现代控制理论课后习题答案

(完整word版)现代控制理论基础试卷及答案,推荐文档
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: 一.填空题(共27分,每空1.5分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T为周期进 行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为__________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义能量, V(x, t)称为___________。 8.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函数的所有 极点具有______。 9.控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的 _________、_________和较强的_________。 10.所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 11.实际的物理系统中,控制向量总是受到限制的,只能在r维控制空间中某一个控制域内取值,这个控制域称为_______。 12._________和_________是两个相并行的求解最优控制问题的重要方法。二.判断题(共20分,每空2分) 1.一个系统,状态变量的数目和选取都是惟一的。(×) 2.传递函数矩阵的描述与状态变量选择无关。(√) 3.状态方程是矩阵代数方程,输出方程是矩阵微分方程。(×) 4.对于任意的初始状态) ( t x和输入向量)(t u,系统状态方程的解存在并且惟一。(√) 5.传递函数矩阵也能描述系统方程中能控不能观测部分的特性。(×) 6.BIBO 稳定的系统是平衡状态渐近稳定。(×) 7.一个系统能正常工作,稳定性是最基本的要求。(√) 8.如果系统的状态不能测得,只要系统能观测,可以采用状态观测器实现状
现代控制理论习题解答..
《现代控制理论》第1章习题解答 1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为: x Ax Bu y Cx Du =+=+ 线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,而对线性时变系统,其系数矩阵A ,B ,C 和 D 中有时变的元素。线性定常系统在物理上代表结构和参数都不随时间变化的一类系统, 而线性时变系统的参数则随时间的变化而变化。 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下: 1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点? 答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。对于n 阶传递函数 121210 1110 ()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++, 分别有 ⑴ 能控标准型: []012 101 210100000100000101n n n x x u a a a a y b b b b x du ---????? ???????????? ???=+?? ???????? ? ?????----???? ? =+??
⑵ 能观标准型: []0011221100010 00 100010 1n n n b a b a x a x u b a b y x du ---?-?? ????? ??-????? ?????=-+???? ? ????? ??????-???? ?=+?? ⑶ 对角线标准型: []1212 001001001n n p p x x u p y c c c x du ????? ??????? ???=+?????? ????? ??????=+? 式中的12,, ,n p p p 和12,,,n c c c 可由下式给出, 12121012 1 11012 ()n n n n n n n n n b s b s b s b c c c G s d d s a s a s a s p s p s p ------++++=+=+++ +++++--- 能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。 能观标准型的特点:能控标准型的对偶形式。 对角线标准型的特点:状态矩阵是对角型矩阵。 1.4 对于同一个系统,状态变量的选择是否惟一? 答:对于同一个系统,状态变量的选择不是惟一的,状态变量的不同选择导致不同的状态空间模型。 1.5 单输入单输出系统的传递函数在什么情况下,其状态空间实现中的直接转移项D 不等 于零,其参数如何确定? 答: 当传递函数)(s G 的分母与分子的阶次相同时,其状态空间实现中的直接转移项D 不等于零。 转移项D 的确定:化简下述分母与分子阶次相同的传递函数 1110 111)(a s a s a s b s b s b s b s G n n n n n n n ++++++++=---- 可得: d a s a s a s c s c s c s G n n n n n ++++++++=----0 11 10 111)( 由此得到的d 就是状态空间实现中的直接转移项D 。 1.6 在例1. 2.2处理一般传递函数的状态空间实现过程中,采用了如图1.12的串联分解,试 问:若将图1.12中的两个环节前后调换,则对结果有何影响?
现代控制理论课后习题答案
绪论 为了帮助大家在期末复习中能更全面地掌握书中知识点,并且在以后参加考研考博考试直到工作中,为大家提供一个理论参考依据,我们11级自动化二班的同学们在王整风教授的带领下合力编写了这本《现代控制理论习题集》(刘豹第三版),希望大家好好利用这本辅助工具。 根据老师要求,本次任务分组化,责任到个人。我们班整体分为五大组,每组负责整理一章习题,每个人的任务由组长具体分配,一个人大概分1~2道题,每个人任务虽然不算多,但也给同学们提出了要求:1.写清题号,抄题,画图(用CAD或word画)。2.题解详略得当,老师要求的步骤必须写上。3.遇到一题多解,要尽量写出多种方法。 本习题集贯穿全书,为大家展示了控制理论的基础、性质和控制一个动态系统的四个基本步骤,即建模、系统辨识、信号处理、综合控制输入。我们紧贴原课本,强调运用统一、联系的方法分析处理每一道题,将各章节的知识点都有机地整合在一起,力争做到了对控制理论概念阐述明确,给每道题的解析赋予了较强的物理概念及工程背景。在课后题中出现的本章节重难点部分,我们加上了必要的文字和图例说明,让读者感觉每一题都思路清晰,简单明了,由于我们给习题配以多种解法,更有助于发散大家的思维,做到举一反三!
这本书是由11级自动化二班《现代控制理论》授课老师王整风教授全程监管,魏琳琳同学负责分组和发布任务书,由五个小组组组长李卓钰、程俊辉、林玉松、王亚楠、张宝峰负责自己章节的初步审核,然后汇总到胡玉皓同学那里,并由他做最后的总审核工作,绪论是段培龙同学和付博同学共同编写的。 本书耗时两周,在同学的共同努力下完成,是二班大家庭里又一份智慧和努力的结晶,望大家能够合理使用,如发现错误请及时通知,欢迎大家的批评指正! 2014年6月2日
现代控制理论基础考试题A卷及答案
即 112442k g k f M L M ML θθθ??=-+++ ??? && 212 44k k g M M L θθθ??=-+ ??? && (2)定义状态变量 11x θ=,21x θ=&,32 x θ=,42x θ=& 则 一.(本题满分10分) 如图所示为一个摆杆系统,两摆杆长度均为L ,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M )视为质点,两摆杆中点处连接一条弹簧,1θ与2θ分别为两摆杆与竖直方向的夹角。当12θθ=时,弹簧没有伸长和压缩。水平向右的外力()f t 作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小,满足近似式sin θθ=,cos 1θ=。 (1)写出系统的运动微分方程; (2)写出系统的状态方程。 【解】 (1)对左边的质量块,有 ()2111211 cos sin sin cos sin 222 L L L ML f k MgL θθθθθθ=?-?-?-&& 对右边的质量块,有 ()221222 sin sin cos sin 22 L L ML k MgL θθθθθ=?-?-&& 在位移足够小的条件下,近似写成: ()1121 24f kL ML Mg θθθθ=---&& ()2122 4kL ML Mg θθθθ=--&&
2 / 7 1221 334413 44244x x k g k f x x x M L M ML x x k k g x x x M M L =?? ???=-+++ ???? ? =????=-+? ????? &&&& 或写成 11 223 34401 000014420001000044x x k g k x x M L M f ML x x x x k k g M M L ? ? ?? ?????????? ??-+???? ???????????=+???? ????? ??????????????????? ????-+?? ? ? ?????? ? &&&& 二.(本题满分10分) 设一个线性定常系统的状态方程为=x Ax &,其中22R ?∈A 。 若1(0)1?? =??-??x 时,状态响应为22()t t e t e --??=??-?? x ;2(0)1??=??-??x 时,状态响应为 2()t t e t e --?? =??-?? x 。试求当1(0)3??=????x 时的状态响应()t x 。 【解答】系统的状态转移矩阵为()t t e =A Φ,根据题意有 221()1t t t e t e e --????==????--???? A x 22()1t t t e t e e --????==????--???? A x 合并得 2212211t t t t t e e e e e ----????=????----?? ??A 求得状态转移矩阵为 1 22221212221111t t t t t t t t t e e e e e e e e e -----------?????? ?? ==????????------???? ????A 22222222t t t t t t t t e e e e e e e e --------?? -+-+=??--??
(精选)现代控制理论作业题答案
第九章 线性系统的状态空间分析与综合 9-1 设系统的微分方程为 u x x x =++23&&& 其中u 为输入量,x 为输出量。 ⑴ 设状态变量x x =1,x x &=2,试列写动态方程; ⑵ 设状态变换211x x x +=,2122x x x --=,试确定变换矩阵T 及变换后的动态方程。 解:⑴ u x x x x ??????+????????????--=???? ??1032102121&&,[]??????=2101x x y ; ⑵ ??????=??????2121x x T x x ,??????--=2111T ;?? ????--=-11121 T ;AT T A 1-=,B T B 1-=,CT C =; 得,??????--=2111T ;u x x x x ??????-+??????????? ?-=??????1110012121&&,[]??????=2111x x y 。 9-2 设系统的微分方程为 u y y y y 66116=+++&&&&&& 其中u 、y 分别系统为输入、输出量。试列写可控标准型(即A 为友矩阵)及可观标准型(即A 为友矩 阵转置)状态空间表达式,并画出状态变量图。 解:可控标准型和可观标准型状态空间表达式依次为, []x y u x x 00610061161 00010=??????????+??????????---=&;[]x y u x x 100 006610 1101600=???? ? ?????+??????? ???---=&; 可控标准型和可观标准型的状态变量图依次为, 9-3 已知系统结构图如图所示,其状态变量为1x 、2x 、3x 。试求动态方程,并画出状态变量图。 解:由图中信号关系得,31x x =&,u x x x 232212+--=&,32332x x x -=&,1x y =。动态方程为 u x x ?? ?? ? ?????+??????????---=020*********&,[]x y 001;
现代控制理论课后习题答案
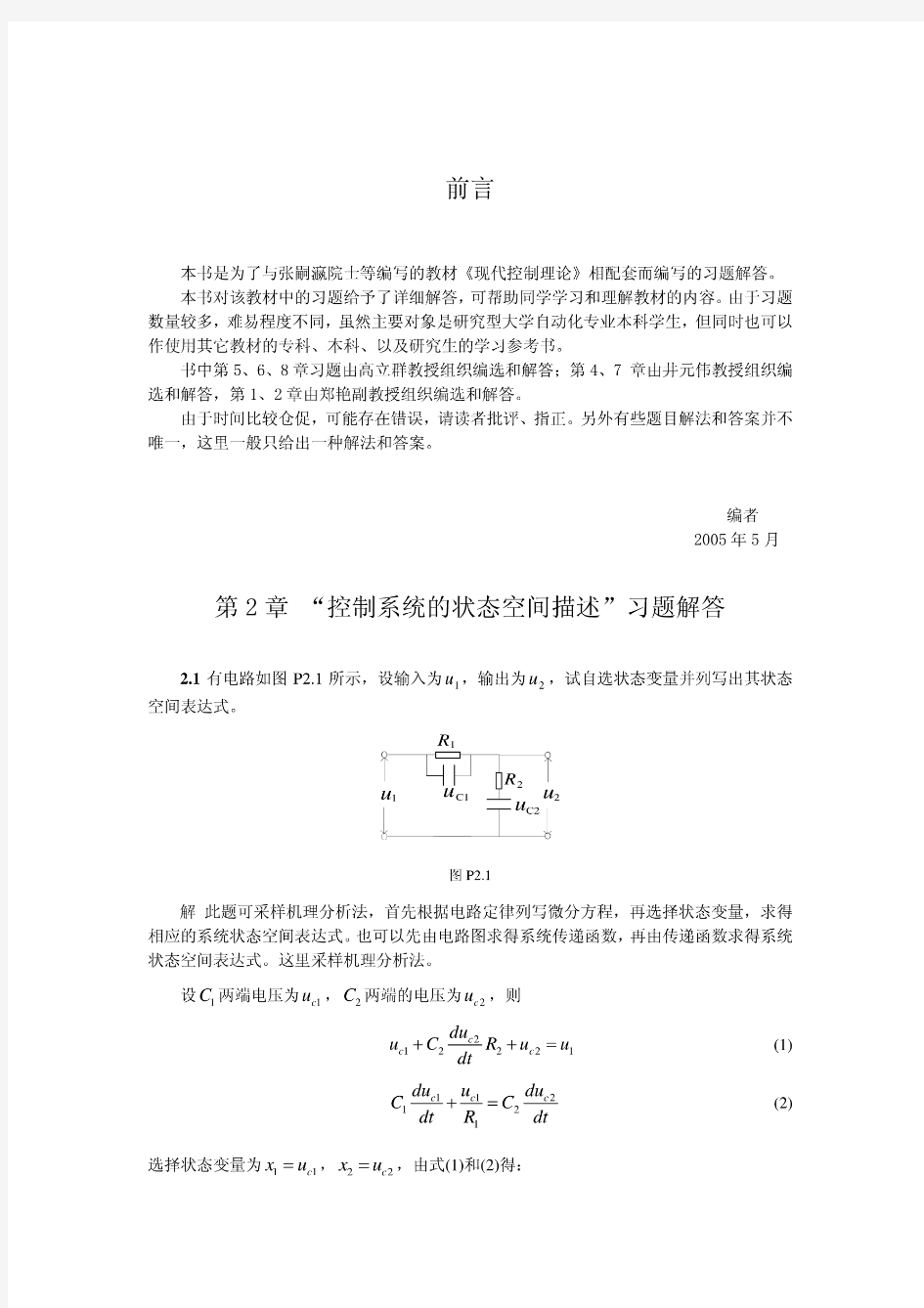
前言 本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。 本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。 书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。 由于时间比较仓促,可能存在错误,请读者批评、指正。另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。 编者 2005年5月 第2章 “控制系统的状态空间描述”习题解答 2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。 图P2.1 解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。这里采样机理分析法。 设1C 两端电压为1c u ,2C 两端的电压为2c u ,则 2 12221c c c du u C R u u dt ++= (1) 1121 21c c c du u du C C dt R dt += (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:
1121121121212111 c c c du R R C u u u dt R R C R C R C +=--+ 2121222222 111c c c du u u u dt R C R C R C =--+ 状态空间表达式为: 1211 1211212121 212 1222222 21111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +?=--+?? ? =--+?? ?==-?? && 即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +???? -???? ????????=+????????????--??????? ? && []11210x y u x ?? =-+???? 2.2 建立图P22所示系统的状态空间表达式。 1 图P2.2 解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1 dy dt ,24dy x dt =。 根据牛顿定律对1M 有: 211311 () d x x M x Kx B dt -=--&
现代控制理论基础考试题B卷及答案
-----好资料学习 分)一.(本题满分10请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状L态变量的设置如图所示,系统的输出变量为流经电感的电流强度。2
【解答】根据基尔霍夫定律得:uLx?Rx?x??3111 ?x?Lx?Rx?3222 ?xx?Cx??213 1R1?ux?x??x?? 311LLL ?1111R?x??x?x?232x?y,输出方程为改写为LL ?222?11x?x?x? 123CC? 写成矩阵形式为 更多精品文档. 学习-----好资料 ?R1??1??0?????LL?????11Lxx??????111 ?1R??????u?x?0?x0?????????22LL ?????22????0xx???????33??11
???0????? ?CC???x???1?????x1y?00???2???x???3 10分)二.(本题满分单输入单输出离散时间系统的差分方程 为)k2r(r?3y(k)?(k?1)??y(k2)?5y(k?1) 回答下列问题:)求系统的脉冲传递函数;(1 )分析系统的稳定性; (2)y?(kx(k))r(kx(k)?x(k?1)?,,(3)取状态变量为求系统的状态空间表达式;112(4)分析系统的状态能观性。【解答】z变换有:1()在零初始条件下进行????2 )z?2)?zRz(?5z?3zY(2?(Yz)z?系统的脉冲传递函数: 23R(z)z?5z?(2)系统的特征方程为20?5?z?3zD(z)? 1z?0.7?z?4.3??z,,所以离散系统不稳定。,特征根为211)(k1)?rx)?y(k)x(k)?(k?(xk 3)由,,可以得到(1211)(k??(k?1)y(k?2)?r?kx(?1)?x(k2)?r12由已知 得)?1)?3x(kk(?2rk)?5x()k3?1)?y(k?r??(yk?2)r(k1)?2(k)5y(11??)x(k?5)x(k?r(k)3?)2?r(k)(x ?5(k)?3rkk3??x()2112于是有:)k3(?(?1)?3xk)5xk)?r(?(xk221又因为)?k(??(xk1)x)r(k21所以状态空间表达式为更多精品文档. 学习-----好资料 ?x(k?1)x(k)101????????11??r(k)?????????x?3?3?5(x(k)k?1)?????????22 ?x(k)?????101y(k)????x(k)???2(4)系统矩阵为0101??????????,输出矩阵为0c?110?0G?cG?1,?????3?5?3?5????c10????能观性矩阵为,,系统完全能观。2Q?rank??Q????oo cG01???? 三.(本题满分10分) 回答下列问题: (1)简述线性系统的对偶原理; (2)简述线性定常系统的状态稳定性与输出稳定性的相互关系; r?2rr阶线性解耦系统等效于多少个独立的单输入单输出系统?输出(3)输入【解答】 (1)若线性系统1与线性系统2互为对偶,则系统1的能控性等价于系统2的能观性,系统1的能观性等价于系统2的能控性。 (2)若线性定常系统的状态稳定,则输出必稳定,反之,若线性定常系统的输出稳定,则状态未必稳定。当且仅当线性定常系统的传递函数没有零极点对消现象时,其状态稳定性和输出稳定性才是等价的。 r?2rrr个独立的单输入单输出系统。输入)输出阶线性解耦系统等效于(3 四.(本题满分10分) x?x?x cos x?2211?,判
哈尔滨工业大学《现代控制理论基础》考试题B卷及答案
哈工大2010 年春季学期 现代控制理论基础 试题B 答案 题号 一 二 三 四 五 六 七 八 卷面分 作业分 实验分 总分 满分值 10 10 10 10 10 10 10 10 80 10 10 100 得分值 第 1 页 (共 8 页) 班号 姓名 一.(本题满分10分) 请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。 【解答】根据基尔霍夫定律得: 1113222332 1L x Rx x u L x Rx x Cx x x ++=?? +=??+=? 改写为1 13111 22 322 31 211111R x x x u L L L R x x x L L x x x C C ? =--+?? ?=-+???=-?? ,输出方程为2y x = 写成矩阵形式为
[]11 111222 2 331231011000110010R L L x x L R x x u L L x x C C x y x x ??? --???????????????? ???????=-+???? ??????? ??????????????? ? ???-?????? ? ? ??? ?? ?=??? ?????? 二.(本题满分10分) 单输入单输出离散时间系统的差分方程为 (2)5(1)3()(1)2()y k y k y k r k r k ++++=++ 回答下列问题: (1)求系统的脉冲传递函数; (2)分析系统的稳定性; (3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。 【解答】 (1)在零初始条件下进行z 变换有: ()()253()2()z z Y z z R z ++=+ 系统的脉冲传递函数: 2()2 ()53 Y z z R z z z +=++ (2)系统的特征方程为 2()530D z z z =++= 特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。 (3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到 21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+ 由已知得 (2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+- []212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有: 212(1)3()5()3()x k x k x k r k +=--- 又因为 12(1)()()x k x k r k +=+ 所以状态空间表达式为
《现代控制理论》第3版课后习题答案
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 1 1K s K K p +s K s K p 1 +s J 11s K n 2 2s J K b - + + - +- ) (s θ)(s U 图1-27系统方块结构图 解:系统的模拟结构图如下: ) (s U ) (s θ-- - + ++图1-30双输入--双输出系统模拟结构图 1 K p K K 1p K K 1++ +p K n K ? ? ?1 1J ? 2 J K b ? ?- 1 x 2 x 3 x 4 x 5x 6x 系统的状态方程如下:
u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 1611166 13153 46 1 51 41 31 33 222 11+ - - =+-==+ + - - == =? ? ? ? ? ? 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 []????????? ???????????=??????? ? ?????????? ????+?? ???????? ?????????????????????? ? ??? ? ???????? ?---- -=??????????????????????????????6543211654321111111126543 2100 0001 000000 00 0000 0001 00100000 000 000 10 x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 R1 L1 R2 L2 C U ---------Uc --------- i1 i2图1-28 电路图
《现代控制理论基础》考试题B卷及答案
一.(本题满分10分) 请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。 【解答】根据基尔霍夫定律得: 1113222332 1L x Rx x u L x Rx x Cx x x ++=?? +=??+=? 改写为1 13111 22 322 312 11111R x x x u L L L R x x x L L x x x C C ? =--+?? ?=-+???=-?? ,输出方程为2y x = 写成矩阵形式为
[]11 111222 2 331231011000110010R L L x x L R x x u L L x x C C x y x x ??? --???????????????? ???????=-+???? ??????? ??????????????? ? ???-?????? ? ? ??? ?? ?=??? ?????? 二.(本题满分10分) 单输入单输出离散时间系统的差分方程为 (2)5(1)3()(1)2()y k y k y k r k r k ++++=++ 回答下列问题: (1)求系统的脉冲传递函数; (2)分析系统的稳定性; (3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。 【解答】 (1)在零初始条件下进行z 变换有: ()()253()2()z z Y z z R z ++=+ 系统的脉冲传递函数: 2()2 ()53 Y z z R z z z +=++ (2)系统的特征方程为 2()530D z z z =++= 特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。 (3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到 21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+ 由已知得 (2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+- []212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有: 212(1)3()5()3()x k x k x k r k +=--- 又因为 12(1)()()x k x k r k +=+ 所以状态空间表达式为
《现代控制理论》课后习题全部答案(最打印版)
第一章习题答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 图1-27系统方块结构图 解:系统的模拟结构图如下: 图1-30双输入--双输出系统模拟结构图 系统的状态方程如下: u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x p p p p n p b 161116613153 46 1 5141313322211 +-- =+-==++--== =??? ?? ? 阿 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为
[]????? ? ??? ? ??????????=??????? ???????????????+?????? ?????????????????????????? ????????????? ?-----=????????????????????????????? ?654321165432111111112654321000001000000 0000000100 10000000000010x x x x x x y u K K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p p p n p b 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 L1L2 U 图1-28 电路图 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为:
现代控制理论试卷答案与解析
现代控制理论试卷作业 一.图为R-L-C 电路,设u 为控制量,电感L 上的支路电流 11121222121212010Y x U R R R R Y x R R R R R R ????????????=+????????-????+++???????? 和电容C 上的电压2x 为状态变量,电容C 上的电压2x 为输出量,试求:网络的状态方程和输出方程(注意指明参考 方向)。 解:此电路没有纯电容回路,也没有纯电感电路,因有两个储能元件,故有独立变量。 以电感L 上的电流和电容两端的电压为状态变量,即令:12,L c i x u x ==,由基尔霍夫电压定律可得电压方程为: 从上述两式可解出1x ?,2x ? ,即可得到状态空间表达式如下: ??????21y y =????????++-211212110R R R R R R R ??????21x x +u R R R ????????+2120 二、考虑下列系统: (a )给出这个系统状态变量的实现; (b )可以选出参数K (或a )的某个值,使得这个实现或者丧失能控性,或者丧失能观性,或者同时消失。 解:(a )模拟结构图如下: 则可得系统的状态空间表达式: (b ) 因为 3023A -??=??? 0013 k k a -??-??-? 110b ????=?????? 所以:当1a =时,该系统不能控;当1a ≠时,该系统能控。 又因为:[2C = 1 ]0 所以:当0k =或1a =时,该系统不能观;当0k ≠且1a ≠时,该系统能观。 综上可知:当1a =时或0k =且1a =时,该系统既不能控也不能观。 三、已知系统. Ax x =?的状态转移矩阵为: (1)试确定矩阵A ,并验证At e 确为上式。
现代控制理论第版课后习题答案
现代控制理论第版课后习 题答案 Prepared on 22 November 2020
《现代控制理论参考答案》 第一章答案 1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。 解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y = 所以,系统的状态空间表达式及输出方程表达式为 1-2有电路如图1-28所示。以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。 解:由图,令32211,,x u x i x i c ===,输出量22x R y = 有电路原理可知:? ? ? +==+=++3 213 222231111x C x x x x R x L u x x L x R 既得 2 221332 2222131111111111x R y x C x C x x L x L R x u L x L x L R x =+- =+-=+-- =? ? ? 写成矢量矩阵形式为: 1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。 解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述 列写其相应的状态空间表达式,并画出相应的模拟结构图。 解:令.. 3. 21y x y x y x ===,,,则有
相应的模拟结构图如下: 1-6 (2)已知系统传递函数2 )3)(2() 1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现, 并画出相应的模拟结构图 解:s s s s s s s s s W 31 233310)3(4)3)(2()1(6)(22++++- + +-=+++= 1-7 给定下列状态空间表达式 []??? ? ? ?????=???? ??????+????????????????????----=??????????321321321100210311032010x x x y u x x x x x x ‘ (1) 画出其模拟结构图 (2) 求系统的传递函数 解: (2)???? ??????+-+-=-=31103 201 )()(s s s A sI s W 1-8 求下列矩阵的特征矢量 (3)???? ??????---=6712203 010 A 解:A 的特征方程 0611667122301 23=+++=?? ?? ??????+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ
现代控制理论考试卷及答案
西北工业大学考试试题(卷)2008 -2009 学年第2 学期 1 2()0 () x t x t ?? =??- ??
10x =????1221x x kx x x kx =-=--
2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+-+-+- ++-+=??????-+++=-??? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 1 1 2222}){()(22112 2 1221112112 213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=??????+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(0 2222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ 第三题(15分,答案不唯一,这里仅给出可控标准型的结果) (1) 系统动态方程(3分) []x y u x x 0010 10032010001 0=????? ?????+??????????--=
控制工程基础2010试题A卷
控制工程基础 一、填空题(每空1分,15题共20分) 1.控制系统由控制对象和控制器两部分组成。 2.建立系统数学模型的方法有分析法和实验法两种。 3.按其数学模型是否满足叠加性,控制系统可分为线性系统和非线性系统。4. 随动系统是指在外界作用下,系统的输出能相应于输入在广阔范围内按任意规律变化的系统 5.经典控制理论采用的数学模型主要传递函数以为基础;现代控制理论采用的数学模型主要以为状态空间方程基础。 6.工程上常用的线性化方法是将非线性函数在平衡点附近展开成Taylor级数,然后去掉高次项以得到线性函数。 7.广义误差平方积分性能指标特点既不允许大的动态误差e(t)长期存在,又不允许大的误差变化率长期存在。 8.校正元件按在系统中的连接方式可分为串联校正、反馈校正和顺馈校正等。 9.系统频率特性指标中的谐振频率是指幅频特性A(ω)出现最大值Amax时的频率。 10.系统传递函数与其单位脉冲响应函数的关系是拉氏反变换。 11.系统稳定的充要条件是闭环系统特征根具有负实部。 12.某线性定常系统的单位斜坡响应为t )(- y2 =,0 + t e t t。其单位阶跃响应为 ≥ t -。 e2 1= 2 13.在工程控制实践中,为使系统有满意的稳定性储备,一般其幅值裕度应满足大
于6dB 或大于2 。 14.最小相位系统是指 传递函数所有零点和极点均在复平面s 的左半平面内 。 15.已知系统开环传递函数为) 1(9)(+=s s s G K ,则系统的固有频率、阻尼比以及单位斜坡输入所引起的稳态误差分别为 3 、 61 、 91 。 二、单项选择题(每题2分,10题共20分) 1.下面关于微分环节的控制作用描述中正确的是: ( D ) (A)使相位滞后 (B)减小系统的阻尼 (C)抗高频干扰 (D)使相位超前 2.稳态误差除了与系统的型别、传递函数有关外,还与下述哪一项有关? ( D ) (A) 阶次 (B) 振荡频率 (C) 阻尼比 (D) 输入信号类型 3.二阶振荡系统幅值衰减的快慢取决于: ( C ) (A) d ω (B)n ξω (C) 特征根实部绝对值 (D) 特征根虚部的分布情况 4.系统输出的拉氏变换完全取决于: ( B ) (A)系统的传递函数的极点位置 (B)系统的初始状态、输入及其传递函数 (C)系统的传递函数 (D)系统的固有特性 5.相位滞后校正环节相当于: ( A ) (A )低通滤波器 (B )高通滤波器 (C )带通滤波器 (D ) 带阻滤波器 6.下图为一阶系统单位脉冲响应曲线,则下列说明正确的是: ( B ) (A) 系统的输出为0,2)(2≥=-t e t t ω (B) 系统的输出为0,)(≥=-t e t t ω
哈尔滨工业大学《现代控制理论基础》考试题A卷及答案
哈工大2010年春季学期 现代控制理论基础试题A答案 题号一二三四五六七八卷面分作业分实验分总分 满分值10 10 10 10 10 10 10 10 80 10 10 100 得分值 第1页(共8页) 班号 姓名 一.(本题满分10分) 如图所示为一个摆杆系统,两摆杆长度均为L,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M)视为质点,两摆杆中点处连接一条弹簧, 1 θ与 2 θ分别为两摆杆与竖直方向的夹角。当 12 θθ =时,弹簧没有伸长和压缩。 水平向右的外力() f t作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻 尼,而且位移足够小,满足近似式sinθθ =,cos1 θ=。 (1)写出系统的运动微分方程; (2)写出系统的状态方程。 【解】 (1)对左边的质量块,有 () 2 111211 cos sin sin cos sin 222 L L L ML f k MgL θθθθθθ =?-?-?- 对右边的质量块,有 () 2 21222 sin sin cos sin 22 L L ML k MgL θθθθθ =?-?- 在位移足够小的条件下,近似写成: () 1121 24 f kL ML Mg θθθθ =--- () 2122 4 kL ML Mg θθθθ =--
即 112442k g k f M L M ML θθθ??=-+++ ??? 21244k k g M M L θθθ??=-+ ??? (2)定义状态变量 11x θ=,21x θ=,32x θ=,42x θ= 则 12 2133441344244x x k g k f x x x M L M ML x x k k g x x x M M L =?? ???=-+++ ???? ? =????=-+? ????? 或写成 11 22334401 000014420001000044x x k g k x x M L M f ML x x x x k k g M M L ? ? ?? ?????????? ??-+???? ? ??????????=+??? ?????? ??????????????????? ????-+?? ? ? ?????? ? 二.(本题满分10分) 设一个线性定常系统的状态方程为= x Ax ,其中22R ?∈A 。 若1(0)1?? =??-??x 时,状态响应为22()t t e t e --??=??-?? x ;2(0)1??=??-??x 时,状态响应为 2()t t e t e --?? =??-?? x 。试求当1(0)3??=????x 时的状态响应()t x 。 【解答】系统的状态转移矩阵为()t t e =A Φ,根据题意有 221()1t t t e t e e --????==????--???? A x 22()1t t t e t e e --????==????--???? A x 合并得 221 2211t t t t t e e e e e ----????=????----?? ??A
(完整版)现代控制理论试卷答案与解析
现代控制理论试卷作业 一.图为R-L-C电路,设u为控制量,电感L上的支路电流 11 1212 22 121212 010 Y x U R R R R Y x R R R R R R ???? ???? ???? =+ ???? ???? - ???? +++ ???? ???? 和电容C上的电压 2 x为状态变 量,电容C上的电压 2 x为输出量,试求:网络的状态方程和输出方程(注意指明参考方向)。 解:此电路没有纯电容回路,也没有纯电感电路,因有两个储能元件,故有独立变量。 以电感L上的电流和电容两端的电压为状态变量,即令: 12 , L c i x u x ==,由基尔霍夫电压定律可得电压方程为: 2221 R C x x L x ?? +-= 1121 ()0 R x C x L x u ?? ++-= 从上述两式可解出 1 x ? , 2 x ? ,即可得到状态空间表达式如下: 12 112 1 2 12 () () R R x R R L R x R R C ? ? ? - ???+ ??? = ??? - ??? + ? 12 1 1212 2 1212 ()() 11 ()() R R x R R L R R L u x R R C R R C ??? ??? ++ ?? ??? + ?? ??? ?? -??? ++ ??? ? ? ? ? ? ? 2 1 y y = ? ? ? ? ? ? ? ? + + - 2 1 1 2 1 2 1 1 R R R R R R R ? ? ? ? ? ? 2 1 x x +u R R R ? ? ? ? ? ? ? ? + 2 1 2 二、考虑下列系统: