 系统结 构 虽
时延的确定方法

时延的确定方法
时延是指信息传输过程中所花费的时间,是网络性能的重要指标之一。
在网络工程和通信领域中,时延的确定方法一直是研究的重点之一。
目前,时延的确定方法主要有以下几种:
1. 采用Ping命令测量时延:Ping是一种常用的网络诊断工具,可以用来测试网络的连通性和响应时间。
通过向目标主机发送特定格式的数据包,并测量返回的响应时间,可以计算出数据包的往返时延。
2. 使用网络性能分析工具测量时延:网络性能分析工具可以通
过抓取网络数据包,分析网络流量,来测量网络性能指标,包括时延、带宽、丢包率等。
常用的网络性能分析工具有Wireshark、NetFlow 等。
3. 基于模拟仿真的方法确定时延:模拟仿真是一种常用的网络
性能分析方法,可以通过建立网络模型,模拟网络的运行过程,来评估网络性能指标。
在网络模型中,可以加入时延的模拟,来确定网络的时延。
4. 基于实验测量的方法确定时延:实验测量是一种直接测量网
络性能指标的方法,可以通过搭建实验环境,对网络进行实际测试,来确定网络的时延。
常用的实验测量方法有基于网络测试仪器的测量、基于用户体验的测量等。
综上所述,时延的确定方法有多种,可以选择适合自己的方法进行测量。
在实际工程中,需要综合考虑不同方法的优劣,选择合适的方法进行网络性能分析和优化。
网络控制系统的时延补偿与控制器设计的开题报告

网络控制系统的时延补偿与控制器设计的开题报告一、选题背景网络控制系统 (Networked Control System, NCS) 在工业自动化中得到了广泛应用,它通过传输控制系统的信号和信息,将控制器、执行器和被控对象之间的物理连接转变为逻辑连接,从而实现远程监控和自动控制。
然而,NCS 会受到网络通信时延的影响,导致控制系统性能受损,甚至系统不稳定。
因此,对网络控制系统时延问题的探究和解决,对于提高控制系统的性能和可靠性具有重要的意义。
二、选题内容本文将主要研究网络控制系统的时延问题,并在此基础上设计相应的控制器。
具体内容包括:1.网络控制系统时延的来源及其特点:分析 NCS 的特点和网络通信的原理,归纳出系统时延的主要来源及其特点。
2.时延补偿算法的研究:对常用的时延补偿算法,如状态反馈、输出反馈和预测控制等进行研究,探究其优缺点及适用范围。
3.网络控制系统的控制器设计:根据系统时延的特性,设计适用于NCS 的控制器,包括基于状态反馈的控制器、基于输出反馈的控制器和基于预测控制的控制器等。
4.仿真验证和实验分析:通过仿真和实验的方法,验证不同控制器的性能和稳定性,分析不同时延补偿算法和控制器的适用性和优劣。
三、研究意义网络控制系统作为一种新型控制系统技术,其应用前景广阔,对于提高生产效率和降低生产成本具有重要意义。
然而,网络通信时延问题一直是制约 NCS 发展的瓶颈,所以解决 NCS 的时延问题具有重要的实际意义。
本文将研究 NCS 的时延问题,并设计相应的控制器,能够提高NCS 的控制性能和系统稳定性,对于推动 NCS 技术的发展具有积极的作用。
四、研究方法本文将采用文献研究和仿真实验相结合的方法,具体研究步骤如下:1.收集文献,梳理时延补偿算法的基本原理和控制器设计的思路。
2.建立 NCS 的数学模型,仿真验证不同时延补偿算法和控制器的性能和稳定性。
3.在仿真结果的基础上,设计实验方案,对所设计的控制器在实际系统中进行验证。
网络控制系统的时延补偿与控制器设计
网络控制系统的时延补偿与控制器设计The Standardization Office was revised on the afternoon of December 13, 2020摘要随着计算机技术的发展,控制系统与网络通信系统的集成成为控制网络技术研究的热点,为此提出了网络控制系统(NCS)。
本文介绍了网络控制系统的工业背景和研究现状,重点介绍了网络时延问题的研究进展。
分析了网络控制系统的时延产生原因及特性,根据采样时间的不同和驱动方式的不同进行了建模分析。
根据不同的模型分析了固定时延、随机时延的补偿控制器设计。
本文重点介绍了针对不确定时延采用Fuzzy-PID控制器的设计和仿真研究。
在最后,介绍了一种Matlab环境下的实时控制系统仿真工具箱Truetime,给出了具有时延特征的网络控制系统的控制仿真结果。
关键词:网络控制系统,网络时延,时延补偿,Fuzzy-PID控制器ABSTRACTWith the development of computer technology, some considerable attentions have been directed to the integrated control systems and network communication control system. So Network Control System(NCS)is proposed. In this thesis ,the paper introduces the engineering background and research achievements, and focuses on the progress of network delay. The causes and the characteristic of network-induced delay are analyzed. According to the different of sampling time and drive way, model is built and analyzed. Depending on the different models, the controller with the compensation about the fixed time delay and random delay controller are designed. This paper focuses on using Fuzzy - PID controller against uncertainty delay to design and simulation testing. In conclusion,Simulink toolbox,named by Truetime,based on Matlab has been introduced in this paper. And the characteristics of the NCS simulation results are given.Liu Jian (Control Theory and Control Engineering)Directed by prof. Ma YongguangKEY WORDS:Networked control systems, Network-induced delay, Delay compensation, Fuzzy-PID controller目录中文摘要英文摘要第一章绪论 ...................................................................... 错误!未定义书签。
CAN总线系列讲座第八讲——CAN网络延时与波特率选择
CAN总线系列讲座第八讲——CAN网络延时与波特率选择在CAN系统中,系统的实时性影响的因素主要有两种:一是网络的延时;二是总线的通讯速率。
因此,在构建网络时必须对于两个参数进行确定。
当总线的通讯速率较快时,报文传输的时间相对较短。
但是,较高的通讯速率会导致传输距离缩短。
因此这两个参数的确定必须考虑整个网络的范围。
1、网络延时由于在串行总线系统中所有的节点共用总线介质,因此分布式系统的控制通常会因为信息的传输而导致额外的延迟时间。
对于带有确定性总线访问的通信系统,有效的延迟时间是由最大令牌环延迟(令牌传递系统)或周期时间(主-从系统)决定的。
尽管CAN总线是基于分散的、随机的总线访问方式(因为CAN总线的无损仲裁以及多主的特性),但是它可以保证与确定性总线访问的系统具有同等的实时性。
限制高优先级报文连续访问总线的一个简单方法是在一个适当的指定时间间隔(“最小禁止时间”)之后,只允许继续传输同一个报文。
在这段时间间隔内可以传输低优先级的报文。
在实际应用中,限制了保证最小反应时间的报文数量。
CAN系统中所有报文的数量可以分成高优先级报文和低优先级报文数。
对于高优先级报文,使用额外的机制确保它们只能在指定的“禁止时间间隔”之后重新占用总线。
这样虽然不会影响高优先级报文的最大延迟时间,但是会降低高优先级报文的传输速率。
下面举例说明对CAN系统的最大可能响应时间的估计,该时间是在最坏情况下一个报文的最大可能延迟时间。
最坏的情况是所有高优先级报文都打算同时进行传输数据。
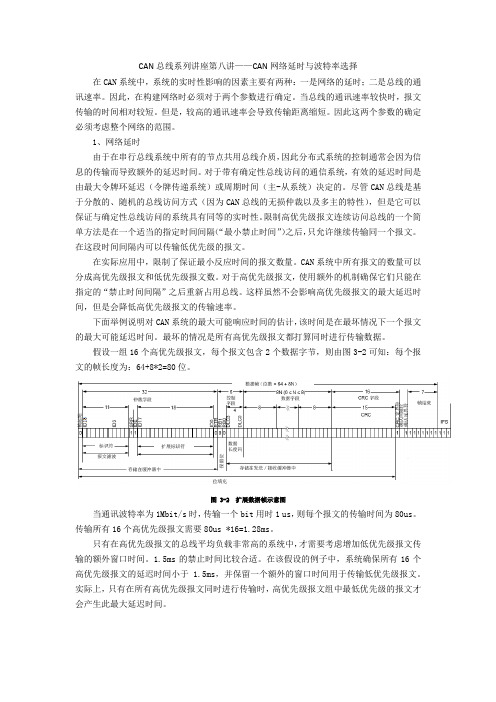
假设一组16个高优先级报文,每个报文包含2个数据字节,则由图3-2可知:每个报文的帧长度为:64+8*2=80位。
图 3-2 扩展数据帧示意图当通讯波特率为1Mbit/s时,传输一个bit用时1 us,则每个报文的传输时间为80us。
传输所有16个高优先级报文需要80us *16=1.28ms。
只有在高优先级报文的总线平均负载非常高的系统中,才需要考虑增加低优先级报文传输的额外窗口时间。
CAN总线系统测试技术简介
CAN总线系统测试技术简介引言随着汽车电子技术的发展,汽车上所用的电控单元不断增多,电控单元之间信息交换的需求促进了车用总线技术的发展。
CAN总线即控制器局域网总线,由Bosch公司于1981年制定,主要目的为用作汽车的高速动力总线、中速车身总线等。
由于CAN总线具有可靠性高、实时性好、成本合理等优点,逐渐被广泛应用于其他领域中,例如船舶、航天、工业测控、工业自动化、电力系统、楼宇监控等,成为了广泛使用的现场总线之一。
基于CAN总线协议,还发展出CANopen、J1939、DeviceNet等多种上层总线协议。
CAN是一种开放式多主站线性结构的总线,使用双绞线作为连接介质连接所有节点,最高传输速率为1Mbit/s。
CAN总线使用载波侦听多路访问/冲突检测(CSMA/CD)技术这种非破坏性的总线仲裁方式,避免多个节点同时开始发送消息而造成总线冲突,保证优先级高的报文能够优先发送而不需要额外的时间开销。
CAN协议不对节点进行地址规定,而是使用报文的标识符来指定报文的优先级以及报文的内容。
同时,CAN总线协议提供了完善的错误检测与错误处理机制,包括了CRC检测、错误报文自动重发、错误状态判断、临时错误自动恢复、永久错误自动错误节点等措施,从而很好的保证了系统数据一致性。
图1 系统开发流程1, CAN总线开发流程随着CAN总线技术应用在国内各个行业中广泛使用,CAN总线开发流程及开发方法也日益成为关注的重点。
目前,基于开发-验证思想的V型开发流程被广泛用于CAN总线的开发过程中,如图1所示。
OEM厂商首先定义CAN总线系统需求,并进行系统构架设计,然后由供应商根据OEM厂商提出的需求,分析节点ECU的需求并进行节点设计,再进行软硬件实现以及节点ECU集成,最后对ECU进行测试验证。
供应商将所设计的节点ECU提供给OEM厂商,由OEM厂商进行CAN总线系统的集成,并对系统进行确认,才能形成最终的产品。
在V开发流程中,测试始终贯彻着整个开发流程,以在开发过程中能尽早的发现设计问题。
网络化控制系统的几个主要问题及其分析
而被要求重发,如果该节点的数据在规定的 现场控制的网络控制系统来说造价太高, 点配置。
重发时间内仍然没有成功发送数据,则该数 包括OSI系统所有各层的总开销,对于网络
采用上述几个基本的降低网络负载的
据包被丢弃。这些现象都可视为数据包丢 控制系统的应用来说同样显得太高。
方法,将有利于控制系统的实时性要求,提
产生影响。这就需要通过调度来协调控制 (Message Collision)、信息吞吐量、分组尺寸
(作者单位 辽宁省沈阳职业技
网络。调度分为静态和动态调度。静态调度 (Packet Size)、网络利用率和一些确定界等。 术学院机械装备系学办)
新课程学习 159
过程中,传感器—控制器和控制器—执行器 的基本问题外,控制系统部件的工作模式, 而只有三层。这样既减少了无效数据的传
的时延,记为τsc和τca,合称为网络诱导时 时钟同步等问题始终贯穿于网络控制系统 输,也减少了编码解码的时间,从而提高了
延。而在大多数情况下,网络诱导时延是时 的分析、设计以及实现过程中,有时也会影 实时性。
失。闭环控制系统虽然对系统中结构和参数
4.控制网络通常可以选择低成本的桥 高NCS的控制性能。
的变化具有一定的鲁棒性,但不可避免地造 接器、路由选择器等实现和其它开放式网
参考文献:
成性能的下降,严重地将导致系统失稳,需 络系统的连接,这一点非常重要。
[1]邢江,关治洪.网络化控制系统的研
要寻找行之有效的解决方法。
关键词:网络化控制;网络延迟;通信约束;数据包丢失;信息调度
一、网络化控制系统研究目前存在的 指在系统运行前就规定了传输顺序,其传 对于控制系统,理想的控制网络至少必须满
主要问题
CAN网络实时性分析及改进
CAN网络实时性分析及改进袁远;李红信【摘要】随着CAN总线控制网络的复杂化,单段网络上的控制节点数目增多而且网络带宽利用率要求日益提高,这使得总线上优先级属性低的数据传输延时增加.提出"取模增加"法动态改变站点优先级,使优先级较低的站点可以动态地提高优先级,通过动态改变各站点优先级,保证各站点有均等机会获得总线控制权,实现数据实时传输.与TTCAN(时间触发CAN)协议方式进行实验比较,得出了网络延时特征.在较大网络负载的情况下,对于事件型消息,采用动态优先级调度算法可以比CAN方式的网络传输延时降低10%,对于周期型消息,TTCAN方式比采用CAN方式降低网络传输延时20%.【期刊名称】《电子设计工程》【年(卷),期】2010(018)006【总页数】3页(P110-112)【关键词】CAN;实时性;动态优先级算法;时间触发CAN(TTCAN)【作者】袁远;李红信【作者单位】兰州大学,甘肃,兰州,730000;兰州大学,甘肃,兰州,730000【正文语种】中文【中图分类】TP336CAN(Controller Area Network)即控制局域网,由于本身所具有高性能、高可靠性等特点,被认为是几种最有前途的现场总线之一[1]。
CAN总线网络是基于事件触发机制的多主系统,其MAC层协议采用非破坏性逐位仲裁(CSMA/CA)技术[2],网络上的各个节点通过标识符域中的优先级大小竞争总线的使用权[3]。
本文从分析CAN总线标准协议入手,通过研究共享访问控制原理及TTCAN协议,提出了一种动态优先级调度算法,构建了网络延时分析平台,并与标准CAN网络时延及采用TTCAN协议网络时延进行比较,验证了此算法的有效性。
1 CAN实时性研究及改进衡量通信实时性的指标是通信的延迟时间,即从消息产生时刻到将消息帧中的有效数据提供给目标任务的时刻[4]。
1.1 动态优先级算法动态优先级是基于原有CAN事件触发协议的基础上,随着时间的推移动态调整各个站点的优先级的一类算法,相对于原有的固定优先级,它使每个站点都有相同的权力来享受总线的带宽,避免优先级较低的站点得不到总线占有权,保证网络数据传输的实时性。
网络时延分析与优化方法
网络时延分析与优化方法随着互联网和信息通信技术的发展,网络时延成为了一个重要的指标。
网络时延是指信息从发出端到接收端所需的时间。
较短的网络时延可以提高网络的响应速度,改善用户体验。
本文将介绍网络时延的概念、常见的时延问题以及优化方法。
一、网络时延的概念网络时延是指信息从一点传输到另一点所需的时间。
它主要由以下几个方面组成:1.发送时延(Transmission Delay):发送时延是指信息从发送器发送到传输介质上所需的时间。
它与数据的长度、数据传输速率等因素有关。
2.传播时延(Propagation Delay):传播时延是指信息在传输介质中传播所需的时间。
它与传输介质的物理特性以及传输距离有关,例如光纤的传播时延较短。
3.排队时延(Queueing Delay):在网络中,信息需要经过多个节点进行转发。
当网络流量较大时,节点上可能会有一些等待传输的信息,导致排队时延的增加。
4.处理时延(Processing Delay):处理时延是指信息在节点进行处理所需的时间。
它包括了数据包在节点缓冲区中等待处理的时间以及节点进行转发所需的时间。
二、网络时延的常见问题网络时延可能会导致以下问题:1.应用响应速度慢:当网络时延较大时,用户在使用网页、应用程序等时可能会感到卡顿,影响使用体验。
2.实时通信中的延迟:对于实时通信应用,如在线游戏、视频会议等,较大的时延会导致语音或视频的延迟,影响交流效果。
3.网络拥堵:当网络流量较大或网络设备负荷过重时,排队时延会增加,导致网络拥堵,影响信息传输效率。
三、网络时延的优化方法为了减小网络时延,提高网络的响应速度,可以采取以下优化方法:1.优化网络拓扑结构:合理设计网络的拓扑结构可以减小传播时延和排队时延。
例如,引入边缘计算、使用CDN等可以将数据资源更靠近用户,提高数据访问速度。
2.提高传输速率:使用更高的传输速率可以减少发送时延,提高信息传输效率。
例如,使用光纤替代传统的铜缆可以提高传输速率。