大作业1(机电控制系统时域频域分析)
《机电系统控制基础》大作业一
基于MATLAB的机电控制系统响应分析
哈尔滨工业大学
2013年11月4日
1
作业题目
1. 用MATLAB 绘制系统2
()25()()
425
C s s R s s s Φ==
++的单位阶跃响应曲线、单位斜坡响应曲线。
2. 用MATLAB 求系统2
()25
()()425
C s s R s s s Φ==++的单位阶跃响应性能指标:上升时间、峰值时间、调节时间和超调量。
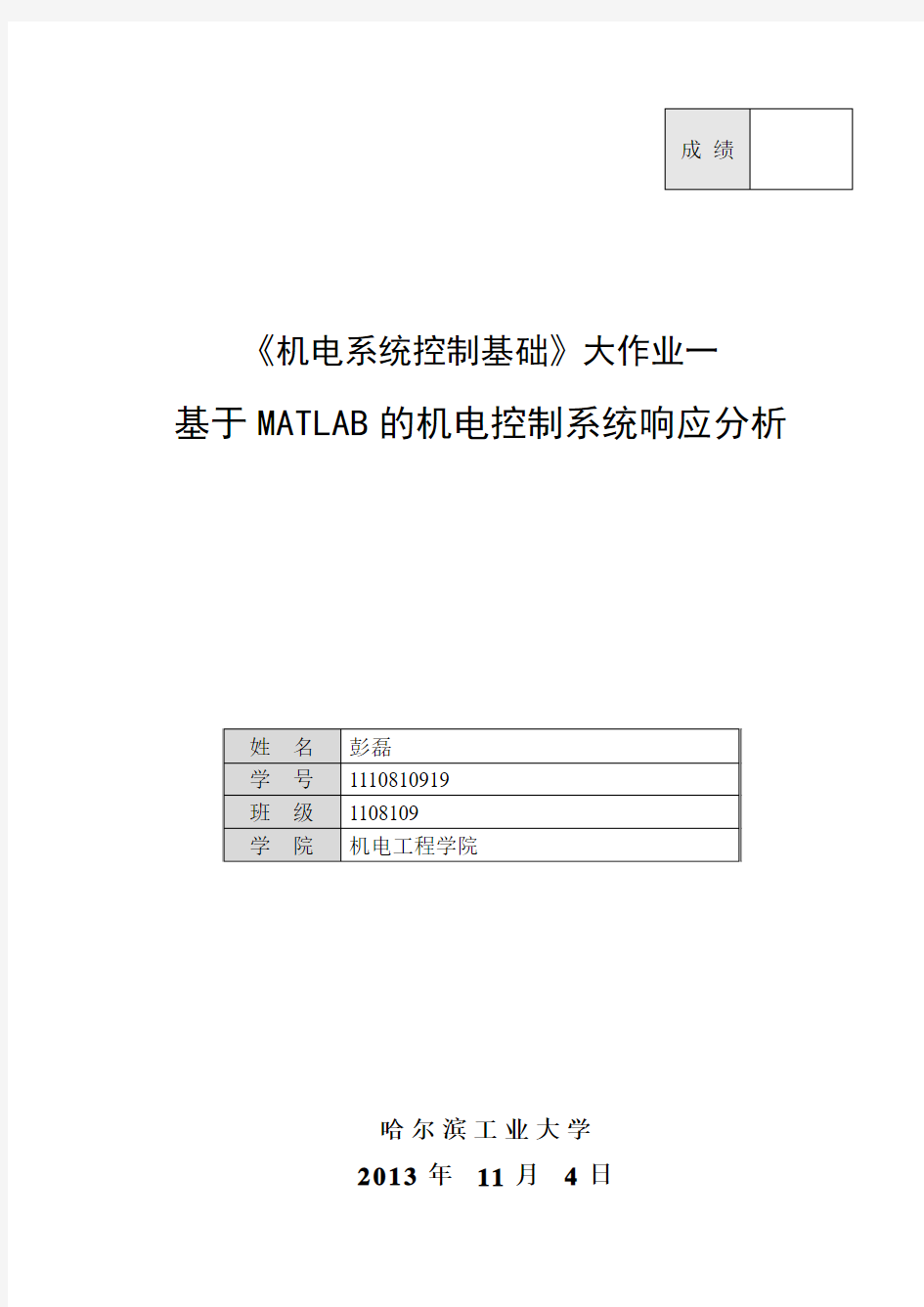
3. 数控直线运动工作平台位置控制示意图如下:
X i
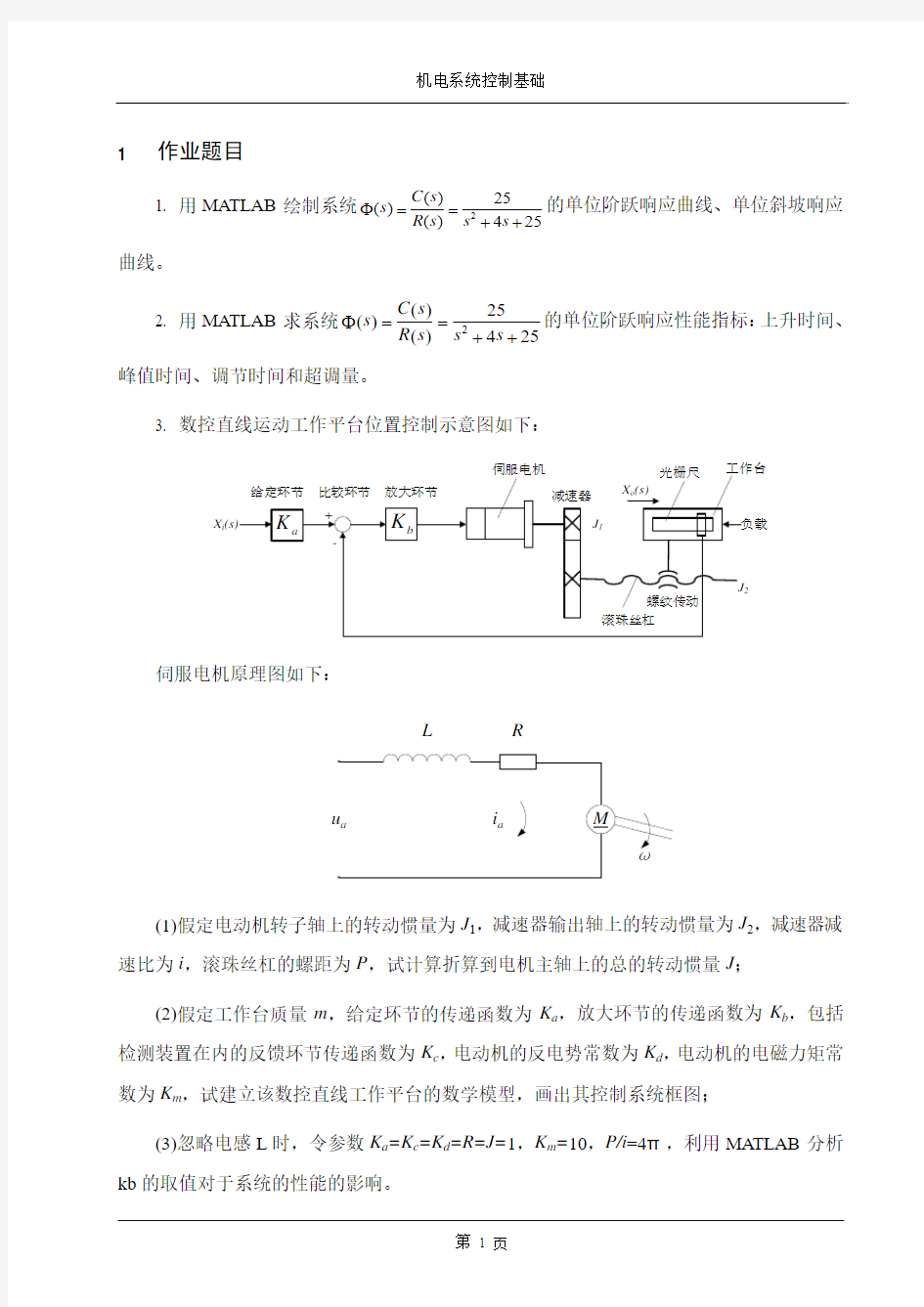
伺服电机原理图如下:
L
R
(1)假定电动机转子轴上的转动惯量为J 1,减速器输出轴上的转动惯量为J 2,减速器减速比为i ,滚珠丝杠的螺距为P ,试计算折算到电机主轴上的总的转动惯量J ;
(2)假定工作台质量m ,给定环节的传递函数为K a ,放大环节的传递函数为K b ,包括检测装置在内的反馈环节传递函数为K c ,电动机的反电势常数为K d ,电动机的电磁力矩常数为K m ,试建立该数控直线工作平台的数学模型,画出其控制系统框图;
(3)忽略电感L 时,令参数K a =K c =K d =R=J=1,K m =10,P/i =4π,利用MATLAB 分析kb 的取值对于系统的性能的影响。
2 题目1
单位脉冲响应曲线
单位阶跃响应曲线
源代码
t=[0:0.01:1.6]; %仿真时间区段和输入
nC=[25];
dR=[1,4,25];
fi=tf(nC,dR); %求系统模型
[y1,T]=impulse(fi,t);
[y2,T]=step(fi,t); %系统响应
plot(T,y1);
xlabel('t(sec)'),ylabel('x(t)'); grid on;
plot(T,y2);
xlabel('t(sec)'),ylabel('x(t)'); grid on; %生成图形
3 题目2
借助Matlab,可得:
ans =
0.4330 0.6860 25.3826 1.0000
即
源代码
t=[0:0.001:1];
yss=1;dta=0.02; %设定仿真时间区段和误差限
nC=[25];
dR=[1,4,25];
fi=tf(nC,dR);
y=step(fi,t); %计算系统的单位阶跃响应
r=1;while y(r) tr=(r-1)*0.001; %上升时间 [ymax,tp]=max(y); tp=(tp-1)*0.001;%峰值时间 mp=(ymax-yss)/yss*100;%最大超调量 s=1001;whiley(s)>1-dta && y(s)<1+dta;s=s-1;end ts=(s-1)*0.001;%调整时间 [tr,tp,mp,ts] 4 题目3 设小齿轮所在的轴为I 轴,大齿轮所在的轴为II 轴。1T ,2T ,3T 分别为总负载,小齿轮 和大齿轮的负载,'2T 为II 轴输入转矩。根据力平衡原理,I ,II 轴的力平衡方程分别为 1 112d T J T dt ω=+ ,'2223d T J T dt ω=+ 1ω2ω分别为小齿轮和大齿轮的角速度. 根据轴II 输入转矩2T 是由轴I 上的负载转矩获得的 ,与且它们的转速成反比,所以有: 22'T iT = 将工作台质量折算到I 轴。在工作台和丝杠间,3T 驱动丝杠使工作台运动。根据动力平衡关系,即丝杠转动一周所做的功等于工作台前进一个导程时其惯性力所做的功,有 32dv T m P dt π?? = ??? v 为工作台位移时的线速度,P 为导程。 又根据传动关系有: 2122P P v i ωωππ== 联立以上各式有: 2 11111 222112d d P d T J m J dt i dt i dt ωωωπ??=++ ??? 由于 1 1d T J dt ω= 故 2 21222J m P J J i i π?? =++ ? ?? (1) X i 参考课本2-25得电动机至工作台的微分方程式: 22 (t)(t)(t)d m m d d d RJ K K K u dt dt θθ+= 取拉普拉斯变换得: (s)(Ts 1) K G s = + 式中 m d RJ T K K = 1d K K = 系统闭环传递函数 11(s)(Ts 1)e a b b b KK K K K G s K K K = ++ 式中 12P K i π= (3) 将已知条件带入得系统传递函数为: 2 20(s)1020b b b K G s s K =++ 由二阶系统的典型传递函数 2 2 2 (s)(s)2o n i n n X X s ωωξω=++ 可知n ω= ξ= K<1.25时,系统为过阻尼系统; 可知:0< b K=1.25时,系统为临界阻尼系统; b K>1.25时,系统为欠阻尼系统。 b 源代码 syms s; t=[0:0.001:2]; kb=0.1;num1=20*kb;den1=[1 10 num1];G1=tf(num1,den1); kb=1;num2=20*kb;den2=[1 10 num2];G2=tf(num2,den2); kb=10;num3=20*kb;den3=[1 10 num3];G3=tf(num3,den3); kb=100;num4=20*kb;den4=[1 10 num4];G4=tf(num4,den4); %写出Kb取不同值时的传递函数 [y1,T]=impulse(G1,t);[y1a,T]=step(G1,t); [y2,T]=impulse(G2,t);[y2a,T]=step(G2,t); [y3,T]=impulse(G3,t);[y3a,T]=step(G3,t); [y4,T]=impulse(G4,t);[y4a,T]=step(G4,t); %建立相应的单位脉冲响应与阶跃响应 figure plot(T,y1,'--',T,y2,'-.',T,y3,'-',T,y4,':','LineWidth',2); legend('Kb=0.1','Kb=1','Kb=10','Kb=100'); title('不同Kb取值下单位脉冲响应'); xlabel('t(sec)');ylabel('x(t)');grid on; figure plot(T,y1a,'--',T,y2a,'-.',T,y3a,'-',T,y4a,':','LineWidth',2); legend('Kb=0.1','Kb=1','Kb=10','Kb=100'); title('不同Kb取值下单位阶跃响应'); xlabel('t(sec)');ylabel('x(t)');grid on; %生成图形 t=[0:0.001:5]; y1=step(G1,t); y2=step(G2,t); y3=step(G3,t); y4=step(G4,t); yss=1;dta=0.02; r=1; while y1(r) r=r+1; end tr1=(r-1)*0.001; %K b=0.1时的上升时间[ymax,tp]=max(y1); tp1=(tp-1)*0.001; %K b=0.1时的峰值时间 mp1=(ymax-yss)/yss; %K b=0.1时的最大超调量 s=5001; while y1(s)>1-dta&y1(s)<1+dta;s=s-1;end ts1=(s-1)*0.001; %Kb=0.1时的调整时间 r=1; while y2(r) r=r+1; end tr2=(r-1)*0.001; %Kb=1时的上升时间 [ymax,tp]=max(y2); tp2=(tp-1)*0.001; %Kb=1时的峰值时间 mp2=(ymax-yss)/yss; %Kb=1时的最大超调量 s=5001; while y2(s)>1-dta&y2(s)<1+dta; s=s-1;end ts2=(s-1)*0.001; %Kb=1时的调整时间 r=1; while y3(r) r=r+1; end tr3=(r-1)*0.001; %Kb=10时的上升时间[ymax,tp]=max(y3); tp3=(tp-1)*0.001; %Kb=10时的峰值时间 mp3=(ymax-yss)/yss; %Kb=10时的最大超调量 s=5001; while y3(s)>1-dta&y3(s)<1+dta;s=s-1;end ts3=(s-1)*0.001;%Kb=10时的调整时间 r=1; while y4(r) r=r+1; end tr4=(r-1)*0.001;%Kb=100时的上升时间[ymax,tp]=max(y4); tp4=(tp-1)*0.001;%Kb=100时的峰值时间 mp4=(ymax-yss)/yss; %Kb=100时的最大超调量s=5001; while y4(s)>1-dta&y4(s)<1+dta;s=s-1;end ts4=(s-1)*0.001;%Kb=100时的调整时间 [tr1,tp1,mp1,ts1] [tr2,tp2,mp2,ts2] [tr3,tp3,mp3,ts3] [tr4,tp4,mp4,ts4] %显示结果 《机电系统控制基础》大作业一 基于MATLAB的机电控制系统响应分析 哈尔滨工业大学 2013年11月4日 1 作业题目 1. 用MATLAB 绘制系统2 ()25()() 425 C s s R s s s Φ== ++的单位阶跃响应曲线、单位斜坡响应曲线。 2. 用MATLAB 求系统2 ()25 ()()425 C s s R s s s Φ==++的单位阶跃响应性能指标:上升时间、峰值时间、调节时间和超调量。 3. 数控直线运动工作平台位置控制示意图如下: X i 伺服电机原理图如下: L R (1)假定电动机转子轴上的转动惯量为J 1,减速器输出轴上的转动惯量为J 2,减速器减速比为i ,滚珠丝杠的螺距为P ,试计算折算到电机主轴上的总的转动惯量J ; (2)假定工作台质量m ,给定环节的传递函数为K a ,放大环节的传递函数为K b ,包括检测装置在内的反馈环节传递函数为K c ,电动机的反电势常数为K d ,电动机的电磁力矩常数为K m ,试建立该数控直线工作平台的数学模型,画出其控制系统框图; (3)忽略电感L 时,令参数K a =K c =K d =R=J=1,K m =10,P/i =4π,利用MATLAB 分析kb 的取值对于系统的性能的影响。 2 题目1 单位脉冲响应曲线 单位阶跃响应曲线 源代码 t=[0:0.01:1.6]; %仿真时间区段和输入 nC=[25]; dR=[1,4,25]; fi=tf(nC,dR); %求系统模型 [y1,T]=impulse(fi,t); [y2,T]=step(fi,t); %系统响应 plot(T,y1); xlabel('t(sec)'),ylabel('x(t)'); grid on; plot(T,y2); xlabel('t(sec)'),ylabel('x(t)'); grid on; %生成图形 3 题目2 借助Matlab,可得: ans = 0.4330 0.6860 25.3826 1.0000 即 《机电控制技术》 课程大作业一 基于MATLAB的直流电机双闭环调速系统的设计与仿真 学院:机电工程学院 专业:机械设计制造及其自动化 班级:1108110 学号:1110811005 姓名:崔晓蒙 2013-06-17 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定电压48V ; 额定电流4A ; 额定转速n=500r/min ; 电枢回路总电阻R=0.8Ω;(本次选为8Ω) 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* * im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。 1.计算电流和转速反馈系数 电流反馈系数:) (A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm ===α 2.电流环的动态校正过程和设计结果 2.1确定时间常数 由题给电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.010 1 14=== , 按电流环小时间常数的近似处理方法,有 s T T T oi s i 0003.00002.00001.0=+=+=∑ 2.2选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= 2.3选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流超调量由题给为%5≤i σ,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ 2.4检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。 1)近似条件一:s ci T 31≤ ω 自动控制原理 大作业 (设计任务书) 姓名: 院系: 班级: 学号: 5. 参考图5 所示的系统。试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60 度,幅值裕度不小于8 分贝。利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。 + 一.人工设计过程 1.计算数据确定校正装置传递函数 为满足设计要求,这里将超前滞后装置的形式选为 ) 1)(() 1)(1()(2 12 1T s T s T s T s K s G c c ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。这样就有 )5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205 ==c K 所以 100=c K 这里我们令100=K ,1=c K ,则为校正系统开环传函) 5)(1(100 )(++= s s s s G 首先绘制未校正系统的Bode 图 由图1可知,增益已调整但尚校正的系统的相角裕度为? 23.6504-,这表明系统是不稳定的。超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为? 60。单个超前滞后装置能够轻易提供这一超前角。 一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定 1 1 sin +-= ββφm 因此选)79.64(20 ==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为 )/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为 1 1001 520 01.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。因此,如果超前滞后校正装置在2=ωrad/s 处提供-10dB 的增益,新的增益穿越频率就是所期望的增益穿越频率。从这一要求出发,可 以画一条斜率为-20dB 且穿过(2rad/s ,-10dB )的直线。这条直线与0dB 和-26dB 线的交点就确定了转角频率。因此,超前部分的转角频率被确定为s rad s rad /10/5.021==ωω和。 因此,超前校正装置的超前部分传函为 )1 1.01 2(201105.0++=++s s s s 综合校正装置的超前与之后部分的传函,可以得到校正装置的传递函数)(S G c 。 即) 1100)(11.0() 15)(12(01.02.0105.0)(++++=++++= s s s s s s s s s G c 校正后系统的开环传递函数为 实验名称: 控制系统的频域分析 实验类型:________________同组学生姓名:__________ 一、实验目的和要求 用计算机辅助分析的方法,掌握频率分析法的三种方法,即Bode 图、Nyquist 曲线、Nichols 图。 二、实验内容和原理 (一)实验原理 1.Bode(波特)图 设已知系统的传递函数模型: 1 1211121)(+-+-+???+++???++=n n n m m m a s a s a b s b s b s H 则系统的频率响应可直接求出: 1 1211121)()()()()(+-+-+???+++???++=n n n m m m a j a j a b j b j b j H ωωωωω MATLAB 中,可利用bode 和dbode 绘制连续和离散系统的Bode 图。 2.Nyquist(奈奎斯特)曲线 Nyquist 曲线是根据开环频率特性在复平面上绘制幅相轨迹,根据开环的Nyquist 线,可判断闭环系统的稳定性。 反馈控制系统稳定的充要条件是,Nyquist 曲线按逆时针包围临界点(-1,j0)p 圈,为开环传递函数位于右半s 一平面的极点数。在MATLAB 中,可利用函数nyquist 和dnyquist 绘出连续和离散系统的乃氏曲线。 3.Nicho1s(尼柯尔斯)图 根据闭环频率特性的幅值和相位可作出Nichols 图,从而可直接得到闭环系统的频率特性。在 MATLAB 中,可利用函数nichols 和dnichols 绘出连续和离散系统的Nichols 图。 (二)实验内容 1.一系统开环传递函数为 ) 2)(5)(1(50)(-++=s s s s H 绘制系统的bode 图,判断闭环系统的稳定性,并画出闭环系统的单位冲击响应。 2.一多环系统 ) 10625.0)(125.0)(185.0(7.16)(+++=s s s s s G 其结构如图所示 试绘制Nyquist 频率曲线和Nichols 图,并判断稳定性。 (三)实验要求 H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称: 机械原理 设计题目: 凸轮机构设计 一.设计题目 设计直动从动件盘形凸轮机构, 1.运动规律(等加速等减速运动) 推程 0450≤≤? 推程 009045≤≤? 2.运动规律(等加速等减速运动) 回程 00200160≤≤? 回程 00240200≤≤? 三.推杆位移、速度、加速度线图及凸轮s d ds -φ 线图 采用VB 编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True '开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single Dim s As Single, q As Single 'i作为静态变量,控制流程;s代表位移;q代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue ElseIf i >= 190 And i <= 230 Then 哈尔滨工业大学工业工程系 机电系统控制技术大作业 班级:1008401班 学号:1100800807 姓名:匡野 日期:2013.7.14 指导教师:崔贤玉成绩: 机电系统控制技术大作业要求 根据PI 、PD 、PID 调节器的频率特性简述其校正的作用;以近似PID 调节器为例详述其校正的过程;最后以下题的指标要求为例详细设计校正网络及参数。 题:某单位反馈系统的开环传递函数为 ()11(1)(1)1060K G s s s s =++ 当输入速度为1rad/s 时,稳态位置误差为 e ss ≤1 126rad ,相位裕度,0()30c γω≥,幅值穿越频率,20c ω≥rad/s 。 (1)根据稳态精度位置误差求出系统开环放大系数 原系统为I型系统,所以 。 做出原系统的图,如图所示。由图可得,错误!未找到引用源。,错误!未找到引用源。,原系统不稳定。 (2)选择校正方式 虽然采用一级超前校正,无法实现如此大的相位超前;若采用两级超前校正,虽可以实现需要的相位超前,但响应速度将远远超出性能指标的要求,带宽过大,抗高频干扰能力变差,同时需要放大器,系统结构复杂,故不宜采用两级超前校正。如采用串联滞后校正,虽 可实现相位裕量的要求,但响应速度又不能满足要求,同时之后校正装置的转折频率必须远离错误!未找到引用源。,则校正装置的时间常数错误!未找到引用源。将大大增加,物理上难以实现,故也不宜采取滞后校正。因此,现拟采用无源串联滞后-超前网络来校正。(3)设计滞后-超前校正装置 首先选择校正后系统的幅值穿越频率错误!未找到引用源。。从原系统的博德图可以看出,当错误!未找到引用源。时,原系统的相角为错误!未找到引用源。。故选择校正后的系统幅值穿越频率错误!未找到引用源。较为方便。这样在错误!未找到引用源。处,所需相位超前角应大于或等于错误!未找到引用源。。当错误!未找到引用源。选定之后,下一步确定滞后-超前校正网络的相位滞后部分打的转折频率错误!未找到引用源。,选错误!未找到引用源。。且取错误!未找到引用源。,则滞后部分的另一转折频率错误!未找到引用源。,故滞后-超前校正网络的滞后部分的传递函数错误!未找到引用源。就可确定为 滞后-超前校正网络网络超前部分可确定如下:因为校正后的幅值穿越频率错误!未找到引用源。,从图1可以找出,未校正系统在错误!未找到引用源。处的对数幅值错误!未找到引用源。。因此,如果滞后-超前校正网络在错误!未找到引用源。处产生错误!未找到引用源。幅值,则校正后的幅值穿越频率即为所求。根据这一要求, 哈工大机械制造大作业 一、零件分析 题目所给的零件是CA6140车床的拨叉。它位于车床变速机构中,主要起换档,使主轴回转运动按照操作者的要求工作,获得所需的速度和扭矩的作用。零件上方的孔与操纵机构相连,二下方的Φ55叉口则是用于与所控制齿轮所在的轴接触,拨动下方的齿轮变速。 其生产纲领为批量生产,且为中批生产。 图1-1 CA6140拨叉零件图 二、零件的工艺分析 零件材料采用HT200,加工性能一般,在铸造毛坯完成后,需进行机械加工,以下是拨叉需要加工的表面以及加工表面之间的位置要求: 1、小头孔Φ25:该加工面为内圆面,其尺寸精度要求为; 2、叉口半圆孔Φ55:该加工面为内圆面,其尺寸精度要求为; 3、拨叉左端面:该加工面为平面,其表面粗糙度要求为,位置精度要求与内圆面圆心距离为; 4、叉口半圆孔两端面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为; 5、拨叉左端槽口,其槽口两侧面内表面为平面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为0.08mm。 6、孔圆柱外端铣削平面,加工表面是一个平面,其表面粗糙度要求为。 三、确定毛坯 1、确定毛坯种类: 零件材料为,查阅机械制造手册,有,考虑零件在机床运行过程中受冲击不大,零件结构又比较简单,故选择铸造毛坯。 图3-1 毛坯模型 2、毛坯特点: (1)性能特点: (2)结构特点:一般多设计为均匀壁厚,对于厚大断面件可采用空心结构。CA6140拨叉厚度较均匀,出现疏松和缩孔的概率低。 (3)铸造工艺参数: 铸件尺寸公差:铸件公称尺寸的两个允许极限尺寸之差成为铸件尺寸公差。成批和大量生产 6011机电一体化系统设计基础大作业 责任教师高秋红 学校:北京一轻高级技术学校学号:111100140 姓名: 一、基础知识题(每题10分,共40分) 1.机电一体化系统的定义?机电一体化产品的分类? 答:机电一体化系统是由机械技术、传感器技术、接口技术、信号变换技术等多种技术进行有机地结合,并综合应用到实际中去的综合技术。 按发展水平分:功能附加型初级系统,功能代替型中级系统,机电融合型高级系统 按应用分:民用机电一体化产品,办公机电一体化产品和产业机电一体化产品 2. 机电一体化系统的基本组成要素?试分析试说明图中的各个部分分别属于机电一体化系统的哪一基本结构要素。 答:按照机电一体化系统的基本结构要素,图示数控机床的各个部分归类如下:(1)控制及信息处理单元:键盘、计算机、显示 (2)测试传感部分:光电编码器、信号处理 (3)能源:电源 (4)驱动部分:功放、电机 (5)执行机构:联轴器、齿轮减速器、丝杠螺母机构、工作台 3. 为什么采用机电一体化技术可以提高系统的精度? 机电一体化技术使机械传动部分减少,因而使机械磨损,配合间隙及受力变形等所引起的误差大大减少,同时由于采用电子技术实现自动检测,控制,补偿和校正因各种干扰因素造成的误差,从而提高精度。 4.简述机电一体化产品设计的工程路线(主要步骤) 机电一体化产品设计的工程路线(主要步骤):拟定产品开发目标和技术规范;收集资料,市场分析,可行性分析和技术经济性分析;总体方案设计;总体方案的评审和评价;详细设计;详细设计方案的评审和评价;试制样机;样机实验,测试;技术评价与审定;小批量生产;试销;正常生产;销售。 二、综合分析设计题(60分) 1.已知电机驱动的三自由度位置控制系统,单个自由度的驱动系统如图所示。要求: (1)说明单自由度驱动系统的两种测量方案;(20分) 要求给出传感器的类型及具体安装位置。 (2)确定整个系统的控制方案、画出控制系统原理图。(40分) 要求写出两种控制方案,方案一使用工业PC机完成系统的控制和方案二使用单片机完成系统的控制。 解:依题意有两种测量方案 1)高速端测量方案: 传感器安装在电机的尾部,通过测量电机的转角实现工作台位移的间接测量。可选用光电编码器式传感器或者磁电式编码器。 3-1 题图3-1所示的阻容网络中,i ()[1()1(30)](V)u t t t =--。当t =4s 时,输出o () u t 值为多 少?当t 为30s 时,输出u o (t )又约为多少? 解:661(s)111 1(s)1110410141o i U sC U RCs s R sC -====+???+++ (4)0.632(V)o u ≈,(30)1(V) o u ≈ 3-2 某系统传递函数为21 ()56 s s s s +Φ= ++,试求其单位脉冲响应函数。 解: 2(s)112 (s)5623 o i X s X s s s s +-==+++++ 其单位脉冲响应函数为 23(t)(e 2e )1() t t x t δ--=-+? 3-3 某网络如图3-3所示,当t ≤0-时,开关与触点1接触;当t ≥0+时,开关与触点2接触。 试求输出响应表达式,并画出输出响应曲线。 1V 题图3-1 题图3-3 解: 1(s)1 1(s)2121()o i R U RCs s sC U RCs s R R sC + +===++++ 01(t)1(2)1()(V)i i i u u u t =+=+-? 1111212 (s)(s)121212 o i s s U U s s s s s ++-= ==-+++ 则 2 1(t)(e 2)1()(V) t o u t - =-? 12 01(t)1(e 2)1()(V) o o o u u u t -=+=+-? 其输出响应曲线如图3-3所示 图3-3 题图3-4 3-4 题图3-4所示系统中,若忽略小的时间常数,可认为 1d 0.5()d y B s x -=?。其中,ΔB 为阀芯位移,单位为cm ,令a =b (ΔB 在堵死油路时为零)。 (1) 试画出系统函数方块图,并求(s)(s) Y X 。 (2) 当i ()[0.51()0.51(4)1(40)]cm x t t t s t s =?+?---时,试求t =0s,4s,8s,40s,400s 时的y (t )值,()B ?∞为多少? (3) 试画出x (t )和y (t )的波形。 解:(1)依题意可画出如图3-4所示的系统函数方块图, 图3-4-1 则 自动控制原理大作业 1.题目 在通常情况下,自动导航小车(AGV )是一种用来搬运物品的自动化设备。大多数AGV 都需要有某种形式的导轨,但迄今为止,还没有完全解决导航系统的驾驶稳定性问题。因此,自动导航小车在行驶过程中有时会出现轻微的“蛇行”现象,这表明导航系统还不稳定。 大多数的AGV 在说明书中都声明其最大行驶速度可以达到1m/s ,但实际速度通常只有0.5m/s ,只有在干扰较小的实验室中,才能达到最高速度。随着速度的增加,要保证小车得稳定和平稳运行将变得越来越困难。 AGV 的导航系统框图如图9所示,其中12=40ms =21ms ττ, 。为使系统响应斜坡输入的稳态误差仅为1%,要求系统的稳态速度误差系数为100。试设计合适的滞后校正网络,试系统的相位裕度达到50o ,并估计校正后系统的超调量及峰值时间。 ()R s () Y s 2.分析与校正主要过程 2.1确定开环放大倍数K 100) 1021.0)(104.0(lim )(lim =++==s s s sK s sG K v (s →0) 解得K=100 ) 1021.0)(104.0(100++=s s s G s 2.2分析未校正系统的频域特性 根据Bode 图: 穿越频率s rad c /2.49=ω 相位裕度?---=?-?--=99.18)2.49021.0(arctan )2.4904.0(arctan 9018011γ 未校正系统频率特性曲线 由图可知实际穿越频率为s rad c /5.34=ω 2.3根据相角裕度的要求选择校正后的穿越频率1c ω 现在进行计算: ???--=+=---55550)021.0(arctan )04.0(arctan 901801111c c ωω 则取s rad c /101=ω可满足要求 2.4确定滞后校正网络的校正函数 由于1120 1~101c ωω)(= 因此取s rad c /1101 11== ωω)(,则由Bode 图可以列出 目录 本科生课程论文 ........................................................................... 错误!未定义书签。 一、仿真题目 (2) 单闭环直流调速系统仿真 (2) 二、仿真过程 (2) 2.1 仿真总图 (2) 2.2 PWM模块 (3) 2.3 电机模块 (3) 2.4 仿真结果 (4) 三、心得体会 (10) 一、仿真题目 单闭环直流调速系统仿真 直流电动机:型号为Z4-132-1,额定电压400N U =V ,额定电流52.2dN I =A ,额定转速为2610 r/min ,反电动势系数e C =0.1459 V ?min/r ,允许过载倍数λ=1.5;PWM 变换器开关频率:8KHz ,放大系数:s K =107.5;(538/5=107.5),直流母线电压为538V 。 电枢回路总电阻: 0.368R =Ω; 时间常数:电枢回路电磁时间常数l T =0.0144s ,电力拖动系统机电时间常数 m T =0.18s ;转速反馈系数0.00383min/V s =?α(N n V /10≈); 对应额定转速时的给定电压V U n 10* =。 ● 在matlab/simulink 仿真平台下搭建系统仿真模型。其中PWM 变换器利用给 出的PWM 控制器模块和simulink/Powersystem 工具包中的功率封装模块搭建,不能直接利用传递函数建模。比例积分调节器进行积分和输出限幅,输出限幅值为+5和-5。 ● 给出采用比例调节器(7p K =)、比例积分调节器时(7p K =,1107 =τ )空载起动 到额定转速的转速波形,并就稳态静差和动态性能进行对比,分析说明原因。 ● 给出采用比例积分调节器时(7p K =,1107 =τ )的转速、电流、电枢电压波形, 分析空载起动过程中电流过流原因,请给出解决过流问题的方法。 ● 在4s 突加40%额定负载,给出仿真波形(包括转速、电流、转速调节器输 出),并加载过程中波形变化加以分析,比较加载前后稳态转速,说明原因。 二、仿真过程 2.1 仿真总图 自动调节系统频域分析 班级11081801 学号1108180135 姓名王佳炜 日期2014.1.5 线性系统的频域分析 一、实验目的 1.掌握用MATLAB 语句绘制各种频域曲线。 2.掌握控制系统的频域分析方法。 二、实验内容 1.典型二阶系统 2 2 22)(n n n s s s G ωζωω++= 绘制出6=n ω,1.0=ζ,0.3,0.5,0.8,2的bode 图,记录并分析ζ对系统bode 图的影响。 解: 程序如下: num=[0 0 36];den1=[1 1.2 36];den2=[1 3.6 36]; den3=[1 6 36];den4=[1 9.6 36];den5=[1 24 36]; w=logspace(-2,3,100); bode(num,den1,w) grid hold bode(num,den2,w) bode(num,den3,w) bode(num,den4,w) bode(num,den5,w) -100-80-60-40-200 20M a g n i t u d e (d B )10 -2 10 -1 10 10 1 10 2 10 3 P h a s e (d e g ) Bode Diagram Frequency (rad/sec) 分析:随着.0=ζ的增大 ,伯德图在穿越频率处的尖峰越明显,此处用渐近线代替时误差越大. 2.系统的开环传递函数为 ) 5)(15(10 )(2 +-= s s s s G ) 106)(15() 1(8)(22++++= s s s s s s G ) 11.0)(105.0)(102.0() 13/(4)(++++= s s s s s s G 绘制系统的Nyquist 曲线、Bode 图,说明系统的稳定性,并通过绘制阶跃响应曲线验证。 解: 程序如下 奈氏曲线: (1) num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5]))); w=logspace(-1,1,100); nyquist(num1,den1,w) 第5章 用MATLAB 进行控制系统频域分析 一、基于MATLAB 的线性系统的频域分析基本知识 (1)频率特性函数)(ωj G 。 设线性系统传递函数为: n n n n m m m m a s a s a s a b s b s b s b s G ++???++++???++=---1101110)( 则频率特性函数为: n n n n m m m m a j a j a j a b j b j b j b jw G ++???++++???++=---)()()()()()()(1101110ωωωωωω 由下面的MATLAB 语句可直接求出G(jw)。 i=sqrt(-1) % 求取-1的平方根 GW=polyval(num ,i*w)./polyval(den ,i*w) 其中(num ,den )为系统的传递函数模型。而w 为频率点构成的向量,点右除(./)运算符表示操作元素点对点的运算。从数值运算的角度来看,上述算法在系统的极点附近精度不会很理想,甚至出现无穷大值,运算结果是一系列复数返回到变量GW 中。 (2)用MATLAB 作奈魁斯特图。 控制系统工具箱中提供了一个MATLAB 函数nyquist( ),该函数可以用来直接求解Nyquist 阵列或绘制奈氏图。当命令中不包含左端返回变量时,nyquist ()函数仅在屏幕上产生奈氏图,命令调用格式为: nyquist(num,den) nyquist(num,den,w) 或者 nyquist(G) nyquist(G,w) 该命令将画出下列开环系统传递函数的奈氏曲线: ) () ()(s den s num s G = 如果用户给出频率向量w,则w 包含了要分析的以弧度/秒表示的诸频率点。在这些频率点上,将对系统的频率响应进行计算,若没有指定的w 向量,则该函数自动选择频率向量进行计算。 w 包含了用户要分析的以弧度/秒表示的诸频率点,MATLAB 会自动计算这些点的频率响应。 当命令中包含了左端的返回变量时,即: [re,im,w]=nyquist(G) 或 自动控制原理 大作业 (设计任务书) 姓名: 院系: 班级: 学号: 5、 参考图 5 所示的系统。试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。利用MATLAB 画出 已校正系统的单位阶跃与单位斜坡响应曲线。 + 一.人工设计过程 1、计算数据确定校正装置传递函数 为满足设计要求,这里将超前滞后装置的形式选为 ) 1)(()1)(1()(2 12 1T s T s T s T s K s G c c ββ++++ = 于就是,校正后系统的开环传递函数为)()(s G s G c 。这样就有 )5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205 ==c K 所以 100=c K 这里我们令100=K ,1=c K ,则为校正系统开环传函) 5)(1(100 )(++=s s s s G 首先绘制未校正系统的Bode 图 由图1可知,增益已调整但尚校正的系统的相角裕度为? 23.6504-,这表明系统就是不稳定的。超前滞后校正装置设计的下一步就是选择一个新的增益穿越频率。由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s,将新的增益穿越频率仍选为2rad/s,但要求2=ωrad/s 处的超前相角为? 60。单个超前滞后装置能够轻易提供这一超前角。 一旦选定增益频率为2rad/s,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。要获得另一个转角频率)/(12T βω=,需要知道β的数值, 《机械制造装备设计》课程大作 业 院(系)外国语学院 专业英语-机械设计制造及 自动化 姓名李网 学号1121510202 班号1215102 任课教师张庆春 完成日期2015.5 哈尔滨工业大学机电工程学院 2015年5月 题目:无丝杠车床主传动系统运动和动力设计 设计要求: 序号机床主参数公比φ最低转速级数Z 功率(kW)2 最大加工直径φ320mm无丝杠车床 1.41 30 12 3 目录 一、运动设计 (1) 1 确定极限转速 (1) 2 确定公比 (1) 3 求出主轴转速级数 (1) 4 确定结构式 (1) 5 绘制转速图 (1) 6 绘制传动系统图 (3) 7 确定变速组齿轮传动副的齿数 (3) 8 校核主轴转速误差 (4) 二、动力设计 (5) 1 传动轴的直径确定 (5) 2 齿轮模数的初步计算 (6) 参考文献 (8) 一、运动设计 1、 确定极限转速 根据设计参数,主轴最低转速为31.5r/min ,级数为12,且公比φ=1.41。于是可以得到主轴的转速分别 30, 42.5, 60, 85, 118, 170, 236, 335, 475, 670, 950, 1320 r/min ,则转速的调整范围max min 1320 4430 n n R n ===。 2、 确定公比φ 根据设计数据,公比φ=1.41。 3、 求出主轴转速级数Z 根据设计数据,转速级数Z=12。 4、 确定结构式 按照主变速传动系设计的一般原则,选用结构式为13612322=??的传动方案。其最后扩大组的变速范围6(21)3 1.2688R ?-==≤,符合要求,其它变速组的变速范围也一定符合要求。 5、 绘制转速图 (1)选定电动机 根据设计要求,机床功率为3KW ,可以选用Y100L2-4,其同步转速为 1500r/min ,满载转速为1420r/min ,额定功率3KW 。 (2)分配总降速传动比 总降速传动比为min 30 0.02111420 d n u n ∏= ==,又电动机转速1440/min d n r = 不在所要求标准转速数列当中,因而需要用带轮传动。 (3)确定传动轴的轴数 轴数=变速组数+定比传动副数=3+1=4。 《机电系统控制器与应用》 大作业三 (2015年春季学期) 题目:小彩灯循环闪烁控制 姓名:韩威 学号:1120810613 班级:1208106 专业:机械设计制造及其自动化报告提交日期:2015.5.2 哈尔滨工业大学 大作业要求 1.请根据课堂内容,自己选择灯闪烁方式,题目自拟,但拒绝雷同 和抄袭,否则均为零分; 2.作业最后应包含自己的心得、体会或意见、建议等; 3.统一用该模板撰写,每份报告字数不少于2000字,上限不限; 4.正文格式:小四号字体,行距为1.25倍行距; 5.用A4纸双面打印;左侧装订,1枚钉; 6.需同时提交打印稿和电子文档予以存档,电子文档由班长收齐, 统一发送至:chenzhg@https://www.360docs.net/doc/085107364.html,。 7.此页不得删除。 评语: 教师签名: 年月日 大作业题目:小彩灯循环闪烁控制 一、功能 利用PLC控制四个灯的循环闪烁。四个输出端控制四个彩灯,当开关1被按下时从第一个开始灯循环闪烁,每隔一定的时间下一个灯亮保持同样的时间接着下一个灯亮,且每次只有一个灯亮。当按下另一个开关2后所有的灯都熄灭。当接通开关1后又重新开始循环。 二、i/o分配 三、plc接线图 五、梯形图 六、调试结果及分析 结果: 利用PLC 的Q0.0 到Q0.3 四个输出端控制四个彩灯,每隔一秒亮一个并循环。当接通I0.0后所有的灯都熄灭。当接通I0.1后又重新从Q0.0开始循环。 分析: 上电后sm0.0一直保持接通。所以t37进行延时计时,延时到后t38启动计时,t38计时到后t38常闭触点断开所以t37断开计时,t37常开触点恢复为常开所以t38 也断开计时。此时t38 的常闭触点恢复为常闭所以t37 又重新计时,同时计数器C0开始计数一次。如此的反复计数。 当计数为1时,Q0.0接通。计数器计数为2是Q0.1接通……如此下去当计数器计数到4时Q0.3接通。当计数器计到5时时计数器C0 清零。当按下在线控制面板上的I0.0f(即I0.0)接通,此时计数器,和Q0.0~Q0.3都清零,即没有一个灯亮。当按下在线控制面板上的I0.1f(即I0.1接通)此时计数器开始重新计数,灯又开始重新亮。 体会: PLC具有很高的可靠性,通常的平均无故障时间都在30万小时以上编程能力强,可以将模糊化、模糊决策和解模糊都方便地用软件来实现。抗干扰能力强,目前空中各种电磁干扰日益严重,为了保证彩灯控制的可靠稳定,随着社会市场经济的不断繁荣和发展,各种装饰彩灯、广告彩灯越来越多地出现在城市中。彩灯成为不可缺少的一道景观。小型的彩灯多为采用霓虹灯管做成各种各样和各种色彩的灯管,或是以日光灯、白炽灯作为光源,另配大型广告语、宣传画来达到效果。这些灯的控制设备多为数字电路。而在现代生活中,大型楼宇的轮廓装饰或大型晚会的灯光布景,由于其变化多、功率大,数字电路则不能胜任。PLC在不同变化类型的彩灯控制中的应用,灯的亮灭、闪烁时间通过PLC来达到控制要求。在彩灯的应用中,装饰灯、广告灯、布景灯的变化多种多样,但就其工作模式,可分为三种主要类型:长明灯、流水灯及变幻灯。长明灯的特点是主要灯投入工作,负载即长期接通,一般在彩灯中用以照明或衬托底色,没有频繁的动态切换过程,因此可用开关直接控制,不需经过PLC控制。流水灯负载变换频率高,变换速度快,是人有眼花缭乱之感,分为多灯流动、单灯流动等情形。变幻灯则包括字形变化、色彩变化、位置变化等,其主要特点是在整个工作过程中周期性的花样变化,但频率不高。 流水灯及变幻灯均适宜采用PLC控制。随着科学技术的日新月异,自动化程度要求越来越高,原有的彩灯装置远远不能满足当前高度自动化的需要。可编程控制器彩灯控制系统集成自动控制技术、计量技术、新传感器技术、计算机管理技术于一体的机电一体化产品;充分利用计算机技术对生产过程进行集中监视、控制管理和分散控制;充分吸收了分散式控制系统和集中控制系统的优点,采用标准化、模块化、系统化设计,配置灵活、组态方便。 实验三·线性系统的频域分析 一、实验目的 1.掌握用MATLAB 语句绘制各种频域曲线。 2.掌握控制系统的频域分析方法。 二、实验内容 1.典型二阶系统 2 22 ()2n n n G s s s ωζωω=++ 绘制出6n ω=,0.1ζ =,0.3,0.5,0.8,2的bode 图,记录并分析ζ对系统bode 图的影响。 2.系统的开环传递函数为 210 ()(51)(5)G s s s s =-+ 228(1) ()(15)(610) s G s s s s s += +++ 4(/31) ()(0.021)(0.051)(0.11) s G s s s s s += +++ 绘制系统的Nyquist 曲线、Bode 图和Nichols 图,说明系统的稳定性,并通过绘制阶跃响应曲线验证。 3.已知系统的开环传递函数为21()(0.11) s G s s s += +。求系统的开环截止频率 穿越频率、幅值裕度和相位裕度。应用频率稳定判据判定系统的稳定性。 三、实验内容及分析 1. 系统1:2 22 ()2n n n G s s s ωζωω=++中6n ω=,(1)0.1ζ=时 Matlab 文本如下: num=[36 0 0]; den=[1 1.2 36]; w=logspace(-2,3,100); bode(num,den,w) Grid 得到图像: 同理,得到其他值情况下的波特图:ξ=0.3时 ξ=0.5时 ξ=0.8时 ξ=2时 从上面的图像中可以看出:随着ξ的不断增大,波特图中震荡的部分变得越来越平滑。而且,对幅频特性曲线来说,其上升的斜率越来越慢;对相频特性曲线来说,下降的幅度也在变缓。 2. 开环传递函数1:210 ()(51)(5) G s s s s = -+ 奈奎斯特图函数及图像如下: num=[0 10]; den=[conv([5,-1],[1,5]),0,0]; [z,p,k]=tf2zp(num,den); p 控制系统时域与频域性能指标的联系 经典控制理论中,系统分析与校正方法一般有时域法、复域法、频域法。时域响应法是一种直接法,它以传递函数为系统的数学模型,以拉氏变换为数学工具,直接可以求出变量的解析解。这种方法虽然直观,分析时域性能十分有用,但是方法的应用需要两个前提,一是必须已知控制系统的闭环传递函数,另外系统的阶次不能很高。 如果系统的开环传递函数未知,或者系统的阶次较高,就需采用频域分析法。频域分析法不仅是一种通过开环传递函数研究系统闭环传递函数性能的分析方法,而且当系统的数学模型未知时,还可以通过实验的方法建立。此外,大量丰富的图形方法使得频域分析法分析高阶系统时,分析的复杂性并不随阶次的增加而显著增加。 在进行控制系统分析时,可以根据实际情况,针对不同数学模型选用最简洁、最合适的方法,从而使用相应的分析方法,达到预期的实验目的。 系统的时域性能指标与频域性能指标有着很大的关系,研究其内在联系在工程中有着很大的意义。 一、系统的时域性能指标 延迟时间t d 阶跃响应第一次达到终值h (∞)的50%所需的时间 上升时间 t r 阶跃响应从终值的10%上升到终值的90%所需的时间;对有振荡的系 统,也可定义为从0到第一次达到终值所需的时间 峰值时间t p 阶跃响应越过终值h (∞)达到第一个峰值所需的时间 调节时间 t s 阶跃响应到达并保持在终值h (∞)的±5%误差带内所需的最短时间 超调量%σ 峰值h( t p )超出终值h (∞)的百分比,即 %σ= () ()() ∞∞-h h h t p ?100% 二、系统频率特性的性能指标 采用频域方法进行线性控制系统设计时,时域内采用的诸如超调量,调整时间等描述系统性能的指标不能直接使用,需要在频域内定义频域性能指标。 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定转速48V ; 额定电流4A ; 额定转速=500r/min ; 电枢回路总电阻8=R Ω; 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* *im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。 1.计算电流和转速反馈系数 电流反馈系数:)(A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm === α 2.电流环的设计 (1)确定时间常数 电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.01000 1011=?== , 按电流环小时间常数的近似处理方法,取 s T T T oi s i 0003.00002.00001.0=+=+=∑ (2)选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= (3)选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流环按超调量%5≤i σ考虑,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ (4)检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。大作业1(机电控制系统时域频域分析)
哈工大机电控制技术 大作业1
哈工大自动控制原理 大作业
控制系统的频域分析实验报告
哈工大机械原理大作业 凸轮机构设计 题
机电系统控制技术大作业
哈工大机械制造大作业
机电一体化系统设计大作业
哈工大机电系统控制第三章答案-
哈工大自动控制原理大作业
运动控制 大作业 单闭环直流调速系统仿真 直流电机Z
自动控制原理-线性系统的频域分析实验报告
第5章_用MATLAB进行控制系统频域分析
哈工大自动控制原理 大作业
哈工大机械装备制造大作业完整版
《机电系统控制器与应用》大作业
线性系统的频域分析-自动控制
控制系统时域与频域性能指标的联系
哈工大机电控制系统 大作业一