智能轮式房间清洁机器人调研报告
齐齐哈尔大学
毕业设计调研报告
题目只能轮式房间清洁机器人
学院通信与电子工程学院
专业班级电子信息工程072班
学生姓名段明
指导教师齐怀琴
2011年3月12日
智能轮式房间清洁机器人
1、概述
清洁机器人系统的基本结构一般包括四部分:控制系统、移动机构、感知系统、清洁系统[1]。随着计算机技术、人工智能技术、传感器技术、移动机器人技术的飞速发展,为清洁机器人的控制系统的研究和开发打下坚实的理论与技术基础以及美好的未来发展蓝图;感知系统依赖于传感器技术,一般常用的传感器有:CCD摄像机、超声波传感器、红外传感器、接近传感器和碰撞传感器等,感知外部的环境信息;移动机构是清洁机器人的本体,一般的结构有:轮式、履带式、步进式或其他方式,轮式和履带式适合移动在平整的地面上,步进式适合与条件较差的路面移动;清扫系统一般有:喷水器、地刷和吸尘器,喷水器向地面喷洒清水,地刷用于强力清扫地板上的吸附物,吸尘器吸取地板上较小的物体。近年来快速发展、深刻影响着清洁机器人进步的关键技术有:路径规划技术、传感器技术、吸尘技术、控制技术、电源技术等[2]。
2、选题依据和意义
在人类不断发展的文明中,科技扮演的角色越来越重要。尤其在当今世界,科学技术使人类的生活和思维方式不断变革,科技产品已深入到人类生活的个个角落。在控制、感知、驱动、材料等领域不断进步的技术背景下,机器人首次出现在制造领域之外的服务领域,开辟了应用机器人的新领域。服务机器人的出现有着深刻的社会因素,主要有三大原因:(1)、劳动力成本上升;(2)、人类想摆脱枯燥乏味的体力劳动,像清洁、家务、照顾病人等;(3)、人口的老龄化和社会福利制度的日益完善。服务机器人有着比较明显的特征:适合具体的方式、环境以及任务过程的一个机器人系统,活动范围广,非结构环境下移动性,所以大多数机器人是移动机器人[3]。
清洁机器人是一种能够自动执行房间清扫的家用服务机器人,集中了机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能技术等多学科。开始于20世纪80年代的研究,现在已经有多重样机和产品,并且促进了家庭服务机器人行业的发展,也促进了移动机器人技术、图像、语音识别、
传感器等技术的发展。许多发达国家都将其视为机器人研究的新领域给予重视。有关资料也预测清洁机器人是未来几年需求量最大的服务机器人,特别是日用清洁电器不论在市场上或者是在产品创新上,绝对是所有小家电产品中最活跃的,未来仍有很大的成长空间。
通过实验,学生不仅可以在轻松愉悦的氛围中充分理解相关课程的专业知识,而且会很自然的从机器人的整体、从系统工程的角度参与试验,增加对专业知识的学习兴趣,拓展知识面,寻找知识交叉点,培养独立开展科学研究的能力。
3、可行性分析
3.1、搜集资料
资料的搜集比较丰富,包括:核心期刊的论文、会议论文、学位论文、报纸、书籍、科技文献,还有互联网的电子杂志,世界各地知名机器人制造公司,比如德国Karcher、英国Dyson、澳大利亚Floorbotics、美国Eureka及irobot、Evolution瑞典伊莱克斯、荷兰飞利浦、robotic、韩国三星、LG、Hanool Robotics、台湾联腾电子等世界知名清洁机器人研发制造公司出产的产品,以及国内的KV8清洁机器人。
3.2 .1国外清洁机器人的发展现状
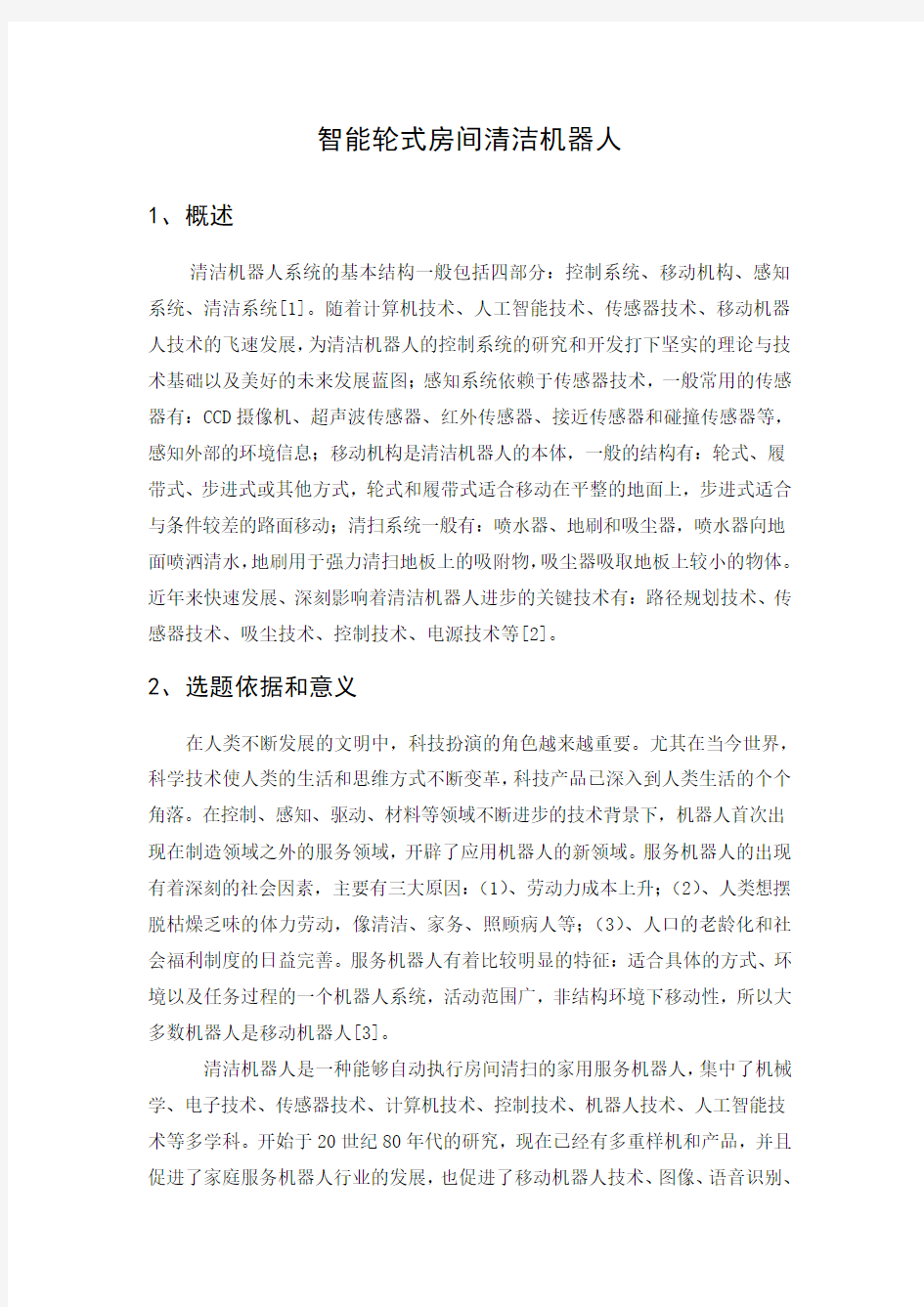
下图1是一种叫“三叶虫”的吸尘机器人,它是瑞典家电公司伊莱克斯经历12年,向市场推出的世界首台智能吸尘机器人。它被开启后,首先会依着墙角进行清扫工作,与此同时对清扫的房间进行扫描获取房间信息。机器人工作时,主要应用的是随机规划模式,也就是工作中会使用超声波传感器探测行进方向前方的障碍物,当探测到有障碍物时会自动选择躲避障碍物,然会自主选择新的清扫路径。工作过程中电量不足时,它会停止工作移动到充电器进行自动充电,充电完毕后,会返回到原来中断的清扫地点继续清扫工作。为了避免机器人跑到危险的区域,一般用磁条来限制机器人的移动空间,保护机器人上的安全。
图1 三叶虫吸尘机器人图2 Roomba吸尘机器人图2所示的机器人是美国iRobot公司研发的家庭清洁机器人。“Roomba”可以运行三种模式:S模式、清扫大约3~4平方米,工作20分钟;M模式、清扫大约6~7平方米,工作30分钟;L模式、清扫大约8平方米以上,工作40分钟。在设置清扫模式之后,“Roomba”会执行螺旋清扫路线,通过碰撞探测障碍物。当碰撞障碍物后,会顺着障碍物前行,移动一定距离后,会自动转动90度,并不断重复上面的过程。这样循环的进行,一直到清洁完成,然后停止工作。通过“虚拟墙”设置一个对机器人有阻隔作用的墙壁,一控制机器人的活动空间。“Roomba”的环境适应性比较强,能够在家具的缝隙间自由移动,动作灵巧快捷。“Roomba”的最大特点是吸尘构造,不但有真空吸口,还有底部的旋转滚刷以及侧部的旋转毛刷,这些都强化了清洁去污能力,补偿了洗尘功率的不足。另外,还能够检测污垢情况,进行多次的清扫工作。
图3是2003年5月日本的日立公司亮相的智能真空机器人,预定价格约1.35万人民币,其身长直径25cmX身高13cm,总重4kg,是世界上当时最小的吸尘机器人。移动最快速度是40cm/s,清扫面积是10平方米,大约耗时10分钟,障碍物假定是3个,通过遥控器或机身进行操作。吸尘机器人装有CCD相机,可以经过手机连接家用电脑查看房间清洁情况。清扫工作结束后,自动回到“充电/垃圾回收站”,补充能量并处理垃圾。在机身下部,装有移动伸缩的自由洗尘口,可深处5cm左右,当移动到一些角落或者狭窄区域时,可最大化清洁地面,不留任何死角。
图3 日本日立的吸尘机器人
图4 吸尘机器人VC-RP30W
图4一种交新型吸尘机器人,由韩国Samsung公布。这种机器人使用交新型3D地图影射技术定位自身位置,操作者能够连接任意电脑互联网计算机操作自己的清洁机器人。机器人顶部安装有摄像装置用于时时检查家庭清洁状态。VC-RP30W配置有自动充电设备,机器人清扫过程中电压不足时会自我检测到,及时的进行充电,结束充电后,会继续进行前面的清扫工作。整个清扫工作结束后,该机器人会释放负离子,净化空气,充当空气清新机的功能。此机的价大约是3000美元[4]。
3.2.2 国内吸尘机器人发展现状
哈尔滨工业大学在此领域的探索工作开始于90年代,前后负责国家863
高科技计划资助项目-高楼壁面清洁爬壁机器人的研究任务,完美的做完了样机的研制工作。哈尔滨工业大学和香港中文大学联合,开发一种全方位移动清洁机器人,安装的万向轮可任意方向移动,开放式控制结构,软件可移植,硬件可拓展,时时臂障功能,增强的清洁机器人的环境适应能力。
1999年,浙江大学的机械电子研究所开始只能吸尘机器人的研发工作。我国首台低级智能清洁机器人两年以后成功问世。此类机器人执行清扫,第一学习环境,也即是依靠超声波传感器检测障碍物的距离,而且离墙壁有固定的一段距离,依据这些角落的清扫信息,计算房间的面积,根据这些信息计算清洁工作的时间,随后,基于局部遍历规划与随机规划汇合的方法进行计算最佳的移动清洁路线,打扫工作完成后,也会进行自主充电。
3.3 吸尘机器人关键技术
3.3.1、路径规划技术
大概有三种类型:
(1)基于模型的路径规划
(2)基于传感器信息的路径规划
(3)基于行为的移动机器人路径规划[5]
3.3.2、多传感器融合技术
主要方法有:
(1)Kalman滤波法
(2)统计决策法
(3)模糊逻辑法
(4)Bayes估计法
(5)D-S推理法
3.3.3、定位技术
现阶段有3中方法:
(1)基于编码器、陀螺仪等传感器计算单位时间内机器人方位变化,不算累计,计算时时方位信息。
(2)基于上面的方法,引进外部坐标,消除航位的推测累积误差。
(3)紧密结合定位、环境感知和环境建模,独立在具体工作环境中。
3.3.4、吸尘技术
(1)传统真空吸尘器
此种真空吸尘器是在机体内部有高速旋转的风扇作用下形成真空而出现从外到内部强大的气流,由吸口将灰尘吸入内部的滤尘袋中[6]。
(2)气流滤尘器
这种吸尘器是利用附壁效应产生低压涡流气体,最终将灰尘阻隔在吸尘器内部的涡流腔里。
(3)静电吸尘器
这种吸尘器利用含有粉尘颗粒的气体,通过高压电场时,产生气体离子,带电尘粒则沉积于阳极板上,而得到净化的气体排出防尘器外。
3.4 吸尘机器人系统开发
目前,大多数投入市场的清洁机器人在清洁能力方面,都各不同,尤其是整个吸尘机器人系统的设计上,都有所不同。但房间清洁机器人基本的结构组成还是基本一致的,控制系统一般采用微型计算机,移动机构几乎全是轮式,感知系统都采用多传感器融合技术,吸尘系统应用成熟的吸尘器,从从清洁机器人基本的结构上在进行其它方面的工能拓展,可以进一步提高自动清洁的能力。因此,根据现有的清洁机器人市场的成型产品,以及现有的设计清洁机器人各方面的理论和技术,完全可以设计出拥有基本功能的清洁机器人。
3.4.1 控制器
控制器采用Atmel公司AT89S52,它是一种低功耗、高性能CMOS 8位微控制器,具有8K 在线系统可编程Flash 存储器。使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。片上Flash允许程序存储器在线系统可编程,亦适于常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在线系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案[7]。
3.4.2 路径规划
路径规划采用随机遍历规划,它是机器人无法直线行进时就会随即转一个角度继续直线前行。此法无需定位传感器,且算法简单。目前,家用清扫类机器人大都采用此种规划法[8]。
3.4.3传感器
传感器使用超声波传感器,它由发射探头发出信号碰到目标后会产生反射,再由接受探头接受反射回的信号,根据接受与发射间所需时间以及声速,确定发射探头与目标的距离。它既能探测到障碍物的存在,还能测出距离,而且不受光线变化的影响。[9]
4 结论与展望
虽然当前的吸尘器是物美价廉,能给人们枯燥乏味的家庭清洁的琐碎工作提供了诸多方便,可是一些缺点仍旧困扰着人们,比如较大的噪声依然让多数的家庭使用者望而却步。在现有的服务机器人领域里,吸尘机器人可以说是一种新型产品,帮助人们在无需照看的情况下省时省力的完成房间的洗尘清扫作业。所以,只要清洁机器人的生产成本兼顾日用家电的大批量、低价格的特点,吸尘机器人将会用诱人的市场前景[10]。
目前国内与国外的吸尘机器人的研究与开发工作都取得了一些成绩,但是仍旧有许多问题需要解决或改善,主要涉及到下面几个方面:
(1)格过高
(2)智能化与自主化程度低
(3)吸尘技术不够理想
(4)自动充电与电源技术有待改进
伴随着吸尘机器人的关键技术与性价比的不断提高,完全有条件基于现有的硬件和软件技术,在不久的将来,生产出价格便宜的全自动吸尘机器人,使千家万户都能够使用到,从而使这种高新技术产业带来客观的市场和经济效益。
参考文献
[1] 朱时强,刘瑜,庞作伟,金波.自主吸尘机器人的研究现状[A].机器人.2004,26(6).
[2] 胡跃明,丁维中,无忻生.吸尘机器人的研究现状与展望[A].计算机测量与控制.2002,10(10).
[3] 李瑞峰,孙笛生等.移动式作业型智能服务机器人的研制[A].机器人技术与用.2003 (1).
[4] 李磊,叶涛,谭民.移动机器人技术现状与未来[A].机器人.2002 (5).
[5] 李开生,张慧慧,费任元,宗光华.具有便利特性的移动机器人规划方法研究[A].机器人.2001 (11).
[7] 张培仁.基于C语言编程MCS-51单片机原理与应用[A].2002.
[8] 邱雪娜,刘士荣,宋佳涛,Simon X YANG.不确定动态环境下移动机器人的完全路径规划[A].机器人.2006,28(6).
[9] 朱勇.基于超声波传感器测距的沿边走吸尘器路径规划算法[A].机器人技术与应用.2002 (1).
[10] 吴秋轩,曹广益.家用服务机器人的发展与现状[A].电气传动自动化.2003,25(6).
客房清扫流程及标准
客房清扫流程及标准 一、准备工作 (1)检查工作车上客用品及工具是否齐全。 (2)将工作车靠墙放置,不要离门太近,以免妨碍他人。 二、进入房间 1.按门铃、敲门 (1)首先检查一下房门是否挂着“请勿打扰”牌或上“双锁”。 (2)轻轻敲三下门,声音不要太大,使客人听到为标准,同时报身份“服务员”。 (3)在门外等候10秒钟,倾听房内动静,如无反应,可重复以上程序两遍。 2.开门 (1)在确认房内无动静后,使用钥匙将门轻轻打开2~3寸报明自己的身份,询问“可以进来吗?”后方可进入。 (2)如果客人在房内,要等客人开门后或经客人同意后方可进入并向客人问候,询问客人“是否可以打扫房间”。 3.开窗户 (1)拉开窗帘。 (2)打开窗户。 三、巡视检查 (1)打开所有照明灯具,检查是否完好有效。 (2)检查和调节空调到适当温度。
(3)巡视门、窗、窗帘、墙面、天花板、地毯、电视、电话及各种家具是否完好,如有损伤,及时报告领班报修,并在“客房清洁报表”设备状况栏内作好记录。 (4)检查有否遗留物品,若有发现,应立即上报并作好记录。 四、清洁垃圾 (1)将房内的垃圾桶及烟缸内的垃圾拿出倒掉前,应检查一下垃圾桶内是否有文件或有价值的物品,烟缸内是否有未熄灭的烟头。 (2)清洁垃圾桶和烟缸,确保垃圾桶及烟缸干净无污迹。 (3)清理脏布品 1、将客人放在床、椅等处的衣服用衣架挂起,吊入衣橱内。 2、换下床上的床单、被单、枕套,连同浴室内需要更换的四套巾(浴巾、面巾、小方巾和足巾)一起,分类点清放入工作车的布品袋内,发现有破损的布品和毛巾,应分开存放(若客人放置了环保卡则床单、被单、枕套等床上用品不必更换)。 3、同时取出有客衣的洗衣袋。 4、从工作车带进干净的布品。 五、做床 1.铺床单 正面朝上,褶线居中,两边匀贴,床单四角拉平包严(注意:铺床时不要用手梳理自己的头发,防止头发掉入床单)。 2.铺被单
关于智能扫地机器人的市场调查报告以及总体设计
关于智能扫地机器人的市场调查报告以及总体设计 杨浩荣王健聪 (北京理工大学珠海学院电气工程及其自动化系) 引言:机器人技术作为20世纪最伟大的发明之一,自上世纪60年代问世以来,已获得巨大的进步。在机器人技术不断成熟的今天,机器人在工业领域大放异彩的同时,它已快速地在农业、军事、服务等非工业领域不断拓展,并取得一定的成果。 关键词:市场需求智能扫地机器人寻路算法 Market research report on intelligent robot sweeps the floor, and the overall design Yang Haorong Wang Jianlin Abstract:robot technology as one of the greatest inventions of the 20th century, since the 1960 s, has acquired great progress. In today's robot technology continues to mature, to shine in the field of industrial robot at the same time, it has quickly in non-industrial sectors such as agriculture, military and service development, and achieved certain results. Key words: market demand intelligent sweeping robot pathfinding algorithm 1.市场需求及其调查: 作为新兴的朝阳产业,机器人出现的时间虽然短暂,但是对社会的影响是巨大的,对人类的影响也是深远的。其中,服务型机器人因更为贴近人类的生活已经有越来越多的大企业把目光投注到服务型机器人上,并制定了一些列的产品开发战略规划,产品内容包括从提供家庭日常服务的机器人到机器人玩具。尤其是玩具机器人,因为技术起点相对低,目前已成为诸多大的生产厂家的追逐热点。 服务型机器人,如今的定义尚未统一。服务型机器人的范围很广。 为了更高地了解人们对服务型机器人的了解与期望,我们进行了问卷调查,调查结果如下:
国内扫地机器人十大排名 实力品牌详解
国内扫地机器人十大排名实力品牌详解 智能家电是市场需求下的智慧产物,它能给人们的生活带来便利,扫地机器人是其中较为典型的代表,其起源可以追溯到欧洲,由于智能家居理念进入中国较晚,扫地机器人在国内也是在近几年才开始被广泛使用,不过幸运的是如今的技术更为成熟。随着扫地机器人市场的打开,越来越多的同类产品出现在市面上,品牌种类也越来越多,很容易让人挑花眼,为了方便消费者的选择,以下是根据产品口碑和销量整理的国内市场十款较为有实力的扫地机器人品牌。 一、斐纳TOMEFON 斐纳TOMEFON源自德国,始创于1976年,致力于室内净化领域已经有40 多年的成功历史,欧洲作为智能家居的起源地,斐纳TOMEFON在该领域的品牌知名度较高,是欧洲家庭购买扫地机器人的首选品牌,常年位于销量榜首。斐纳TOMEFON旗下的扫地机器人因高颜值外表夺人眼球,高性价比虏获人心,最终以过硬的质量和极佳的清洁体验获得消费者的高度认可
二、iRobot 仅次于斐纳TOMEFON位于第二名,iRobot是美国著名的扫地机器人品牌,可有效清洁地板、地砖或地毯上的灰尘、毛发等,清扫轨迹遍布整个房间包括家具底部、墙根等平时难以触及的地方。2个虚拟墙可设置清洁区域,自动检测不同地面转换4种不同的清扫模式,有自动回归基座自动返回充电。虽是美国品牌,旗下扫地机器人还内置中文语音操作,十分方便。 三、普桑尼克 台湾品牌,依托于台湾工研院的技术,采用IPNAS无线载波导航规划系统,
先利用无线载波室内定位技术,为全屋提供0.3厘米精度定位信息,大范围精准定位,后启用HSIR+多点矩阵构图系统与双侦测科技的联合运用,实现全屋环境的地图规划。 四、科沃斯 中国知名扫地机器人品牌,新品搭载蓝鲸清洁系统2.0,采用创新恒压浮动抹布,可弹性紧贴地面,深度清除顽固污渍,可用手机智能调节水量,根据家中的地面情况选择高中低三档出水,可应对大户型的湿拖。机身底部滚刷吸口可切换,面对宠物的毛发清洁可轻松解决,并无惧灰尘。
智能清扫机器人
摘要 总体方案是设计一个自主控机器人,在一个模拟的平面结构内运动,移动机器人本体,完成自主移动、避障功能。尽快遍历每一个角落,完成任务,这个工作受多个因素的影响。其中在现实生活中清洁机器人清理的过程中,利用了机器人自身的传感系统、运动控制系统和自主蔽障系统,自动记录时间系统等。整个系统的电路结构简单,可靠性能高。实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。 采用的技术主要有: (1)通过编程来控制小车的速度; (2)传感器的有效应用; 关键词80C51单片机、光电检测器、PWM调速、电动小车、舵机 一.国内外研究现况 在日本,东日本铁路公司、shinko电器公司和Howa工业有限公司联合研制了车站地面清扫机器人. 机器人可沿墙壁从任何一个位置自动启动. 利用不断旋转的刷子将废弃物扫入白带容器中[1]日本静甲株式会社的清水工厂开发出一种自动清扫机器人. 可用于各种工厂的清扫工作. 机器人采用光纤陀螺控制方向. 采用编码器和超声波传感器测距. 采用光学探测器探测障碍物机器人的四周装有橡胶垫. 橡胶垫内部装有触觉传感器. 一旦机器人与人接触. 触觉传感器信号会使机器人停下来1以保证人的安全Br-3]这些应用还都是用于工业或者公共的场合. 真正具有里程碑意义的是2002年9月清洁机器人‘‘Roomba”美国面市. 这是一款面向家庭的机器人。重约2ky直径为 762mm(30"). 具有高度自主能力. 可以游走于房间各家具缝隙间. 灵巧地完成清扫工作. 据说这是将用于军事的“躲避地雷的移动技术,'应用到了吸尘器上。“Roomba”的动作有点迟缓. 但却能稳定安全地完成任务由于能够在完成任务后自动切断电源. 所以可以在外出期间让‘‘Roomba”在家进行清扫英国法国和澳大利亚也都推出过清洁机器人产品 在国内,对清洁机器人相关技术如机器感知、机器人导航和定位与路径规划机器人控制、电源与电源管理、动力驱动等技术的研究. 哈尔滨工业大学、华南理工大学、上海交通大学等高校,也对清洁机器人进行了大量的研究,并取得了一些成果,这些都为清洁机器人的研究开发和推广奠定了物质和技术基础 二. 设计思路 为了制作一个能够覆盖全区域的清洁机器人,首先是设计一个移动的平台。为了简便起见,设计了两轮车身,两个后轮做主动轮,主动轮用两个直流电机。从动轮用一个万向轮。清扫装置用一个伺服电机带动一个灰尘刮和一个刷子,产生推动力达到除尘的目的。在车身前部放置一个储存垃圾的箱体。在车身的最后还设计了一个抹地机械手,进一步达到清洁的目的,机械手下带有洒水除尘装置,机械手上面的水箱带有一个用伺服电机控制的门,用来控制洒水量。车身上部安
客房清扫流程及要求
客房清扫流程及要求 1、进入客房 检查客房车、客用物品及清洁用具是否齐备,并摆放整齐; (注意:清洁客房需用5块抹布;客房清洁一潮、一干两块(白色),卫生间五块:面盆一块(浅蓝色),浴盆、墙面一块,恭桶一块(黄),镜面一块,地面一块(条花))19号楼多加一块,厨房用(红色) 根据主管工作任务安排,巡视本工作区域,再根据先清扫VIP房后清扫普通房,先清扫挂“打扫”牌房后清扫走人房,先清扫空房后清扫住人房的原则安排本班清扫顺序; 1)将客房车推至清扫房门口,站在距客房门半步位置用手轻敲房门三下,等三秒后再敲一次,通报“您好,服务员”以提示客人并通报自己的身份,敲过房门后,注意客房内有无客人发问,过五秒钟后,客房内没有回答,可用房卡开门。 2)进门后如发现客人正在休息,要立即退出,如已打扰了客人,要说“对不起”,并退出关门; 3)确认房间没有客人或客人允许进房后,方能进入客房; 4)在《服务员日常工作记录表》上登记进入房间时间; 5)要求:客房门前站立姿势要端正,不允许用门卡、工具敲门,注意不要开门过猛; 6)客人在房间,客房车要求放门边,客人不在房内客房车要求全堵门; 2、开窗、门,清倒垃圾 1)进入客房后,把房门全部打开,客房车堵在客房门口; 2)打开窗帘,同时检查窗帘有无脱钩和损坏; 3)打开玻璃窗、纱窗,检查窗外是否有异物、玻璃窗是否完好,把手是否正常;(夏、冬季同时检查空调是否正常使用) 4)观察室内情况。住人房注意观察有无客人的不宜触动物品;走人房注意有无客人遗留物品;房间内设备物品有无损坏、房间设备物品有无丢失; 3、倒垃圾。 1)清理纸篓,检查是否存在有价值的东西,按环形路线收拾桌面,茶几面上的垃圾及废弃物放入纸篓(走人房要打开抽屉及柜门,检查设备有无损坏,有无客人遗留物品); 2)将烟缸内的垃圾倒入纸篓,注意不要有未熄灭的烟头,将纸篓中的垃圾倒入客房车的垃圾袋内,并更换纸篓的垃圾袋。 3)烟缸在卫生间内洗净,用布擦干、擦净。 4、撤换布件及客用品 1)撤走用过的茶杯,撤出客人用过的床单、被罩、枕袋,把撤出的床上用品放入客房车上的专用袋内并带入干净的床上用品放在围椅上。(客用布件实行一客一换,长住客三天一换或根据客人要求更换) 2)注意:在撤床时,要注意检查有无客人遗留衣物或其它物品,如发现有污迹、破损布件要单独存放。 5、作床 按照《客房作床流程》进行。 6、擦尘
城乡义务教育均衡发展状况调研报告
城乡义务教育均衡发展状况调研报告 Research Report on balanced development of urban and rural c ompulsory education 汇报人:JinTai College
城乡义务教育均衡发展状况调研报告 前言:调研报告是以研究为目的,根据社会或工作的需要,制定出切实可行的调研 计划,即将被动的适应变为有计划的、积极主动的写作实践,从明确的追求出发, 经常深入到社会第一线,不断了解新情况、新问题,有意识地探索和研究,写出有 价值的调研报告。本文档根据调研报告内容要求展开说明,具有实践指导意义,便 于学习和使用,本文档下载后内容可按需编辑修改及打印。 加快城乡义务教育均衡发展,有效盘活教育资源,实现 教育强县战略,是我县教育发展的宏观战略决策。近日结合科学发展观活动要求和调研主题,经深入全县城乡各中小学进行调查,并在认真分析我县城乡教育现状的基础上,结合我县经济社会发展规划,对我县加快城乡义务教育均衡发展提出如下思考和建议。 一、现状分析 (一)全县教育布局概况 全县幅员面积5678平方公里,辖6镇两乡,82个行政村,216个自然屯,总人口24万,其中农业人口10.7万。现有义 务教育阶段学校76所,其中独立初中10所,九年一贯制学校 3所,完全小学11所,村级学校52所。在校学生17,108人,其中初中5,933人,小学11,175人。现有教职工2135人。全
县中小学校舍总面积15.1万平方米,小学、初中生均校舍面 积分别为5.48平方米、10.7平方米。 (二)全县教育发展现状 近年来,在县委、县政府的关心支持和全县教育工作者 的共同努力下,城乡义务教育得到了明显提高。一是办学条件得到较大改善。新建校舍30所,维修、改建、扩建校舍63所、10.3万平方米。全县中小学d级危房全部消除,b、c级危房 低于10%。10所初中有8所为楼房,11所完全小学有7所为 楼房。二是农村学校布局得到适度调整。采取撤、并、扩、建,联等形势,撤并中小学校38所、村级下伸点39个,占学校总数的27.9%,全县学校总数由原来的136所减少到76所。三 是优质教育资源持续扩大。新建多媒体教室15个,新增计算 机480台,中小学生机比达到20:1。部分学校还实现了宽带 上网,教育现代化水平居全市农村上游。先后建成省一类学校 3所,市一类学校7所、市绿色学校5所、市校园文化先进学 校2所。四是教师素质不断提高。初中教师学历合格率96.8%,本科率达到24.5%,小学教师学历合格率为100%,专科率为42.5%。培养了国家级优秀教师3人,省、市级优秀教师340人;省、市级学科骨干273人,市级学科带头人36人。五是 办学质量稳中有提升。XX年,全县小学入学率为99.8%;初中
人工智能市场调研分析报告
人工智能市场调研分析报告
目录 第一节人工智能与深度学习 (3) 一、人工智能:让机器像人一样思考 (3) 二、机器学习:使人工智能真实发生 (4) 三、人工神经网络:赋予机器学习以深度 (4) 四、深度学习:剔除神经网络之误差 (5) 第二节深度学习的实现 (5) 一、突破局限的学习算法 (6) 二、骤然爆发的数据洪流 (6) 三、难以满足的硬件需求 (7) 第三节现有市场——通用芯片GPU (8) 一、GPU是什么? (8) 二、GPU和CPU的设计区别 (8) 三、GPU和CPU的性能差异 (9) 四、GPU行业的佼佼者:Nvidia (10) 五、Nvidia的市场定位:人工智能计算公司 (11) 六、Nvidia的核心产品:Pascal家族 (12) 七、Nvidia的应用布局:自动驾驶 (13) 八、Nvidia的产业优势:完善的生态系统 (14) 第四节未来市场:半定制芯片FPGA (14) 一、FPGA是什么? (14) 二、FPGA和GPU的性能差异 (15) 三、FPGA市场前景 (16) 四、FPGA现有市场 (17) 五、FPGA行业的开拓者:Intel (17) 六、Intel的产品布局 (17) 七、Intel的痛点:生态不完善 (18) 八、Intel的优势 (19) 第五节投资前景 (20)
第一节人工智能与深度学习 2016年,AlphaGo与李世石九段的围棋对决无疑掀起了全世界对人工智能领域的新一轮关注。在与李世石对战的5个月之前,AlphaGo因击败欧洲围棋冠军樊麾二段,围棋等级分上升至3168分,而当时排名世界第二的李世石是3532分。按照这个等级分数对弈,AlphaGo每盘的胜算只有约11%,而结果是3个月之后它在与李世石对战中以4比1大胜。AlphaGo的学习能力之快,让人惶恐。 一、人工智能:让机器像人一样思考 自AlphaGo之后,“人工智能”成为2016年的热词,但早在1956年,几个计算机科学家就在达特茅斯会议上首次提出了此概念。他们梦想着用当时刚刚出现的计算机来构造复杂的、拥有与人类智慧同样本质特性的机器,也就是我们今日所说的“强人工智能”。这个无所不能的机器,它有着我们所有的感知、所有的理性,甚至可以像我们一样思考。 人们在电影里也总是看到这样的机器:友好的,像星球大战中的C-3PO;邪恶的,如终结者。强人工智能目前还只存在于电影和科幻小说中,原因不难理解,我们还没法实现它们,至少目前还不行。 我们目前能实现的,一般被称为“弱人工智能”。弱人工智能是能够与人一样,甚至比人更好地执行特定任务的技术。例如,Pinterest上的图像分类,或者Facebook的
关于我区城乡统筹发展工作的调研报告
关于我区城乡统筹发展工作的调研报告 近年来,我区把统筹城乡发展作为落实科学发展观的一项重大举措,以建设社会主义新农村为契机,紧紧围绕缩小城乡差距,实现城乡一体化的目标,切实加大“三农”投入,在经济发展、基础建设、社会发展、维护稳定等方面,坚持城乡统筹,有力地推进了我区经济的协调可持续发展。到XX年底,我区实现地区生产总值32亿元,增长15.3%,人均达到19999元;财政总收入10628万元,增长21.2%,人均为662元;城镇固定资产投资14.1亿元,增长47%;城镇居民人均可支配收入15866元,增长20.2%;农民人均纯收入4736元,增长18.6%;城镇居民人均住房建筑面积33.7平方米。 我区城乡统筹发展工作在取得可喜成绩的同时,也存在一些不足。最近,结合区上实践科学发展观学习,采取实际调研和发放调查问卷的形式,深入了解我区城乡统筹发展状况和存在问题。现就调研情况,谈谈自己的观点。 一、我区统筹城乡发展的现状 (一)统筹城乡经济发展,缩小城乡居民收入差距。 1、推进现代农业发展,促进产业结构调整。
今年以来,按照“现代农业看杨凌”的目标规划,区政府把发展现代农业确定为我区产业发展重点,启动了以“五个万”为重点的现代农业示范园区建设工程。先后分四次组织干部群众800多人赴山东寿光等地学习现代农业发展先进经验,制定实施了《杨陵区促进标准化生产园设施农业发展(试行)办法》《杨陵无公害农产品实施方案》,推动无公害蔬菜基地建设和无公害产品认证。 抽调21名单位领导,处级领导任工作组组长,组成设施农业和小麦良种、20万头生猪基地、万头奶肉牛基地和万亩苗木花卉基地建设等五个包抓组,督促和推进“五个万”建设工程。截止目前,设施农业大棚完成2274座墙体建设,中棚246亩。苗木花卉基地引进企业3家,高酸苹果项目完成投资150万元,栽植树苗12万株,中华红叶杨项目栽植树苗1.3万株,育苗10万株。20万头生猪基地已完成水电路等配套设施,正在进行一期200亩猪舍建设。万头奶肉牛养殖基地完成了围墙圈砌和道路、高压线路等规划。 今年设施农业2550座大棚的建设,单就此项给农民转移性投入达到5000多万元。随着设施农业、生猪、奶肉牛基地和苗木花卉基地的建成,涉农企业的介入带动,使我区农民收入将在今后一段时期有稳定、可持续增长的保证。初步测算,农业园区的全面建成,使农民从事此项生产人均收入达到XX元左右。
关于智能清洁机器人的商业价值
关于智能清洁机器人的商业价值 一、智能家居系统的发展前景 在许多人的概念里,智能家居系统这个词离我们的生活似乎异常遥远,只是存在于高科技展览会里的表演,或是富豪们向人们炫耀财富而展示的一种家居装饰,可是他们没有意识到的是,在我们生活的周围存在着很多智能家居的影子。所谓的智能家居系统一般包括安防、电话、影音、空调、灯光等等各个方面,一整套完整的智能家居系统可以满足自己居家的各种需求。随着科学技术的不断进步、人民生活水平的不断提高、人们生活质量也越来越好,人们追求高品质住房的要求也不断提高,而家居智能化概念的普及,智能化装修的观念必将深入人心,事实上,近年来智能家居系统已开始一步一步走进越来越多的普通家庭。家居智能化装修的选择必将是大势所趋。可以说,也许就在不远的将来,家居智能化必然是生活中一个最基本的要求,如果您家没有进行智能化装修,那将是一件让人感觉不可思议的事情。智能家居有未来,而且一定会很好的服务中国人民。消费者在享受智能化的时尚生活的同时也给他们带来简单、方便、快捷。 也许有的人不一定相信未来的家庭装修将是智能化的天下,但是从不同角度分析之后,这种怀疑将不复存在。一、从发展趋势上来说:根据十一五规划纲要的要求,国家着重强调了住宅建设要做好节能减排、绿色建筑、智能建筑的要求,中央也不断加大了财政与政策支持,提出了“到2010中国大中城市60%的住宅要实现智能化”这一发展目标。因此,住宅智能化必然会是未来住宅建设发展的趋势,而住宅的智能化即意味着家庭的智能化。同时,之前已经提到过,现代社会在不断地发展着,与此同时人们的生活水平与生活质量也在不断的提高,可是随着社会的发展,普通的家庭装修已经无法满足人们的日益增长的对于生活水平提高的要求,人们追求高品质住房的要求不断的提高,而家居智能化概念的普及,智能化装修的观念正好迎合了人们的需求,所以说,家庭装修的智能化必将深入人心,也必将是众望所归的。到那时,家居智能化必然是生活中一个最基本的要求,如果您家没有进行智能化装修,那么就好像现在您家没有安装宽带一样,让人无法接受。智能家居有美好未来,这将是毋庸置疑的。 二、以人为本:智能家居系统的产品与家庭的日常生活息息相关,功能单一化、操作复杂化的产品不是智能家居的最终归途,智能家居系统的产品未来的趋
智能清洁机器人
智能清洁机器人设计 引言:本学期我选修了《机器人概论》这一门选修课,听了老师对多种机器人多方面的介绍,我基本上对智能机器人有了一个大概的了解,同时也萌发了自己设计多用途的智能机器人的兴趣。于是,在老师的讲解下,以及自己对生活的一些感悟设计了一款适用于百姓家庭的清洁机器人,以下是我对这款智能机器人的介绍。 Introduction:this semester I took "robot introduction the optional course, listening to the teacher to a variety of robot various introduction, I basically to intelligent robot a general understanding, also had their design utility of intelligent robot interest. And so, in the sense of the teacher, and some of the design life feeling a applicable to the people of the family clean robot, the following is I to this type of intelligent robot in the paper. 关键词:智能化,清洁,机器人 前言:人们常常会问为什么要发展机器人?要发展怎样的机器人?那些机器人适合我们人类生活?其实,机器人分很多种:有军用机器人、生活机器人、医用机器人、农业机器人、微操作机器人等等,毫无疑问它们都是智能化的机器人,它们的出现就是要满足人们各方面的需求,给人们带来便利。最早的机器人出现在1959年,就是说机器人的历史并不算长,但它的发展速度确是飞快的人们都热衷于生产出各式各样适合人们使用的机器人,从以前的机械化到现在的智能化,机器人已发生了很大的变化。在现在的二十一世纪里,人们对生活质量以及对工作的要求促使着智能机器人的发展,机器人可以替人们干那些人干不了、干不好的工作。生活中有些工作会对人体造成伤害,比如喷漆、重物搬运等;有些工作要求质量很高,人难以长时间胜任,比如汽车焊接、精密装配等;有些工作人无法身临其境,比如火山探险、深海探密、空间探索等;有些工作不适合人去干,比如一些恶劣的环境、一些枯燥单调的重复性劳作等;这些都是机器人大显身手的地方。服务机器人还可以为您治病保健、保洁保安;水下机器人可以帮助打捞沉船、铺设电缆;工程机器人可以上山入地、开洞筑路;农业机器人可以耕耘播种、施肥除虫;军用机器人可以冲锋陷阵、排雷排弹…… 所以说,机器人已经成为现代生活工作不可缺少的一部分,与人们的生活密切相关。灵感来自平常生活,人们都不大热衷与做家务,有些人觉得烦,有些人则没时间做,与其这样子,为什么不设计生产出可以做家务、搞清洁的智能机器人呢?智能清洁机器人可以帮你清洁你的家居,帮你完成各种烦心的清洁任务,给人们一个干净、清洁、舒适的家。 正文:
酒店客房清扫标准流程以及注意事项
酒店客房清扫标准、流程以及注意事项 客房的清洁程度是客人入住酒店最关心的问题之一,同时也是客人选择酒店的标准之一。清洁卫生工作是客房部的一项重要任务。具体内容包括:清洁整理客房、更换和补充各种用品、检查和保养设备设施等。 一、客房清洁整理前的准备工作: 1、听取工作安排,领取工作房卡、对讲机。 按酒店要求着装,听取工作安排,领取工作日报表,了解当日房态情况,根据前台开房的轻重缓急、客人情况和领导特别交代,决定当天客房清扫顺序。 2、准备客房工作车及清洁工具: 工作车是客房服务员清扫整理房间的重要工具,工作车的准备工作应该在每天下班前做好,第二天进房前再检查一次。操作步骤如下: ①将清洁车靠门放置,离墙10公分。 ②清洁工作车。用微湿抹布将工作车里外擦拭干净,并检查工作车有无损坏。 ③挂好垃圾袋,放置干净布草,将客房用品摆放在工作车中。 ④准备清洁桶、清洁工具和干净抹布(三湿一干)。 抹布:干1(绿):抹卧室浮尘 湿1(红):房间家具、面盆、卧室不锈钢边 湿2(黄):卫生间地面、墙面,卧室走廊地面 湿3(绿):马桶 ⑤将吸尘器靠墙,紧挨工作车。 工作车物品摆放示意图: 供参考. 第二层: 床单、被套 第三层: 毛巾、浴巾、地巾 第四层: 消毒箱、一次性拖鞋 清洁箱:
二、客房清理流程:开门:1、 ①站在房门的正中,距离房门一步位置敲门,报上身份。征得客人同意后, 进入房间。进入房间时,无论显示有没有住客,都必须先轻敲门三下,报客房服务后,得到回复后方可进入,若无人回应,则再次轻敲三下报客房服务,确认无人后方可进入。②进门程序:先用食指敲门三次,每次三下,中间间隔三秒。并说“您好,度,报“您好,我是客房服务我是客房服务员”用房卡开门,将房门推开至30 员”确认是有有防盗链,确认无客人方可进入。开启房门后如发现客人在不能用力过度,避免碰撞到客人。③开启房门时,睡觉,当客人醒来时,应礼貌跟客人道歉,并说明来意,征求客人意见。如客人没被吵醒,应立即轻轻关上房门退出房间,避免打扰客人休息。、清洁房间:2①将工作车横放在客房门口,位置正好挡住房门为宜。 ②拉开窗帘,打开窗户,关闭空调。将电视调至中央一台,音量适量,关闭 电视。将拖鞋放入消毒桶内消毒。③撤布草,将撤下的布草放入布草车工作袋内,同等数量的干净布草放在一 边待用。房OK ④整理器皿、烧水器、小商品。如客人在房内用过餐,则将餐具收起。供参考. 后,送至餐厅。将用过的杯具放进卫生间备洗。 ⑤将烟灰缸内的杂物,倒到垃圾桶内。放进卫生间备洗。清理烟缸时,要留意火柴、烟头有无熄灭(不可倒入马桶) ⑥收拾垃圾。将垃圾桶内的垃圾连同桌面、地面以及其他地方的垃圾一同放到工作车的垃圾袋内。同时将垃圾桶内外擦拭干净,换上干净垃圾袋,放回原位。 ⑦按要求做床。 ⑧检查设备设施是否正常使用。设备设施主要有:电灯、电视、电话、空调、遥控器、喷淋头、水龙头等。 ⑨房间抹尘。 3、清理卫生间: ①进入卫生间前,打开灯和换气扇。将清洁工具放到卫生间门口。 ②撤出垃圾,撤走用过的布草,;垃圾桶换上干净垃圾袋。 ③清洗卫生间玻璃、面盆、地面、门把手。检查马桶盖是否好用,马桶出水口冲水是否正常。冲净马桶,将马桶内外及马桶盖后侧清洗干净并用抹布擦干。 ④将烟灰缸、杯具、皂碟等清洗后放回原位。 ⑤按酒店标准补充客用低值易耗品和其他客用物品。 ⑥用备好的抹布,按顺序对卫生间进行抹尘。将消完毒的拖鞋放好。 ⑦将卫生间地面清洁干净。 ⑧检查有无遗漏之处,拿出清洁工具,关掉灯和换气扇。 4、按照要求的顺序对房间进行抹尘和检查,做到不遗漏不重复。同时查看房间内需补充的客用物品是否补齐,有无客人遗落物品。 5、吸尘:由里到外,特别注意房间的死角、窗帘后、床侧等处,要将吸尘头拔下,直接用管子吸。吸完后将电器关闭。将过道地面擦拭干净。拔出房卡,退出房间。
新农村城乡一体化建设发展调研报告
新农村城乡一体化建设发展调研报告 内容提要: 本文是在对xx乡xx村新农村建设与城乡一体化发展基本情况进行充分调研的基础上,通过一个我们常用的“swot”分析法,对xx村基本情况进行了系统的、逻辑的分析与梳理,最后提出了一些新农村建设及城乡一体化发展的思路与建议。 在党中央提出新农村建设及城乡一体化发展战略规划的大背景下,xx村作为xx乡最大的一个村,是乡域经济发展的排头兵。如何抓住机遇快速发展、赢得先机,是xx村“两委”班子应该考虑的首要问题。我们在充分调研的基础上,形成了这篇调研报告。 一、xx村基本情况 1、人口状况 xx村共有10个社,642户,2517口人。 2、产业状况 (1)种植业:主要以大麦、小麦为主; (2)养殖业:主要以牛、羊为主; (3)劳务产业:主要在建筑、运输、服务等行业,务工地主要在金川、河西堡、xx; (4)其他产业:有一家砖厂,一家沙料厂,一家面粉厂。 3、社会状况
(1)社会基本状况:约有80%的人口外出务工,村里留下的多为老人、儿童; (2)村民收入状况:xx年人均收入约5000元左右,其中:70%为务工收入,30%为种植、养殖收入; (3)党组织状况:设有:1个党支部,下设6个党小组。共有59名党员,其中:男56名,女3名。 4、资源状况 (1)耕地资源 共有耕地面积为6635亩,人均拥有耕地面积约为2.6亩。耕地质量较好。 (2)劳动力资源 以16岁至55岁为正常劳动力,占总人口的75%计算,再考虑一些特殊因素,约有1800余人的农业富余劳动力。这些农业富余劳动力中掌握一定技术的以10%计算,就约有200人的技术型劳动力。 二、xx村“swot”分析 在了解了xx村基本状况的情况下,我们需要做一个简单的“swot”分析,将这些基本状况系统化、逻辑化,为我们思考xx 村的发展提供系统的依据。 1、s(优势) (1)交通便利。距离县城约30分钟的车程,且在各社都通有乡村公路。各社村民居住地、耕地都比较集中。
居室清洁标准及流程
居室清洁标准及流程 1 保洁员要做到工作积极主动、认真负责,做到眼勤、手勤、脚勤。 2 每日7:30—11:00打扫长辈房间,要做到地面干净,家具无灰尘,保证无死角、无异味问题。 3 居室清洁标准一般原则 3.1 从上到下。如抹尘时应从上至下进行。 3.2 从里到外。擦拭地面时,应从里向外清扫。 3.3 环形清理。在清洁房间时,应按顺时针或逆时针方向进行环形清扫,以求时效及避免遗漏。 3.4 干湿分开。在擦拭不同的家具物品时,要注意分别使用干、湿抹布。如清洁灯具、电器时要使用干布。 3.5 先卧室后卫生间。 4 居室清洁的操作流程 4.1 准备工作 4.1.1 检查工作车上清洁用品及工具是否齐全。 4.1.2 清扫工具放置在工作车上。 4.2 敲门进入房间,将工作车靠门外一侧墙放置,防止因房间内空间狭窄造成的堵塞。4.3 将长辈房间窗帘全部打开,并且酌情开窗通风。 4.4 将长辈房间垃圾桶内的垃圾清理干净,确保干净无污迹。 4.5 擦尘 4.5.1 按顺序使用规定的抹布从上到下环形擦拭。 4.5.2 用干布擦拭各类电器,擦拭灯具。 4.5.3 检查、擦拭墙面污渍。 4.6 清洁地面 4.6.1 从里往外清洁地板垃圾 4.6.2 干净,无污渍,无毛发 4.7 环视房间整体 4.7.1 检查房间全部打扫整洁 4.7.2 物品摆放齐全和标准
4.7.3 无遗留物品 4.8 离开房间,将清洁用品放回车内 5 卫生间清洁流程 5.1 将清洁篮拿进卫生间,撤走垃圾,将马桶冲一下水,将洁厕剂沿马桶边缘底部喷2次,浸泡5分钟。 5.2 台面清洁 5.2.1 首先带上胶皮手套。先将房间抹尘用的抹布、地拖布洗净拧干,放到房间抹尘用,再将抹浴地用的抹布洗净拧干,放到旁边备用。 5.2.2 用全能清洁剂喷壶对准面盆,喷洒2次,然后用海绵擦拭水龙头,再从面盆中心位置向外顺时针环形擦拭面盆至边缘,再从边缘向中心位置逆时针环形擦拭至面盆中心。 5.2.3 用清水洗过洗面盆及水龙头的全能清洁剂残留,然后用干抹布擦干。 5.2.4 用干净的抹布擦拭一下镜面,然后用干抹布擦拭镜面,从镜面左上方向下擦拭镜面,执行向下,行行接替,擦至镜面右下方,在擦拭过程中,需要我们眼睛跟随抹布一起行走,不遗漏镜面任何位置。 5.3 马桶清洁 5.3.1 用马桶刷从马桶下水口最里向外圈顺时针转擦洗至马桶外圈,顺便清洗马桶座圈,座圈后部。 5.3.2 放水冲去洁厕剂残留,用马桶抹布擦拭马桶水箱,擦马桶水箱盖时,需把卫生袋拿起擦拭,擦完水箱再擦拭整个水箱,擦完水箱后先擦拭马桶盖,正反两面擦拭干净,接着擦拭马桶座板,也是正反两面擦拭干净,注意擦拭盖板后部螺丝处,接着擦拭马桶下部,一直擦拭到马桶底部。 5.4 擦卫生间地板:用拖把从卫生间地板最里面向外擦拭地板,擦拭地板要求顶板擦拭,有垃圾的话,边擦拭边把垃圾向卫生间门口方向赶出,擦拭过程中,需翻动抹布擦拭,保证擦拭过得地板,无污渍、无垃圾、无毛发。 6 铺床 床铺随起随叠,保持整洁美观。 7 检查 清洁完房间后,需环视居室的每个角落,保证所有清洁工作已到位。
小城镇建设调研报告
小城镇建设调研报告 加快小城镇建设,是推进城镇化进程,带动农村经济和社会发展的重要战略措施。今年以来,本人就**镇小城镇建设情况进行了深入调研,现将情况汇报如下: 一、基本情况 **镇位于县城西南部,镇政府驻地距县城18公里,是山东省政府首批命名的中心镇。人口5.1万人,面积92平方公里,耕地4200公顷,小城镇建设区面积为3.6平方公里。辖2个居委会,23个村委会,共25个行政村。 近年来,**镇结合本地实际、科学规划、高标准建设,以工业化的理念来经营小城镇,努力推进小城镇建设,提高小城镇品位,塑造小城镇特色,加快了构筑农村新型城镇体系步伐。主要表现在四个方面: (一)注重编制规划,促进了小城镇建设健康有序发展。**镇以工业强镇为基础,大力加快小城镇建设,镇政府于2000年聘请山东省城镇规划设计院的专家对**的村镇体系、城镇镇区、基础设施进行高标准、高起点规划。小城镇建设区面积为3.6平方公里,工业经济园区占地2000亩。2000年9月份又聘请临沂市规划设计院对镇驻地作出详细规划,做到近期建设与远期目标协调一致,同时对沿街建筑物进行单体设计,规划面积15万平方米,规划覆盖率达到35%。2006
年,又聘请市规划专家对工业区进行详细规划,总规划面积94.2公顷,在规划中利用道路将园区划分为6个板块。镇居住区详细规划由县村镇规划设计室设计完成,总规划面积为5.8平方公里,详细规划覆盖率为85%。 (二)加大投入,全面推进小城镇建设进程。一是基础设施建设,镇驻地规划有二纵三横六条道路,均已全部硬化,有沿街楼2700间,今年新建商住楼1栋,沿街楼19座。二是“绿化、美化、亮化”工程。近年来,先后投资350万元对小城镇环境进行综合整治,全镇共安装路灯200盏,绿化面积16000平方米。其中今年栽植绿化苗木500余株,投资80万元对广场花园及周围道路两侧进行绿化,为镇村居民提供了良好的生活环境。 (三)强化管理,营造了小城镇发展的良好环境。在制定优惠政策的同时,小城镇的管理得到进一步加强,主要呈现三个特点:一是完善了管理制度。分别制定了小城镇规划建设管理办法、环境卫生管理办法等规范性文件,使小城镇管理初步纳入规范化轨道;二是加强了建设管理。本着合理布局,有序开发的原则,严格建设程序,从批地到设计、建筑实行“一条龙”管理,高起点、高标准建设小城镇。三是加强了环境治理。以镇村环境综合整治为总抓手,加快建设规范有序、卫生整洁、优美和谐的镇村环境,推进城镇建设步伐。先后投资180余万元,上了叉车、垃圾运输车,设置了288
智能清洁机器人国内外发展状况浅析
146 研究与探索Research and Exploration ·探讨与创新 中国设备工程 2018.02 (下) 智能清洁机器人集机械学、电子技术、传感器技术、计算机技术、控制技术、人工智能等诸多科技为一体,不仅是一种环保、智能型的服务机器人,还具有良好的应用前景和广泛的市场需求,近年来智能清洁机器人的发展和应用受到国内外的广泛重视,其技术越来越成熟,应用也越来越广泛。 1?国内外发展情况 1.1?国内相关研究情况 黑龙江八一农垦大学尧李慧、田雷与黑龙江省农业机械工程科学研究院蔡晓华、侯云涛对牛舍清洁机器人的结构与避障设计进行分析与研究,并结合迂回式路径规划算法和靠墙或牛栏等障碍物的避障策略,实现清洁机器人对牛舍的全方位清扫工作。 中国计量大学的郑哲恩、孙坚、沈斌,利用工业相机拍摄粉尘,经过MALTAB 处理之后对粉尘面积进行计算,并利用清洁机器人进行清洁,根据清洁效率计算得出清洁机器人的清洁性能。 解放军理工大学国防工程学院茅靳丰、朱国栋、张虎、宋威,根据风管机器人视觉检测系统的组成,包括照明系统、摄像头、图像采集卡、图像采集软件以及图像分析软件,利用Matlab 的图像处理功能对采集到的风管内部图像进行预处理,并依据特定的算法对其清洁度进行评估。 东南大学的陆晓敏,吴浩真,韩可炯,秦家晨设计了一种基于MSP430f149 的智能清洁机器人系统。机器人依靠车体的风机装置吸附在玻璃上,可以自动完成路径规划、探测窗户的边角距离、自动清洁窗户。实现使用设计的机器人来代替人进行高空作业,在高层建筑中对外壁玻璃上的粉尘和其他污物进行清洁。 东北林业大学的王振秋、薛建琪、张宇崴、狄海廷针对变直径杆件,设计一种爬杆清洁机器人。模拟人的上肢和下肢,轮流夹紧杆体,在曲柄连杆机构的驱动下,实现机器人的攀爬运动,在机器人攀爬过程中实现 自动清洁。 广东技术师范学院天河学院的陈朝大和广州航海学院的吕志胜针对红外避障检测和绝对定位的局限性,对智能寻迹的清洁机器人进行研究。机器人采用超声波传感器配合伺服电机构成自动避障系统,对室内未知环境进行探测,提出了多路径融合规划控制算法,使机器人能够完成自主全区域覆盖行走。 由此可见,国内智能清洁机器人研究主要集中在对障碍物的躲避以及特殊区域的清洁方面,研究应用范围主要包括高空清洁、管道清洁、牛舍清洁等,对更为复杂环境的清洁能力检测方面研究较少,利用静态图像进行分析和评估以及终端特殊机械机构的设计是目前主要的技术研究方向。1.2?国外相关研究情况 由新加坡国际和南洋理工大学控制专家Elid 开发的机器人技术系统Outobot,展示了一个能够清洁和油漆高层建筑外部的机器人,声称提供一个更安全和更有效的替代人工清洁的方法,清洁水平达到了一个新的标准。 韩国的Jin-Ho Suh 等人发明了一种更为高效的水下清洗机器人研制平台,平台可用于研制和设计可满足应用在工业清洁工作领域中的水下清洗机器人性能,所开发水下清洁机器人的方法,可用于实现清洗不同类型的工业水箱的功能。 英国的Jo ?ao Mouraa B 等人提出了一种驾驶室前清扫机器人的控制和路径规划方法。所提出的解决方案包括研究机器人之间的相互作用机械手联合清洁一个未知的表面,并在制定操作空间的实施的同时,通过力和位置控制末端执行器的轨迹,从一个光栅实时的扫描到被清洁表面与局部的自适应路径表面几何的细微差别。 英国的Tetsuo Tomiyama 等人介绍了列车驾驶室前部清扫机器人的系统和概念设计方法。对现行程序进行分析,发现过程中可能出现的空白,并产生一个满足这些要求的清洁系统概念设计的要求清单。提出的解决方案包括系统在不同子系统中的划分,每个子系统的不 智能清洁机器人国内外发展状况浅析 褥铜,赵晨 (顺德出入境检验检疫局技术中心,广东?佛山?528303) 摘要:通过分析智能清洁机器人的国内外发展状况,为相关企业做技术研发方向提供服务,对于提高我国智能清洁机器人生产企业的技术水平,以及提升我国在国际智能清洁机器人市场的竞争力有着积极的意义。 关键词:智能清洁机器人;国内;国外;发展状况 中图分类号:F416 文献标识码:A 文章编号:1671-0711(2018)02(下)-0146-02
智能清洁机器人的商业价值
智能清洁机器人的商业价值 一、智能吸尘机器人占据未来市场的可能性 作为清洁设备的一个做组成部分,智能吸尘机器人同样有着广阔的发展前景,随着人们日益提高的生活水平,人们对于享受生活的要求也就越来越高。家庭清洁-一项家庭日常必需做得工作,费时费力,很多人都希望可以简单而又轻松的完成这一项工作。故而,智能吸尘机器人有了其存在的市场价值。并且随着越来越多的人需要它,它的存在价值以及发展潜力也就越来越大了。 相比于普通的吸尘器,智能清洁机器人与其相比存在着很大的不同。智能吸尘机器人存在内置智能芯片,可以自动识别判断家庭环境,通过算法来计算行走路径,通过物理或者光学感应来检测家中灰尘的位置并能够自动清扫地板上的灰尘,清理毛发和碎物,并且在清扫任务完成后,智能吸尘机器人可以自动返回充电。而使得智能吸尘机器人可以做到这样的原因就是智能吸尘机器人内置的智能芯片以及提前下载拷贝到芯片中的程序。 在组成部分上,智能吸尘机器人与传统的吸尘器有着很大的不同:1、传感部分:相当于人的五官,起到对外界的感知作用。2、控制部分:相当于人的大脑,起到连接对肢体的支配。3、驱动部分:相当于人的肢体,被控制起到协调作业。4、吸尘部分:在智能吸尘器里面嵌入真空吸尘器部分。5、电源部分:提供机器所需要的动力系统。可以说,除了吸尘部分与传统的吸尘器有共同点之外,用户无法从智能吸尘机器人上找到一丁点吸尘器的影子,而这些正是在未来智能吸尘机器人可以取代吸尘器的原因。 在功能方面,智能吸尘机器人更加适合未来用户关于家庭清洁方面的要求,比如:1、智能清扫:仅仅只需要按下启动,无需人工辅助,智能吸尘机器人便可自动进行吸尘工作遥控清扫,用户可以通过红外线遥控感应器,随时遥控,随时清扫。2、超薄机身:可以直接切入家具底部进行清扫。在不工作时,可以放在任何地方,不占用太大的空间。3、自主导航:由于智能吸尘机器人的内置智能芯片以及算法的缘故,智能吸尘机器人可以采用不同的
客房清洁卫生程序及标准
1、清洁房间流程(含续房清洁流程) A、房间清洁流程与物品摆放规范; 整理房间操作规程 1、工作车停靠在房门侧。 2、按《进房程序》进房。 3、掀开窗帘并检查是否完好,开窗。 4、关空调,关灯,关电视。 5、收集房内垃圾,倒入工作车垃圾袋内,垃圾桶放在适当位置。 6、收集房内用过的茶杯、钢化杯、烟缸、放置卫生间。 7、撤床:将棉被、枕头整好,放在适当位置,将脏布草撤出放到工作车布草袋内。 8、一次性带干净床单、枕套。 9、拖床:将床抽出,检查床垫并整平,检查钉脚、橡胶轮。 10、整理垫被,确认无污、无损、然后平整、四角四边对齐。 11、铺床单,正面朝上,中线位于床正中,将四角包紧,角成90度,并整好床裙。 12、将床推置于床头板正中。 13、抹尘:从上到下,从里到外按顺(逆)时针方向进行房间全面抹尘,边抹边检查设备有无 损坏。 房门(查门,请勿打扰牌) 衣架 行李柜、梳装镜、写字台、文件夹、抽屉、梳装椅(查有无坏损) 电视机(查开关、摇控器) 垃圾桶内外、窗台、窗框、沙发扶手、茶几、落地灯、床靠板、床头灯、床头柜、电话、空调、电视、壁画、地角线。 添补物品:将客房内欠缺的用品一次从工作车上取出,按客房用品摆放标准将用品摆到各自位置上。 B、撤、铺床流程与规范; 一、流程: 1、将床垫放平,并留意床垫角落所做标记是否符合本季度标记,按规定翻转床垫。 2、床护垫褥是否清洁、平整,四角松紧带是否套牢于床垫四角。 3、站在床头甩单,将折叠的床单正面朝上,稍微拉开将一头抛至床尾,两手分开,用拇指和食、 中指捏牢床单,其余二指托住,将床单向上提起,然后成弧状向下压,待其降落时,利用空气浮力调整好位置,使床单中折线居中,四边下垂长度均等。 4、用直角手法包紧床头、床尾四角,将床单折压至床垫下面,床单表面要平整。