前馈式线性功率放大器的自适应控制
自适应控制的基本概念

2. 自适应控制提出 当不确定因素难以事先预知,又要设计满 意的控制系统,由此提出自适应控制思想。 自适应调节器就是期望修正自己的特性以 补偿过程和扰动的动力学变化。
四、自适应控制思想雏形
观测 运行指标 系统参数 再认识 系统 (不确定) 决策修正 控制器参数 控制器结构 控制作用
性能指标
2. 模型参考自适应控制系统 a. 线性模型跟随系统
参考模型给出 了期望闭环响 应特性
参考模型
es Gm 1 GcG p GcG p u s 1 GcG p G p G f
y p s GcG p GmG p G f u s 1 GcG p G p G f
二、控制问题的几种情况
1. 无扰动,系统模型确定
系统模型
属于确定性控制 可以采用开环控制 2. 有扰动,系统模型确定 属于随机控制 当扰动不确定采用闭环控制 扰动确定可以采用补偿控制 3. 可能有扰动,系统模型不确定
采用闭环控制? 扰动√ 系统模型不确定×
扰动
系统模型
扰动
系统模型
ym
模型跟随 调节器
e
yp
+
u
-
控制器
+
-
被控对象
已知被控对象的数学模型√ 未知被控对象的数学模型或变化×
b. 模型参考自适应控制系统
参考模型
+
-
e
u
- -
前馈调节器
被控对象
反馈调节器
参数调整 信号综合
自适应机构
美国Minorsky研制船舶驾驶伺服结构,提出PID控制(1922)
美国MIT的Vannevar Bush研制成大型模拟计算机 (1928)
前馈功率放大器电路原理图

前馈功率放大器电路原理图
目前,国内外有很多功放名机应用了前馈技术,诸如电流倾注式功放、ALA功放、双超线性功放等。
然而这些功放大都用分立元件装成,电路复杂、元件繁多,在缺少足够测量仪器的条件下,业余仿制并非易事。
本文设计制作的前馈功率放大器。
由于采用了功放驱动集成模块AP500A,不仅使整机电路大为简化,元件节省近一半,而且免去了差分对管选配和整机调试等许多麻烦,其效果是十分明显的。
电路原理:
调试方法:
元器件选择:。
自适应控制讲稿_7自适应逆控制
第八章 自适应逆控制——8.2
• 抖动信号迭加方法A(直接迭加)
抖动 δk
uk
Σ
对象输入 uk 对象 P(z)
yk
对象扰动 nk Σ 误差k
对象输出 zk
期望响应 Σ 信号
uk
自适应模型 ˆ Pk ( z )
ˆ yk
ˆ k P ( z )( uk k ) nk Pk ( z )( uk k ) ˆ ( P ( z ) Pk ( z ))( uk k ) nk
d (k ) x(k ) 其中,P 是输入信号和期望响应 d ( k ) x ( k 1) 之间的互相关向量: P E d ( k ) xk E d ( k ) x ( k L )
R 是输入信号的相关矩阵(对称正定)
x(k ) x(k ) x ( k ) x ( k 1) T R E xk xk E
T 2 ( k ) d 2 ( k ) 2 d ( k ) h T xk h T x k x k h 均方误差: 2 2
T T MSE E (k ) E d (k ) 2 E d (k ) xk h hT E xk xk h
E d 2 (k ) 2 PT h hT Rh
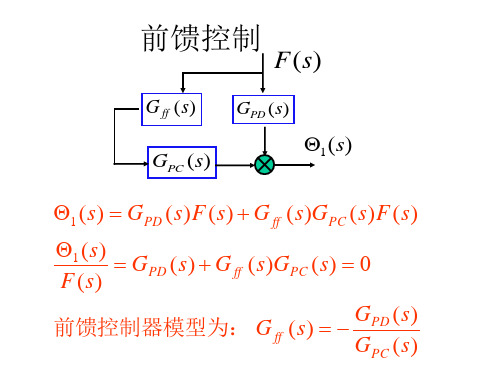
前馈控制
G ff (s)
F (s )
1 ( s)
GPD (s)
GPC (s)
1 ( s ) G PD ( s ) F ( s ) G ff ( s )G PC ( s ) F ( s ) 1 ( s ) G PD ( s ) G ff ( s )G PC ( s ) 0 F (s) G PD ( s ) 前馈控制器模型为: G ff ( s ) G PC ( s )
自适应控制系统的设计与实现

自适应控制系统的设计与实现自适应控制系统是一种能够自动调节参数以适应环境变化的控制系统,它在许多工业自动化和控制应用中得到广泛应用,具有高效、灵活、适应性强的特点。
本文将介绍自适应控制系统的设计与实现,包括传统的自适应控制方法、模型参考自适应控制方法和自适应控制器的实现。
一、传统的自适应控制方法传统的自适应控制方法是通过在线识别系统模型,然后根据误差信号来调整控制器的参数,以实现良好的控制效果。
通常有以下几种方法:1. 最小二乘法:通过对输入信号和输出信号的采样,建立系统的模型,并通过最小二乘法求解模型参数。
然后通过误差信号来调整控制器参数,以减小误差。
2. 神经网络方法:利用神经网络来建立系统模型,然后根据误差信号来训练网络参数,以实现自适应控制。
3. 递归最小二乘法:根据系统输出信号来逐步优化系统模型,递归地更新模型参数,并根据误差信号来调整控制器参数。
以上方法在实际应用中有局限性,例如参数收敛速度慢、对环境变化适应度差。
因此模型参考自适应控制方法被提出。
二、模型参考自适应控制方法模型参考自适应控制(MRAC)方法是将环境变化视为干扰,引入一个理想模型作为参考模型,然后通过调整控制器参数,使得控制器输出与参考模型输出的误差最小,以实现自适应控制。
MRAC方法一般分为两类:直接调整和间接调整。
1. 直接调整法:通过直接调节控制器参数来使得控制器输出与参考模型输出误差最小。
例如,自适应模型预测控制(AMPC)方法,即利用自适应模型预测算法来实现控制器参数调整。
2. 间接调整法:通过间接调节某个量,再根据反馈原理将调节量转化为控制器参数的调整。
例如,基于误差反馈的自适应控制(EFC)方法,即通过误差反馈来调整参考模型,再根据参考模型与实际系统模型的差异来实现控制器参数调整。
MRAC方法具有较高的控制精度、适应性强和鲁棒性好的特点,广泛应用于许多控制系统中。
三、自适应控制器的实现自适应控制器的实现主要包括硬件和软件两个方面。
自适应预失真射频功率放大器线性化
自适应预失真射频功率放大器线性化
贾建华;刘洋
【期刊名称】《同济大学学报(自然科学版)》
【年(卷),期】2005(033)010
【摘要】提出了新的带外信号检测方法和自适应模拟预失真线性化技术,并应用于CDMA直放站的5 W自适应射频线性功率放大器.通过自适应检测和自适应预失真控制,有效抑制临信道频谱再生,使输出信号的3阶和5阶交调失真分别改善8 dBc和6 dBc.
【总页数】3页(P1377-1379)
【作者】贾建华;刘洋
【作者单位】同济大学,信息与通信工程系,上海,200092;同济大学,信息与通信工程系,上海,200092
【正文语种】中文
【中图分类】TN722.16
【相关文献】
1.逆E类射频功率放大器的记忆多项式数字预失真线性化 [J], 曹韬
2.一种基于双查找表自适应预失真结构的射频功率放大器线性化方法 [J], 毛文杰;冉立新;陈抗生
3.一种射频功率放大器自适应预失真线性化技术 [J], 刘迪迪;罗晓署;王文延
4.射频功率放大器预失真线性化器设计 [J], 沈涛;曹桂兴
5.关于自适应预失真射频功率放大器线性化研究 [J], 贾建华;刘战胜
因版权原因,仅展示原文概要,查看原文内容请购买。
基于强酸当量的pH值前馈-自适应控制

过 程 控 制
化 自 化 仪 ,0 ,5 )83 工 动 及 表 283 1: —1 0 ( 2
C n ml n n t me t i h mia n u t o t d I sr a u n s n C e c lI d s ̄
中图分类号 : P 7 文献标识码 : 文章编号 : 0 03 3 (0 8 0 - 2 -4 T 23 A 10 — 2 2 0 ) 1 0 80 9 0 1 引 言
sn o 将模型推广至一般情况 。然而 , 过测量流 出成 通
ห้องสมุดไป่ตู้
p H控制广泛应用 于众多 的工业生产过 程 , 由于
基 于 强 酸 当量 的 p 值 前 馈 - H 自适 应 控 制
郭 亮 , 红瑞 , 石 褚励 耘
( 东华大学 信息科学与技术学院 , 上海 2 12 ) 0 6 0
摘要 : 对 p H非线性过 程的控 制 , 在传统线性 自适应控制的基础上 , 采用基 于强酸 当量的过程模 型 , 引入 一
二 =F c 一 )+( 一 ) ( ( u i:1 2 … , ) ( ) , , n 1
其测量信号 ( H值 ) p 与控制量 之间具有 强烈 的非线
性关系 , 规 PD控 制在 多 数情 况 下无 法 胜 任 p 常 I H 控制 的要求 , 目前这 是过程 控制 中最 困难的 问题之
t am n rc s ae na t ae ld emo e NO. ( S ) i O tc n lg a rp sd T epe i ie r t e t o esb sdo ci tds g d l e p v u 2 A M2 wt A / eh ooyw spo oe . h rdc v h t
自适应在功率放大器非线性预失真中的应用
余 的2 %范 围 内使 用 小 步 长 ,从 而 提 高 收 敛 速 5
度 ,兼 顾 稳定性 ,完善 预失 真算法 。
收 稿 日期 :0 10 — 8 2 1 - 4 0
图 1 F R滤 波 器 方框 图 I
Байду номын сангаас
《 通用元器件 《
.1
L 算法要 保 证稳定 性 , 必须 满足 : MS
程 如 下
介 于在 的选 择 上存 在 的一 些 矛 盾 ,而 在传 统
预 失 真 的基 本 思 想 是 在 放 大 器 前 构 造 放 大 器
的逆 特 性 ,使 得 预 失 真 器 和 放 大 器 的 联 合特 性 呈 线 性 。本 文 是 在 这 种 思 想 的 指 导 下 ,对 预失 真器
的 自适 应 算 法 进 行 改 进 , 采 用 最 小 均 方 误 差 (MS 1方 法 ,在肛的选 择 上 ,使 用分 段 变步 长 法 , L E 在 均方 误差 降 低 到2 %范 围 内使 用 大 步长 ,在剩 5
功 率放 大器 fA P )有严 格 的线 性 度要 求 ,否则 系 统
性 能就 会严 重恶 化 。
自适 应 滤 波 器 它包 括 两 部 分 ,一 部 分 是 数 字
滤 波 器 ,一 部 分是 自适 应 算 法 ,可用 于 自适 应 滤
波器 的通 常有 两 种 ,一 种 是 无 限长 单 位 冲激 响 应 数字 滤 波 器 f R ,另 一种 是 有 限长 单 位 冲激 响应 I ) I 数字 滤 波 器 (I ) F R ,一 般 采 用FR滤 波 器 作 为 自适 I 应滤 波器 的首选 ,FR滤波 器 的方框 图如 图 1 示 。 I 所 输 入 与输 出之 间 的关 系 可表达 如下 :
自适应控制 课件
自适应控制与应用自适应控制与应用第一章自适应控制基本概念第二章模型参考自适应系统设计初步第三章用李亚普诺夫稳定性理论设计MRAC第四章用波波夫超稳定性理论设计MRAC第五章自校正技术及自校正控制器调节器的设计第六章极点配置的自校正技术第一章自适应控制的基本概念1-1 自适应控制的产生1-2自适应控制的定义1-3 自适应控制的基本原理1-4 自适应控制系统的主要类型1-5自适应控制的应用1-1 自适应控制的产生传统的控制系统设计方法,通常是首先建立被控对象的数学模型,然后根据所建数学模型的特性设计控制器(控制律),实施控制。
为了要成功的设计一个控制系统,无论是常规的反馈控制系统还是最优控制系统,都必须要设计者事先知道被控对象的所有特征,及其结构和参数。
1-1 自适应控制的产生设计都要求事先掌握被控对象或被控过程的数学模型。
然而有些数学模型是很难事先确知的,或者由于种种原因,一些系统的数学模型会在运行过程中发生较大范围的变化,这就是说,设计者对系统的特性并不是完全掌控的,或者说系统的特性是不肯定的。
在这些情况下,常规控制就往往达不到预定的控制要求。
引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
例如:引起被控对象特性发生变化的主要原因有:(1)由于系统所处环境的变化而引起的被控对象的参数值的变化。
1-1 自适应控制的产生许多控制对象的数学模型随着时间或工作环境的改变而发生变化,而变化规律往往事先不知道。
(2)系统本身由于工作情况的变化而引起自身参数值的改变.1-1 自适应控制的产生当被控对象的数学模型参数在小范围内变化时,可用一般的反馈控制、最优控制或补偿控制等方法使得系统对外部的扰动或内部参数的小范围变动不很敏感,以达到预期性能。
而当被控对象的数学模型参数在大范围内变化时,上述方法就不能圆满解决问题了,为了使控制对象的参数在大范围变化时,系统仍能自动的工作于最优或次优状态,因而提出了自适应控制的问题。
《自适应控制》课件
鲁棒性
稳定性
自适应控制系统在各种工况下保持稳定运行 的能力。
自适应控制系统对受控对象参数变化和扰统输出的准确度。
04
03
01
03 自适应控制的主要算法
最小均方误差算法
总结词
最小均方误差算法是一种基于误差反馈的自适应控制算法, 通过最小化期望输出与实际输出之间的误差来实现系统参数 的调整。
实验目标
通过自适应控制算法实现对单输入单输出系统的有效 控制。
实验步骤
详细介绍实验的操作步骤,包括系统建模、控制器设 计、参数调整等。
实验结果
展示实验结果,包括系统的响应曲线、性能指标等, 并进行分析和讨论。
实验案例二:多输入多输出系统的自适应控制
实验目标
通过自适应控制算法实现对多输入多输出系统的有效控制。
机器人技术
自适应控制在机器人技术领域中应用于机器人的运动控 制和感知控制,以提高机器人的自主性和适应性。
自适应控制的发展历程
起步阶段
自适应控制的思想可以追溯到20 世纪50年代,当时主要是针对线 性时不变系统进行研究。
发展阶段
到了20世纪70年代,自适应控制 开始广泛应用于航空航天和工业 自动化领域,并逐渐形成了较为 完善的理论体系。
智能制造
在智能制造领域,自适应控制技术可以提高 生产线的自动化水平,优化生产过程,提高 生产效率和产品质量。
自适应控制算法的优化与改进
要点一
鲁棒性增强
要点二
实时性优化
针对复杂环境和不确定性因素,自适应控制算法需要进一 步增强鲁棒性,提高系统的稳定性和可靠性。
针对实时性要求高的系统,自适应控制算法需要进一步优 化计算效率和响应速度,以满足快速控制的需求。
微波功率放大器的自适应预失真线性化技术的开题报告
微波功率放大器的自适应预失真线性化技术的开题报告一、选题背景与意义随着通信技术的不断发展,微波领域的功率放大器扮演着越来越重要的角色。
微波功率放大器具有广泛的应用领域,如卫星通信、雷达、无线电通信等领域。
功率放大器是微波系统中的关键部件,它的性能对整个系统的性能起着至关重要的作用。
功率放大器具有非线性特性,这种非线性特性将导致功率放大器输出信号的失真,从而影响系统的性能。
传统的解决方法是使用线性化技术,其中最普遍的方法是使用预失真技术。
预失真技术的原理是在输入信号前加入一个失真信号,该失真信号可以抵消功率放大器的非线性特性,从而提高放大器的线性性能。
然而,传统的预失真技术通常需要使用非常昂贵的精密元器件,这限制了预失真技术的广泛应用。
自适应预失真技术是一种新型的预失真技术,它通过实时监测功率放大器的输出信号,然后根据监测结果调整预失真信号,以便实现更好的线性化效果。
自适应预失真技术不需要使用昂贵的精密元器件,因此成本较低,而且可以适应功率放大器的不同特性,从而提高预失真效果。
二、研究内容本项目旨在研究微波功率放大器的自适应预失真线性化技术。
具体研究内容包括以下几个方面:1. 自适应预失真技术原理研究。
详细介绍自适应预失真技术的基本原理,包括预失真信号的生成、监测功率放大器输出信号、分析监测结果以及调整预失真信号等方面。
2. 功率放大器非线性特性研究。
对功率放大器的非线性特性进行深入研究,分析常见的线性化方法以及其优缺点。
3. 基于数学模型的自适应预失真技术实现研究。
使用数学模型描述自适应预失真技术的实现过程,包括预失真信号的生成、监测功率放大器输出信号、分析监测结果以及调整预失真信号等方面。
4. 实验验证。
设计并实现基于自适应预失真技术的微波功率放大器线性化系统,通过实验验证自适应预失真技术的有效性。
三、研究方法与技术路线本项目采用理论研究与实验验证相结合的方法。
具体技术路线如下:1. 理论研究阶段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 自适应 控制 的数 学模型
船 电技 术 l 控制技术
制 任 务 ,对 消 点 的模拟 量 转 化 为一 个 数 字 量后 进 入 DS P后 ,由程序 完成 控 制 算 法 ,输 出数 字 量 的 幅 度和 相 位 ,对 放 大器 进 行 控 制 。 图 3和 图 4分 别 是主 环 和 误 差 环 的控 制 原 理 图[。 4 1
船 电技 术 l 控制技术
前 馈 式 线 性 功 率 放 大 器 的 自适 应 控 制
胡颖娟 李维 刚
( 中科芯集 成 电路有 限公 司,西 安 7 0 6 ) 10 5
摘 要 :在 移 动 通 讯 领 域 内 ,线 性 功 率 放 大 器 的 高 线 性 度 是 保 障 通 讯 信 息 无 失 真 传 播 的重 要 因 素 。本 文 基 于
1 引言
随着 通 信 领 域 的新 技 术 的 飞速 发 展 和 应 用 , 通 讯 系 统 对 射 频 功 率 放 大 器 线 性 度 提 出 新 的 要 求 。伴 随着 功放 性 能 的不 断 提 升 ,各 种 提 高 放 大 器 线 性 度 的 方法 逐 渐 应 用 于 实 践 中 ,极 大 地 改 善 功 率 放 大器 的线 性 指 标 。本文 主 要 介 绍 前 馈 式放 大 器 的 原理 和 实现 方 法 。前馈 技 术 适 用 于 宽 带 和 多载 波 场合 , 于 第三 代 移 动 通 信 系 统 十 分有 利 。 对 前 馈 技 术提 供 了较 高 校 准 精 度 , 具有 系 统 稳 定 和
E p r na s l h w ta e e o m n eig o . x ei tl euts o th r r a c o d me r s h t p f s Ke r s ed owad l e r ain o e m l e ; a a t e o t l ywo d :fe f r r  ̄ i a i t w r p i r d p i nr n图 1前馈 线性化 技术 原理
图 l中 : V = G A +
=
/ = l , G G一 i / e G = V e 一c V G
V = or
收 稿 日期 :2 1 -9 1 0 00 .2
作者 简介 :胡颖娟 (9 3 ) 1 7 一 ,女 ,工程 师 。工作方 向: 嵌入 式软件 开发 。
文 献分类 号 :1 0 —8 2 ( 0 0 20 4 .4 0 34 6 2 1 )1.0 4 0
Ada i nt o fFe d Fo wa d Li a i a i w e ptveCo r lo e r r ne r z ton Po rAm plfe i r i
主 功 放
2 前馈式线 性功放 的原 理
前馈 线 性 化 技 术 原 理 如 图 1所 示…。射 频信 号 输 人后 ,经 功 分 器 分 成两 路 。一 路 进 入 主 功率
放 大 器 MA, 由于 其 非 线 性 失真 ,输 出端 A 点 除 了有 需 要放 大 的主 频 信 号 外 ,还 有 交 调 干 扰 。 从
5 自适 应控 制算法
以上 介 绍 控制 单 元 硬 件 组 成 , 自适 应 算 法 是
在 DS P的软 件 中实现 。图 5是 主环 和 误 差 环 的控
p w ra p ie n h d p iedgtlc nr l lo i m e l ehg ie ry o eP so tie . o e m l ra d te a a t ii o t g r h ,rai ih l a i t A i ban d f v a oa t z n tf h
前馈线 性放 大器 的原 理 ,利用数 字 自适应 控制 算法 ,实 现 了功率 放大 器 的高线 性度 。实验 数 据表 明这种 方
法 取 得 良好 的 控 制 效 果 。
关 键 词 :前 馈
线 性 功 率 放 大 器 自适 应 控 制
中图分 类号 :T 2 .5 N7 27
文献 标识码 :A
H n j a , L ia g uYigu n i gn We
( KSItgae i ut i tdC roa o , Xin 0 5 C ia C ne rtdC r iL mi op rt n c e i a 7 6 , hn ) 1 0
Ab ta t sr c :Hih l e rt ep w ra p ie P )i a m o tn a tro et n mi inwi o t g i a i o t o e m l r(A s n ip r t co t r s s o t u n yf h i f a f f h a s h dso t n i m bl o i ri n o i c mmu i t nsse . a e n tep ic l o e e owad o n a i t n t o e nc i y tms B s d o h rn i ef t d r r fl e r ai ao p h f i z o
带 宽 不受 限 的优 点 。
主 功 放 的输 出中耦 合 ~部 分 信 号 与 另 一 路经 过 延
时线 T 延 时 的输 入 信 号 在 叠 加器 中叠 加 , 主 D1 使 载 频 信 号 完 全抵 消 ,只 剩 下 交 调 分 量 。交 调 分 量 经 误 差 放 大 器 放 大 后 与 延 时线 T D2 延 时 的主 功 放 输 出信 号 在 叠加 器 中 叠加 ,抵 消 主 功放 的交 调 干 扰 ,从 而 得 到线 性 的放 大 信 号 。