基于Matlab的无标度网络仿真
无标度网络
无标度网络(或称无尺度网络)的概念是随着对复杂网络的研究而出现的。“网络”其实就是数学中图论研究的图,由一群顶点以及它们之间所连的边构成。在网络理论中则换一套说法,用“节点”代替“顶点”,用“连结”代替“边”。复杂网络的概念,是用来描述由大量节点以及这些节点之间错综复杂的联系所构成的网络。ER模型随机网络有一个重要特性,就是虽然节点之间的连接是随机形成的,但最后产生的网络的度分布是高度平等的。度分布是指节点的度的分布情况。在网络中,每个节点都与另外某些节点相连,这种连接的数目叫做这个节点的度。在网络中随机抽取一个节点,它的度是多少呢?这个概率分布就称为节点的度分布。
自二十世纪60年代开始,对复杂网络的研究主要集中在随机网络上。随机网络,又称随机图,是指通过随机过程制造出的复杂网络。最典型的随机网络是保罗·埃尔德什和阿尔弗雷德·雷尼提出的ER模型。ER模型是基于一种“自然”的构造方法:假设有n个节点,并假设每对节点之间相连的可能性都是常数。这样构造出的网络就是ER模型网络。
Matlab程序如下:
SFNG:
function SFNet = SFNG(Nodes, mlinks, seed)
seed = full(seed);
pos = length(seed);
rand('state',sum(100*clock));
Net = zeros(Nodes, Nodes, 'single');
Net(1:pos,1:pos) = seed;
sumlinks = sum(sum(Net));
while pos < Nodes
pos = pos + 1;
linkage = 0;
while linkage ~= mlinks
rnode = ceil(rand * pos);
deg = sum(Net(:,rnode)) * 2;
rlink = rand * 1;
if rlink < deg / sumlinks && Net(pos,rnode) ~= 1 && Net(rnode,pos) ~= 1
Net(pos,rnode) = 1;
Net(rnode,pos) = 1;
linkage = linkage + 1;
sumlinks = sumlinks + 2;
end
end
end
clear Nodes deg linkage pos rlink rnode sumlinks mlinks
SFNet = Net;
CNET:
function CNet(Net)
format compact
format long e
theta=linspace(0,2*pi,length(Net)+1);
xy = zeros(length(Net)+1,2);
x = cos(theta);
y = sin(theta);
xy(1:length(Net)+1,1) = x(1:length(Net)+1);
xy(1:length(Net)+1,2) = y(1:length(Net)+1);
figure, gplot(Net,xy,'.-');
set(gcf, 'Color', [1 1 1]);
axis('equal');
xlim([-1.1 1.1]);
ylim([-1.1 1.1]);
axis off;
Plplot:
function equation = PLplot(Net)
% Power-Law Degree Distribution Graphing
% Finds out how many connections each node has
connections = single(sum(Net));
% Initialize variable that will hold how many nodes have each degree frequency = single(zeros(1,length(Net)));
% Initialize variable that will hold the graphing quanitites
plotvariables = zeros(2,length(Net));
P = [];
for T = 1:length(Net)
% V ariable will be used as a list of possible degrees a node can have
P(1,T) = T;
if connections(1,T) ~= 0
frequency(1,connections(1,T)) = frequency(1,connections(1,T)) + 1;
end
end
for c = 1:length(frequency)
% Disregard degrees with no frequency
if frequency(1,c) ~= 0
[X,Y] = find(plotvariables == 0);
plotvariables(1,min(Y)) = P(1,c);
plotvariables(2,min(Y)) = frequency(1,c);
end
end
% Find the last non-zero element in plotvariables
for d = 1:length(plotvariables)
if plotvariables(1,d) == 0 & plotvariables(2,d) == 0 break
end
end
x = plotvariables(1,1:d-1);
y = plotvariables(2,1:d-1);
[g,f,b] = fit(x',y','power1');
H = loglog(x,y,'r+');
hold on;
plot(g);
xlim([.9 (max(sum(Net)) + 10)]);
ylim([.9 length(Net)]);
legend off;
H = xlabel('Degrees');
H = ylabel('Frequency');
% Use this feature to extract variables from cfit variables %a = g.a;
%b = g.b;
%rsquare = f.rsquare;
equation = g;
pubfile:
seed =[0 1 0 0 1;1 0 0 1 0;0 0 0 1 0;0 1 1 0 0;1 0 0 0 0] Net = SFNG(80, 1, seed);
PL_Equation = PLplot(Net)
CNet(Net)
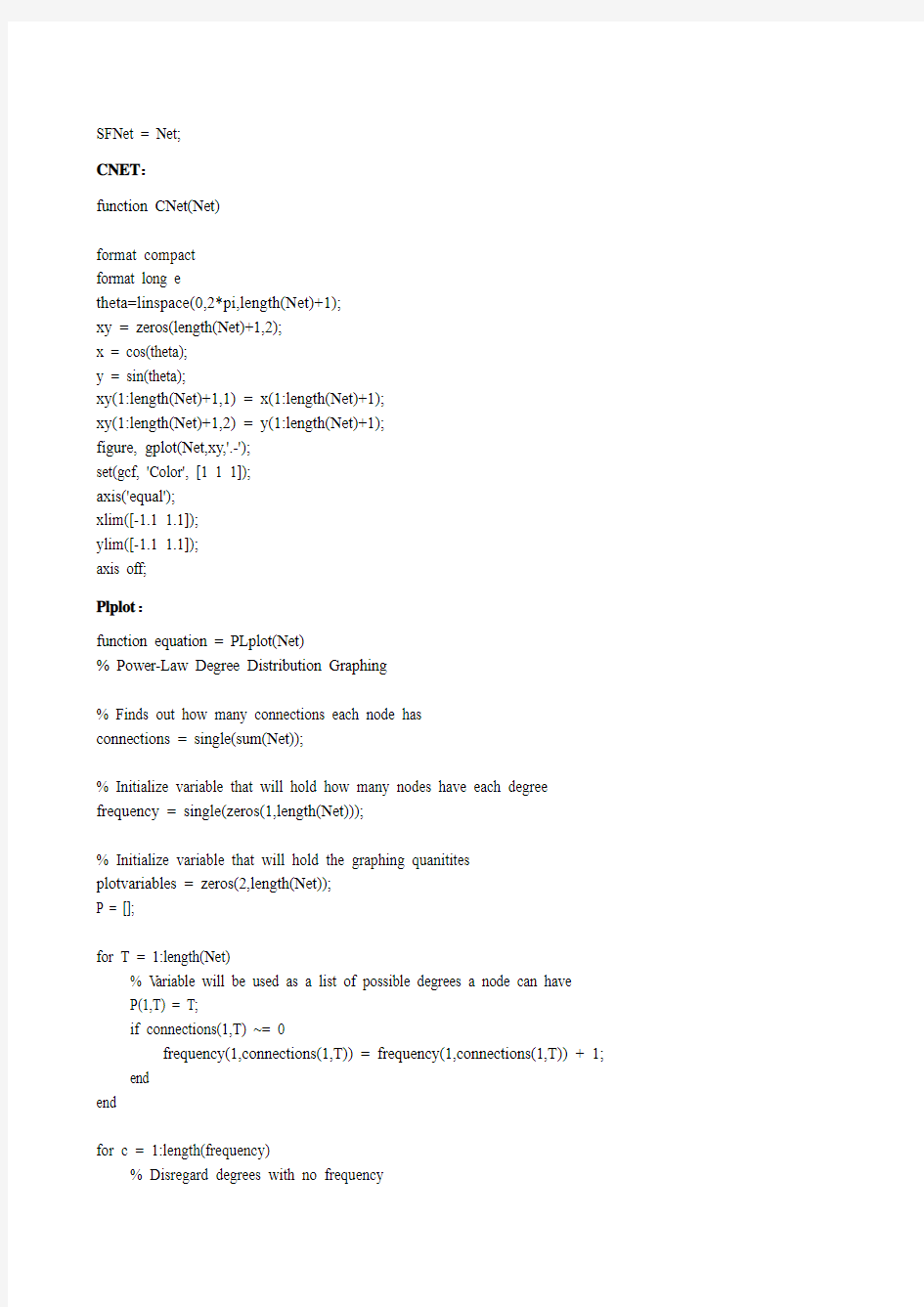
有80个节点的模型网络
10
10
100
101
Degrees F r e q u e n c y
神经网络学习算法matlab仿真(借鉴参照)
东南大学自动化学院 智能控制概论 神经网络学习算法研究 学院: 姓名: 学号: 日期:
目录 1 任务要求叙述 ..................................................... 错误!未定义书签。 2 系统分析及设计原理 ......................................... 错误!未定义书签。 3 设计实现.............................................................. 错误!未定义书签。4仿真验证.. (6) 5 讨论与分析.......................................................... 错误!未定义书签。
一.任务要求叙述 (1)任务 (a) 运行算法,观察和分析现有学习算法的性能; clear all;close all; nu=20;pi=3.1415926; for i=1:nu p(i)=2*pi*i/nu; t(i)=0.5*(1+cos(p(i))); end minmax=[min(p(:)) max(p(:))] net = newff([ 0 7],[6 1],{'logsig' 'purelin'},'traingd');% traingd traingdm trainlm net.trainParam.epochs = 10000; net.trainParam.goal = 0.0001; net.trainParam.show=200; net.trainParam.lr=0.1; net.trainParam.mc=0.6; %0.9 default value; available for momentum net = train(net,p,t); y1 = sim(net,p); figure(2); plot(p,t,'*-',p,y1,'r--') %************** test data ****************** nu2=nu*3/2; for i=1:(nu2) p2(i)=2*pi*i/(nu2); t2(i)=0.5*(1+cos(p2(i))); end y2 = sim(net,p2); figure(3); plot(t2,'*-');hold on; plot(y2,'r'); xlabel('times');ylabel('outputs'); figure(4); plot(t2-y2); xlabel('times');ylabel('error'); (b) 为了进一步提高学习逼近效果,可以采取那些措施,调节规律如何?根据所提的每种措施,修改算法程序,给出仿真效果验证、过程以及相应的曲线图,给出适当的评述;(c) 联系、结合前向神经网络的算法样本学习、测试等过程,谈谈本人对神经网络系统的一些认识和看法。
(完整版)BP神经网络matlab实例(简单而经典).doc
p=p1';t=t1'; [pn,minp,maxp,tn,mint,maxt]=premnmx(p,t); % 原始数据归一化 net=newff(minmax(pn),[5,1],{'tansig','purelin'},'traingdx'); %设置网络,建立相应的BP 网络net.trainParam.show=2000; % 训练网络 net.trainParam.lr=0.01; net.trainParam.epochs=100000; net.trainParam.goal=1e-5; [net,tr]=train(net ,pn,tn); %调用TRAINGDM 算法训练BP 网络 pnew=pnew1'; pnewn=tramnmx(pnew,minp,maxp); anewn=sim(net,pnewn); anew=postmnmx(anewn,mint,maxt); %对 BP 网络进行仿真%还原数据 y=anew'; 1、 BP 网络构建 (1)生成 BP 网络 net newff ( PR,[ S1 S2...SNl],{ TF1 TF 2...TFNl }, BTF , BLF , PF ) PR :由R 维的输入样本最小最大值构成的R 2 维矩阵。 [ S1 S2...SNl] :各层的神经元个数。 {TF 1 TF 2...TFNl } :各层的神经元传递函数。 BTF :训练用函数的名称。 (2)网络训练 [ net,tr ,Y, E, Pf , Af ] train (net, P, T , Pi , Ai ,VV , TV ) (3)网络仿真 [Y, Pf , Af , E, perf ] sim(net, P, Pi , Ai ,T ) {'tansig','purelin'},'trainrp' BP 网络的训练函数 训练方法 梯度下降法 有动量的梯度下降法 自适应 lr 梯度下降法 自适应 lr 动量梯度下降法弹性梯度下降法训练函数traingd traingdm traingda traingdx trainrp Fletcher-Reeves 共轭梯度法traincgf Ploak-Ribiere 共轭梯度法traincgp
神经网络建模及Matlab中重要的BP网络函数
神经网络建模及Matlab中重要的BP网络函数一、神经组织的基本特征 1.细胞体是一个基本的初等信号处理器,轴突是信号的输出通路,树突是信号的输入通路。信号从一个神经细胞经过突触传递到另一个细胞。 2.不同的神经元之间有不同的作用强度,称为联接强度。当某细胞收到信号时,它的电位发生变化,如果电位超过某一阈值时,该细胞处于激发态,否则处于抑制状态。 3.两神经元之间的联接强度随其激发与抑制行为相关性的时间平均值正比变化,也就是说神经元之间的联接强度不是一成不变的。这就是生物学上的Hebb律。
∑t j ij t S w )(二、人工神经元的M-P 模型(McCulloch 、Pitts,1943) 1.构造一个模拟生物神经组织的人工神经网络的三要素: (1).对单个神经元给出定义; (2).定义网络结构:决定神经元数量及连接方式; (3).给出一种方法,决定神经元之间的联接强度。 2.M-P 模型 其中,t 表示时间 S i (t)表示第i 个神经元在t 时刻的状态,S i (t)=1表示处于激发态,S i (t)=0表示处于抑制态 w ij 表示第j 个神经元到第i 个神经元的联接强度,称之为权,可正可负 表示第i 个神经元在t 时刻所接收到的所有信号的线性迭加。 μi 表示神经元i 的阈值, 可以在模型中增加一个S k (t)=1神经元k ,并且w ik =-μi ,则阈值可归并到和号中去。 注: 1.M-P 神经元虽然简单,但可以完成任何计算。 2.神经元的状态可以取[0,1]中的连续值,如用以下函数代替θ(x): ???<≥=-=+∑0 0011x x x t S w t S i j j ij i )() )(()(θμθ
无标度网络模型构造
课题:无标度网络模型构造 姓名赵训 学号201026811130 班级实验班1001
一、源起 无标度网络(或称无尺度网络)的概念是随着对复杂网络的研究而出现的。 “网络”其实就是数学中图论研究的图,由一群顶点以及它们之间所连的边构成。在网络理论中则换一套说法,用“节点”代替“顶点”,用“连结”代替“边”。复杂网络的概念,是用来描述由大量节点以及这些节点之间错综复杂的联系所构成的网络。这样的网络会出现在简单网络中没有的特殊拓扑特性。 自二十世纪60年代开始,对复杂网络的研究主要集中在随机网络上。随机网络,又称随机图,是指通过随机过程制造出的复杂网络。最典型的随机网络是保罗·埃尔德什和阿尔弗雷德·雷尼提出的ER模型。ER模型是基于一种“自然”的构造方法:假设有个节点,并假设每对节点之间相连的 可能性都是常数。这样构造出的网络就是ER模型网络。科学家们最初使用这种模型来解释现实生活中的网络。 ER模型随机网络有一个重要特性,就是虽然节点之间的连接是随机形成的,但最后产生的网络的度分布是高度平等的。度分布是指节点的度的分布情况。在网络中,每个节点都与另外某些节点相连,这种连接的数目叫做这个节点的度。在网络中随机抽取一个节点,它的度是多少呢?这个概率分布就称为节点的度分布。 在一般的随机网络(如ER模型)中,大部分的节点的度都集中在某个特殊值附近,成钟形的泊松分布规律(见下图)。偏离这个特定值的概率呈指数性下降,远大于或远小于这个值的可能都是微乎其微的,就如一座城市中成年居民的身高大致的分布一样。然而在1998年,Albert-László Barab ási、Réka Albert等人合作进行一项描绘万维网的研究时,发现通过超链接与网页、文件所构成的万维网网络并不是如一般的随机网络一样,有着均匀的度分布。他们发现,万维网是由少数高连接性的页面串联起来的。 绝大多数(超过80%)的网页只有不超过4个超链接,但极少数页面(不到总页面数的万分之一)却拥有极多的链接,超过1000个,有一份文件甚至与超过200万个其他页面相连。与居民身高的例子作类比的话,就是说大多数的节点都是“矮个子”,而却又有极少数的身高百丈的“巨人”。Barab ási等人将其称为“无标度”网络。
Matlab通信系统仿真实验报告
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
基于matlab实现BP神经网络模型仿真
基于BP神经网络模型及改进模型对全国历年车祸次数预测 一、背景 我国今年来随着经济的发展,汽车需求量不断地增加,所以全国每年的车祸次数也被越来越被关注,本文首先搜集全国历年车祸次数,接着通过这些数据利用BP神经网络模型和改进的径向基函数网络进行预测,最后根据预测结果,分析模型的优劣,从而达到深刻理解BP神经网络和径向基函数网络的原理及应用。所用到的数据即全国历年车祸次数来自中国汽车工业信息网,网址如下: https://www.360docs.net/doc/0315373384.html,/autoinfo_cn/cszh/gljt/qt/webinfo/2006/05/124650 1820021204.htm 制作历年全国道路交通事故统计表如下所示: 二、问题研究 (一)研究方向 (1)通过数据利用BP神经网络模型预测历年全国交通事故次数并与实际值进行比较。(2)分析BP神经网络模型改变训练函数再进行仿真与之前结果进行对比。 (3)从泛化能力和稳定性等方面分析BP神经网络模型的优劣。 (4)利用径向基函数网络模型进行仿真,得到结果与采用BP神经网络模型得到的结果进行比较。
(二)相关知识 (1)人工神经网络 人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)和之间相互联接构成。每个节点代表一种特定的输出函数,称为激励函数(activation function)。每两个节点间的连接都代表一个对于通过该连接信号的加权值,称之为权重,这相当于人工神经网络的记忆。网络的输出则依网络的连接方式,权重值和激励函数的不同而不同。而网络自身通常都是对自然界某种算法或者函数的逼近,也可能是对一种逻辑策略的表达。 人工神经网络有以下几个特征: (1)非线性非线性关系是自然界的普遍特性。大脑的智慧就是一种非线性现象。人工神经元处于激活或抑制二种不同的状态,这种行为在数学上表现为一种非线性网络关系。具有阈值的神经元构成的网络具有更好的性能,可以提高容错性和存储容量。 (2)非局限性一个神经网络通常由多个神经元广泛连接而成。一个系统的整体行为不仅取决于单个神经元的特征,而且可能主要由单元之间的相互作用、相互连接所决定。通过单元之间的大量连接模拟大脑的非局限性。联想记忆是非局限性的典型例子。 (3)非常定性人工神经网络具有自适应、自组织、自学习能力。神经网络不但处理的信息可以有各种变化,而且在处理信息的同时,非线性动力系统本身也在不断变化。经常采用迭代过程描写动力系统的演化过程。 (4)非凸性一个系统的演化方向,在一定条件下将取决于某个特定的状态函数。例如能量函数,它的极值相应于系统比较稳定的状态。非凸性是指这种函数有多个极值,故系统具有多个较稳定的平衡态,这将导致系统演化的多样性。 (2)BP神经网络模型 BP(Back Propagation)网络是1986年由Rumelhart和McCelland为首的科学家小组提出,是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer)。 (3)径向基函数网络模型 径向基函数(Radial Basis Function,RBF)神经网络由三层组成,输入层节点只传递输入信号到隐层,隐层节点由像高斯函数那样的辐射状作用函数构成,而输出层节点通常是简单的线性函数。 隐层节点中的作用函数(基函数)对输入信号将在局部产生响应,也就是说,当输入信号靠近基函数的中央范围时,隐层节点将产生较大的输出,由此看出这种网络具有局部逼近能力,所以径向基函数网络也称为局部感知场网络。
无标度网络matlab建模
复杂系统无标度网络研究与建模 XXX 南京信息工程大学XXXX系,南京 210044 摘要:21世纪是复杂性的世界,基于还原论的世界观与方法论已经无法满足当前人们对作为一个整体系统的自然界和人类社会的认识和研究,利用系统科学的方法对科学重新审视已近变为迫切的需要。现实生活中众多复杂网络都具有无标度性,这种无标度网络的增长性和择优连接性很好的解释了富者越富的“马太效应”。对无标度网络的深入研究,让人们深刻的认识到其在Internet、地震网、病毒传播和社会财富分布网中的理论与现实意义。本文通过对复杂网络中的无标度网络的分析与研究,介绍了无标度网络区别于一般随机网络的特性与现实意义,并利用了Matlab生成了一个无标度网络。 关键词:无标度网络,幂律特性,模型建立 1 引言 任何一种网络都可以看作是由一些节点按某种方式连接在一起而构成的一个系统,曾经关于网络结构的研究常常着眼于包含几十个到几百个节点的网络,而近几年关于复杂网络的研究中则常常可以见上万个节点的网络,网络规模尺度上的改变也促使网络分析方法做相应的改变,而复杂网络是近年来随着网络规模、理论和计算机技术的飞速发展而出现的一个新的研究方向。它的出现不仅顺应了现代科技的发展趋势,而且反映了在以信息科学为支柱的新世纪中,各学科理论及应用交叉、渗透和融合的发展趋势[1]。复杂系统主要研究其个体之间相互作用所产生的系统的整体性质与行为“复杂系统的复杂性体现在系统的整体性质与行为往往不是系统各个个体的状态的简单综合”因此,复杂系统的研究不能采用还原论的方法,而要从整体上进行研究。 在对复杂系统的研究中,美国物理学家Barabasi和Albert通过对万维网的研究,发现万维网中网页连接的度分布服从幂律分布,而万维网中少数网页(Hub点)具有非常大的连接,大多数网页的连接数甚小Barabasi等把度分布为幂律分布(Power law)的复杂网络称为无标度网络(scale-free net)[2]。 经过众多的科研工作者的努力,已经证实了现实世界中无论是自然界还是人类社会都广泛的存在着具有度分布符合幂律分布的无标度网络,如生物网络、Internet网、WWW网、演员合作网、科学研究合作网、财富分布网、地震网、电站供电网、科技引文网和病毒传播网等。Newman将这些复杂网络粗略地分成四类:社会网络、信息网络、技术网络和生物网络[3]。
matlab通信仿真常用函数
信源函数 randerr 产生比特误差样本 randint 产生均匀分布的随机整数矩阵 randsrc 根据给定的数字表产生随机矩阵 wgn 产生高斯白噪声 信号分析函数 biterr 计算比特误差数和比特误差率 eyediagram 绘制眼图 scatterplot 绘制分布图 symerr 计算符号误差数和符号误差率 信源编码 compand mu律/A律压缩/扩张 dpcmdeco DPCM(差分脉冲编码调制)解码dpcmenco DPCM编码 dpcmopt 优化DPCM参数 lloyds Lloyd法则优化量化器参数 quantiz 给出量化后的级和输出值 误差控制编码 bchpoly 给出二进制BCH码的性能参数和产生多项式convenc 产生卷积码 cyclgen 产生循环码的奇偶校验阵和生成矩阵cyclpoly 产生循环码的生成多项式 decode 分组码解码器 encode 分组码编码器 gen2par 将奇偶校验阵和生成矩阵互相转换gfweight 计算线性分组码的最小距离 hammgen 产生汉明码的奇偶校验阵和生成矩阵rsdecof 对Reed-Solomon编码的ASCII文件解码rsencof 用Reed-Solomon码对ASCII文件编码rspoly 给出Reed-Solomon码的生成多项式
syndtable 产生伴随解码表 vitdec 用Viterbi法则解卷积码 (误差控制编码的低级函数) bchdeco BCH解码器 bchenco BCH编码器 rsdeco Reed-Solomon解码器 rsdecode 用指数形式进行Reed-Solomon解码 rsenco Reed-Solomon编码器 rsencode 用指数形式进行Reed-Solomon编码 调制与解调 ademod 模拟通带解调器 ademodce 模拟基带解调器 amod 模拟通带调制器 amodce 模拟基带调制器 apkconst 绘制圆形的复合ASK-PSK星座图 ddemod 数字通带解调器 ddemodce 数字基带解调器 demodmap 解调后的模拟信号星座图反映射到数字信号dmod 数字通带调制器 dmodce 数字基带调制器 modmap 把数字信号映射到模拟信号星座图(以供调制)qaskdeco 从方形的QASK星座图反映射到数字信号qaskenco 把数字信号映射到方形的QASK星座图 专用滤波器 hank2sys 把一个Hankel矩阵转换成一个线性系统模型hilbiir 设计一个希尔伯特变换IIR滤波器 rcosflt 升余弦滤波器 rcosine 设计一个升余弦滤波器 (专用滤波器的低级函数) rcosfir 设计一个升余弦FIR滤波器 rcosiir 设计一个升余弦IIR滤波器 信道函数
神经网络PID控制及Matlab仿真
神经网络PID控制及Matlab仿真 摘要 PID控制技术是一种应用很普遍的控制技术,目前在很多方面都有广泛的应用。论文首先简要介绍了神经网络的理论基础和神经网络的学习算法,传统的常规PID控制器。为了达到改善常规PID控制器在复杂的、动态的和不确定的系统控制还存在着许多不足之处的目的,文中系统的分析了神经网络PID控制器。 本文主要研究了神经网络PID控制。利用神经网络具有强的非线性映射能力、自学习能力、联想记忆能力、并行信息处理方式及优良的容错性能,应用神经网络对PID控制器进行改进后,对于工业控制中的复杂系统控制有着更好的控制效果,有效的改善了由于系统结构和参数变化导致的控制效果不稳定。文中深入研究了基于神经网络的BP神经网络PID控制器及其仿真等。 最后,对常规PID控制器和神经网络PID控制器进行了仿真比较,仿真结果表明,应用神经网络对常规PID控制器进行改进后提高了系统的鲁棒性和动态特性,有 效的改善了系统控制结果,达到了预期的目的前言 在工业控制过程中,PID控制是一种最基本的控制方式,其鲁棒性好、结构简单、易于实现,但常规的PID控制也有其自身的缺点,因为常规PID控制器的参数是根据被控对象数学模型确定的,当被控对象的数学模型是变化的、非线性的时候,PID参数不易根据其实际的情况做出调整,影响了控制质量,使控制系统的控制品质下降。特别是在具有纯滞后特性的工业过程中,常规的PID控制更难满足控制精度的要求。 PID控制是最早发展起来的控制策略之一,按偏差的比例、积分和微分进行控制的调节器称为 PID控制器,它是连续系统中技术成熟,应用最广泛的一种调节器。由于其算法简单,实现简易、鲁棒性能良好和可靠性高,能够对很大一类工业对象进行有效控制等一系列优点,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。但是在实际的工业生产过程中,往往具有非线性,时变不确定性,因而难以建立精确的数学模型,应用常规 PID控制器不能达到理想的控制效果:在实际生产过程中,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良,性能欠佳,对运行工况的适应性很差。
BP神经网络地设计实例(MATLAB编程)
神经网络的设计实例(MATLAB编程) 例1 采用动量梯度下降算法训练BP 网络。训练样本定义如下: 输入矢量为 p =[-1 -2 3 1 -1 1 5 -3] 目标矢量为t = [-1 -1 1 1] 解:本例的MATLAB 程序如下: close all clear echo on clc % NEWFF——生成一个新的前向神经网络% TRAIN——对BP 神经网络进行训练 % SIM——对BP 神经网络进行仿真pause % 敲任意键开始 clc % 定义训练样本 P=[-1, -2, 3, 1; -1, 1, 5, -3]; % P 为输入矢量T=[-1, -1, 1, 1]; % T 为目标矢量
clc % 创建一个新的前向神经网络 net=newff(minmax(P),[3,1],{'tansig','purelin'},'traingdm') % 当前输入层权值和阈值 inputWeights=net.IW{1,1} inputbias=net.b{1} % 当前网络层权值和阈值 layerWeights=net.LW{2,1} layerbias=net.b{2} pause clc % 设置训练参数 net.trainParam.show = 50; net.trainParam.lr = 0.05; net.trainParam.mc = 0.9; net.trainParam.epochs = 1000; net.trainParam.goal = 1e-3; pause clc % 调用TRAINGDM 算法训练BP 网络 [net,tr]=train(net,P,T);
基于Matlab的无标度网络仿真
无标度网络 无标度网络(或称无尺度网络)的概念是随着对复杂网络的研究而出现的。“网络”其实就是数学中图论研究的图,由一群顶点以及它们之间所连的边构成。在网络理论中则换一套说法,用“节点”代替“顶点”,用“连结”代替“边”。复杂网络的概念,是用来描述由大量节点以及这些节点之间错综复杂的联系所构成的网络。ER模型随机网络有一个重要特性,就是虽然节点之间的连接是随机形成的,但最后产生的网络的度分布是高度平等的。度分布是指节点的度的分布情况。在网络中,每个节点都与另外某些节点相连,这种连接的数目叫做这个节点的度。在网络中随机抽取一个节点,它的度是多少呢?这个概率分布就称为节点的度分布。 自二十世纪60年代开始,对复杂网络的研究主要集中在随机网络上。随机网络,又称随机图,是指通过随机过程制造出的复杂网络。最典型的随机网络是保罗·埃尔德什和阿尔弗雷德·雷尼提出的ER模型。ER模型是基于一种“自然”的构造方法:假设有n个节点,并假设每对节点之间相连的可能性都是常数。这样构造出的网络就是ER模型网络。 Matlab程序如下: SFNG: function SFNet = SFNG(Nodes, mlinks, seed) seed = full(seed); pos = length(seed); rand('state',sum(100*clock)); Net = zeros(Nodes, Nodes, 'single'); Net(1:pos,1:pos) = seed; sumlinks = sum(sum(Net)); while pos < Nodes pos = pos + 1; linkage = 0; while linkage ~= mlinks rnode = ceil(rand * pos); deg = sum(Net(:,rnode)) * 2; rlink = rand * 1; if rlink < deg / sumlinks && Net(pos,rnode) ~= 1 && Net(rnode,pos) ~= 1 Net(pos,rnode) = 1; Net(rnode,pos) = 1; linkage = linkage + 1; sumlinks = sumlinks + 2; end end end clear Nodes deg linkage pos rlink rnode sumlinks mlinks
MATLAB实现通信系统仿真实例
补充内容:模拟调制系统的MATLAB 仿真 1.抽样定理 为了用实验的手段对连续信号分析,需要先对信号进行抽样(时间上的离散化),把连续数据转变为离散数据分析。抽样(时间离散化)是模拟信号数字化的第一步。 Nyquist 抽样定律:要无失真地恢复出抽样前的信号,要求抽样频率要大于等于两倍基带信号带宽。 抽样定理建立了模拟信号和离散信号之间的关系,在Matlab 中对模拟信号的实验仿真都是通过先抽样,转变成离散信号,然后用该离散信号近似替代原来的模拟信号进行分析的。 【例1】用图形表示DSB 调制波形)4cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%%一般选取的抽样频率要远大于基带信号频率,即抽样时间间隔要尽可能短。 ts=1/fs; %%根据抽样时间间隔进行抽样,并计算出信号和包络 t=(0:ts:pi/2)';%抽样时间间隔要足够小,要满足抽样定理。 envelop=cos(2*pi*t);%%DSB 信号包络 y=cos(2*pi*t).*cos(4*pi*t);%已调信号 %画出已调信号包络线 plot(t,envelop,'r:','LineWidth',3); hold on plot(t,-envelop,'r:','LineWidth',3); %画出已调信号波形 plot(t,y,'b','LineWidth',3); axis([0,pi/2,-1,1])% hold off% xlabel('t'); %写出图例 【例2】用图形表示DSB 调制波形)6cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%抽样时间间隔要足够小,要满足抽样定理。 ts=1/fs; %%根据抽样时间间隔进行抽样
Matlab训练好的BP神经网络如何保存和读取方法(附实例说明)
Matlab训练好的BP神经网络如何保存和读取方法(附实例说明) 看到论坛里很多朋友都在提问如何存储和调用已经训练好的神经网络。 本人前几天也遇到了这样的问题,在论坛中看了大家的回复,虽然都提到了关键的两个函数“save”和“load”,但或多或少都简洁了些,让人摸不着头脑(呵呵,当然也可能是本人太菜)。通过不断调试,大致弄明白这两个函数对神经网络的存储。下面附上实例给大家做个说明,希望对跟我有一样问题的朋友有所帮助。 如果只是需要在工作目录下保到当前训练好的网络,可以在命令窗口 输入:save net %net为已训练好的网络 然后在命令窗口 输入:load net %net为已保存的网络 加载net。 但一般我们都会在加载完后对网络进行进一步的操作,建议都放在M文件中进行保存网络和调用网络的操作 如下所示: %% 以函数的形式训练神经网络 functionshenjingwangluo() P=[-1,-2,3,1; -1,1,5,-3]; %P为输入矢量 T=[-1,-1,1,1,]; %T为目标矢量 net=newff(minmax(P),[3,1],{'tansig','purelin'},'traingdm') %创建一个新的前向神经网络 inputWeights=net.IW{1,1} inputbias=net.b{1} %当前输入层权值和阀值 layerWeights=net.LW{2,1} layerbias=net.b{2} net.trainParam.show=50; net.trainParam.lr=0.05; net.trainParam.mc=0.9;
无标度网络及MATLAB建模
无标度网络 1.简介 传统的随机网络(如ER模型),尽管连接是随机设置的,但大部分节点的连接数目会大致相同,即节点的分布方式遵循钟形的泊松分布,有一个特征性的“平均数”。连接数目比平均数高许多或低许多的节点都极少,随着连接数的增大,其概率呈指数式迅速递减。故随机网络亦称指数网络。 现实世界的网络大部分都不是随机网络,少数的节点往往拥有大量的连接,而大部分节点却很少,一般而言他们符合zipf定律,(也就是80/20马太定律)。人们给具有这种性质的网络起了一个特别的名字——无标度网络。这里的无标度是指网络缺乏一个特征度值(或平均度值),即节点度值的波动范围相当大。 现实中的交通网,电话网和Internet都是无标度网络,在这种网络中,存在拥有大量连接的集散节点。分布满足幂律的无标度网络还具有一个奇特的性质—“小世界”特性。虽然万维网中的页面数已超过80亿,但平均来说,在万维网上只需点击19次超链接,就可从一个网页到达任一其它页面。 无标度网络具有严重的异质性,其各节点之间的连接状况(度数)具有严重的不均匀分布性:网络中少数称之为Hub点的节点拥有极其多的连接,而大多数节点只有很少量的连接。少数Hub点对无标度网络的运行起着主导的作用。从广义上说,无标度网络的无标度性是描述大量复杂系统整体上严重不均匀分布的一种内在性质。 1999 年, Albert、Jeong和Barabs发现万维网网页的度分布不是通常认为的Poisson 分布,而是重尾特征的幂律分布,而且万维网基本上是由少数具有大量超链接的网页串连起来的, 绝大部分网页的链接很少,他们把网络的这个特性称为无标度性(Scale-free nature, SF)。1999 年Barabs和Albert考察了实际网络的生成机制, 发现增长和择优连接是实际网络演化过程的两个基本要素, 他们创造性地构建了能够产生无标度特性的第一个网络模型——BA 模型。 BA 网络主要具有以下特性: 具有幂律度分布, 是一个无标度网络; 具有小世界特征。幂律度分布的重尾特征导致无标度网络中有少数具有大量连接边的中枢点, 择优连接必然产生“富者愈富”的现象。BA 网络同时具有鲁棒性和脆弱性,面对结点的随机失效, 网络具有鲁棒性;但面对蓄意攻击时, 由于中枢点的存在, 网络变得十分脆弱, 很容易陷于瘫痪。 特别地, 网络传染性疾病在无标度网络中不存在传播阈值, 疾病一旦产生就在网络上迅速传播并达到稳定状态。如果没有人为干预, 疾病将在网络中永远存在, 不会自动灭绝。这对制定无标度网络上的网络疾病防控策略提出了重大挑战。 2.BA无标度网络构成原则 ( 1) 增长: 网络开始于少数几个结点(初始设定为m0个) , 每个相等时间间隔增加一个新点, 新点与m个(m小于等于m0)不同的已经存在于网络中的旧点相连产生m条新边。 (2)择优连接:新点与旧点i相连的概率P取决于结点i的度数ki。
(完整版)基于matlab的通信系统仿真毕业论文
创新实践报告
报 告 题 目: 学 院 名 称: 姓 名:
基于 matlab 的通信系统仿真 信息工程学院 余盛泽
班 级 学 号: 指 导 老 师: 温 靖
二 O 一四年十月十五日
目录
一、引言........................................................................................................................ 3 二、仿真分析与测试 ................................................................................................... 4
2.1 随机信号的生成 ............................................................................................................... 4 2.2 信道编译码 ........................................................................................................................ 4 2.2.1 卷积码的原理 ........................................................................................................ 4 2.2.2 译码原理 ................................................................................................................ 5 2.3 调制与解调 ....................................................................................................................... 5 2.3.1 BPSK 的调制原理 .................................................................................................. 5 2.3.2 BPSK 解调原理 ...................................................................................................... 6 2.3.3 QPSK 调制与解调 ................................................................................................. 7 2.4 信道 .................................................................................................................................... 8
人工神经网络作业MATLAB仿真(共3篇)
人工神经网络作业M A T L A B 仿真(共3篇) -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
人工神经网络仿真作业(3篇) 人工神经网络仿真作业1: 三级倒立摆的神经网络控制 人工神经网络仿真作业2: 基于模型整体逼近的机器人RBF网络自适应控制 人工神经网络仿真作业3: 基于RBF的机械手无需模型自适应控制研究
神经网络仿真作业1:三级倒立摆的神经网络控制 摘要:建立了基于人工神经网络改进BP 算法的三级倒立摆的数学模型,并给 出了BP 网络结构,利用Matlab 软件进行训练仿真,结果表明,改进的BP 算法控制倒立摆精度高、收敛快,在非线性控制、鲁棒控制等领域具有良好的应用前景。 1.引言 倒立摆系统的研究开始于19世纪50年代,它是一个典型的非线性、高阶次、多变量、强耦合和绝对不稳定系统.许多抽象的控制概念,如系统的稳定性、可控性、系统的收敛速度和抗干扰能力都可以通过倒立摆直观地表现出来。随着现代控制理论的发展,倒立摆的研究对于火箭飞行控制和机器人控制等现代高科技的研究具有重要的实践意义。目前比较常见的倒立摆稳定控制方法有线性控制,如LQR,LQY 等;智能控制,如变论域自适应模糊控制,遗传算法,预测控制等。 2.系统的数学模型 2.1三级倒立摆的模型及参数 三级倒立摆主要由小车,摆1、摆2、摆3组成,它们之间自由链接。小车可以在水平导轨上左右平移,摆杆可以在铅垂平面内运动,将其置于坐标系后如图1 所示: 规定顺时针方向的转角和力矩均为正。此外,约定以下记号:u 为外界作用力,x 为小车位移,i (i =1,2,3)为摆i 与铅垂线方向的夹角, i O 分别为摆i 的链接点位置。其它的系统参数说明如下:
Matlab通信系统建模与仿真例题源代码-第三章
% ch3example1A.m clear; f_p=2400; f_s=5000; R_p=3; R_s=25; % 设计要求指标 [n, fn]=buttord(f_p,f_s,R_p,R_s, 's'); % 计算阶数和截止频率 Wn=2*pi*fn; % 转换为角频率 [b,a]=butter(n, Wn, 's'); % 计算H(s) f=0:100:10000; % 计算频率点和频率范围 s=j*2*pi*f; % s=jw=j*2*pi*f H_s=polyval(b,s)./polyval(a,s); % 计算相应频率点处H(s)的值 figure(1); subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅频特性 axis([0 10000 -40 1]); xlabel('频率Hz');ylabel('幅度dB'); subplot(2,1,2); plot(f, angle(H_s)); % 相频特性 xlabel('频率Hz');ylabel('相角rad'); figure(2); freqs(b,a); % 也可用指令freqs直接画出H(s)的频率响应曲线。 % ch3example1B.m clear; f_p=2400; f_s=5000; R_p=3; R_s=25; % 设计要求指标 [n, fn]=ellipord(f_p,f_s,R_p,R_s,'s'); % 计算阶数和截止频率 Wn=2*pi*fn; % 转换为角频率 [b,a]=ellip(n,R_p,R_s,Wn,'s'); % 计算H(s) f=0:100:10000; % 计算频率点和频率范围 s=j*2*pi*f; % s=jw=j*2*pi*f H_s=polyval(b,s)./polyval(a,s); % 计算相应频率点处H(s)的值 figure(1); subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅频特性 axis([0 10000 -40 1]); xlabel('频率Hz');ylabel('幅度dB'); subplot(2,1,2); plot(f, angle(H_s)); % 相频特性 xlabel('频率Hz');ylabel('相角rad'); figure(2); freqs(b,a); % 也可用指令freqs直接画出H(s)的频率响应曲线。 % ch3example2A.m f_N=8000; % 采样率 f_p=2100; f_s=2500; R_p=3; R_s=25; % 设计要求指标 Ws=f_s/(f_N/2); Wp=f_p/(f_N/2); % 计算归一化频率 [n, Wn]=buttord(Wp,Ws,R_p,R_s); % 计算阶数和截止频率 [b,a]=butter(n, Wn); % 计算H(z) figure(1); freqz(b,a, 1000, 8000) % 作出H(z)的幅频相频图, freqz(b,a, 计算点数, 采样率)
BP神经网络matlab实例
神经网络Matlab p=p1';t=t1'; [pn,minp,maxp,tn,mint,maxt]=premnmx(p,t); %原始数据归一化net=newff(minmax(pn),[5,1],{'tansig','purelin'},'traingdx');%设置网络,建立相应的BP网络 net.trainParam.show=2000; % 训练网络 net.trainParam.lr=0.01; net.trainParam.epochs=100000; net.trainParam.goal=1e-5; [net,tr]=train(net ,pn,tn); %调用TRAINGDM算法训练BP网络 pnew=pnew1'; pnewn=tramnmx(pnew,minp,maxp); anewn=sim(net,pnewn); %对BP网络进行仿真 anew=postmnmx(anewn,mint,maxt); %还原数据 y=anew'; 1、BP网络构建 (1)生成BP网络 = net newff PR S S SNl TF TF TFNl BTF BLF PF (,[1 2...],{ 1 2...},,,) R?维矩阵。 PR:由R维的输入样本最小最大值构成的2
S S SNl:各层的神经元个数。 [1 2...] TF TF TFNl:各层的神经元传递函数。 { 1 2...} BTF:训练用函数的名称。 (2)网络训练 = [,,,,,] (,,,,,,) net tr Y E Pf Af train net P T Pi Ai VV TV (3)网络仿真 = [,,,,] (,,,,) Y Pf Af E perf sim net P Pi Ai T {'tansig','purelin'},'trainrp' BP网络的训练函数 训练方法训练函数 梯度下降法traingd 有动量的梯度下降法traingdm 自适应lr梯度下降法traingda 自适应lr动量梯度下降法traingdx 弹性梯度下降法trainrp Fletcher-Reeves共轭梯度法traincgf Ploak-Ribiere共轭梯度法traincgp Powell-Beale共轭梯度法traincgb 量化共轭梯度法trainscg 拟牛顿算法trainbfg 一步正割算法trainoss Levenberg-Marquardt trainlm