远程交通微波雷达检测器(RTMS)的深度解析知识讲解
远程交通微波雷达检测器(R T M S)的深度解
析
远程交通微波雷达检测器(RTMS)的深度解析
一、概述
1.1什么是RTMS
RTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。
1.2RTMS的应用领域
RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。
1.3RTMS的发展历程
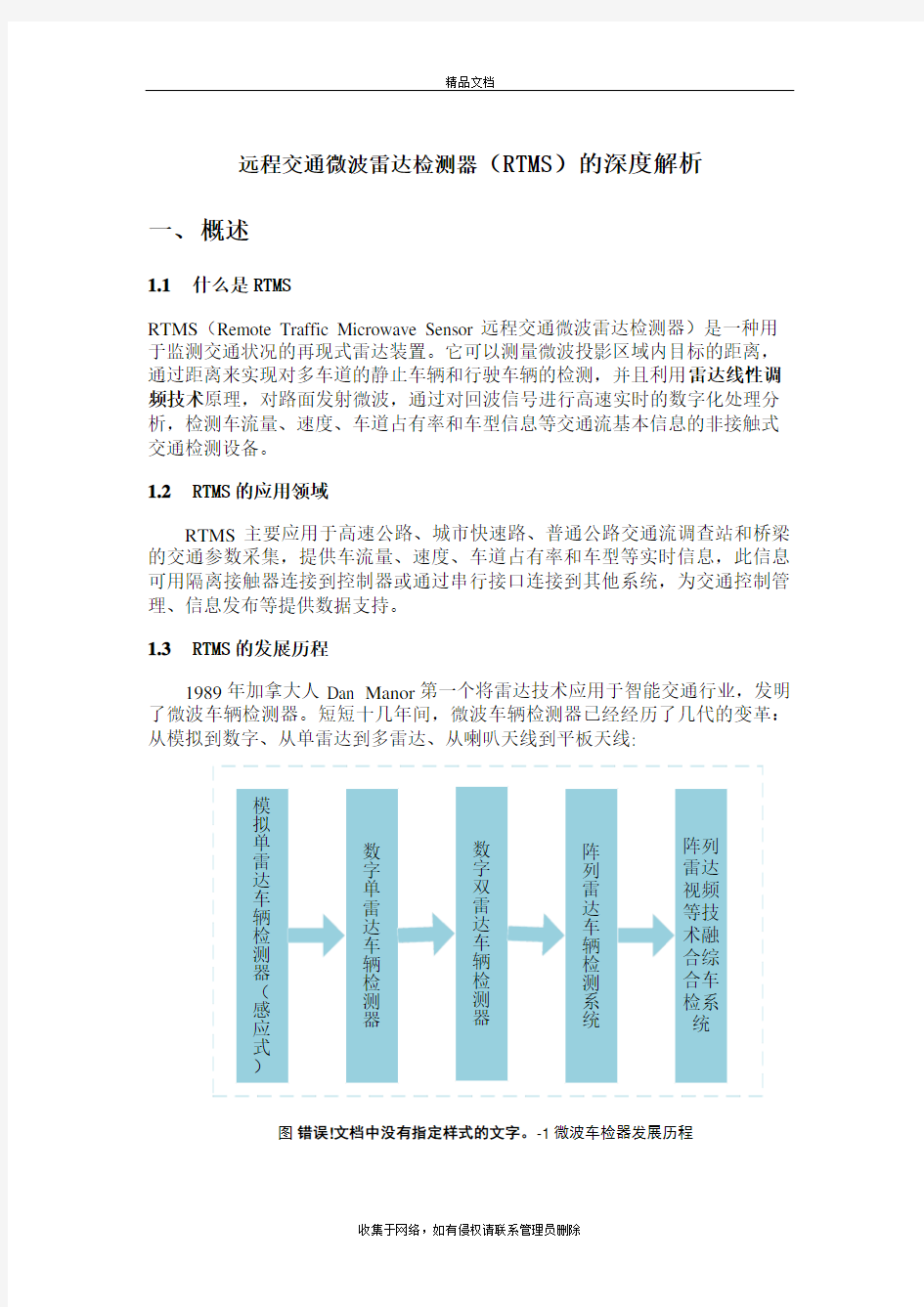
1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:
图错误!文档中没有指定样式的文字。-1微波车检器发展历程
我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:
数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快;
数字阵列雷达分辨率极高,能取得目标精确位置;
数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;
数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
二、R TMS的工作原理
2.1雷达线性调频技术
线性调频信号可以获得较大的压缩比,有着良好的距离分辨率和径向速度分辨率,所以线性调频信号作为雷达系统中一种常用的脉冲压缩信号,已经广泛应用于高分辨率雷达领域。直接数字频率合成(Digital DirectFrequency Synthesis,DDS)技术是解决这一问题的最好办法。在雷达系统中采用DDS技术可以灵活地产生不同载波频率、不同脉冲宽度以及不同脉冲重复频率等参数构成的信号,为雷达系统的设计者提供了全新的思路。
2.2雷达技术
“雷达”是英文radar的音译,为Radio Detection And Ranging的缩写,意
思是一种无线电检测和测距的电子
设备,其原理是雷达设备的发射机
通过天线把电磁波能量射向空间某
一方向,处在此方向上的物体反射
碰到的电磁波;雷达天线接收此反
射波,送至接收设备进行处理,提
取有关该物体的某些信息(目标物
体至雷达的距离,距离变化率或径
向速度、方位、高度等)。
测量距离实际是测量发射脉冲
与回波脉冲之间的时间差,
因电磁波以光速传播,据此就能换算成目标的精确距离。
●测量目标方位是利用天线的尖锐方位波束测量。测量仰角靠窄的仰角波束测量。根
据仰角和距离就能计算出目标高度。
●测量速度是雷达根据自身和目标之间有相对运动产生的频率多普勒效应原理。雷达
接收到的目标回波频率与雷达发射频率不同,两者的差值称为多普勒频率。从多
普勒频率中可提取的主要信息之一是雷达与目标之间的距离变化率。当目标与干
扰杂波同时存在于雷达的同一空间分辨单元内时,雷达利用它们之间多普勒频率
的不同能从干扰杂波中检测和跟踪目标。
从工作方式上来讲,RTMS微波车检器属于FM-CW Radar(调频连续波雷达),即通过对连续波进行频率调制来获得距离与速度信息的雷达体制,其特点是具有高距离分辨率、低发射功率、高接收灵敏度、结构简单等优点,不存在距离盲区,具有比脉冲雷达更好的反隐身、抗背景杂波及抗干扰能力的特点,且特别适用于近距离应用。
从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达:
●数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快;
●数字阵列雷达分辨率极高,能取得目标精确位置;
●数字阵列雷达能在恶劣的天气气候条件下正常追踪目标;
数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。
RTMS借鉴了高科技阵列雷达科技的精髓,创新性地将阵列天线技术应用于微波车辆检测器中,研发出了RTMS第四代产品-G4阵列雷达微波车辆检测器。G4采用8×8阵列天线,64个阵列天线轮询工作,每个天线均可完成微波信号发射与接收功能。
RTMS G4阵列天线
“双雷达”的天
线
2.3 微波技术
微波是指频率为300MHz-300GHz 的电磁波,换算成波长则是在1米(不含1米)到1毫米之间的电磁波,是无线电波中一个有限频带的简称。微波频率比一般的无线电波频率高,但低于可见光,通常也称为“超高频电磁波”。RTMS 的X3的发射波中心频率在10.525GHz ,G4的发射波中心频率在
24.125GHz ,都处于微波频段,因此被称为微波车检器。类似的设备还有声波车检器、超声波车检器,分别工作在声波(20Hz 至20000Hz )频段和超声波(大于20000Hz )频段。
电磁波谱图
微波作为一种电磁波也具有波粒二象性。微波的基本性质通常呈现为穿透、反射、吸收三个特性:对于玻璃、塑料和瓷器等非金属物体,微波几乎是穿越而不被吸收;对于水和食物等就会吸收微波而使自身发热(例如微波炉的应用);而对车辆外壳等金属类东西,则会反射微波。
接收天线
发射天线
发射/接收天
线
衍射
另外,所有波的另一特性是“衍射”,也叫绕射,即波遇到障碍物或小孔后通过散射继续传播的现象,一般来说,孔隙越小,波长越大,这种现象就越显著。微波车检器的波长一般在1cm-2cm,由于货车的体积一般比较大,当微波的波束在经过货车边沿时,同样会产生衍射现象,如下图。凭借高灵敏度接收天线,RTMS能够接收到二次衍射之后的被遮挡车辆的反射波,因此,RTMS微波车检器安装在路侧做交通数据采集时,能够解决一部分的大车遮挡问题,这是RTMS微波车检器的独特优势。
EIS
EIS
EIS
大车遮挡情况下检测
正是基于微波的上述特性,RTMS能够可靠的探测到检测区域内的金属物体存在,而不受大型车辆、非金属物体、行人的干扰。
2.4微波覆盖区域
微波雷达检测器的覆盖区域是一个椭圆形的微波投影区,最大检测范围为:(以G4为参考)
仰角投影宽度50 度
方位角投影宽度 12 度
范围 0 至 76米
2.5 微波探测能力
最大可检测的车道数目不少于12个。车道的宽度可以由用户以200毫米的步进进行调整。
车道宽度:2-7米
探测时间:用闭路连接器时,时间间隔10毫秒。持续时间可编程控制在30毫秒到3秒之间。 采样周期:以10秒为间隔,最大可达600秒。
2.6 微波检测原理
RTMS 接收到微波投影区域内各种表面的连续不断的回波, 如人行道, 栅栏, 车辆以及树木等。在每一个微波层面内的固定物体回波信号将形成背景阈值, 如果回波信号的强度高于该微波层面的背景阈值,则表明有车辆存在。
微波区域内的回波信号
在RTMS 设置时,“背景获取”可在30秒内完成。在正常使用时也会经常调节。例如,来自停止车辆的回波信号在30分钟内成为背景,检测将被终止,车道对应的输出开关将被释放。相反的, 当车辆离开时,背景阈值会很快降至初始状态,新的背景阈值在30秒内形成。
最强的回波信号来自车辆的垂直表面的反射,水平表面(如车顶)将散射微波,回波信号较弱。接收到的回波信号的强弱取决于车辆的反射面,实际接收信号是多重反射信号的总和。有时来自各处的信号可能不是同一相位而导致信号会低于阈值,此时短暂的低电平信号称为零信号。为避免由零信号产生的误判,RTMS 对信号处理时引入一个参数—“扩展延迟时间(EDT)”, 持续时间短于EDT 的零信号将被忽略。
阈值和EDT 是两个参数, 当操作模式选定后其默认值也就设置了。通过参数设置可以优化检测器的运行。 2.7 RTMS 的工作流程
上文介绍了RTMS 微波车检器的基本情况,接下来我们再说说RTMS 是如何工作的。
回波信号
阀值 车辆
护栏
车辆
车辆
2.7.1微波波束、层面与微层面
RTMS G4在微波束的发射方向上以0.38米为一层面分层面探测物体,RTMS G4微波束的发射角为50度,方位角为12度。
安装好以后,它向公路投影形成一个可以分为254个层面的椭圆形波束。
它可以测量微波投影区域内目标的距离,通过距离来实现对多个车道静止车辆和行驶车辆的检测。系统不但可以自动识别并划分微层面来定义检测区域,而且用户可以手动调整微层面,以使得检测区域能够在一个精细的范围内进行调整:
?使检测区域和车道、或车行线路非常契合;
?有效屏蔽中央隔离带、防眩光板、交通设施带来的影响;
2.7.2RTMS的工作过程
首先,RTMS在通电开机后自动进行背景学习,接收天线检测到路面的回波信号后,会根据回波信号的强弱自动生成背景阈值。
当有车辆经过检测断面时,由于车辆近侧面回波信号强度高于背景阈值,则判断该车辆所在车道有目标存在。
目标车辆驶离检测区域,车检器接收的回波信号恢复到背景阈值以下,等待下一次检测,同时将车流量、时间占用数据记录到检测器内部的缓存中,待记录周期结束后输出结果。
RTMS的工作状态就是以一个较高的频率重复上述的工作过程:X3在高速公路/快速路应用中采样频率是5次/秒,在城市路口应用中的采样频率是1次/秒;而采用阵列雷达天线技术的G4的采样周期则高达800次/秒。
RTMS工作示意图如下。车辆经过检测区域时,RTMS会采集到车辆的车头、车身、车尾的多个数据。得益于超高的探测频率,以及0.38米的雷达分辨率,RTMS能够适应5-
250Km/h的车速范围,在
车辆缓行甚至交通拥堵的
情况下,RTMS依旧可以
正常工作。
三、R TMS的功能
与特性
3.1性能
微波雷达检测器是一个实时再现的检测器,设备适合安装在路边的立杆或横跨路面的结构上,并提供以下功能:
●再现在检测区域内运动或停止的车辆
●按用户所设定的数据周期(范围从10至600秒)提供交通数据,并可以通
过串行通信线传输到其它设备。
●交通数据必须和代表每一个检测车道的对线开关同步。
●在路边侧向模式中,12个车道中每个车道的数据必须包括以下内容:
1)车流量
2)车道占有率
3)平均速度
4)有4个由用户所定义的车辆长度分级
●微波雷达检测器安装在横跨结构上(前方正向模式),必须监测单独一条车
道并提供以下交通数据:
1)车流量、占用率、平均速度和车辆行驶方向
2)每一车辆的速度、行驶方向和长度
3)分级范围内的统计车流量,多达7个速度分级和7个长度分级
●微波雷达检测器允许用户定义传送数据的内容
●微波雷达检测器通过串行数据提供远程电源电压指示(包括电池)
3.2测量精确度
检测器可以实时检测到通过检测区域的车辆,精确度可达95%以上。根据
不同的使用模式、符合要求的安装条件,设备可以达到以下精确度:
指标侧向错误率正向错误率
车辆通过再现+/-5% +/-2%
车流量 +/-5% +/-2%
车道占用率+/-5% +/-2%
平均速度+/-10% +/-2%
每一车辆速度不提供+/-2%
行驶方向不提供+/-5%
长度分级+/-10% +/-10%
采样间隔10ms 10ms
3.3机械性能
微波检测器封装在一个结实的密封防水盒中,可以抵抗90公里/小时的风速,可以暴露在潮湿或充满粉尘的空气中(NEMA 3R型外壳)。
尺寸: 24x16x18.5 厘米(9.5 x 6.25 x 7 英寸)
重量: 2.2公斤(5 磅)
安装配件必须使用镀锌钢、不锈钢或铝结构,使其可以支持20磅的重量。安装配件包括一个球形连接器或其它允许使用的机械结构,设备可以向两个坐标轴倾斜并固定,以达到最佳的覆盖区域。
3.4电气性能
微波检测器的工作电压为12-24VAC/DC,功耗不超过4.5瓦,或95-
135VAC@60Hz。电源可以由控制器集线盒上的电源变压器提供,或任何其它可供使用的电源设备。
微波检测器内置电源管理器,允许远程关机和周期性关机。
设备还具有低电压和高电压断电保护功能,以保护电池。
3.5无线数字扩频射频调制技术指标
射频原理无线跳跃扩频
频带 902-928MHz ISM 频带
工作模式侍动或中继操作
跳频模式64 模拟随机可选序列
发射功率 1mW, 10mW, 100mW or 1W 可选
天线内置鞭状天线或外部鞭状/波道式天线
工作距离可达3.0公里,由发射功率、天线和可视距离决定
校验码 CRC-16
网络编址最大值65535 地址码
加密组合可达65535种组合
接口异步接口,AT命令集,隐式数据集
无委标准 FCC 标准第15部分认可。许可在美国使用
温度范围 -45°至 +70° C
附加电源消耗正常工作条件下 1W
3.6RTMS标准安装
RTMS的标准安装如下图所示。
RTMS通信方式便捷且公开通信协议,方便与具体集成系统配套,便于用户二次开发软件。
辅助机箱:
?RS-232 连接器
?变压器
?可选调制解调器
交流电
RTMS的标准安装
3.7可靠性
MTBF(平均无故障间隔时间)≥90000小时(10年)
四、数据连接及通信
4.1电缆
一条带MS端接头的电缆连接微波雷达检测器和集线设备。
电缆为微波雷达检测器提供电源,输出串行数据和每一个车道的对线开关,电压可达300V AD/DC 100mA。
一个接线盒或集线盒用于放置数据接头,接线盒必须放置在所检测车道的可视范围内,以方便设备的原始设置或以后改变参数。
电缆是UV-阻抗,型号AWG#20或#22的双绞线,具有耐压300V和耐105o C高温的保护层。
所有电源线、对线开关和串行端口线都是相互绝缘的。电源线和串行端口线都在设备内有峰涌保护装置。
4.2数据通信接口
数据通信为全双工的异步通信方式,支持TSS的NTCIP协议1209。它的设置如下:
?Opto-隔离 RS485 或 RS232,端口波特率2400-115200。
?数据格式是标准的二进制NRZ 8位数据、1停止位、无奇偶校验。
?同时支持点对点和多点联接。
?可以选择使用一个整合数字扩频无线调制解调器。
?可以选择使用以太网 (TCP/IP)协议。
五、R TMS系统的应用
RTMS(远程交通微波雷达检测器)利用原有的立杆进行安装(路灯立杆,CCTV立杆等),并按照一定交通检测基站所需要的密度悬挂RTMS和调制解调器集线盒。交通数据通过调制解调器传送到已有的光纤网络,并送回快速路管理中心。管理中心的FTMS(Free Traffic Management System高速公路管理系统)软件负责对交通数据进行分析,报告,存档和事故分析。
RTMS系统以微波雷达车检技术为核心,提供一个多用途、容易实施的公路交通管理系统和事故自动监测系统。每30秒钟将实时收集到的交通数据传送到总控中心。每一个VDS(交通监控点)提供流量、占有率、平均速度、长车
流量数据,并监控3-4车道,交通数据通过调制解调器连接现有光纤网络,接到管理中心的控制计算机。
控制计算机通过光纤网络一次性收集所有区域信息。它的任务是收集所有区域信息并进行存档、分析、实时检测出交通事故。
六、 R TMS 的技术分析
通过上述对于RTMS 的技术分析来看,双雷达车辆检测器是目前市场上RTMS 产品的主要竞争对手,在这里首先分析一下双雷达技术:
双雷达检测技术主要是针对数字单雷达产品比较难以克服单车速度测量的问题而研发的,其解决速度问题的思路在于:从微波车检器探头发射出发出两个夹角极窄的波束,然后接收这两个非常窄的波束的回波(有工具软件帮助调整探头垂直车道),这样能在车道上形成前后两个检测点,“模拟”出每个车道上两个线圈的检测环境。
我们来对比一下线圈检测器的前后线圈和微波检测器模拟的“前后线圈”。
但是,因为数字双雷达微波检测技术还是基于两个数字单雷达收发系统,雷达的性能本身并没有得到质的提高,这导致在实际的使用过程当中,很容易出现下述很难从雷达技术层面解决的问题:
在道路车流量相当的情况下,双雷达微波检测技术无法保证精确地测量
车辆同一个位置进入第一波束(前线圈)和第二波束(后线圈)的时刻,导致测速的不准确。
微波束是从路面的侧上方发射出来,那么意味着除了离微波车检器最近的一个车道以外,在车辆数相当的情况下,其他的每个车道都或多或少地有遮挡的问题。当一辆车被完全或部分遮挡,这辆车的同一个位置进入双雷达微波车检器的第一波束(前线圈)和第二波束(后线圈)的时间间隔会严重失真(有时根本就没有进入第二束波),这样导致测速不准。只有当道路上仅有一辆车通过时或很小流量的情况下“双雷达”微波车检器才有可能做好。
线圈 检测器
前线圈
后线圈
立柱
前线圈 后线圈
线圈检测原理中的前、后线圈之间的距离是恒定的,但是因为“双雷达”微波车检器安装在一个无法保证绝对稳定的立杆上,各种因素会
导致第一波束(前线圈)和第二波束(后线圈)之间的间距会产生变
动,引起误差。
当“双雷达”微波车检器稍有向侧面偏移时(在实际工程中因为风、
震动、安装支架松动或者撞击等诸多因素,这种情况无法避免),或
车辆做变线行驶时,“双雷达”微波车检器的两个接收波束之一或全
部收不到反射信号,或者说第一波束(前线圈)和第二波束(后线
圈)之间的间距发生了改变,间距不再恒定了,因此其检测单车速度
会出现明显偏差。
而且,现在市面上出现的“双雷达”微波车检器并没有真正使用两个雷达单元,只是用一束雷达波的两个副波瓣来“模拟”出两个雷达单元的效果:
并且这种“双雷达”微波车检器被迫极度收窄信号发射方位角、增大信号射角、提高发射功率和增大带宽来使得雷达的副波瓣能够工作,显而易见带来的一系列问题是无法解决的。从原理上来说,其在某个大型城市应用的所有设
备出现了雨雪天气不能正常提供数据、车辆较多时速度精度反而下降、车型分类偏差较大和功耗高等问题从技术角度来说难以克服。
RTMS和“双雷达”设备对比表
日千里的中国来说,道路车流量会越来越趋于稳定和饱和,只有适应这个基本国情的产品才能长久地应用下去。
大数据环境下GPS数据在交通流的应用
大数据环境下GPS数据在交通流的应用 作者:王文斌 摘要:随着我国社会经济的快速发展和城市化进程的加快,道路交通己成为制约城市发展的重要问题,解决道路交通瓶颈己成为各级政府部门需要解决的首要任务。多年来,国内外实践经验证明,在解决城市交通问题方面,除了要有相应的宏观交通政策予以支持,现代化的交通管理手段也是十分重要的一环。与此同时计算机技术、电子技术等高新技术的发展,也为交通管理提供了解决交通问题的新思路和新手段,为最大限度地发挥现有道路系统的工作效率提供了技术支持。发达国家交通发展实践表明,采用智能交通系统是解决交通拥堵减少交通事故、防止交通污染、提高交通管理水平的最有效的方法和手段。 关键词GPS;交通流;智能交通系统 0.引言 进入信息化新时代以来,我国经济发展迅速,在经济不断促进城市现代化建设的同时,城市车辆总数也收到经济增长的刺激而不断增长。伴随着经济的快速发展,各种各样的问题慢慢涌现,其中较为明显的是道路交通建设的速度远远落后于经济的发展速度,特别是基础设施建设速度受到了限制。交通拥堵等城市交通问题也逐渐成为了影响城市居民日常出行的大问题,在影响市民日常生活的同时对社会的影响也不容忽视。从另一方面来说,这种困扰也同样制约了经济和社会的进一步发展,引发了一系列问题,因此便促使了城市智能交通建设这一新领域,而近几年也得到了长足的发展。 就目前城市交通状况来看,继续沿用传统工艺,即建设新道路以及拓宽原有城市主干道的方法并不能从根源上使城市的交通问题得到快速的缓解,并且这种方法伴随着高成本、低效率的缺点,在现实社会中实现的难度越来越大。 1.研究背景与意义 建立智能交通分析系统,可以对城市全天的交通状况进行科学分析,保证分析的全面性,也可以对城市交通状况进行准确的预测,将道路交通信息反馈给监管部门,可以实现政府高效的利用城市道路交通,降低城市道路拥堵的几率同时提高整体的交通通行效率,为市民们节省了出行时间。其中主要针对同时段不同路段车流量以及车辆平均速度以及同一路段不同时刻车流量与车辆速度之间的关系进行分析。并对结果进行网页展示,更加具象的体现了分析结果,对城市的道路交通发展具有重大的意义原始的交通信息采集方法,将采集后的交通信息进行暂时的存储后批量上传,因此时效性差;其次信息采集的方式主要以传感器包括红外传感器、压力传感器等为主,检测的数据较为单一,因此不能保证数据的较高准确率。以上几点当前城市交通信息采集系统的缺陷导致了交通数据分析的时候不能达到较高的水平和精确率。 当前的主流交通分析系统大部分只针对当前道路平均速度来判断道路的拥堵程
几种主要车辆检测器的对比
几种主要检测技术的对比 道路交通信息采集是智能交通系统的一项重要内容。在道路交通信息采集技术中,环形线圈车辆检测器因其技术成熟、易于掌握、初期建设成本较低而成为当前国内用量最大一种检测设备。但是,环形线圈检测器同时具有获得的信息量少,难于安装和较低的灵活性等缺点。为克服以上不足,微波车辆检测器和视频车辆检测器技术得以发展并应用于城市道路和高速公路的交通信息检测。 下面对几种检测技术的优缺点做具体分析 随着道路交通检测技术的发展,基于视频图像处理、模式识别技术的视频车辆检测器应运而生。视频车辆检测器具有采集信息量大、区域广泛、设定灵活、调整维护简便等特点,与传统的交通信息系统采集技术相比,视频检测器可提供现场的视频图像。 1.地感线圈 环形线圈车辆检测器是传统的交通检测器,其工作原理为在道路上埋设感应线圈,感应线圈与车辆检测器连接。当车辆经过线圈时,由于线圈电感量的变化,车辆的通过状态变化将被检测到,同时将状态信号传输给车辆检测器,由其进行采集和计算。 环形线圈车辆检测器相对于其他检测器具有低成本、高可靠性、高检测精度、全天候工作的优点,是目前应用最广泛的车辆检测器。 缺点:1、按照环形线圈施工要求,检测线圈在初次安装时要切割路面,植入环形检测线圈。封路施工不可避免会造成交通阻塞,对于城市主干道交通产生影响。2、埋植线圈的切缝容易使路面受损,缩短路面及检测线圈的使用寿命。实际使用中尤其对沥青路面的损坏更为严重,导致检测线圈的损毁率居高不下,使用和维护成本上升,影响系统的可用性。3、检测线圈容易受到路面下沉、裂缝、冰冻等环境影响,产生误报。4、受自身测量原理限制,当车流拥堵、车辆间距较小时,其测量精度大幅度下降,不适于城市交叉路口交通流检测。5、环形线圈车辆检测器一经设置即固定不变,在道路通行状况改变时调整困难。 2.微波车辆检测器 微波车辆检测器是以微波对车辆发射电磁波产生感应原理为基础。以RTMS微波为例,其工作方式为:悬挂于路侧,在扇形区域内发射连续的低功率调制微波,
对照课程标准、考纲,如何把握复习中各知识点的深度和广度.
对照课程标准、考纲,如何把握复习中各知识点的深度和广度 必修3部分 1、P5对内稳态中pH的调节的处理: 需结合实例展开讲解,建议此部分可结合原教材复习。 2、P16反射的种类及其比较: 增加反射的种类及其区别:非条件反射、条件反射,从建立时间(先天、后天)、参与的神经中枢(大脑皮层及其以下区域、大脑皮层)、刺激种类(直接刺激、信号刺激)等加以区别。 3、P19神经递质的种类和作用(兴奋、抑制): 建议介绍教材P19相关信息,并就兴奋性递质和抑制性递质做适当补充。 兴奋性递质:乙酰胆碱(对心肌是抑制性递质),谷氨酸,多巴胺,肾上腺素,去甲肾上腺素,ATP;抑制性递质:5-羟色胺,甘氨酸,γ-氨基丁酸。 4、P20人脑的功能: 适当介绍各种功能区(躯体感觉中枢、躯体运动中枢、各种语言中枢),让学生了解感觉、运动、语言、思维、记忆各功能是如何与结构相适应的。 5、P25血糖调节、P32水盐调节、体温调节的处理: 降低平衡的要求(简单介绍来源去路作为铺垫),侧重调节。其中血糖调节需重新整理调节网络,将胰岛素、胰高血糖素、肾上腺素对血糖浓度的作用都显示上,同时显示拮抗作用和协同作用,具体的可借鉴选修全一册教材。 6、P23动物激素的调节和动物激素在生产中的应用部分的处理: 此部分应该在教材的通过激素的调节部分体现,但此部分教材过于简单,因此需要补充。动物激素的调节部分应有:各种内分泌腺分泌激素的种类和作用、激素的调节、内分泌异常引起的病症及其治疗方法;动物激素在生产中的应用:催肥、促进产卵等的介绍及对人类生产生活的影响。 7、P35人体免疫系统在维持稳态中的作用的处理: 应从免疫系统的组成、免疫系统的功能两大方面展开。免疫系统的功能从防卫、监控、清除几方面加以展开,其中防卫功能又分为正常防卫(教材中介绍的非特异性免疫和重点介绍的两种特异性免疫)和异常防卫(防卫过当——自身免疫病和防卫不足——免疫缺陷病),此部分建议按照原教材进行整理。在免疫缺陷病部分,详细介绍艾滋病的发病机理、症状、传播途径及预防措施,并结合所学的知识引导周围的人远离艾滋病。 8、P50生长素的生理作用的处理: 教材对此部分的介绍过于简单,此处需要补充:促进果实发育(无子果实的产生)(可按照原必修第一册教材补充介绍)。
车用微波检测器的改进设计.
!曼型!!!! 二!!!! ■ —■- I「亠■ ■ ■ ■■ ■ ■ ■ CNl 1—2034/T 实验技术与管理 Experimental Technology and Management 第27卷第3期2010年3月 V01.27 No.3 Mar.2010 车用微波检测器的改进设计 梁涛,骆 (西华大学交通与汽车工程学院,四川成都 610041 摘要:微波检测器具有检测精度高等优点,但在野外的车辆使用中发现一些问题。为此,主要对微波检测器进行了刻度盘、电源、升降杆的改进设计。实践证明改进后的仪器在道路交通流的检测中起到了方便快 捷的作用。
关键词:微波检测器;刻度盘;升降杆中图分类号:TN015 文献标志码:B 文章编号:1002—4956(201003—0071—03 Improved design by using microwave detectors Liang Tao,Luo Yong (School of Traffic and Auto,Xihua University,Chengdu 610039,China Abstract:Microwave detector has many advantages such as high accuracy,etc.However,in the process of real applications some problems were discovered.This design mainly improved the dial,the power supply and the lift bar.Practice has proved that after improvement the microwave detector becomes more convenient and faster during the road traffic flow detecting in the field.Key wor 凼:microwave detector;improvement;convenience 1微波检测仪器的特点 美国SSI05微波车辆检测器利用10.525GHz的工作频率来采集交通数据,属于频率调制连续微波。主要特点是[1 。3]:
RTMS微波车检器原理介绍
知其然,更知其所以然 ——RTMS微波车检器原理介绍1、前言 2008年RTMS微波检测产品纳入百联智达的产品线至今已有4年,到2012年,百联智达仅微波车检器产品销售额已突破两千万。从国内市场来看,城市ITS 建设项目中微波车检器的需求逐年大幅度增长,高速公路ITS项目上也逐渐开始试点微波车检器的大规模应用。从微波车检器产品本身来说,国内依旧是以“阵列雷达”与“双雷达”两种技术对抗、以RTMS和SmartSensor两家产品为主流、“国产阵列雷达”和“单雷达”以低价拿小单的特点,形成了目前的主要竞争格局。 相信大家对RTMS微波车检器的各项指标已经熟悉,但我们在跟客户做技术交流时,往往会遇到客户问起一些更深层次的问题,比如“你们的阵列雷达,一共有几个雷达?”、“用了你们的雷达,如果车被挡住了,还能检测到吗?”、“你们的雷达能测速吗?”等等,这就需要我们的售前和销售人员在熟知产品指标的基础上,能够对产品的相关原理有一定的了解,在面对用户的各种奇怪问题时,能够从容应对,体现我们的专业性。在此,借助内刊这个平台,我将自己搜集到的一些RTMS产品的相关资料分享给大家,期望能够起到抛砖引玉的作用,与各位同事共同学习、提高。 2、RTMS的基本介绍 RTMS,即“The Remote Traffic Microwave Sensor”,从字面上翻译过来,就是“远程交通微波探测器”。这个名字体现了RTMS的三个主要特点:远程检测、专用于交通数据采集、工作在微波频段。 “R”远程检测,这个很好理解:RTMS可以检测几米到几十米内的车辆存在,而不需要像线圈、地磁等那样与车辆近距离接触,所以叫远程检测。 至于交通“T”数据采集方面,路侧安装的RTMS可检测断面上的车辆长度、平均车速、占有率、车型分类、车间距等交通参数,并通过串口周期上传至后端
深度剖析——学习中如何进行基础知识深度掌握
深度剖析——学习中如何进行基础知识深度掌握 但凡成绩优异者,问其经验,都会说:狠抓基础。但是 对基础一词,如何去理解?大多数学生对于基础的认知仅仅停留在课本上或者辅材上的黑体加重部分。确实这一部分的知识是重点不假,但是对于这些重点如何掌握,也是判定基础是否扎实的标准。 有的学生认为记住了,就说明掌握了;有的学生认为会用了,就说明掌握了。正是因为这种对基础模棱两可的判断标准,就导致了学生对于基础掌握无法做出科学理性的判定。 现象分析 我们来分析这样一种现象:基础知识自己能够记住,基础知识自己也能够理解,但是一旦将基础进行到了实际应用中 做题)的时候,就会发现用不起来、用起来很别扭、用起来特别容易出错。 很多学生认为:这是做题少的缘故。 确实,练习能够有效的缓解难用的现象,但是仅仅靠练习,是不能让自己有信心从容地面对所涉及知识点的应用的。 究其根本,学生需要对基础知识是否有深度的理解。 举个例子:在初中和高中都会讲到立体几何,随便问问周边的10 个同学,就有那么三两个同学明确的告诉你,立体几
何很简单。但是还是有大部分同学对此感觉非常吃力。 眼光重点关注在什么地方,就决定了学生对于此知识的理解深度。一维的线关注点;二维的面关注线;三维的体关注面。 所以对点线面的重点观察,则是学好立体几何的关键。 基于这样的思想,在立体几何中,三视图和直观图,以及点线面的位置关系,就变成了极其简单的知识点。 直观图T三视图或者三视图T直观图无非就是关注核心的点,关键的线,重要的面。基于点知道了大概结构;基于线知道了它的具体形状;基于面知道了它的特殊性具体的就语音讲吧,“福聿学习之道辅导”平台里有,喜马 拉雅里也有,写还不知道也写多少字。 其实举这样一个例子,无非就是告诉大家, 在学基础的时候, 不仅仅是做表面文章,还需要对知识进行深度理解。 由概念衍生出知识点,这是学习的过程; 将知识点融入概念,这是一个掌握过程; 根据知识点总结应用方向这是熟练过程; 由知识点衍生掌握和应用技巧,这是创新的过程。 而这一系列的过程都属于基础知识的范畴。 举例过程,还是得借助录音,要不然文字阐述就过于啰嗦了。 所以但凡老师都是将基础看得特别重,因为老师的成长经历和教学经验让老师都有这样的感悟:没有基础,没有高分。 学生对于基础的轻视,在于学生对“什么是基础”的理解不够透彻。老师
远程交通微波雷达检测器(RTMS)的深度解析知识讲解
远程交通微波雷达检测器(R T M S)的深度解 析
远程交通微波雷达检测器(RTMS)的深度解析 一、概述 1.1什么是RTMS RTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。 1.2RTMS的应用领域 RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。 1.3RTMS的发展历程 1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线: 图错误!文档中没有指定样式的文字。-1微波车检器发展历程
我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。 从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达: 数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快; 数字阵列雷达分辨率极高,能取得目标精确位置; 数字阵列雷达能在恶劣的天气气候条件下正常追踪目标; 数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。 二、R TMS的工作原理 2.1雷达线性调频技术 线性调频信号可以获得较大的压缩比,有着良好的距离分辨率和径向速度分辨率,所以线性调频信号作为雷达系统中一种常用的脉冲压缩信号,已经广泛应用于高分辨率雷达领域。直接数字频率合成(Digital DirectFrequency Synthesis,DDS)技术是解决这一问题的最好办法。在雷达系统中采用DDS技术可以灵活地产生不同载波频率、不同脉冲宽度以及不同脉冲重复频率等参数构成的信号,为雷达系统的设计者提供了全新的思路。 2.2雷达技术 “雷达”是英文radar的音译,为Radio Detection And Ranging的缩写,意 思是一种无线电检测和测距的电子 设备,其原理是雷达设备的发射机 通过天线把电磁波能量射向空间某 一方向,处在此方向上的物体反射 碰到的电磁波;雷达天线接收此反 射波,送至接收设备进行处理,提 取有关该物体的某些信息(目标物 体至雷达的距离,距离变化率或径 向速度、方位、高度等)。 测量距离实际是测量发射脉冲 与回波脉冲之间的时间差,
深度学习基础地的知识整理
深度学习基础知识整理 Without deviation from the norm,progress is not possible(不偏离常规,就无法取得进步-Frank Zappa)
第一课:数学分析与概率论 Taylor展式及其应用、凸函数、jensen不等式、常见分布与共轭分布 第二课:数理统计与参数估计 Chebyshev不等式、大数定理、小数定理、中心极值定理、矩阵计算、最大似然估计 第三课:矩阵和线性代数 从马尔克夫模型看矩阵、特征向量、对称矩阵、线性方程 第四课:凸优化 凸函数、共轭函数、凸优化、Lagrange对偶函数 第五课:回归 高斯分布、Logistic回归、梯度下降、特征选择与过拟合欠拟合关系 应用方向:线性回归、Logistic回归实现和分析 第六课:梯度下降与拟牛顿法
梯度下降算法、自适应学习率、拟牛顿、LBFGS 应用方向:自适应学习率代码实现和参数调试分析 第七课:最大熵模型 熵、相对熵、信息增益、最大熵模型、Softmax回归 应用方向:独立成分分析ICA求解盲源分离BBS问题 第八课:决策树和随机森林(蒙特卡罗)ID3、C4.5、CART、Bagging 研究方向:使用随机森林进行数据分类(蒙特卡洛) 第九课:SVM 线性可分支持向量机、软间隔、核函数、SMO 研究方向:使用SVM进行数据分类 第十课:聚类 K-means/K-Medoids、密度聚类、谱聚类、 应用方向:K-means、谱聚类代码实现和参数调试分析
第十一课:推荐系统 相似度量方案、协同过滤(User-based/ltem-based)、PCA/SVD、随机游走 应用方向:协同过滤用于商品推荐、SVD隐变量的推荐 第十二课:提升 梯度提升决策树GBDT、Adaboost、前向分步算法 应用方向:Adaboost与随机森林(蒙特卡洛)结合、用于数据分类 第十三课:EM算法和GMM EMM算法、GMM、主题模型pLSA 应用方向:分解部分观测数据的男女身高、图像分解 第十四课:普斯贝叶斯和贝叶斯网络初步 有向分离、(隐)马尔科夫模型HMM 第十五课:主题模型用EM算法计算pLSA、Dirichiet分布、LDA、Gibbs采样
远程交通微波雷达检测器(RTMS)的深度解析(优选.)
远程交通微波雷达检测器(RTMS)的深度解析 一、概述 1.1什么是RTMS RTMS(Remote Traffic Microwave Sensor 远程交通微波雷达检测器)是一种用于监测交通状况的再现式雷达装置。它可以测量微波投影区域内目标的距离,通过距离来实现对多车道的静止车辆和行驶车辆的检测,并且利用雷达线性调频技术原理,对路面发射微波,通过对回波信号进行高速实时的数字化处理分析,检测车流量、速度、车道占有率和车型信息等交通流基本信息的非接触式交通检测设备。 1.2RTMS的应用领域 RTMS主要应用于高速公路、城市快速路、普通公路交通流调查站和桥梁的交通参数采集,提供车流量、速度、车道占有率和车型等实时信息,此信息可用隔离接触器连接到控制器或通过串行接口连接到其他系统,为交通控制管理、信息发布等提供数据支持。 1.3RTMS的发展历程 1989年加拿大人Dan Manor第一个将雷达技术应用于智能交通行业,发明了微波车辆检测器。短短十几年间,微波车辆检测器已经经历了几代的变革:从模拟到数字、从单雷达到多雷达、从喇叭天线到平板天线:
模拟 单雷达车辆检测器(感应式) 数 字 单 雷 达 车 辆 检 测 器 数 字 双 雷 达 车 辆 检 测 器 阵 列 雷 达 车 辆 检 测 系 统 阵列 雷达 视频 等技 术融 合综 合车 检系 统图错误!文档中没有指定样式的文字。-1微波车检器发展历程 我们从每一次的变革中看到,微波车辆检测器技术的发展和雷达技术、电子技术、计算机技术的发展紧密相关。 从雷达技术的层面上来说,数字阵列雷达技术从上世纪借鉴仿生学开始,在较短的时间内得到不断完善和提高。进入21世纪后伴随着数字电子技术和计算机处理能力的不断提升,数字阵列雷达的优越性得到了充分的体现:其多功能性、反应速度、分辨率、电子抗干扰能力、多目标追踪/搜索能力等都远优于传统雷达: 数字阵列雷达能在极短时间内完成监视空域内的扫瞄,目标更新速率极快; 数字阵列雷达分辨率极高,能取得目标精确位置; 数字阵列雷达能在恶劣的天气气候条件下正常追踪目标; 数字阵列雷达代表着雷达技术发展的必然趋势,它们是近代雷达变革的新技术和新体制的集中体现,是集中了现代电子科学技术各学科成就的高科技系统,所以现代化的精锐武器系统都以阵列的“平板雷达”为标准配备。 二、R TMS的工作原理 2.1雷达线性调频技术 线性调频信号可以获得较大的压缩比,有着良好的距离分辨率和径向速度分辨率,所以
微波对射探测器工作原理
微波对射探测器由微波发射机和微波接收机成对组成,其中微波发射机由调制信号控制电路、微波发生器、阵列发射天线以及探测器外壳组成;微波接收机由探测器外壳、阵列接收天线、信号检测器、信号分析和报警控制电路组成。探测器工作时,微波发射机经阵列天线发射出经过调制的微波射束,微波接收机经过阵列天线可靠接收到微波发射机发出的调制微波信号后,当微波接收机收到的信号保持不变或变化量不足以达到接收机输出报警信号的阈值时,接收机就保持在一个稳定的正常工作信号输出状态;此时在微波发射机和微波接收机之间形成的是一道不可见的纺锤状立体防范区域(微波墙),微波墙的高度和宽度由微波发射机和微波接收机的阵列天线所形成的束角决定,探测器的有效探测距离由微波发射机的发射功率、波束角度、微波接收机的灵敏度所决定;
当有物体从微波发射机和微波接收机形成的微波防线穿越或停留,微波接收机收到的信号产生变化,当变化量达到接收机设定的报警阈值时,微波接收机输出信号状态就发生改变(产生报警)。 微波对射探测器一般选用X波段或K波段的微波作为探测信号源,由于微波的穿透力高,所以微波对射在户外使用时很难受到自然环境的影响而产生误报。因此微波对射早期主要作为军事、石油、重点工业单位、重点保护单位的周界防入侵探测器。由于国内真正研发生产微波对射探测器的企业非常少,所以微波对射探测器一直以来都被国外的企业所垄断,国外的微波对射在国内售价非常高,调试过程也很复杂。 维安达斯是专注于高端入侵探测报警系统的民族品牌,维安达斯全数字式微波对射,拥有多项专利技术,首创耙式算法和极速调试模式,不光是探测距离远,工作稳定,而且调试非常简便,用户不用借助任何外部工具就可以快速完成调试。维安达斯微波对射目前被广泛应用于国内众多的监狱、看守所、油库、电站、博物馆等场所,为国内司法系统的智慧磐石工程发挥着重要的作用。
知识的深度与广度
你感兴趣的东西越多,你能够深入的就越少。你钻研的越深入,你有发现感兴趣的东西越多。有点绕,不过有感而发。我想到这句话的时候其核心仍然是想表达知识的深度和广度直接的关系问题,或者说其学习的先后关系和顺序问题。 首先任何一个知识广度的扩展都需要有一个专业性方向的深度的积累,而且这个积累经过了自我的实践,通过实践转化为了知识的经验和方法。如果我们感兴趣的东西太多,而这些方面的内容我们都没有办法进行实践性领悟,那么所有你感兴趣的知识领域你都无法深入去理解和领悟。还是这句话,理论不通过实践很难转化为自我的经验并指导后续的行动。你会发现很多领域你都知道,就是不清楚具体为何得出某些结论?你想深入学习又很难,很多东西你没有实践机会。 人的精力有限,感兴趣的东西越多,每个知识域上分到的时间自然很少,同时由于很多知识由于没有实践的机会,很多时候学完后很快就会忘记,不会带来太大的机制。只有真正实践后的经验是最不容易遗忘的。根据我原来谈到过的,知识的广度往往并不会产生直接的自我增值,知识广度本身是附着在某一个专业深度上的。 所以刚工作的时候,还是以某个专业领域的发展为主,很多东西可以关注,但是不用花太多的时间,一定要将时间用到专业技能的提高上面。工作前面2-3年的学习力最旺盛,只要有足够的兴趣,就有精力刨根究底深入学习,而且这个学习过程是和实践和工作完全结合的,那么学习后就很容易转化我自我经验。如果刚开始工作的时间就挑三拣四或者说换岗太快,沉迷到各种新鲜的工具,语言和技术上面,那么很可能将基础打深入的时间就荒废了。 前面几年过了后,你会发现你钻研的越深入,你有发现感兴趣的东西越多。这是完全正常的情况,任何知识领域在深入到一定的阶段后,必须要有更加广度的知识来支撑。知识本身无边界,很多时候专业性的工作也需要更加复合型的知识结构。这个时候你再去拓展知识的广度就属于完全合理的,这个时候一方面是有知识深入做积累,一方面是在拓展深度过程中遇到的问题来目标驱动广度知识的学习,更加有针对性。在广度知识学习中,你会发现很多内容跟你原来的实践总结很容易触类旁通,容易把原有疑惑的多个离散知识点融合起来。个人认为到了这个阶段最大的成果就是你会发现学习任何新知识都相当容易,基本不会遇到太多太大的困难和障碍。 在学校更偏知识广度,刚工作阶段则需要在某个专业领域深度上扩展,后续则从深度积累上转到广度的拓展和知识的融合,这是我考虑的一个学习顺序和思路。一开始就感兴趣东西太多,往往错过了自我核心专业技能,也丧失了后续专业深入的机会;后续如果在专业深入遇到瓶颈的时候,又不能想到拓展知识面和视野,往往又在自我能力上举步不前,这是我思考该问题的一个大原因。
T-11-V5-多目标追踪微波车辆检测器技术方案
微波交通检测器应用方案——T-11 V5 多目标追踪雷达 江苏志德华通信息技术有限公司 编辑者:高志鹏
1.Tracteh T-11 V5多目标追踪微波车辆检测器简介 1.1功能概述 ●Tractech T-11 V5多目标追踪微波车辆检测器(以下简称T-11 V5),是利用二维主动扫描式阵列雷达 微波检测技术,对路面发射微波,以每秒20次的扫描频率可靠地检测路上每一车道的目标,准确区分机动力、非机动力、行人等,可同时识别及跟踪最多64个目标对象。 ●可同时测量每车道的流量、平均速度、占有率、85%位速率、车头时距、车间距等交通数据,以及排队 长度、逆行、超速、ETA等报警信息,并可准确地测量区域内每个目标的位置坐标(X,Y)与速度(Vx, Vy)。 ●能进行大区域检测,沿来车方向正常检测区域至少可达160米,能同时检测至少6个车道,其中中间的 4个车道每条车道可以有4个精确的检测点,4条车道就可以配置16个精确的检测点。每个检测点就是一条线,这条线与路交叉成90度夹角,也就是垂直于路的方向。这些垂直于路的方向的检测线,就可以作为雷达的检测点,可以非常精确检测车辆接近并经过这些检测点时的状态 ●自动检测交通流的运行方向,进行车辆逆行检测统计。 ●采用前向安装的方式,可方便地利用既有杆件:信号灯杆、电警杆横臂、任一标志标牌、路灯杆上,具 有安装维护方便,不破坏路面,不影响交通,技术先进,成本低等特点。 ●可在全天候环境下工作,外壳达到IP67防护标准,并具有自校准以及故障自诊断功能。 ●可视化的图形化操作界面能实时显示每个目标在检测区域内被跟踪情况以及车辆即时速度、车辆长度等 实时信息。 1.2应用场合 T-11 V5 是一款革命性的通用交通管理雷达,可以用在交通管理领域的很多方面: 公路和交通管理系统
思想的深度,知识的广度,能力的高度
思想的深度,知识的广度,能力的高度 2012-01-05 14:12:54| 分类:默认分类| 标签:|字号大中小订阅 我与“课内比教学”征文 思想的深度,知识的广度,能力的高度 西流河一中吴中华 经过学校多次开会宣传,本学期由省教育厅发起,在全省范围开展的“课内比教学,课外访万家”的活动于十月份在我校拉开了序幕,进入了实施阶段。“课内比教学”分为三个阶段,分别是宣传、讲课、小结阶段。作为学校中年老师,我既参加了教学练兵的讲课,也参加了教学比武阶段的讲课。这次讲课又让自己经历了一次历练,收获了一些心得。 一、挖掘资源,准备充分。 在教学练兵中,我讲的课文是:人民教育出版社出版的八年级语文上册第二单元第七课朱自清写的《背影》,这是一篇写父子亲情的散文;在教学比武中,我讲的课文是:第三单元第十一课茅以升写的《中国石拱桥》,这是一篇介绍中国石拱桥知识的事物说明文。 为了上好课,我每次都认真的钻研教材,教案,教师教学用书,真正把课文的教学目标熟练地掌握在自己的心中。还要搞清楚课文的内容、结构、作者的写作思想、情感,课文的重点难点,教学时的切
入点,如何导入,如何设置问题,以及课堂上可能出现的哪些问题我都进行了预设。甚至还上网查找同类文章教学的课件。这样经过精心的准备后,再去给学生上课,一则心中有数一些了,二则能很好的掌控课堂。 除此以外,我还在下课的间隙时间里和同学们一起聊天,从而了解他们的一些思想特点,从和他们交流的过程中掌握一些信息,好在课堂上随时作为引用的材料。 根据我收集到的资源和材料,我分别把这两课制作成了可以教学的课件,这样就已经为说课和讲课作好了准备。 二、说课精练,注重过程。 在说课阶段,我从四个方面进行了说明。第一、说教材。主要是说说这一篇课文在本册书中所占的地位和在这个单元中讲这一课要注意的一些问题。至于教学的目标、重难点、突破点等,那也是在说课的范围之内的了。第二、说教法。也就是我在讲这一课时的构想,以及如何引导学生学习的方法,这个过程要说得详细点。第三、说学情。学生学这篇课文的基础、学生个人情感、经历等,老师都要事先了解一些,正所谓“知己知彼”吧!这样上起课来会更游刃有余一些。第四、说学法。即如何引导学生学习这一课,在课堂教学过程中要运用哪些方法。 课说完了以后,老师们分别提出了一些修改意见,我再进一步的进行完善,这样就可以进入下一个环节——讲课了。
城市交通流信息采集与存储
ICS 备案号: Q/EJ 城市交通信息采集与存储 浙江银江电子股份有限公司 发布
目次 前言................................................................................. II 引言................................................................................ III 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 城市交通流信息采集 (1) 5 城市交通流参数存储 (2) 6 说明 (6) 参考文献 (7)
前言 本标准由杭州市交警支队提出。 本标准起草单位:浙江工业大学、浙江银江电子股份有限公司本标准主要起草人:
引言 我国城市化发展已经取得了显著的成果,但随之而来的问题也逐渐显现出来,特别是城市交通拥堵问题已经逐渐成为阻碍城市化建设的最大问题之一。 作为城市交通领域未来的发展方向,智能交通系统已经成为国际和国内研究的热点。为规范我国智能交通系统的相关研究与应用,使之能健康、快速地发展,智能交通系统的相关标准的制定显得十分重要,不仅有利于开展产品开发和各种研究工作,而且能够提升我国交通运输行业的技术水平和服务质量。 城市交通流参数的采集和存储作为智能交通系统底层的数据源,其标准的制定有利于后期的城市交通信息标准化,使交通流信息的处理、发布等工作更加规范和具有条理性,从而有利于提高整个交通运输网络的效率。
城市交通信息采集与存储 1 范围 本标准规定了城市交通交通流数据采集要求和数据存储格式的基本内容。 本标准适用于城市交通中对机动车交通流信息的采集、存储等所需的性能要求、数据库表设计等。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 凡不注日期的引用文件,其最新版本适用于本标准。 GB/T 2312 信息交换用汉字编码字符集基本集 GB/T 18030 信息技术信息交换用汉字编码字符集基本集的扩充 GB/T 20133-2006 道路交通信息采集信息分类与编码 GA 329-2002 《全国道路交通管理信息数据库规范》 3 术语和定义 下列术语和定义适用于本标准: 3.1 车流量(辆/小时) 车流量是指在选定的时间内,通过道路某横断面的车辆数量。 3.2 车道占有率(%) 车道占有率是指某车道上车辆的长度总和与该路段长度之比。 3.3 平均行驶时间(分钟) 平均行驶时间是指车辆通过道路某一路段的平均时间。 3.4 平均车速(千米/小时) 平均车速是指车辆在某路段上行驶的平均速度。 3.5 排队长度(千米) 排队长度是指车辆的第一次停车断面与停车线之间的道路长度。 3.6 等待时间(秒) 等待时间是指车辆从第一次停车到越过停车线所用的时间。 3.7 采样周期(分钟) 采样周期是指相邻两次交通流参数从采集端开始传输之间的间隔时间。 3.8 误差率(%) 误差率是指采集端在进行交通流数据采集过程中所存在的误差。 3.9 延迟时间(秒) 延迟时间是指交通流参数由采集端传输到数据库进行存储所需要的时间。 3.10 延迟率(%) 延迟率等于延迟时间/采样周期。 4 城市交通流信息采集
最新几种主要车辆检测器的对比
几种主要车辆检测器 的对比
几种主要检测技术的对比 道路交通信息采集是智能交通系统的一项重要内容。在道路交通信息采集技术中,环形线圈车辆检测器因其技术成熟、易于掌握、初期建设成本较低而成为当前国内用量最大一种检测设备。但是,环形线圈检测器同时具有获得的信息量少,难于安装和较低的灵活性等缺点。为克服以上不足,微波车辆检测器和视频车辆检测器技术得以发展并应用于城市道路和高速公路的交通信息检测。 下面对几种检测技术的优缺点做具体分析 随着道路交通检测技术的发展,基于视频图像处理、模式识别技术的视频车辆检测器应运而生。视频车辆检测器具有采集信息量大、区域广泛、设定灵活、调整维护简便等特点,与传统的交通信息系统采集技术相比,视频检测器可提供现场的视频图像。 1.地感线圈 环形线圈车辆检测器是传统的交通检测器,其工作原理为在道路上埋设感应线圈,感应线圈与车辆检测器连接。当车辆经过线圈时,由于线圈电感量的变化,车辆的通过状态变化将被检测到,同时将状态信号传输给车辆检测器,由其进行采集和计算。 环形线圈车辆检测器相对于其他检测器具有低成本、高可靠性、高检测精度、全天候工作的优点,是目前应用最广泛的车辆检测器。 缺点:1、按照环形线圈施工要求,检测线圈在初次安装时要切割路面,植入环形检测线圈。封路施工不可避免会造成交通阻塞,对于城市主干道交通产生影响。2、埋植线圈的切缝容易使路面受损,缩短路面及检测线圈的使用寿命。实际使用中尤其对沥青路面的损坏更为严重,导致检测线圈的损毁率居高不下,使用和维护成本上升,影响系统的可用性。3、检测线圈容易受到路面下沉、裂缝、冰冻等环境影响,产生误报。4、受自身测量原理限制,当车流拥堵、车辆间距较小时,其测量精度大幅度下降,不适于城市交叉路口交通流检测。5、环形线圈车辆检测器一经设置即固定不变,在道路通行状况改变时调整困难。 2.微波车辆检测器 微波车辆检测器是以微波对车辆发射电磁波产生感应原理为基础。以RTMS微波为例,其工作方式为:悬挂于路侧,在扇形区域内发射连续的低功率调制微波,
公路交通量统计数据处理系统的分析
公路交通量统计数据处理系统的分析 发表时间:2018-12-21T16:06:48.650Z 来源:《建筑学研究前沿》2018年第29期作者:马渊海 [导读] 对该地区道路是否能够适应交通流量变化情况和车辆载重量进行客观的评价,该评价值将有利于我国具有地方性交通特点的建设规划的确立。 山西省公路局长治分局山西省 046000 摘要:交通数据统计是交通部门进行交通流量数据统计的重要工具之一。搞好交通量调查统计,直接关系着公路现代化建设和公路的科学管理,对公路事业的发展有着十分重要的意义。 关键词:公路;交通量统计;数据处理系统 引言 交通数据统计系统是交通部门统计交通流量数据资料的重要工具,利用该工具系统可以准确统计某一地区的交通流量数据值,并利用计算机系统对该数据值进行分析,最终得出该地区的交通流量一般值和历史值,最终有确立该地区的交通发展方向和交通发展策略,对该地区道路是否能够适应交通流量变化情况和车辆载重量进行客观的评价,该评价值将有利于我国具有地方性交通特点的建设规划的确立。 1、公路交通量统计数据处理系统的结构 1.1实时交通流量流量数据包接受装置 该装置是交通流量系统的数据接受装置,负责接受从交通流量观测站中发送过来的数据包信息,该装置的基本功能有:与SOCKET建立连接、数据包一步接收、评断发过来的数据包中的信息时候合法,筛滤重复发送的数据包、分析数据包中的数据信息、对原始数据包进行保存、备份,一般情况下保留五分钟之内的数据,同步统计数据计算,负责数据每小时、日的记录工作,将评断和计算过后的数据信息反馈给观察站系统,该信息反馈与输出多以EXCEL表格的形式。 1.2 数据包信息转发器 该装置的基本功能是将统计系统接收到的数据包转发给交通部系统DSC,为了在信息转发过程中不会因为网络的意外中断而导致统计信息丢失,数据包转发器具有独立运行的功能,在发送数据包的同时完成数据包的内部储存工作,转发器为整个统计系统提供了安全保障。 1.3 监控子系统 监控子系统相当于与一个机器内部运行监控者,其功能主要表现为:实时检查数据包接受装置运行情况、数据包转发装置的运行情况,交通数据统计系统服务器的运行情况,数据统计系统在发展意外情况是否及时储存以处理过数据并关机。可以说监控子系统在数据统计系统中起到管理员作用。 1.4 报表和查询客户端系统 该系统的基本职能有:在规定时段内检测制定观察站所传输过来的数据包,一般般情况下规定时段为每小时、每日或者每月,将该数据值汇总、记录并传送给统计系统,预测同时对数据备份,该装置将统计数据制作成EXCEL表格的形式储存于系统内,可供使用者实施下载,并且保持表格内数据实时更新与同步。 1.5 在线数据分布系统 该系统能够及时有效的为全社会交通系统提供有效的统计数据,是一个数据信息发布平台,该系统的基本功能为:按规定时间公布特定地点车流量变化情况,保留单向车辆流量情况、车辆具体吨位、载重数、车流方向、公路断面的车流量值等等,对于某些重要的车流量信息该系统采用每五分钟更新一次,其他车辆信息按其重要性分每小时、每日、每月更新。 2、交通量统计的指标体系 2.1流量指标 主要包括路段、路线的平均交通量和路线行驶量TV两个主要指标。其中,路段或路线平均交通量表示在某一段时间间隔内路段交通量的平均值,以辆为单位,系统需实时更新;而路线行驶量则按照年或月更新数据,表示以单位时间内交通量与其行驶路程的乘积,以万车公里为单位。 2.2交通量时间分布指标 主要包括三个方,第一,12H、6H交通量系数RD12、RE16,就是指12H(7时-19时)或16H(6时-22时)交通量与全天24H交通量的比值,以%为单位,以年为频率进行数据的更新;第二是月不均匀系数KM,表示年平均日交通量与月平均日交通量的比值,以%为单位,按年进行数据更新;第三,周日不均匀系数KW,表示年平均日交通量与某周日平均交通量的比值以%为单位,按照年进行更新数据。 2.3道路运行质量指标 主要包括三个方面的指标,分别为道路运行质量指标QE、平均形势时间和平均形式速率等。这三个指标都是需要系统实时更新数据的。其中,道路运行质量指标QE中,将道路当前运行质量定义为畅通、基本畅通、拥挤、堵塞四级指数,分别对应于一、二、三、四级服务水平。而平均行驶时间则表示各车辆通过观测路段所用时间平均值,以分钟为单位;平均行驶车速则表示路段长度与各车辆通过观测路段所用时间平均值的比值,以公里/小时为单位。 2.4其他指标 结构指标主要是车型比例VR,表示交通流中各种类型车辆间数量的比例,以%为单位,按照年和月更新数据。道路适应程度指标,主要是道路适应度AL,表示年平均日交通量与适应交通量的比值。交通量方向分布指标,即方向分布系数KD,主要方向交通量与双向交通量的比值。 3、交通量统计资料的应用 3.1为道路养护管理提供依据。为提高公路养护的质量和经济效益,道路的经常性维修经费及养路定员编制的额定,以交通量的大小及道路施工质量、线路性质及养护经费等情况综合确定,并以交通量大小作为主要的决定因素,充分利用观测数据为道路养护管理服务。如
微波交通检测器
交通信息检测设备分析—微波交通检测器 卢勇 (江西梨温高速公路公司进贤 331721) 摘要:本文对交通信息采集技术和检测设备的选用进行了综合性能的评估,并对现有检测技术应用现状进行分析。重点介绍了江西梨温高速公路关于微波检测器的试验安装过程和测试结果。关键字:信息工程;交通信息采集;微波检测器;安装测试;应用现状 0 前言 随着社会经济的快速增长,人民生活水平的不断提高,道路交通需求愈发旺盛。近年来道路基础设施建设的步伐加快,道路网已初具规模。大型道路系统的数据化信息化管理也对基础的数据采集系统提出了新的要求,交通信息数据的采集手段和工具越来越受到人们的重视。 交通信息采集的主要任务是获得道路上的运行信息,包括车流量、车速、车型分类、占有率等信息。准确有效的信息使道路管理部门能够在此基础上做出正确的决策规划,保障道路系统的有效运行。 目前应用的交通信息采集方式主要有三种,即电感线圈检测、视频检测和微波检测。 1 交通数据采集技术和检测设备的选用 交通信息数据采集系统的检测设备是进行道路信息管理的基础,准确完整的交通信息采集是实现道路信息管理的前题。如何选用有效的交通信息数据检测设备可以从以下几个方面进行评估选择:技术发展、设备性能、相关成本、安装维护等。 1.1技术发展 检测技术的应用与发展趋势,是选择检测设备时的重要因素。 1.1.1考察该技术的现状和应用对于现有的检测设备,考察国内外该技术的发展现状和应用情况。1.1.2判断该技术的发展前景从系统供货商处取得相关技术的研发信息,以了解系统未来功能扩充的方向,判断该项技术是否是会成为或将会成为市场应用的主流技术。 1.2设备性能 1.2.1功能是否符合需求例如是否能满足交通流量、占有率等应用的需求,以及其精确程度。 1.2.2系统整合及扩展性所提供的数据参数和数收稿日期:2004-7-29 据传输格式是否符合国家标准,在未来是否可与其他系统兼容。其功能是否能够满足未来系统扩展的需求,如检测车道数的增加等。 1.2.3作业环境的影响设备在复杂环境下应用的可靠性稳定性。如雾、风、雨雪、光照、阴影和震动等环境。 1.3相关成本 虽然在实际的系统规划设计完成前,要精确地估算成本并不容易,但仍然可以从几个方面来进行相关的成本评估。 1.3.1初期成本该部分包括购买设备时的单位产品售价、初次安装时的工程安装成本。 1.3.2后期成本该部分包括后期设备运作成本、产品维护成本、以及维护维修时对周围环境的破坏程度和所造成的交通影响成本。 1.4安装维护 1.4.1对交通造成的影响包括中断或阻碍交通运输的范围与时间。 1.4.2对周围环境的影响安装维护过程中是否会对周围的道路设施等进行破坏和干扰。如对路面的破坏等。 1.4.3维护或维修的需求设备是否需要经常性的校准和调整,或设备不稳定、经常性地出现故障待修等。 2 微波交通检测器安装测试 2004年4月,为便于与地买式线圈车检察器数据比对,在江西温厚高速,K0+340和K1+850 处试安装了2台国家智能交通系统工程技术研究中心研制的微波交通流检测器,用以检测高速公路车微波交通流检测器,用以检测高速公路主干道的车流量信息。经过1个月左右的时间进行测试,设备可以稳定运行。 2.1微波检测器简介 本次所安装的微波式交通检测器是一种用于监测交通状况的检测器。它通过发射低能量的连续频率调制微波信号,处理回波信号,可以检测出多达8个车道的车流量、道路占有率、平均车速、长车流量等交