智能清扫机器人
摘要
总体方案是设计一个自主控机器人,在一个模拟的平面结构内运动,移动机器人本体,完成自主移动、避障功能。尽快遍历每一个角落,完成任务,这个工作受多个因素的影响。其中在现实生活中清洁机器人清理的过程中,利用了机器人自身的传感系统、运动控制系统和自主蔽障系统,自动记录时间系统等。整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:
(1)通过编程来控制小车的速度;
(2)传感器的有效应用;
关键词80C51单片机、光电检测器、PWM调速、电动小车、舵机
一.国内外研究现况
在日本,东日本铁路公司、shinko电器公司和Howa工业有限公司联合研制了车站地面清扫机器人. 机器人可沿墙壁从任何一个位置自动启动. 利用不断旋转的刷子将废弃物扫入白带容器中[1]日本静甲株式会社的清水工厂开发出一种自动清扫机器人. 可用于各种工厂的清扫工作. 机器人采用光纤陀螺控制方向. 采用编码器和超声波传感器测距. 采用光学探测器探测障碍物机器人的四周装有橡胶垫. 橡胶垫内部装有触觉传感器. 一旦机器人与人接触. 触觉传感器信号会使机器人停下来1以保证人的安全Br-3]这些应用还都是用于工业或者公共的场合. 真正具有里程碑意义的是2002年9月清洁机器人‘‘Roomba”美国面市. 这是一款面向家庭的机器人。重约2ky直径为 762mm(30"). 具有高度自主能力. 可以游走于房间各家具缝隙间. 灵巧地完成清扫工作. 据说这是将用于军事的“躲避地雷的移动技术,'应用到了吸尘器上。“Roomba”的动作有点迟缓. 但却能稳定安全地完成任务由于能够在完成任务后自动切断电源. 所以可以在外出期间让‘‘Roomba”在家进行清扫英国法国和澳大利亚也都推出过清洁机器人产品
在国内,对清洁机器人相关技术如机器感知、机器人导航和定位与路径规划机器人控制、电源与电源管理、动力驱动等技术的研究. 哈尔滨工业大学、华南理工大学、上海交通大学等高校,也对清洁机器人进行了大量的研究,并取得了一些成果,这些都为清洁机器人的研究开发和推广奠定了物质和技术基础
二. 设计思路
为了制作一个能够覆盖全区域的清洁机器人,首先是设计一个移动的平台。为了简便起见,设计了两轮车身,两个后轮做主动轮,主动轮用两个直流电机。从动轮用一个万向轮。清扫装置用一个伺服电机带动一个灰尘刮和一个刷子,产生推动力达到除尘的目的。在车身前部放置一个储存垃圾的箱体。在车身的最后还设计了一个抹地机械手,进一步达到清洁的目的,机械手下带有洒水除尘装置,机械手上面的水箱带有一个用伺服电机控制的门,用来控制洒水量。车身上部安
装了一个光电开关,以达到避障的作用。
三.电子电路的设计
采用一块微处理器STC89C52为控制系统的核心,负责控制电机、障碍检测信号处理、舵机控制、液晶显示等。电机驱动模块采用单片机作为电机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而实现电机调速。单片机完成控制算法,再将计算结果转化为PWM信号输出到电机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小。直流电机控制,液晶显示模块和单片机最小系统由一个电源供电。障碍检测模块用于检测小车前进路上的障碍物,如有障碍则进行避让。液晶显示模块用于显示当前小车运行状态。
1. 机械方案的设计
小车的驱动设计为二轮驱动。而二轮驱动又分为前轮和后轮驱动。后轮驱动的好处是:转向性能得到改善。前轮是转向轮,使得转向时的行驶方向容易控制,不容易出现过度转向的现象,转向安全性也得到提高。
2. 车体结构设计
为了满足机器人的性能要求,机器人的机械结构应该具有稳定性,运动灵活性和足够强度的特点,同时尺寸要小,容量要大,重量要轻。清扫小车的机械结构组成部分主要有:车体的设计,传感器的安装。
为了保证小车良好的直线性,采用双电机驱动左右两轮的方式,在车体的前端装有一个不锈钢万向滚珠,这样可以使小车获取较好的机动性和灵活性。底盘采用铝合金框架,以增大其坚固性,减轻重量。
3. 单片机STC89C52的系统设计
由于51系列单片机在我国普及的时间比较早,开发和应用的实例比较多,在学习编写程序时有丰富的实例可以参考和借鉴。因此,我选择51系列单片机进行控制。本设计中我选用了STC公司的STC89C52。
3.1 STC89C52的特点
STC89C52具有以下几个特点:
·STC89C52与MCS-51系列的单片机在指令系统和引脚上完全兼容;
·片内有8k字节在线可重复编程快擦写程序存储器;
·全静态工作,工作范围:0Hz~33MHz;
·三级程序存储器加密;
·128×8位内部RAM;
·32位双向输入输出线;
·两个十六位定时器/计数器;
·五个中断源,两级中断优先级;
·一个全双工的异步串行口;
·间歇和掉电两种工作方式。
3.2 STC89C52的功能描述
STC89C52是一种低损耗、高性能、CMOS八位微处理器,片内有8k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。它与MCS-51系列单片机在指令系统和引脚上完全兼容,不仅可完全代替MCS-51系列单片机,而且能使系统具有许多MCS-51系列产品没有的功能[5]。
STC89C52可构成真正的单片机最小应用系统,缩小系统体积,增加系统的可靠性,降低系统的成本。只要程序长度小于8k,四个I/O口全部提供给用户。可用5V电压编程,而且擦写时间仅需10毫秒,仅为8751/87C51的擦除时间的百分之一,与8751/87C51的12V电压擦写相比,不易损坏器件,没有两种电源的要求,改写时不拔下芯片,适合许多嵌入式控制领域。工作电压范围宽(2.7V~6V),全静态工作,工作频率宽在0Hz~24MHz之间,比8751/87C51等51系列的6MHz~12MHz更具有灵活性,系统能快能慢。STC89C52芯片提供三级程序存储器加密,提供了方便灵活而可靠的硬加密手段,能完全保证程序或系统不被仿制。P0口是三态双向口,通称数据总线口,因为只有该口能直接用于对外部存储器的读/写操作。
3.3 STC89C52引脚功能
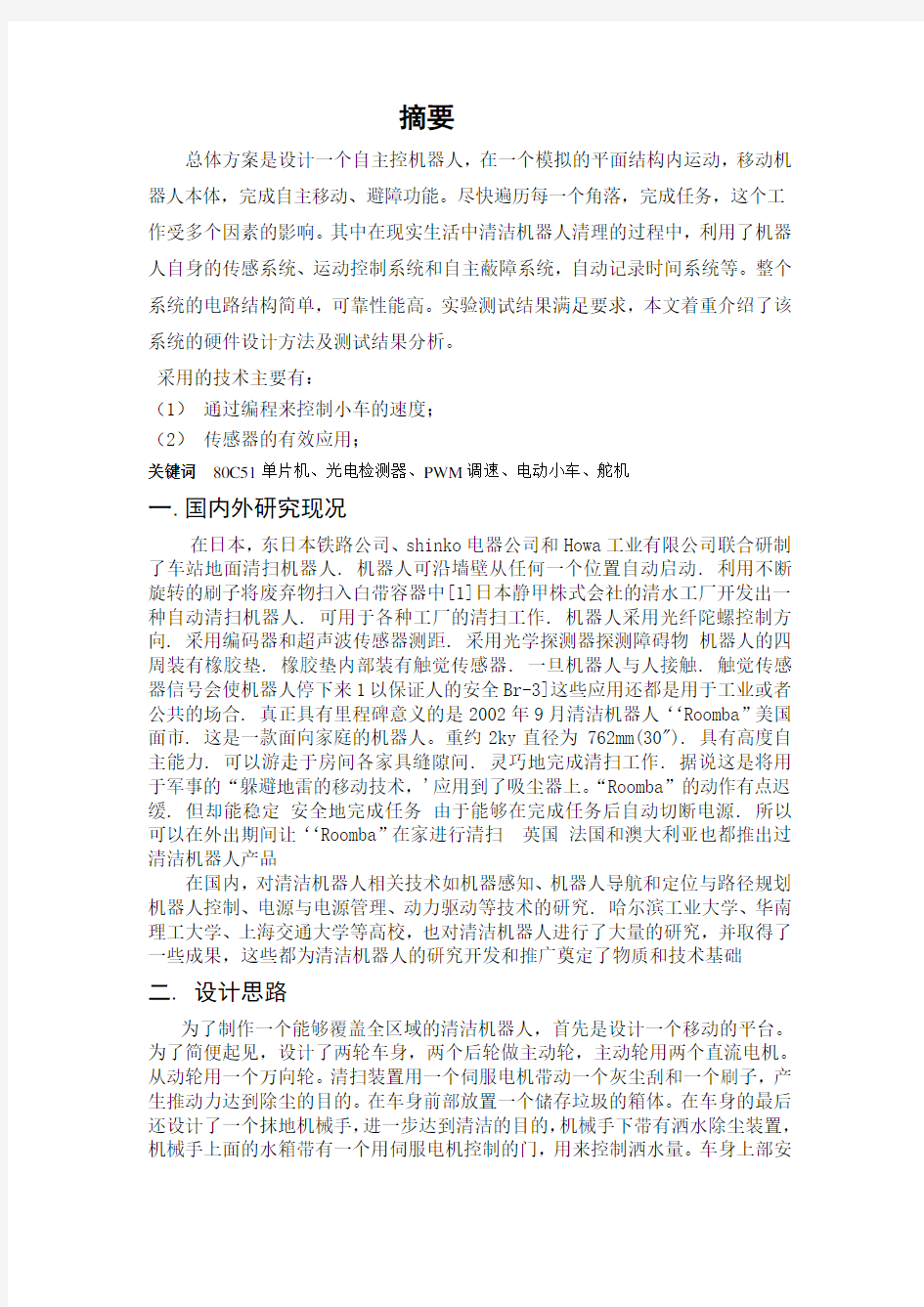
STC89C52单片机为40引脚芯片如图4-1。
图4-1 STC89C52管脚图
(1)口线:P0、P1、P2、P3共四个八位口。
①P0口是三态双向口,通称数据总线口,因为只有该口能直接用于对外部存储器的读/写操作。P0口也用以输出外部存储器的低8位地图1址。由于是分时输出,故应在外部加锁存器将此地址数据锁存,地址锁存信号用ALE。
②P1口是专门供用户使用的I/O口,是准双向口。
③P2口是从系统扩展时作高8位地址线用。不扩展外部存储器时,P2口也可以作为用户I/O口线使用,P2口也是准双向口。
④P3口是双功能口,该口的每一位均可独立地定义为第一I/O功能或第二I/O功能。作为第一功能使用时操作同P1口。P3口的第二功能如表4-1所示。
(2)控制口线:PSEN(片外选取控制)、ALE(地址锁存控制)、EA(片外存储器选择)、RESET(复位控制);
(3)电源及时钟:VCC、VSS、XTAL1、XTAL2操作方法。
3.4 STC89C52复位电路设计
89系列单片机与其他微处理器一样,在启动时都需要复位,使CPU及系统各部
表4-1 P3口的第二功能
端口功能各个功能
P3.0 RXD(串行口输入端)
P3.1 TXD(串行口输出端)
P3.2
INT(外部中断0请求输入端,低电平有效)
P3.3
INT(外部中断1请求输入端,低电平有效)
1
P3.4 T0(定时器/计数器0计数脉冲输入端)
P3.5 T1(定时器/计数器1计数脉冲输入端)
P3.6
WR(外部数据存储器写选通信号输出端,低电平有效)
P3.7
RD(外部数据存储器读选通信号输出端,低电平有效)
件处于确定的初始状态,并从初始状态开始工作。单片机的外部复位电路有上电自动复位和按键手动复位两种。
上电复位利用电容器充电来实现。上电瞬间,RC电路充电,RST引脚端出现正脉冲。只要RST引脚端保持l0ms以上高电平,就能使单片机有效地复位。
图4-2上电复位电路
按键手动复位又分为:按键电平复位和按键脉冲复位。按键电平复位相当于按复位键后复位端通过电阻与Vu电源接通;按键脉冲复位利用RC微分电路产生正脉冲在这里,采用按键脉冲复位(如图4-3),当人为按下按钮时,则Vcc的+5V电平就会直接加到RST端。由于人的动作很快也会使按钮保持接通达数十毫秒,所以能满足复位的时间要求。
图4-3 手动复位电路
在实际的应用系统中,有些外围芯片也需要复位,如果这些复位端的复位电平要求与单片机的复位要求一致,则可以与之相连。
在有些应用系统中,为了保证复位电路可靠地工作,常将RC 电路接斯密特电路后,再接入单片机复位端和外围电路复位端。这特别适合于应用现场干扰大、电压波动大的工作环境。并且,当系统有多个复位端时,能保证可靠地同步复位,在此称其为同步复位电路。
4. 电机驱动模块的设计
为了使选定的电机在峰值转矩下以最高转速驱动负载,电机的功率估算如下:η
ω1020)5.25.1(P P M M P -= (4-1) 式中:P M 为峰值转矩
P ω为最大角速度,本系统为s rad 20
η为传动效率,一般为0.8~0.9
由上式求得电机的功率要在21.2瓦以上,对系统的各种性能和参数进行分析后,我们选用功率为35瓦,120转/分的直流电动机作为机器人的行走电机。
运动控制器芯片输出PWM (pulse width modulation )信号,电压为脉冲形式,
由于输出的电流很小,不能驱动电机。使用电机驱动芯片的目的就是将运动控制器的输出电流放大,从而获得足够大的功率,驱动电机转动。
驱动芯片的工作原理非常简单,即利用晶体三极管能放大电流的原理,将基极的电流放大到100倍以上然后从发射极输出。
本驱动系统选用的是意法半导体联合公司〔SGS-Thomson)生产的电机驱动芯片L298N。L298N为含有15个引脚的直插式芯片。
L298N具有以下主要性能:
(1)体积小:长*宽*高=19.6mm*17.5mm*5mm;
(2)操作电压范围大:操作电压范围从4V到46V;
(3)抗干扰能力强:低于1.5V的电压均视为低电平,对噪声由较强的抑制作
用;
(4)配备散热片,减少温度对电子元器件的影响;
(5)逻辑电平为十5V;
(6)工作效率高:一块L298N可以驱动2台电机,故机器人只需配备一块
L298N;
(7)输出电流大:L298N可以将电流放大到4A;
机器人采用专业驱动芯片L298N为主构成驱动电路。它内部包含4通道逻辑驱动电路。其额定工作电流为2A,最大可达4A,Vss电压最小4.5V,最大可达46V。L298N可以驱动两个二相电机,如图图4-6所示:
输出电压最高可达46V,可以直接通过电源来调节输出电压,由于其工作电流在2~2.5A之间,故满足我们的要求。而且电路简单,使用比较方便。
在使用L298N时,可以用L297来提供时序信号,这样可以节省单片机I/O 口的使用,也可以直接用单片机输出时序信号。
在电路设计时,检测电阻R S必须考虑以下几种选择因素:
①电阻本身可达到的功耗
②L298N允许的检测电压为2.3V,超过这一幅度芯片会自动保护。
③允许电流和功率限制。
图3-4 L298N驱动两个电机
假设可能出现的最大电流为IMAX,驱动电源电压为U,采样电阻阻值为R S,由以上条件我们得出:
RS×IMAX﹤2.3
MAX﹤ 2 (4-3)
(U﹣0.7)×IMAX﹤25
我们采用的驱动电源为12V,故计算得出RS =1 比较合适。
机器人的速度的大小采用PWM方法进行控制。PWM控制就是周期T固定不变,根据输入信号的大小,用软件改变脉冲的占空比,即可改变电机的平均电压,从而控制电机的转速,所以也称为脉宽调制。PWM调速通常配合桥式驱动电路对直流电机进行调速,其调速范围也很宽。
在本驱动电路中由于开关管存在开通和关断时间,因此造成了上下桥路直通短路的问题,直通短路的存在,容易使开关管发热,甚至导致烧毁,而且电机在正反转切换时存在着死区时间的问题,但在正转启动和反转启动时没有。
故解决这一问题可从硬件电路和软件两个方面下手,硬件电路解决较麻烦还存在不稳定因素,因此利用软件解决是最好的办法[6]。
5. 舵机的模块
伺服电机简称舵机,是自动装置中的执行元件,它最大的特点是可控。在有控制信号时,舵机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,舵机就会即停止转动。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。减速齿轮组由电机驱动,其输出端带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向转动,使齿轮组的输出位置与期望值相符,令纠正脉冲最终趋于零,从而达到使舵机精确定位的目的【7】。
舵机主要由以下几个部分组成:舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路板等。
标准的舵机有三条控制线,分别为电源、地及控制。电源线与地线用于提供内部的直流电机及控制电路所需要的能源,电压通常介于4V~6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)【8】。
本设计选用国产的SG-5001型号的舵机。此舵机可以达到控制上的精度而且价格便宜。
舵机电源引线三条线中橙色的线是控制线,连到控制芯片上。红色的线是电源正极线,工作电压是5V。黑色的是地线。
舵机的工作原理:舵机的控制端需输入周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms~2ms,而低电平时间应在5ms~20ms,并不很严格。表4-2表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂在180度范围内转动时与输入脉冲的对应关系。
舵机的瞬时运动速度是由其内部的直流电机和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变。
单片机可以产生PWM信号,由AT89C51得P3.1端口输出。输出得PWM 信号通过光耦隔离传送到舵机中。方波信号经过光耦传输后剔除干扰,产生标准的PWM方波信号,我在实验过程中发现,舵机在运行过程中要从电源吸纳较大的电流,若舵机与单片机控制器共用一个电源,则舵机会对单片机产生较大的干扰【9】。
因此,舵机与单片机控制器采用模块化的供电供电方式,通过光耦来隔离,并且给舵机供电的电源最好采用输出功率较大的电源。为了保证电流我设计的电源模块是用7805构成的单独电源,为指定的负载供电。
表4-2 特定周期下正脉冲宽度与输出角度关系
输入正脉冲宽度(周期为20ms)伺服电机输出臂位置
≈ -45°
≈ -0°
≈ -45°
≈ 90°
6. 避障传感器电路模块的设计
红外避障传感器原理,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体有无的。物体不限于金属,所有能反射光线的物体均可被检测。光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测【10】。
我们所使用的红外避障传感器E18-D80NK是一个NPN型的开关量传感器,当没有障碍物时输出高电平;有障碍物时输出低电平。正常工作电流为20mA,最大工作电流可以达到100mA,可以直接驱动5V直流继电器的。红外避障传感器前端增加了透镜,利用其焦距作用,传感器最远探测80cm处的物体。对障碍物的感应距离可以根据要求通过后部的旋钮进行调节。该传感器的输出信号类型为开关量,可以直接和CPU连接。该传感器内部集成了放大,比较,调制等电路。使用该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,使用广泛【11】。
本模块主要由单片机STC89C52,红外避障传感器组成,其中红外避障传感器用于检测是否有障碍物,单片机作为本模块的关键器件用于对光电开关检测的信号进行判断和分析,确定出前方障碍的大体情况,并为主控制器提供信号,配合主控制器发出动作指令。
7.显示模块的设计
液晶显示器作为一种低功耗显示器件,广泛应用于计算器、数字式仪表等低功耗系统中。但一般使用的液晶显示器均为七段笔划式,只能显示数字和少量字
符,对于较复杂的字符或图形则无能为力。而点阵式液晶显示模块可以显示各种各样的字符(包括简单的汉字),而且点阵显示模块具有可编程能力,与单片机接口方便。由于以上优点,点阵式液晶显示模块获得了广泛的应用。本设计中液晶显示模块选用了JM12864K型液晶显示器与AT89C51单片机的组合使用,用于显示仿生爬虫在运动过程中的状态。JM12864K汉字图形点阵液晶显示模块,可显示汉字及图形,内置8192个中文汉字(16X16点阵)、128个字符(8X16点阵)及64X256点阵显示RAM(GDRAM)。
主要技术参数和显示特性:
电源:VDD 3.3V~+5V(内置升压电路,无需负压);
显示内容:128列× 64行
显示颜色:黄绿
显示角度:6:00钟直视
LCD类型:STN
与MCU 接口:8 位或4位并行/3 位串行
配置LED背光
多种软件功能:光标显示、画面移位、自定义字符、睡眠模式等
逻辑工作电压(VDD):4.5~5.5V
电源地(GND):0V
工作温度(Ta):0~60℃(常温) / -20~75℃(宽温)
表4-3 12864引脚
8.电源供给模块的设计
电源供给模块是机器人系统提供能源的装置,当电池的输出电压发生波动时,及负载电路发生变化时,为了保证数字电路芯片的逻辑电平不受影响,使机器人能正常的工作,要求电源电压尽量保持稳定,有必要使用稳压芯片。我们选用的直流电机使用的是直流12V电源,驱动电路的供电电源为直流12V电源,驱动电路的输入信号采用的是5V系统,单片机系统也采用5V电压供电。为了提供CPU使用5伏的电源采用的是7805芯片,同时在电源的正极与地线之间加上了去耦电容,它可以作为储能元件,它吸收或提供该集成电路内部三极管导通、截止引起的电流变化,从而降低系统噪声。
本系统中,为了给数字部分的电路提供5V的稳定电源,我们选用的是美国德州仪器公司生产的芯片:uA7805。它的输入电压范围是7-25V;输出电压的范围是4.8-5.2V。该芯片除了具有良好的稳压功能外,还包含过载保护电路,散热电路,限流电路等。uA7805变压稳压电路如图4-7所示:
图4-7 7805变压稳压电路图
四.控制系统的主程序
程序设计主要有:控制系统的主程序设计、舵机控制的设计、障碍检测子程序的设计、显示子程序的设计。
主程序的流程图如图5-1所示。主程序的功能是:完成各个模块的初始化,当电源供电时,进入清扫子程序;当避障传感器检测到障碍时,进入避障子程序。
图5-1 主程序流程图
五.测试:
1、实验器材:1.智能清扫小车一辆;
2.PC机一台,调试程序用;
3.12V电池一块;
4.万用表一块;
5.编程器一台;
6.障碍物体一个
在比赛使用赛道上,虽然成功率较低,在避障的一个90度弯上有转角不精确现象。
2、通过多次测调试,本自动识别路径的智能小车实现功能如下:
1)在规定的时间内小车可完成全程路的清扫功能;
2)在不同配重物的情况下,小车达到的平衡度有一定的误差;
3)小车可避障运行;
3、结果分析及相应的措施:
经过小车在实验场地里实验运行发现,小车经常不能抵达目的位置;而且,在不同场地就不能再现同一实验结果,即不能沿着同一条路线行走,很显然这是由于小车的底盘电机控制过程中用的是开环控制,并且运行速度比较快,刹车后有一段滑行,所以会出现不同的运行结果。鉴于此,我只好在程序中根据不同的场地在适当的时候根据传感器记录运行的路程,使机器人提前减速,以使之顺利到达目的。
六、心得体会
这次比赛制作使我们体会到了理论和实际之间是有差别的,我们在掌握理论的同时要把理论放到实际中去。实验中遇到了和多困难,理论上正确的但在实际中运行不起来。认识到单掌握理论是不够的。要考虑到实际的外界和内部之间的因素,之间的联系,全方位的了解问题,思考问题,理解问题,解决问题。我们认为学习最好能在实践中,掌握,巩固自己的理论知识,得到更好的发展。
智能清洁小车是集信息技术、自动化技术、传感技术、计算机网络技术等结合的融合体。随着对小车研究的深入和移动机器人在工业、农业、日常生活中的逐渐普及,机器人研究的各种方向的理论研究显得越来越迫切。
齐齐哈尔大学第三届“创新杯”科技作品竞赛智能清洁机器人结题报告
班级:自动化08
姓名:丰龙、王亚杰、王洪洋
指导教师:尹明
人工智能与机器人教学教材
人工智能与机器人
1 1.机器人定义的三个共有属性是:有类人的功能、根据人的编程能自动的工作、人造的机器或机械电子装置。 2.简述机器人的发展史? 1954年美国人(George C. Devol)乔治·德沃尔制造出世界上第一台可编程的机器人,并在1956年获得美国专利。 1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。 1960年,Conder公司购买专利并制造了样机。 1961年,Unimation公司(通用机械公司)成立,生产和销售了第一台工业机器“Unimate”,即万能自动之意。 1962年,美国万能自动化(Unimation)公司的第一台机器人Unimate在美国通用汽车公司(GM)投入使用标志着第一代机器人的诞生。 1963年麦卡锡则开始在机器人中加入视觉传感系统。 1965年 MIT推出了世界上第一个带有视觉传感器。 1967年, Unimation公司第一台喷涂用机器人出口到日本川崎重工业公司。 1968年,第一台智能机器人Shakey在斯坦福研究所诞生。 1972年,IBM公司开发出直角坐标机器人。 1973年,Cincinnati Milacron公司推出T3型机器人。 1978年,第一台PUMA机器人在Unimation公司诞生 1998年世界著名玩具厂商丹麦乐高(LEGO)公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样, 1999年日本索尼公司推出犬型机器人爱宝(AIBO)。 2002年5月2日本田制造的名叫阿西(Asimo)四英尺高的白色机器人摇响开市铃声,摇响了机器智能时代的开始。 2006年6月,微软公司推出基于Windows的开发环境,用于构建面向各种硬件平台的软件---Microsoft Robotics Studio,试图实现机器人统一的标准或平台。
智能机器人客服的关键指标与数据运营
《智能机器人客服的关键指标与数据运营》当前人工智能技术蓬勃发展,机器学习技术逐步应用到企业的技术体系中。很多企业也都在加大这方面的投入,出现了很多新的应用和产品。就如大家感受到的,长期以来作为企业IT技术投入并不高的客服中心组织,现在却受到了更多业界的关注。 国内企业信息化大概从90年代开始,从那时开始数据作为信息的主要载体开始进入企业的运营管理,在零几年初逐步成熟,典型代表是商业智能系统成为企业重要基础设施,并为企业的经营和管理发挥重要作用,CRM开始在企业成熟应用。这个时期的数据主要以企业的订单交易数据和供应链数据为主。 企业的客服也从过去的一对一、实时沟通模式,升级成为一对多、异步沟通的服务形式,不仅可以一个平台接待全渠道客户发起的客服请求,通过客服智能机器人的接入更是成倍的提高了工作效率,节约大量的客服成本。 智能客户服务中心的运营管理主要从以下三个方面着手:
其一,客服团队管理方面:客服流动率(行业25%)、客户咨询率(行业5%)、咨询接通率(行业98%)、客服实际工作率(行业92%)这几个是核心数字化指标,首先保证客服可以在岗位上开心、持久的工作,并且不断提高自己的技能获得更好的发展空间。然后是整体业务的健康发展,保证客户的咨询数量,客户发起的咨询请求能够及时有效的被客服接起。总之,客服经理需要密切关注以上几个核心指标,以便打造一支稳定、高效、优质的智能客服团队。 其二,客服业务管理方面:客服平均日接待量(行业200次/天)、平均会话时间(行业8.5分钟)、平均会话消息条数(行业17-25条)、客服较大接待量设置(行业10个)、会话消息比(行业7:7:1)、咨询转接率(行业3%)、客户排队时间(行业150秒)、时候处理时间(行业60秒)是关键指标。其中主要以工作量、消息数量、同时接待的会话数量以及客户排队数据为主。 其三,客服质量管理方面:客服首次响应时间(行业20秒)、平均响应时间(行业30秒)、咨询好评率(行业97%)、质检合理率(行业95%)、满意度评价参评率(行业50%)、质检率(行业
国内扫地机器人十大排名 实力品牌详解
国内扫地机器人十大排名实力品牌详解 智能家电是市场需求下的智慧产物,它能给人们的生活带来便利,扫地机器人是其中较为典型的代表,其起源可以追溯到欧洲,由于智能家居理念进入中国较晚,扫地机器人在国内也是在近几年才开始被广泛使用,不过幸运的是如今的技术更为成熟。随着扫地机器人市场的打开,越来越多的同类产品出现在市面上,品牌种类也越来越多,很容易让人挑花眼,为了方便消费者的选择,以下是根据产品口碑和销量整理的国内市场十款较为有实力的扫地机器人品牌。 一、斐纳TOMEFON 斐纳TOMEFON源自德国,始创于1976年,致力于室内净化领域已经有40 多年的成功历史,欧洲作为智能家居的起源地,斐纳TOMEFON在该领域的品牌知名度较高,是欧洲家庭购买扫地机器人的首选品牌,常年位于销量榜首。斐纳TOMEFON旗下的扫地机器人因高颜值外表夺人眼球,高性价比虏获人心,最终以过硬的质量和极佳的清洁体验获得消费者的高度认可
二、iRobot 仅次于斐纳TOMEFON位于第二名,iRobot是美国著名的扫地机器人品牌,可有效清洁地板、地砖或地毯上的灰尘、毛发等,清扫轨迹遍布整个房间包括家具底部、墙根等平时难以触及的地方。2个虚拟墙可设置清洁区域,自动检测不同地面转换4种不同的清扫模式,有自动回归基座自动返回充电。虽是美国品牌,旗下扫地机器人还内置中文语音操作,十分方便。 三、普桑尼克 台湾品牌,依托于台湾工研院的技术,采用IPNAS无线载波导航规划系统,
先利用无线载波室内定位技术,为全屋提供0.3厘米精度定位信息,大范围精准定位,后启用HSIR+多点矩阵构图系统与双侦测科技的联合运用,实现全屋环境的地图规划。 四、科沃斯 中国知名扫地机器人品牌,新品搭载蓝鲸清洁系统2.0,采用创新恒压浮动抹布,可弹性紧贴地面,深度清除顽固污渍,可用手机智能调节水量,根据家中的地面情况选择高中低三档出水,可应对大户型的湿拖。机身底部滚刷吸口可切换,面对宠物的毛发清洁可轻松解决,并无惧灰尘。
关于智能扫地机器人的市场调查报告以及总体设计
关于智能扫地机器人的市场调查报告以及总体设计 杨浩荣王健聪 (北京理工大学珠海学院电气工程及其自动化系) 引言:机器人技术作为20世纪最伟大的发明之一,自上世纪60年代问世以来,已获得巨大的进步。在机器人技术不断成熟的今天,机器人在工业领域大放异彩的同时,它已快速地在农业、军事、服务等非工业领域不断拓展,并取得一定的成果。 关键词:市场需求智能扫地机器人寻路算法 Market research report on intelligent robot sweeps the floor, and the overall design Yang Haorong Wang Jianlin Abstract:robot technology as one of the greatest inventions of the 20th century, since the 1960 s, has acquired great progress. In today's robot technology continues to mature, to shine in the field of industrial robot at the same time, it has quickly in non-industrial sectors such as agriculture, military and service development, and achieved certain results. Key words: market demand intelligent sweeping robot pathfinding algorithm 1.市场需求及其调查: 作为新兴的朝阳产业,机器人出现的时间虽然短暂,但是对社会的影响是巨大的,对人类的影响也是深远的。其中,服务型机器人因更为贴近人类的生活已经有越来越多的大企业把目光投注到服务型机器人上,并制定了一些列的产品开发战略规划,产品内容包括从提供家庭日常服务的机器人到机器人玩具。尤其是玩具机器人,因为技术起点相对低,目前已成为诸多大的生产厂家的追逐热点。 服务型机器人,如今的定义尚未统一。服务型机器人的范围很广。 为了更高地了解人们对服务型机器人的了解与期望,我们进行了问卷调查,调查结果如下:
智能清扫机器人
摘要 总体方案是设计一个自主控机器人,在一个模拟的平面结构内运动,移动机器人本体,完成自主移动、避障功能。尽快遍历每一个角落,完成任务,这个工作受多个因素的影响。其中在现实生活中清洁机器人清理的过程中,利用了机器人自身的传感系统、运动控制系统和自主蔽障系统,自动记录时间系统等。整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。 采用的技术主要有: (1)通过编程来控制小车的速度; (2)传感器的有效应用; 关键词80C51单片机、光电检测器、PWM调速、电动小车、舵机 一.国内外研究现况 在日本,东日本铁路公司、shinko电器公司和Howa工业有限公司联合研制了车站地面清扫机器人. 机器人可沿墙壁从任何一个位置自动启动. 利用不断旋转的刷子将废弃物扫入白带容器中[1]日本静甲株式会社的清水工厂开发出一种自动清扫机器人. 可用于各种工厂的清扫工作. 机器人采用光纤陀螺控制方向. 采用编码器和超声波传感器测距. 采用光学探测器探测障碍物机器人的四周装有橡胶垫. 橡胶垫内部装有触觉传感器. 一旦机器人与人接触. 触觉传感器信号会使机器人停下来1以保证人的安全Br-3]这些应用还都是用于工业或者公共的场合. 真正具有里程碑意义的是2002年9月清洁机器人‘‘Roomba”美国面市. 这是一款面向家庭的机器人。重约2ky直径为 762mm(30"). 具有高度自主能力. 可以游走于房间各家具缝隙间. 灵巧地完成清扫工作. 据说这是将用于军事的“躲避地雷的移动技术,'应用到了吸尘器上。“Roomba”的动作有点迟缓. 但却能稳定安全地完成任务由于能够在完成任务后自动切断电源. 所以可以在外出期间让‘‘Roomba”在家进行清扫英国法国和澳大利亚也都推出过清洁机器人产品 在国内,对清洁机器人相关技术如机器感知、机器人导航和定位与路径规划机器人控制、电源与电源管理、动力驱动等技术的研究. 哈尔滨工业大学、华南理工大学、上海交通大学等高校,也对清洁机器人进行了大量的研究,并取得了一些成果,这些都为清洁机器人的研究开发和推广奠定了物质和技术基础 二. 设计思路 为了制作一个能够覆盖全区域的清洁机器人,首先是设计一个移动的平台。为了简便起见,设计了两轮车身,两个后轮做主动轮,主动轮用两个直流电机。从动轮用一个万向轮。清扫装置用一个伺服电机带动一个灰尘刮和一个刷子,产生推动力达到除尘的目的。在车身前部放置一个储存垃圾的箱体。在车身的最后还设计了一个抹地机械手,进一步达到清洁的目的,机械手下带有洒水除尘装置,机械手上面的水箱带有一个用伺服电机控制的门,用来控制洒水量。车身上部安
人工智能机器人发展应用
随着“机器替人”在我国的进一步推进,不仅工业机器人的增速突飞猛进,服务机器人市场也开始出现大爆发,这种爆发一方面来自于国家陆续出台的产业扶植政策,另一方面也因为资本市场的逐渐活跃。因此,不管是上市公司还是初创型企业,都将眼光转向了服务机器人领域。在此背景下,传统的物业管理领域开始了“机器替人”的进程。 近年来,中国的经济飞速增长,劳动力成本也日渐水涨船高,物业管理人员工作繁重,重复性劳动过高,人员流失率大,从业人员素质不高等问题一直困扰着物业管理行业的发展。与此同时,人们对物业服务的要求也变得越来越高,智慧社区、智慧楼宇不仅逐渐成为高档小区的“标配”,也成为了未来社区发展的“终极目标”。机器人在这个过程中发挥了其不可替代的作用。 11月22日,国际房地产顾问“五大行”之一戴德梁行在和人工智能独角兽深兰科技举行签约仪式,戴德梁行亚太区董事局主席暨大中华区行政总裁张国正表示:未来,房产、物业要做到大多数的物业服务用机器人替代。随着人工智能技术的不断进步,像安全检查、访客管理、保洁巡逻、设备检查等多项物业服务都能用智能机器人完成,不仅提升了日常工作效率,也让物业公司大量节省了成本。 笔者观察发现,目前物业机器人主要应用在三大领域,分别是出入管理及接待、自动清洁以及自动巡逻。 生物智能系统:提升出入管理效率及服务体验 不管是小区物业还是写字楼场景,出入管理往往是最耗费时间的环节。陌生人如果要拜访小区或写字楼,往往需要登记身份证并进行核实,再由物业管理人员发放门禁卡。如果碰到前台服务人员过少,或一时之间有多人需要登记的情况,往往需要花费许多时间。若此时再遇上物业服务人员需要解决住户问题,或者还在接电话的情况,这个过程需耗费的时间就更长了。而生物智能管理系统则能很好的解决这个问题。 以深兰科技的手脉设备为例,这是一款用于解决写字楼楼宇、小区物业出入口、大堂单元楼、企业前台等门禁管理系统的手脉闸机。它采用了红外线照射手掌内部毛细血管分叉结构记录,用250位数字加密,识别速度快,并且精准度极高。用户只需通过扫描身份证便可完成验证,同时加载了大数据云端架构等技术,能够实现智能门禁、全景安全监控、智慧考勤等功能。据深兰科技市场品牌部丁先生介绍,深兰的手脉识别系统不仅可用于企业前台及公司门禁管理、自动化考勤及数据表单生成、写字楼、公寓、住宅门禁管理等场景,而且可以用于刷手购物,刷手坐地铁,刷手开车门等生活的方方面面。 类似手脉设备的物业机器人主要解决了三个问题:一是大大提升了人员进出的效率,二是节省了物业公司的人力成本,三则减少了业主与物业之间的矛盾。也正是因为这种人工智能技术能够真正解决行业痛点,不管是以绿地、永旺为代表的房产企业,还是类似雅乐居这样的物业服务公司,还是戴德梁行这样的全球领先地产服务商,都已将“机器替人”提上日程。 智能清洁机器人:提升清洁效率,降低运营成本 在物业清洁领域,重视劳动力的全人工时代早已过去,不少小区或者楼宇已经过渡到了人机协作的半自动化时代。而无人驾驶技术的出现,为劳动力的彻底解放带来“希望的曙光。” 成立于2013年的高仙机器人便是一个典型的例子,这是一家从事自主移动技术研发和应用探索的机器人企业,其生产了很多种类的无人驾驶洗地机。与传统清洁手段相比,这种能够自主移动的智能清洁机器人极大地提升清洁效率。
智能清洁机器人
智能清洁机器人设计 引言:本学期我选修了《机器人概论》这一门选修课,听了老师对多种机器人多方面的介绍,我基本上对智能机器人有了一个大概的了解,同时也萌发了自己设计多用途的智能机器人的兴趣。于是,在老师的讲解下,以及自己对生活的一些感悟设计了一款适用于百姓家庭的清洁机器人,以下是我对这款智能机器人的介绍。 Introduction:this semester I took "robot introduction the optional course, listening to the teacher to a variety of robot various introduction, I basically to intelligent robot a general understanding, also had their design utility of intelligent robot interest. And so, in the sense of the teacher, and some of the design life feeling a applicable to the people of the family clean robot, the following is I to this type of intelligent robot in the paper. 关键词:智能化,清洁,机器人 前言:人们常常会问为什么要发展机器人?要发展怎样的机器人?那些机器人适合我们人类生活?其实,机器人分很多种:有军用机器人、生活机器人、医用机器人、农业机器人、微操作机器人等等,毫无疑问它们都是智能化的机器人,它们的出现就是要满足人们各方面的需求,给人们带来便利。最早的机器人出现在1959年,就是说机器人的历史并不算长,但它的发展速度确是飞快的人们都热衷于生产出各式各样适合人们使用的机器人,从以前的机械化到现在的智能化,机器人已发生了很大的变化。在现在的二十一世纪里,人们对生活质量以及对工作的要求促使着智能机器人的发展,机器人可以替人们干那些人干不了、干不好的工作。生活中有些工作会对人体造成伤害,比如喷漆、重物搬运等;有些工作要求质量很高,人难以长时间胜任,比如汽车焊接、精密装配等;有些工作人无法身临其境,比如火山探险、深海探密、空间探索等;有些工作不适合人去干,比如一些恶劣的环境、一些枯燥单调的重复性劳作等;这些都是机器人大显身手的地方。服务机器人还可以为您治病保健、保洁保安;水下机器人可以帮助打捞沉船、铺设电缆;工程机器人可以上山入地、开洞筑路;农业机器人可以耕耘播种、施肥除虫;军用机器人可以冲锋陷阵、排雷排弹…… 所以说,机器人已经成为现代生活工作不可缺少的一部分,与人们的生活密切相关。灵感来自平常生活,人们都不大热衷与做家务,有些人觉得烦,有些人则没时间做,与其这样子,为什么不设计生产出可以做家务、搞清洁的智能机器人呢?智能清洁机器人可以帮你清洁你的家居,帮你完成各种烦心的清洁任务,给人们一个干净、清洁、舒适的家。 正文:
智能客服系统解决方案
xx汇联智能客服系统 解决方案 一、背景 随着移动互联网时代的到来,终端设备从传统的PC、电视、电话到新的智能手机、pad、穿戴设备等层出不穷,接入渠道从传统的网点、电话、网站、邮件到即时通讯、微博、微信、SNS等不断涌现,网络信息呈现出碎片化、移动化、实时化、个性化、多媒体化、大数据化的特点。一方面,对于信息服务提供商:全渠道的信息及资源,需要快速梳理并形成知识库,以便更好更及时的为客户服务;另一方面,对于信息的使用者:越来越快节奏的生活,价值移动互联全媒体时代来袭,使得人们对于服务提出了更高的要求:要求及时、快速、准确的全渠道服务。这就给信息管理和服务带来全新的挑战,传统的呼叫中心、客服中心已经面临无法承受之重。 与此同时,人工智能领域的智能机器人技术,在近年取得长足发展,与基因工程、纳米科学一起被称为21世纪三大尖端技术,是基础性、战略性的技术,能够对生产生活方式产生革命性的影响。 基于在政府、企业、金融等行业的多年行业经验积累,xx汇联采用多种人工智能技术,专门针对政府、企业、金融等特定领域,成功
开发出微喂智能机器人系统。系统支持自然语言人机交互,支持面向互联网、微信、移动APP等全渠道,支持语音识别和语音合成等技术。 二、系统特点介绍 丰富的行业背景,服务更专业 依托xx汇联领先的行业内容管理解决方案,借助三千多家行业客户项目的交付运维经验积淀,xx汇联智能机器人凭借预置的领域知识,应用多种人工智能技术和知识工程方法,深入理解用户问题的内在语义,挖掘用户真正关心的答案,xx推荐用户可能感兴趣的相关知识,可以跟用户进行各种语境下的多轮对话,与同类产品相比,更加专业,更加智能。 本体类方法,知识库构建更敏捷 xx汇联智能机器人,凭借新一代的知识本体类方法,从更符合人类思维的角度,将现实世界中的概念及概念之间的关系抽象为实体和方法,通过实体完成知识实例的积累,通过方法实现知识表达的丰富,能够基于客户历史数据更快速地完成知识库构建,相比同类产品,知识库构建周期缩短30%。 全方位问题解答,答案更丰富
关于智能清洁机器人的商业价值
关于智能清洁机器人的商业价值 一、智能家居系统的发展前景 在许多人的概念里,智能家居系统这个词离我们的生活似乎异常遥远,只是存在于高科技展览会里的表演,或是富豪们向人们炫耀财富而展示的一种家居装饰,可是他们没有意识到的是,在我们生活的周围存在着很多智能家居的影子。所谓的智能家居系统一般包括安防、电话、影音、空调、灯光等等各个方面,一整套完整的智能家居系统可以满足自己居家的各种需求。随着科学技术的不断进步、人民生活水平的不断提高、人们生活质量也越来越好,人们追求高品质住房的要求也不断提高,而家居智能化概念的普及,智能化装修的观念必将深入人心,事实上,近年来智能家居系统已开始一步一步走进越来越多的普通家庭。家居智能化装修的选择必将是大势所趋。可以说,也许就在不远的将来,家居智能化必然是生活中一个最基本的要求,如果您家没有进行智能化装修,那将是一件让人感觉不可思议的事情。智能家居有未来,而且一定会很好的服务中国人民。消费者在享受智能化的时尚生活的同时也给他们带来简单、方便、快捷。 也许有的人不一定相信未来的家庭装修将是智能化的天下,但是从不同角度分析之后,这种怀疑将不复存在。一、从发展趋势上来说:根据十一五规划纲要的要求,国家着重强调了住宅建设要做好节能减排、绿色建筑、智能建筑的要求,中央也不断加大了财政与政策支持,提出了“到2010中国大中城市60%的住宅要实现智能化”这一发展目标。因此,住宅智能化必然会是未来住宅建设发展的趋势,而住宅的智能化即意味着家庭的智能化。同时,之前已经提到过,现代社会在不断地发展着,与此同时人们的生活水平与生活质量也在不断的提高,可是随着社会的发展,普通的家庭装修已经无法满足人们的日益增长的对于生活水平提高的要求,人们追求高品质住房的要求不断的提高,而家居智能化概念的普及,智能化装修的观念正好迎合了人们的需求,所以说,家庭装修的智能化必将深入人心,也必将是众望所归的。到那时,家居智能化必然是生活中一个最基本的要求,如果您家没有进行智能化装修,那么就好像现在您家没有安装宽带一样,让人无法接受。智能家居有美好未来,这将是毋庸置疑的。 二、以人为本:智能家居系统的产品与家庭的日常生活息息相关,功能单一化、操作复杂化的产品不是智能家居的最终归途,智能家居系统的产品未来的趋
智能清洁机器人的商业价值
智能清洁机器人的商业价值 一、智能吸尘机器人占据未来市场的可能性 作为清洁设备的一个做组成部分,智能吸尘机器人同样有着广阔的发展前景,随着人们日益提高的生活水平,人们对于享受生活的要求也就越来越高。家庭清洁-一项家庭日常必需做得工作,费时费力,很多人都希望可以简单而又轻松的完成这一项工作。故而,智能吸尘机器人有了其存在的市场价值。并且随着越来越多的人需要它,它的存在价值以及发展潜力也就越来越大了。 相比于普通的吸尘器,智能清洁机器人与其相比存在着很大的不同。智能吸尘机器人存在内置智能芯片,可以自动识别判断家庭环境,通过算法来计算行走路径,通过物理或者光学感应来检测家中灰尘的位置并能够自动清扫地板上的灰尘,清理毛发和碎物,并且在清扫任务完成后,智能吸尘机器人可以自动返回充电。而使得智能吸尘机器人可以做到这样的原因就是智能吸尘机器人内置的智能芯片以及提前下载拷贝到芯片中的程序。 在组成部分上,智能吸尘机器人与传统的吸尘器有着很大的不同:1、传感部分:相当于人的五官,起到对外界的感知作用。2、控制部分:相当于人的大脑,起到连接对肢体的支配。3、驱动部分:相当于人的肢体,被控制起到协调作业。4、吸尘部分:在智能吸尘器里面嵌入真空吸尘器部分。5、电源部分:提供机器所需要的动力系统。可以说,除了吸尘部分与传统的吸尘器有共同点之外,用户无法从智能吸尘机器人上找到一丁点吸尘器的影子,而这些正是在未来智能吸尘机器人可以取代吸尘器的原因。 在功能方面,智能吸尘机器人更加适合未来用户关于家庭清洁方面的要求,比如:1、智能清扫:仅仅只需要按下启动,无需人工辅助,智能吸尘机器人便可自动进行吸尘工作遥控清扫,用户可以通过红外线遥控感应器,随时遥控,随时清扫。2、超薄机身:可以直接切入家具底部进行清扫。在不工作时,可以放在任何地方,不占用太大的空间。3、自主导航:由于智能吸尘机器人的内置智能芯片以及算法的缘故,智能吸尘机器人可以采用不同的
智能聊天机器人(AI Chat Bot)帮助跨境电商大大降低海外客服人工成本
无论是大型跨境电商,还是跨境小电商卖家,始终一定需要预算的一项运营成本就是客服。以一家典型面向美国市场的跨境电商为例,通过自建站和流量渠道(如Google Adwords,Facebook,Snapchat)面向美国消费者直接进行网站推广与产品销售,一定需要纯正的英语人工客服来处理产品的售前、售中、售后各项事宜。随着业务量越来越大,客服量一定也会相应增长,以单纯业务代表人员密集型为运营方式的客服中心人工成本也就会迅速增加。而在“黑五”圣诞这样的特别季节,客服量会呈几何级数增长,单纯用纯人工客服团队并非科学的选择。 其实,无论跨境电商规模大小,商家都可以借助"人工智能"的"洪荒之力",实现人工智能机器人与客人对话。借助智能化的客服机器人服务,将普通的重复性客服请求交给AI 机器人来处理,而人工客服资源集中则可专注在最有价值的服务内容上(例如安抚投诉、促成定单、交叉销售等)。这种聊天机器人与真人业务代表人机协作的混合模式可以做到自然流畅,准确可靠,是未来跨境电商客服中心发展的重要方向之一。 Callnovo跨境电商呼叫中心的技术团队能为世界各国跨境电商部署人工智能客服的Chat Bot 聊天机器人Chat Bot 聊天机器人客服的部署有以下特点:-首先,就是我们将自然语言处理和以神经网络为基础的深度学习人工智能技术应
用在跨境电商客服领域。因为有了深度学习的技术,我们完全可以打破人工配置问答匹配的规则,可以让客服系统有更好的自主学习能力和语义理解能力,包括可以处理客人非常口语化的问法,无论客人使用英式英语还是美式英语,聊天器都能自如理解并正确应答。 -Chat Bot机器人可以在多渠道上进行24小时不打烊的客服工作:例如Facebook Messenger,Skype,Twitter,手机短信,官网Live Chat等。 -人机协作:我们可以安排客人的问题,默认先由机器人客服来解答80-90%问题。 解答不了的问题怎么办?用户可一键点击之后转到人工客服来解答。或者我们可以安排当人工客服下班、不在线或者人工排队时,由机器人客服自动接替。 -边服务,边销售:传统的电商企业侧重销售,未来的电商趋势是侧重于服务。机器人客服可以以服务为基础,边服务边销售。例如当客人与某品牌官网上的客服机器人打字互动时,机器人可根据客人所提供的交谈信息内容,基于后台大数据为客人就个人品味与喜好提供更个人化的建议,挑选并推送对应商品或某程度的定制化的商品。 -丰富的对话元素:文字、图片、视频、链接、支付接口,以及第三方的数据资源都可以接通呈现在聊天机器人的对话框中。令服务生动,简化操作提高效率,增强体验。
人工智能与机器人
江西蓝天学院 人工智能与机器人 系别:机械系 班级:09热动本(1)班 姓名:艾立强 学号:109202020001 人工智能 最近看了电影《终结者》,对其中的科幻生活有了憧憬,然而现在的世界是否会如电影中一样呢?人工智能的神话是否会发生在当前社会中的呢? 人类正向信息化的时代迈进,信息化是当前时代的主旋律。信息抽象结晶为知识,知识构成智能的基础。因此,信息化到知识化再到智能化,必将成为人类社会发展的趋势。人工智能已经并且广泛而有深入的结合到科学技术的各门学科和社会的各个领域中,它的概念,方法和技术正在各行各业广泛渗透。 人工智能是研究使计算机来模拟人的某些思维过程和智能行为(如学习、推理、思考、规划等)的学科,主要包括计算机实现智能的原理、制造类似于人脑智能的计算机,使计算机能实现更高层次的应用。人工智能将涉及到计算机科学、心理学、哲学和语言学等学科。可以说几乎是自然科学和社会科学的所有学科,其范围已远远超出了计算机科学的范畴,人工智能与思维科学的关系是实践和理论的关系,人工智能是处于思维科学的技术应用层次,是它的一个应用分支。从思维观点看,人工智能不仅限于逻辑思维,要考虑形象思维、灵感思维才能促进人工智能的突破性的发展,数学常被认为是多种学科的基础科学,数学也进入语言、思维领域,人工智能学科也必须借用数学工具,数学不仅在标准逻辑、模糊数学等范围发挥作用,数学进入人工智能学科,它们将互相促进而更快地发展。
当前人工智能的发展方向可以分为两种:一种是由知识工程师将 有关的知识归纳、整理,并且表示为计算机可以接受、处理的方式输入计算机。另一种是使计算机本身有获得知识的能力,它可以学习人类已有的知识,并且在实践过程中不总结、完善。 人工智能并不像很多人想象的是几个科学家的工作,而是随着社会各学科发展而默默发展的。在智能领域里,最关键的问题之一,就是机器学习的问题。一旦机器有了学习的能力,谁还(敢)预测未来呢?人类的社会发展其实也是在不断积累中发展而来,人的智能也就是事实依据库+推理机制所构成了的。当所有领域的定律都能用特定的公式推理出来,《终结者》的实现就要到来了。 研究人工智能的目的,一方面是要创造出具有智能的机器,另一方面是要弄清人类智能的本质,因此,人工智能既属于工程的范畴,又属于科学的范畴。通过研究和开发人工智能,可以辅助,部分替代甚至拓宽人类的智能,使计算机更好的造福人类。 目前,人工智能的研究是与具体领域相结合进行的。基本上有如下领域; 一、专家系统 专家系统是依靠人类专家已有的知识建立起来的知识系统,目前专家系统是人工智能研究中开展较早、最活跃、成效最多的领域,广泛应用于医疗诊断、地质勘探、石油化工、军事、文化教育等各方面。它是在特定的领域内具有相应的知识和经验的程序系统,它应用人工智能技术、模拟人类专家解决问题时的思维过程,来求解领域内的各种问题,达到或接近专家的水平。 二、机器学习 机器学习的研究,主要在以下三个方面进行:一是研究人类学习的机理、人脑思维的过程;和机器学习的方法;以及建立针对具体任务的学习系统。
智能清洁机器人国内外发展状况浅析
146 研究与探索Research and Exploration ·探讨与创新 中国设备工程 2018.02 (下) 智能清洁机器人集机械学、电子技术、传感器技术、计算机技术、控制技术、人工智能等诸多科技为一体,不仅是一种环保、智能型的服务机器人,还具有良好的应用前景和广泛的市场需求,近年来智能清洁机器人的发展和应用受到国内外的广泛重视,其技术越来越成熟,应用也越来越广泛。 1?国内外发展情况 1.1?国内相关研究情况 黑龙江八一农垦大学尧李慧、田雷与黑龙江省农业机械工程科学研究院蔡晓华、侯云涛对牛舍清洁机器人的结构与避障设计进行分析与研究,并结合迂回式路径规划算法和靠墙或牛栏等障碍物的避障策略,实现清洁机器人对牛舍的全方位清扫工作。 中国计量大学的郑哲恩、孙坚、沈斌,利用工业相机拍摄粉尘,经过MALTAB 处理之后对粉尘面积进行计算,并利用清洁机器人进行清洁,根据清洁效率计算得出清洁机器人的清洁性能。 解放军理工大学国防工程学院茅靳丰、朱国栋、张虎、宋威,根据风管机器人视觉检测系统的组成,包括照明系统、摄像头、图像采集卡、图像采集软件以及图像分析软件,利用Matlab 的图像处理功能对采集到的风管内部图像进行预处理,并依据特定的算法对其清洁度进行评估。 东南大学的陆晓敏,吴浩真,韩可炯,秦家晨设计了一种基于MSP430f149 的智能清洁机器人系统。机器人依靠车体的风机装置吸附在玻璃上,可以自动完成路径规划、探测窗户的边角距离、自动清洁窗户。实现使用设计的机器人来代替人进行高空作业,在高层建筑中对外壁玻璃上的粉尘和其他污物进行清洁。 东北林业大学的王振秋、薛建琪、张宇崴、狄海廷针对变直径杆件,设计一种爬杆清洁机器人。模拟人的上肢和下肢,轮流夹紧杆体,在曲柄连杆机构的驱动下,实现机器人的攀爬运动,在机器人攀爬过程中实现 自动清洁。 广东技术师范学院天河学院的陈朝大和广州航海学院的吕志胜针对红外避障检测和绝对定位的局限性,对智能寻迹的清洁机器人进行研究。机器人采用超声波传感器配合伺服电机构成自动避障系统,对室内未知环境进行探测,提出了多路径融合规划控制算法,使机器人能够完成自主全区域覆盖行走。 由此可见,国内智能清洁机器人研究主要集中在对障碍物的躲避以及特殊区域的清洁方面,研究应用范围主要包括高空清洁、管道清洁、牛舍清洁等,对更为复杂环境的清洁能力检测方面研究较少,利用静态图像进行分析和评估以及终端特殊机械机构的设计是目前主要的技术研究方向。1.2?国外相关研究情况 由新加坡国际和南洋理工大学控制专家Elid 开发的机器人技术系统Outobot,展示了一个能够清洁和油漆高层建筑外部的机器人,声称提供一个更安全和更有效的替代人工清洁的方法,清洁水平达到了一个新的标准。 韩国的Jin-Ho Suh 等人发明了一种更为高效的水下清洗机器人研制平台,平台可用于研制和设计可满足应用在工业清洁工作领域中的水下清洗机器人性能,所开发水下清洁机器人的方法,可用于实现清洗不同类型的工业水箱的功能。 英国的Jo ?ao Mouraa B 等人提出了一种驾驶室前清扫机器人的控制和路径规划方法。所提出的解决方案包括研究机器人之间的相互作用机械手联合清洁一个未知的表面,并在制定操作空间的实施的同时,通过力和位置控制末端执行器的轨迹,从一个光栅实时的扫描到被清洁表面与局部的自适应路径表面几何的细微差别。 英国的Tetsuo Tomiyama 等人介绍了列车驾驶室前部清扫机器人的系统和概念设计方法。对现行程序进行分析,发现过程中可能出现的空白,并产生一个满足这些要求的清洁系统概念设计的要求清单。提出的解决方案包括系统在不同子系统中的划分,每个子系统的不 智能清洁机器人国内外发展状况浅析 褥铜,赵晨 (顺德出入境检验检疫局技术中心,广东?佛山?528303) 摘要:通过分析智能清洁机器人的国内外发展状况,为相关企业做技术研发方向提供服务,对于提高我国智能清洁机器人生产企业的技术水平,以及提升我国在国际智能清洁机器人市场的竞争力有着积极的意义。 关键词:智能清洁机器人;国内;国外;发展状况 中图分类号:F416 文献标识码:A 文章编号:1671-0711(2018)02(下)-0146-02
人工智能与机器人制造培训心得
1月19日,2018人工智能与机器人开发者大会在浦东新区申港大道200号F区三楼多功能厅盛大开幕,以“知时代,智未来”为主题。该大会聚集和整合各种人工智能领域创新人才,弘扬科学精神,激发全面创新的热情;同时,培育一批技术智能与机器人开发顶尖研发团队,引导各界力量支持创新人才,搭建服务创新团队的平台。会议中邀请了人工智能和机器人领域的专家和众多的企业负责人参加,一起讨论在这个飞速发展的时代,怎么结合人工智能去创造无限的可能 一、人工智能技术前瞻 再会期间了解到了人工智能以及机器人相关的前沿技术和创新思路,当前社会对于人工智能和机器人等词频繁使用,炙手可热。依托百度、腾讯、阿里巴巴、科大讯飞,基于加强机器人创新发展的人工智能创新平台和加强机器人共性关键技术研究,建立完善机器人标准体系及检测认证平台。伴随着机器人技术的突飞猛进,两大平台也开始全面实施。在会议上胡洁教授讲到这么一句话,“智能制造是系统工程,人工智能是锦上添花”现在是要将原来人工智能辅助创新设计发展为人工智能驱动创新设计。目前应用人工智能现状大部为给定一个具体的方案使机器人按照给定的方案去工作,人工智能的另一个境界也就是现在我们发展的目标。要是人工智能通过自己的学习去创新,使人工智能可以做到用自己的方式学习,用自己的方式预测与创新。 二、智能制造的应用 也许人工智能听起来会比较科幻,缺少实际性,在本次会议中不仅仅是对于学术上的交流,有很大一部分是人工智能在生活中,工业上的实际应用。 1、Tesla&Google 随着技术的快速发展云计算、大数据、人工智能一些新名词进入大众的视野,作为人工智能等术在汽车行业、交通领域的延伸与应用,无人驾驶受到了广泛的关注。 2、仿人机器人 仿人机器人顾名思义,就是像人。仿人机器人理论上可以在形态、行为和思维上像人但
智能客服系统解决方法.docx
中科汇联智能客服系统 解决方案 一、背景 随着移动互联网时代的到来,终端设备从传统的 PC、电视、电话到新的智能手机、 pad、穿戴设备等层出不穷,接 入渠道从传统的网点、电话、网站、邮件到即时通讯、微博、微信、 SNS 等不断涌现,网络信息呈现出碎片化、移动化、实时化、个性化、多媒体化、大数据化的特点。一方面,对于信息服务提供商:全渠道的信息及资源,需要快速梳理并形 成知识库,以便更好更及时的为客户服务;另一方面,对于信息的使用者:越来越快节奏的生活,价值移动互联全媒体时 代来袭,使得人们对于服务提出了更高的要求:要求及时、快速、准确的全渠 道服务。这就给信息管理和服务带来全新的挑战,传统的呼叫中心、客服中心已经面临无法承受之重。 与此同时,人工智能领域的智能机器人技术,在近年取得长足发展,与基因工程、纳米科学一起被称为21世纪三大尖端技术,是基础性、战略性的技术,能够对生产生活方式产生革命性的影响。 基于在政府、企业、金融等行业的多年行业经验积累,中科汇联采用多种人工智能技术,专门 针对政府、企业、金融等特定领域,成功开发出微喂智能机器人系统。系统支持自然语言人机交互,支持面向互联网、微信、移动APP 等全渠道,支持语音识别和语音合成等技术。 二、系统特点介绍 丰富的行业背景,服务更专业 依托中科汇联领先的行业内容管理解决方案,借助三千多家行业客户项目的交付运维经验积淀,中科汇联智能机器人凭借预置的领域知识,应用多种人工智能技术和知识工程方法,深入理解用户问题的内在语义,挖掘用户真正关心的答案,关联推荐用户可能感兴趣的相关知识,可以跟用户进行各种语境下的多轮对话,与同类产品 相比,更加专业,更加智能。 本体类方法,知识库构建更敏捷 中科汇联智能机器人,凭借新一代的知识本体类方法,从更符合人类思维的角度,将现实世界中的概念及概 念之间的关系抽象为实体和方法,通过实体完成知识实例的积累,通过方法实现知识表达的丰富,能够基于客户历史数据更快速地完成知识库构建,相比同类产品,知识库构建周期缩短30%。 全方位问题解答,答案更丰富 中科汇联微喂智能机器人通过知识库、集成业务系统数据库、集成企业级搜索三种答案途径,为用户提供全方位的解答,针对不同类型的问题,提供不同形式的的解答,满足用户的全面需求。 富媒体丰富展示,体验更智能 中科汇联微喂智能机器人与用户的交互方式包含文字、图片、语音、视频、附件等各种富媒体形式,当客户 提出的问题答案包含图片、视频等多媒体内容时,直接在答案中进行展示,给客户提供更丰富、更智能的使用体 验。 多轮对话,答案准确性更高 中科汇联微喂智能机器人,机器人推理和判断能力,解决人与机器交互过程中的信息不全、指代消解的问题,对于不理解的问题,使用多轮会话的方式,精准定位问题,提供标准答案,保证答案的准确性。 全线渠道支持,服务更便捷 系统提供权限渠道支持,保障系统使用单位对于用户的服务更有力度,用户可以通过过Web、微信、移动APP、邮件、电话、短信,随时随地与跟智能机器人进行实时交互。 机器人 +人工,成本更低
中国服务机器人的发展现状
中国服务机器人的发展现状以及对未来的展望 服务机器人是一种半自主或全自主工作的机器人,它能胜任大概80多个细分领域的服务型工作,但主要的应用场景有清洁、陪护、教育、医疗、迎宾、巡检等等场景。不同于从事生产作业的工业机器人,服务机器人对于应用场景的复杂性有着更高的要求。 服务机器人的市场前景 近年来,服务机器人在国内外市场的增速越来越快,预计2018年到2020年,全球的服务机器人平均将会有30%以上的持续增速。单2017年一年,全球的服务机器人销量就达到了900万台,约有70亿美元的市场空间。而中国在2017年一年的服务机器人领域也有12.8亿美元的市场份额额,占全球市场规模的20%左右。中国基本占了全球五分之一的服务机器人市场份额,同时增速高于全球平均水平,大约能达到40-50%。对于中国服务机器人的现状,中国服务机器人的投资数目巨大,且增长速度不断攀升,总共投资金额也高达694亿人民币。可以说,中国的服务机器人行业相当景气。 中国服务机器人企业的现状 在性能方面,服务机器人被看重的就是交互能力。所谓的交互能力,主要包括了自然语言处理和图象的处理,其相当于人类在图象、声音的感知能力。服务机器人的性能好不好,主要看的是其产业链完善不完善。服务机器人的产业链基本可以分为上中下三个层面,上游就是核心零部件,包括芯片、算法、激光雷达;中游就是功能模块,属于人工智能的领域;下游基本上是应用的各个不同的细分市场。 中国服务机器人的新方向 清洁机器人为什么市场做得那么好?工作场景相对封闭,交互的需求比较少;第二,清洁机器人完全可以替代吸尘器;第三,减少人类的劳动,满足人类
的不愿进行单调枯燥的劳动的需求。通过对清洁机器人的分析,接下来教育机器人可能会成为中国服务机器人的新方向。原因如下,首先,教育机器人的工作场景也相对封闭,交互需求少;同时教育机器人能够完全取代现在市面上的学习机;由于中国人对教育的迫切需求,教育机器人能充分满足。 国内的机器人企业也越来越多,在服务机器人领域,发展较为可观的有杭州国辰机器人,其迎宾机器人产品目前已经是国内服务机器人行列中名列前茅的。由此可见,国内的服务机器人产品性能基本已经可以实现大多数企业的需求。无论是平台型还是应用型企业,在中国服务机器人发展势头迅猛的大背景下,都在不断实现弯道超车。相信未来中国在服务机器人领域还将会收获更好的成绩。
基于AT89C51的智能清洁机器人设计
第24卷 第5期 2008年3月 甘肃科技 Gansu Science and T echnolo gy Vol.24 N o.5M ar. 2008 基于AT 89C 51的智能清洁机器人设计 韩 珩,张 波 (沈阳化工学院,辽宁沈阳110142) 摘 要:设计一种基于AT 89C51的智能清洁机器人系统,介绍了机器人总体设计、各组成部分及系统软件设计。该系统包括主控模块、执行机构以及传感器模块等几个子系统,以通用性和功能完备为目标使机器人具备了智能清洁的能力。 关键词:清洁机器人;单片机;传感器;红外遥控中图分类号:T P242 1 机器人的总体设计 总体设计目标是设计一个具有自主清扫、避障、卡住报警、尘仓满仓检测等功能,能够在无人干预情况下自主完成室内清扫工作,也可以人为通过红外遥控器控制其状态的机器人系统。同时,为使机器人高效、可靠地完成作业,在其内部嵌入路径覆盖算法,使它脱离随机清扫的模式,能够记忆已走过的路径和遇到的障碍物位置,不遗漏地进行全区域清扫和不重复遇到同一个障碍物,实现高覆盖率、低重复率的清扫过程。 2 机器人的组成结构 机器人由5部分组成:系统主控制部分、执行电机部分、传感器部分、输入输出部分和电源部分。主控系统使用单片机AT 89C51控制,包括红外遥控接收模块,对输入输出器件的操作,对执行电机的控制,以及对传感器的响应等。执行电机部分是吸尘机器人的主要构成部分,包括行走驱动子系统和吸尘子系统。行走结构采用轮式结构,圆形壳体,底盘为三轮电动小车,前面两轮由两个电机独立驱动,后轮为万向轮。吸尘系统用电机带动清扫刷的转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造强大的吸力将灰尘吸入灰尘存储箱中。在清扫吸尘之后,利用安装在壳体下面的清洁布擦除残留在地面上的细小灰尘。轮子电机、吸尘电机和毛刷电机使用的都是无刷直流电机;传感器部分即检测子系统,主要为了保障机器人能够安全地工作;输入输出部分包括遥控子系统和显示子系统,能够较好地实现人机交互的功能;电源部分采用可充电的12伏锂电池。 2.1 系统的主控部分 本设计选用了A TL 公司生产的89C4051单片 机作为控制器。AT89C51与其它各部分电路的关系为[1]:通过红外接收模块接收来自遥控器的命令;通过各个传感器接收外部环境的状态信息;通过2路PWM 信号给电机提供电压,控制轮子的速度和方向;由I/O 口信号控制三极管进而控制继电器驱动清扫、吸尘电机;通过捕获2个电机编码器信号检测轮速;通过多个I/O 口控制LCD;利用串口变并口芯片控制多个LED 指示灯和按键等。系统结构如图1所示。 2.2 执行电机部分 机器人的行进电机由驱动电路放大后驱动,考