6机械的平衡答案
第六章 机械的平衡答案
一、填空题:
1.研究机械平衡的目的是部分或完全消除构件在运动时所产生的 惯性力和惯性力偶矩 ,减少或消除在机构各运动副中所引起的 附加动压 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
2.回转构件的直径D 和轴向宽度b 之比/D b 符合5≤条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
3.只使刚性转子的 惯性力 得到平衡称静平衡,此时只需在 1个 平衡平面中增减平衡质量;使 惯性力和惯性力偶矩 同时达到平衡称动平衡,此时至少要在 2 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
4. 刚性转子静平衡的力学条件是 质径积向量和等于零 ,而动平衡的力学条件是 质径积向量和等于零,离心力引起的合力矩等于零 。
5.符合静平衡条件的回转构件,其质心位置在 回转轴线上 。静不平衡的回转构件,由于重力矩的作用,必定在 质心最低处 位置静止,由此可确定应加上或去除平衡质量的方向。
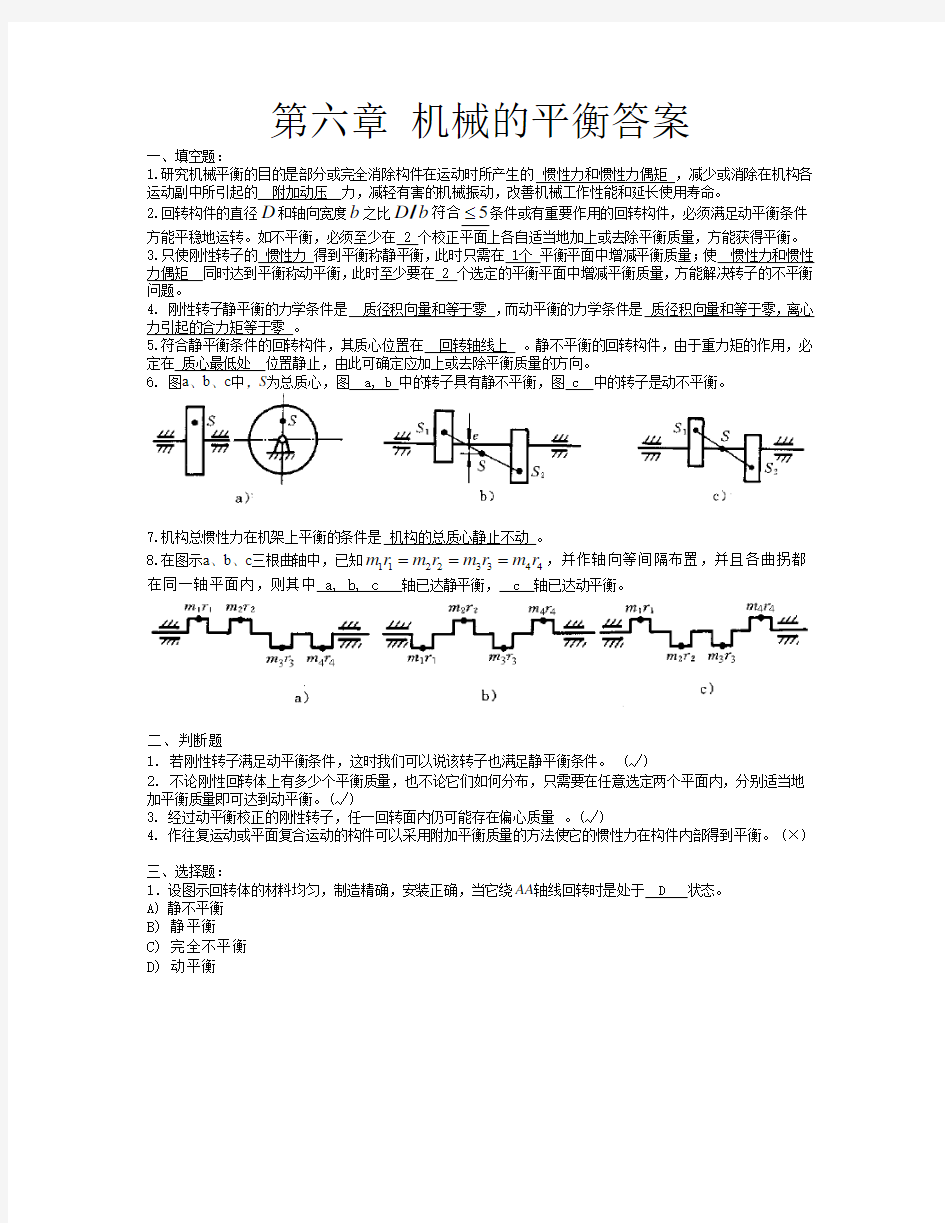
6. 图a 、b 、c 中,S 为总质心,图 a, b 中的转子具有静不平衡,图 c 中的转子是动不平衡。
7.机构总惯性力在机架上平衡的条件是 机构的总质心静止不动 。 8.在图示a 、b 、c 三根曲轴中,已知11
223344m r m r m r m r ===,并作轴向等间隔布置,并且各曲拐都
在同一轴平面内,则其中 a, b, c 轴已达静平衡, c 轴已达动平衡。
二、判断题
1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。 (√)
2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地
加平衡质量即可达到动平衡。(√)
3. 经过动平衡校正的刚性转子,任一回转面内仍可能存在偏心质量 。(√)
4. 作往复运动或平面复合运动的构件可以采用附加平衡质量的方法使它的惯性力在构件内部得到平衡。(×)
三、选择题:
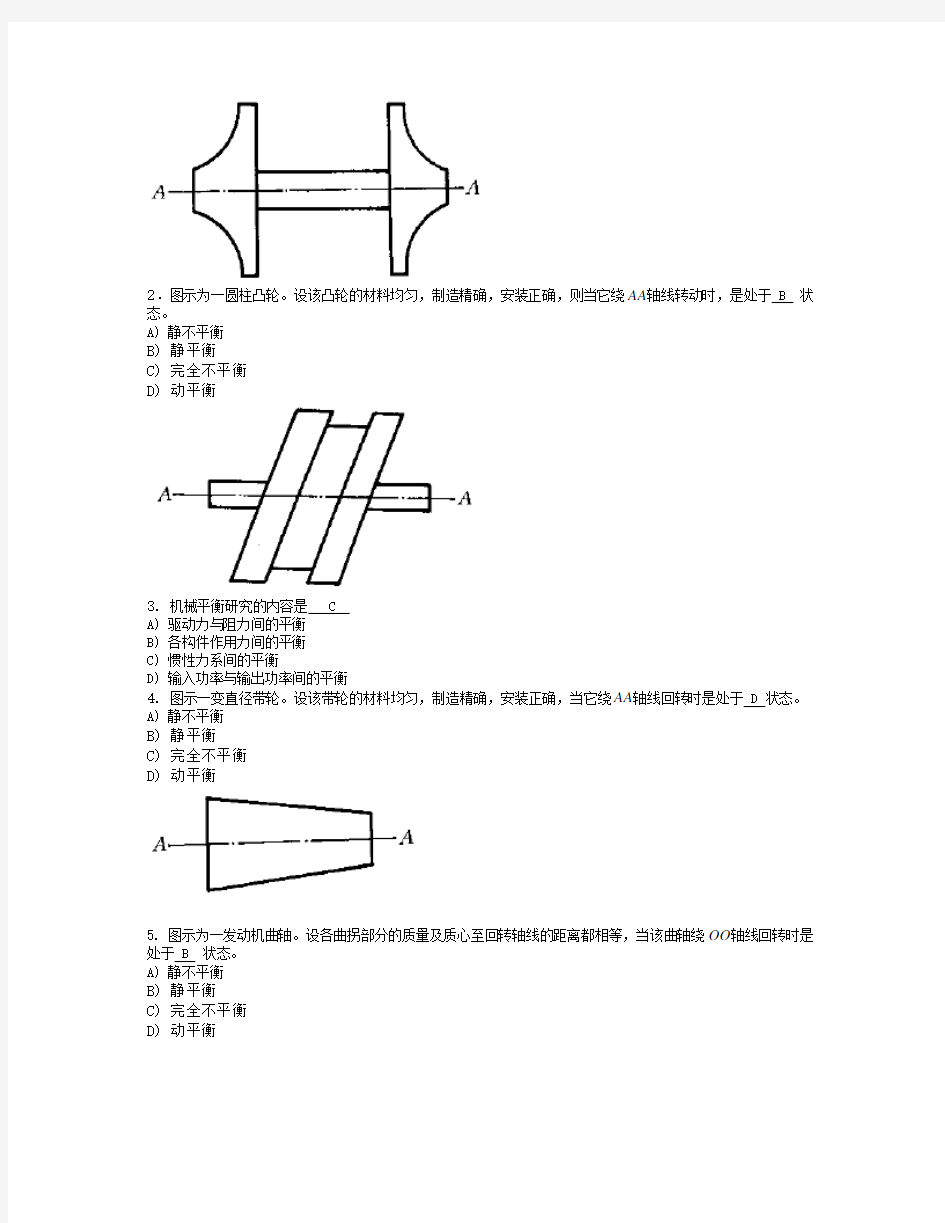
1.设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 D 状态。 A) 静不平衡
B) 静平衡 C) 完全不平衡 D) 动平衡
2.图示为一圆柱凸轮。设该凸轮的材料均匀,制造精确,安装正确,则当它绕AA轴线转动时,是处于 B 状态。
A)静不平衡
B) 静平衡
C) 完全不平衡
D) 动平衡
3.机械平衡研究的内容是 C
A) 驱动力与阻力间的平衡
B) 各构件作用力间的平衡
C) 惯性力系间的平衡
D) 输入功率与输出功率间的平衡
4.图示一变直径带轮。设该带轮的材料均匀,制造精确,安装正确,当它绕AA轴线回转时是处于 D 状态。
A)静不平衡
B) 静平衡
C) 完全不平衡
D) 动平衡
5. 图示为一发动机曲轴。设各曲拐部分的质量及质心至回转轴线的距离都相等,当该曲轴绕OO轴线回转时是处于 B 状态。
A)静不平衡
B) 静平衡
C) 完全不平衡
D) 动平衡
7. 为了平衡曲柄滑块机构ABC 中滑块C 的往复惯性力(曲柄和连杆质量不计),在原机构上附加一对称滑块机构
''AB C 。设滑块C 和'C 质量相等,'AB AB l l =,''BC B C l l =,机构在运转时能达到 B 。
A) 惯性力全部平衡,且不产生附加惯性力偶矩。
B) 惯性力全部平衡,但产生附加惯性力偶矩。 C) 惯性力部分平衡,且不产生附加惯性力偶矩。 D) 惯性力部分平衡,但产生附加惯性力偶矩。
四、计算题
1. 图示两个回转构件是否符合静平衡条件?是否符合动平衡条件?为什么?442
对a
3042060i i
m r =?-?=∑
∴处于静平衡状态
对b ,10104154100i i m r =?-?-?=∑,∴处于静平衡状态
将2m 分解到1,3平面内
122121818()m m += ∴126m =
312224
m m m =-=在平面1中,
6104150i i
m r =?-?=∑
在平面3中
4104100i i
m r =?-?=∑
所以,图b 处于动平衡状态
2.图示为绕O 点回转的薄片圆盘,在位置1、2处钻孔, 101m .r =,202m .r =,孔部分材料质量分别
为110kg .m =,205kg .m =。为进行静平衡,欲在半径05m .b r =的圆周上钻一孔。试表示出孔的 方向b θ,并求出钻去材料的质量b m 。
3.图示为一鼓轮,上有重块A 、B ,已知它们的质量A 4kg m =,B 2kg m =,今欲在平面Ⅰ、Ⅱ上分别
加一平衡质量b 'm 和b ''m ,它们分布在1200mm φ的圆周上,使鼓轮达到完全平衡。试求b 'm 和b ''m 的
大小,并在图中画出它的安放位置。
将不平衡质量A m 、B m 分解至I ,II 平面内,因为A m 位于平面I 内,不用分解,所以只需要分解B m
2601200260()I B B m m ?=?-
∴723kg .I
B
m = 7232923kg ..II I
B B B m m m =+=+= 在平面I 内,
由0i i m r =∑得
600I b m ?=
723kg .I
b m ∴=
设与竖直方向的夹角为I
b θ,则
5007235006004600
.tan I
I B b
A m m θ??==
??,564.I
b θ∴=? 1122100101kg m 050201kg m
......m r m r =?=?=?=?
由静平衡条件:
11220b b m r m r m r ++=
得01kg m .b b m r =?,方向如图所示。 所以钻孔的质量为010502kg .
/..b m ==
在平面II 内
由
0i i
m r =∑得
500600II II B b m m ?=?
769kg .II b m ∴=
方向如图所示。
4.某转子由两个互相错开0
90的偏心轮组成,每一偏心轮的质量均为m ,偏心距均为r ,拟在平衡平
面A 、B 上半径为2r 处添加平衡质量,使其满足动平衡条件,试求平衡质量()b A m 和()b B m 的大小和
方向。
机械原理基本概念
(2)运动副是两构件通过直接接触形成的可动联接。(3)两构件通过点或线接触形成的联接称为高副。一个平面高副所引入的约束数为1。(4)两构件通过面接触形成的联接称为高副,一个平面低副所引入的约束数为2。(5)机构能实现确定相对运动的条件是原动件数等于机构的自由度,且自由度大于零。(6)虚约束是对机构运动不起实际约束作用的约束,或是对机构运动起重复约束作用的约束。(7)局部自由度是对机构其它运动构件的运动不产生影响的局部运动。(8)平面机构组成原理:任何机构均可看作是由若干基本杆组依次联接于原动件和机架上而构成。(8)基本杆组的自由度为0。(1)瞬心是两构件上瞬时速度相等的重合点-------即等速重合点。(2)两构件在绝对瞬心处的速度为0。(3)相构件在其相对瞬心处的速度必然相等。(4)两构件中若有一个构件为机架,则它们在瞬心处的速度必须为0。(5)用瞬心法只能求解机构的速度,无法求解机构的加速度。(1)驱动机械运动的力称为驱动力,驱动力对机械做正功。(2)阻止机械运动的力称为阻抗力,阻抗力对机械做负功。(1)机械的输出功与输入功之比称为机械效率。(2)机构的损失功与输入功之比称为损失率。(3)机械效率等于理想驱动力与实际驱动力的比值。(4)平面移动副发生自锁条件:作用于滑块上的驱动力作用在其摩擦角之内。(5)转动副发生自锁的条件:作用于轴颈上的驱动力为单力,且作用于轴颈的摩擦圆之内。(1)机构平衡的目的:消除或减少构件不平衡惯性力所带来的不良影响。(2)刚性转子总可通过在转子上增加或除去质量的办法来实现其平衡。(3)转子静平衡条件:转子上各偏心质量产生的离心惯性力的矢量和为零(或质径积矢量和为零)。(4)对于静不平衡转子只需在同一个平面内增加或除去平衡质量即可获得平衡,故称为单面平衡。(5)对于宽径比b/D<0.2的不平衡转子,只做静平衡处理。(6)转子动平衡条件:转子上各偏心质量产生的离心惯性力的矢量和为零,以及这些惯性力所构成的力矩矢量的和也为零。(7)实现动平衡时需在两个平衡基面增加或去除平衡质量,故动平衡又称为双面平衡。(8)动平衡的转子一定是静平衡的,反之则不然。(9)转的许用不平衡量有两种表示方法:许用质径积+许用偏心距。(1)机械运转的三阶段:启动阶段、稳定运转阶段、停车阶段。(2)建立机械系统等动力学模型的等效条件:瞬时动能等效、外力做功等效。(3)机器的速度波动分为:周期性速度波动和非周期性速度波动。(4)周期性速度波动的调节方法:安装飞轮。(5)非周期性速度波动的调节方法:安装调速器。(6)表征机械速度波动程度的参量是:速度不均匀系数δ。(8)飞轮调速利用了飞轮的储能原理。(9)飞轮宜优先安装在高速轴上。(10)机械在安装飞轮后的机械仍有速度波动,只是波动程度有所减小。(1)铰链四杆机构是平面四杆机构的基本型式。(2)铰链四杆机构的三种表现形式:曲柄摇杆机构、双曲柄机构、双摇杆机构。(3)曲柄摇杆机构的功能:将曲柄的整周转动变换为摇杆的摆动或将摇杆的摆动变换为曲柄的回转。(4)曲柄滑动机构的功能:将回转运动变换为直线运动(或反之)。(5)铰链四杆机构存在曲柄的条件:最短杆与最长杆长度之和小于等于其它两杆长度之和;最短杆为连架杆或机架。(6)铰链四杆机构成为曲柄摇杆机构的条件:最短杆与最长杆长度之和小于等于其它两杆长度之和;最短杆为连架杆。(7)铰链四杆机构成为曲柄摇杆机构的条件:最短杆与最长杆长度之和小于等于其它两杆长度之和;最短杆为机架。(8)铰链四杆机构成为又摇杆机构的条件:不满足杆长条件;或者是满足杆长条件但最短杆为连杆。(9)曲柄滑块机构存在曲柄的条件是:曲柄长度r+偏距r小于等于连杆长度l(12)曲柄摇杆机构以曲柄为原动件时,具有急回性质。(13)曲柄摇杆机构以曲柄为主动件,当曲柄与连杆共线时,机构处于极限位置。(14)曲柄滑块机构以曲柄为主动件,当曲柄与连杆共线时,机构处于极限位置。(15)偏置曲柄滑块机构以曲柄为原动件时,具有急回性质。(16)对心曲柄滑块机构不具有急回特性。(17)曲柄导杆机构以曲柄为原动件时,具有具有急回性质。(18)连杆机构的传动角越大,对传动越有利。(19)连杆机构的压力角越大,对传动越不利。(20)导杆机构的传动角恒为90o。21)曲柄摇杆机构以曲柄为主动杆时,最小传动角出现在曲柄与机架共线的两位置之一。(22)曲柄摇杆机构以摇杆为主动件,当从动曲柄与连杆共线时,机构处于死点位置。(23)当连杆机构处于死点时,机构的传动角为0。(1)凸轮机构的优点是:只要适当地设计出凸轮轮廓曲线,就可使打推杆得到各种运动规律。(2)凸轮机构的缺点:凸轮轮廓曲线与推杆间为点、线接触,易磨损。(3)常用的推杆运动规律:等速运动规律、等加速等减速运动规律、余弦加速度运动规律、正弦加速度运动规律、五次多项式运动规律。(4)采用等速运动规律会给机构带来刚性冲击,只能用于低速轻载。(5)采用等加速等减速运动规律会给机构带来柔性冲击,常用于中速轻载场合。(6)采用余弦加速度运动规律也会给机构带来柔性冲击,常用于中低速重载场合。(7)余弦加速度运动规律无冲击,适于中高速轻载。(8)五次多项式运动规律无冲击,适于高速中载。(9)增大基圆半径,则凸轮机构的压力角减少。(10)对凸轮机构进行正偏置,可降低机构的推程压力角。(11)设计滚子推杆盘形凸轮机构时,对于外凸的凸轮廓线段,若滚子半径大于理论廓线上的最小曲率半径,将使工作廓线出现交叉,从而使机构出现运动失真现象。(12)设计滚子推杆盘形凸轮机构时,对于外凸的凸轮廓线段,若滚子半径等于理论廓线上的最小曲率半径,将使凸轮廓线出现变尖现象。(1)圆锥齿轮机构可实现轴线相交的两轴之间的运动和动力传递。(2)蜗
第六章 机械的平衡习题与答案
第六章机械的平衡 1 机械平衡分为哪几类? 2何谓刚性转子与挠性转子? 3 对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡? 4 机械的平衡包括哪两种方法?它们的目的各是什么? 5 刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么? 6 经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么? 7机械平衡的目的? 8什么叫静平衡? 9什么叫动平衡? 10 动静平衡各需几个平衡基面? 11刚性转子静平衡的力学条件是;动平衡的力学条件是。 12下图所示的两个转子,已知m1r1=m2r2,转子(a)是_____不平衡的;转子(b)是_____不平衡的。 13下图(a)、(b)、(c)中,s为总质心,图______中的转子具有静不平衡;图______中的转子具有动不平衡。 14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对的平衡。 15机构总惯性力在机架上平衡的条件是平面机构总质心。 16研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。 17对于绕固定轴回转的构件,可以采用的方法,使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。若机构中存在作往复运动或平面复合运动的构件,应采用方法,方能使作用在机架上的总惯性力得到平衡。 18动平衡的刚性回转构件静平衡的。 19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称为。 20如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该
机械原理题库第九章机械的平衡
02401、研究机械平衡的目的是部分或完全消除构件在运动时所产生的 ,减少或消除在机构各运动副中所引起的 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。 02402、回转构件的直径D 和轴向宽度b 之比b D 符合 条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。如不平衡,必须至少在 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。 02403、只使刚性转子的 得到平衡称静平衡,此时只需在 平衡平面中增减平衡质量;使 同时达到平衡称动平衡,此时至少要在 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。 02404、刚性转子静平衡的力学条件是 ,而动平衡的 力学条件 是 。 02405、图示两个转子,已知2211r m r m ,转子a 是 不平衡的,转子b 是 不平衡的。 a)b) 02406、符合静平衡条件的回转构件,其质心位置 在 。静不平衡的回转构件,由于重力矩的作用,必定在 位置静止,由此可确定应加上或去除平衡质量的方向。 02407、回转构件的直径D 和轴向宽度b 之比b D 符合 条件的回转构件,只需满 足静平衡条件就能平稳地回转。如不平衡,可在 个校正平面上适当地加上或去除平衡质量就能获得平衡。
02408、图a 、b 、c 中,S 为总质心,图 中的转子具有静不平衡,图 中的转子是动不平衡。 02409、当回转构件的转速较低,不超过 范围,回转构件可以看作刚性物体,这类平衡称为刚性回转件的平衡。随着转速上升并超越上述范围,回转构件出现明显变形,这类回转件的平衡问题称为 回转件的平衡。 02410、机构总惯性力在机架上平衡的条件是 。 02411、在图示a 、b 、c 三根曲轴中,已知44332211r m r m r m r m ===,并作轴向等间隔布置,且都在曲轴的同一含轴平面内,则其中 轴已达静平衡, 轴已达动平衡。 02412 、 连 杆 机 构 总 惯 性 力 平 衡 的 条 件 是 ,它可以采用附加平衡质量或者附加 等方法来达到。 02413、对于绕固定轴回转的构件,可以采用 的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。若机构中存 在作往复运动或平面复合运动的构件应采用 方法,方能使作用于机架上的总惯性力得到平衡。 02414、若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。( ) 02415、不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只
第六章机械的平衡
第六章机械的平衡 1.简答题: (1)简述机械中不平衡惯性力的危害与利用。 (2)机械的平衡和调速都可以减轻机械中的动载荷,但两者有何本质的区别? (3)为什么绕定轴作等速转动的转子也要进行平衡? (4)什么是平面机构的部分平衡法?为什么要这样处理? (5)研究机械平衡的目的是什么? (6)何谓静平衡?何谓动平衡?各需要几个平衡基面? (7)刚性转子静平衡和动平衡的力学条件是什么? (8)对平面四杆机构进行平衡的基本原理和基本方法是什么? (9)工程上为什么要规定许用不平衡量?为什么说完全的绝对平衡是不可能也是不必要的? (10)机构总惯性力在机架上平衡的条件是什么? 2.在图10.3所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?位什么? 3.其转子由两个互相错开90°的偏心轮组成,每一偏心轮的质量均为m,偏心距均为r,在平衡平面A,B上半径为2r处添加平衡质量,使其满足动平衡条件。 试求平衡质量(m b)A和(m b)B的大小和方位。 4.高速水泵的凸轮轴系由三个互相错开120°的偏心轮组成,每一偏心轮的质量为m,其偏心距为r,设在平衡平面A和B上各安装一个平衡质量m A和m B,其
回转半径为2r,其它尺寸如图10.5所示。试求m A和m B的大小和方位(可用图解法)。 5.图10.6所示为一刚质圆盘。盘厚δ=20mm,在向径r1=100mm处有一直径d=50mm 的通孔,向径r2=200mm处有一重量为2N的重块,为使圆盘满足静平衡条件,拟在向径r=200mm的圆周上再钻一通孔,试求此通孔的直径和方位(刚的重度γ=7.6x10-5N/mm2)。
机械原理与人体平衡知识分析报告
机械原理与人体平衡知识分析 -----------------------作者:-----------------------日期:
三:综合训练 一:填空题: 1、一长直扁担长1.5m,前端挂200N的货,后端挂300N的货,则肩膀应该位于离扁担前端________m处,才能使扁担平衡,平衡后肩受到的压力为________N.(不计扁担的重力) 2、如图所示,用滑轮组匀速提升物体A时,测力计的示数为 N,如果不计滑轮重 和摩擦,物体A的重力为 N。 3.在图1所示的两种常用工具中,属于省力杠杆的是 (选填“甲”或“乙”).使用这两种工具都省功(选填“能”或“不能”). 4、如图所示,杠杆AC(刻度均匀,不计杠杆重)可绕支点O自由转动,在B点挂一重为G 的物体。为使杠杆平衡,应在杠杆上的_________点施加一个作用力,才能使作用力最小,该最小作用力与物重G的比值是___________。 5、如图2所示,物体 A 和 B 的质量相等(滑轮重力不计),当分别用力匀速提升物体A和B时,F A︰F B= 。 图1
6、钓鱼时,钓鱼竿可看成一根杠杆,如图3,它是一个________杠杆,其支点位于图中的________点.要使钓起鱼时省力一些,则钓鱼者两只手之间的距离应________一些(填增大或减小). 7、如图4,利用定滑轮匀速提升重物G ,需要拉力F 或'F ,F 和'F 大小的关系是F 'F 。(填大于、小于、等于) 8、 一辆汽车不小心陷入了泥潭中,司机按图5所示的甲乙两种方式可将汽车从泥潭中拉出,其中省力的是 图。 9、如图6所示,动滑轮重为50N ,绳重和摩擦不计,人对绳子的拉力是 260N ,则物体的重是 N ;若重物上升的高度是0.2m ,则绳子自由端 下降 m 。 10.如图7,每个钩码重0.49N,杠杆上每格长度相等,现用一弹簧测力计要求钩在支点右侧,使它的示数为0.98N,且杠杆在水平位置保持平衡,则弹簧测力计应钩在 点 图3 图4 图6
6机械的平衡答案
第六章 机械的平衡答案 一、填空题: 1.研究机械平衡的目的是部分或完全消除构件在运动时所产生的 惯性力和惯性力偶矩 ,减少或消除在机构各运动副中所引起的 附加动压 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。 2.回转构件的直径D 和轴向宽度b 之比/D b 符合5≤条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。 3.只使刚性转子的 惯性力 得到平衡称静平衡,此时只需在 1个 平衡平面中增减平衡质量;使 惯性力和惯性力偶矩 同时达到平衡称动平衡,此时至少要在 2 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。 4. 刚性转子静平衡的力学条件是 质径积向量和等于零 ,而动平衡的力学条件是 质径积向量和等于零,离心力引起的合力矩等于零 。 5.符合静平衡条件的回转构件,其质心位置在 回转轴线上 。静不平衡的回转构件,由于重力矩的作用,必定在 质心最低处 位置静止,由此可确定应加上或去除平衡质量的方向。 6. 图a 、b 、c 中,S 为总质心,图 a, b 中的转子具有静不平衡,图 c 中的转子是动不平衡。 7.机构总惯性力在机架上平衡的条件是 机构的总质心静止不动 。 8.在图示a 、b 、c 三根曲轴中,已知11 223344m r m r m r m r ===,并作轴向等间隔布置,并且各曲拐都 在同一轴平面内,则其中 a, b, c 轴已达静平衡, c 轴已达动平衡。 二、判断题 1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。 (√) 2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地 加平衡质量即可达到动平衡。(√) 3. 经过动平衡校正的刚性转子,任一回转面内仍可能存在偏心质量 。(√) 4. 作往复运动或平面复合运动的构件可以采用附加平衡质量的方法使它的惯性力在构件内部得到平衡。(×) 三、选择题: 1.设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 D 状态。 A) 静不平衡 B) 静平衡 C) 完全不平衡 D) 动平衡
机械原理习题-(附答案)
第二章 一、单项选择题: 1.两构件组成运动副的必备条件是。 A.直接接触且具有相对运动;B.直接接触但无相对运动; C.不接触但有相对运动;D.不接触也无相对运动。 2.当机构的原动件数目小于或大于其自由度数时,该机构将确定的运动。 A.有;B.没有;C.不一定 3.在机构中,某些不影响机构运动传递的重复部分所带入的约束为。 A.虚约束;B.局部自由度;C.复合铰链 4.用一个平面低副联二个做平面运动的构件所形成的运动链共有个自由度。 A.3;B.4;C.5;D.6 5.杆组是自由度等于的运动链。 A.0;B.1;C.原动件数 6.平面运动副所提供的约束为 A.1;B.2;C.3;D.1或2 7.某机构为Ⅲ级机构,那么该机构应满足的必要充分条件是。 A.含有一个原动件组;B.至少含有一个基本杆组; C.至少含有一个Ⅱ级杆组;D.至少含有一个Ⅲ级杆组。 8.机构中只有一个。 A.闭式运动链;B.原动件;C.从动件;D.机架。 9.要使机构具有确定的相对运动,其条件是。 A.机构的自由度等于1;B.机构的自由度数比原动件数多1; C.机构的自由度数等于原动件数 二、填空题: 1.平面运动副的最大约束数为_____,最小约束数为______。 2.平面机构中若引入一个高副将带入_______个约束,而引入一个低副将带入_____个约束。3.两个做平面平行运动的构件之间为_______接触的运动副称为低副,它有_______个约束;而为_______接触的运动副为高副,它有_______个约束。 4.在平面机构中,具有两个约束的运动副是_______副或_______副;具有一个约束的运动副是_______副。 5.组成机构的要素是构件和运动副;构件是机构中的__运动___单元体。 6.在平面机构中,一个运动副引入的约束数的变化范围是_______。 7.机构具有确定运动的条件是____________________________________________。 8.零件与构件的区别在于构件是的单元体,而零件是的单元体。 9.由M个构件组成的复合铰链应包括个转动副。 10.机构中的运动副是指两构件直接接触而形成的可动联接 判断题: 1.机构的自由度一定是大于或等于1。 2.虚约束是指机构中某些对机构的运动无约束作用的约束。在大多数情况下虚约束用来改善机构的受力状况。 3.局部自由度是指在有些机构中某些构件所产生的、不影响机构其他构件运动的局部运动的自
第六章机械的平衡要点
第六章机械的平衡 1机械平衡分为哪几类? 2何谓刚性转子与挠性转子? 3对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡? 4机械的平衡包括哪两种方法?它们的目的各是什么? 5刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么? 6经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么? 7机械平衡的目的? 8什么叫静平衡? 9什么叫动平衡? 10动静平衡各需几个平衡基面? 11刚性转子静平衡的力学条件是 __________________ ;动平衡的力学条件是 ___________________ 。 12下图所示的两个转子,已知 m 1「1=m 2r 2,转子(a )是 __ 不平衡的;转子(b )是 _____ 不平衡的 a ) b ) c ) 14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对 _______________ 的平衡。 15机构总惯性力在机架上平衡的条件是平面机构总质心 。 16研究机械平衡的目的是部分或完全消除构件在运动时所产生的 ____________________ ,减少或消 除在机构各运动副中所引起的 _____________________ 力,减轻有害的机械振动, 改善机械工作 性能和延长使用寿命。 17对于绕固定轴回转的构件,可以采用 的方法,使构件上所有质量的惯 性力形成平衡力系,达到回转构件的平衡。若机构中存在作往复运动或平面复合运动的构件, 应采用 ______________________ 方法,方能使作用在机架上的总惯性力得到平衡。 18动平衡的刚性回转构件 静平衡的。 19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称 为 。 20 如图所示曲轴上,四个曲拐位于同一平面内,若质径积 m 1r 1=m 2r 2=m 3r 3=m 4「4,l 1=l 2=l 3,试判断该 13下图(a )、(b )、(c )中,s 为总质心,图 _ 中的转子具有静不平衡;图 ________ 中的转子具有 动不平衡。
机械原理-机械的平衡
第四讲 机械的平衡 一、刚性转子的静平衡计算 (1)静不平衡转子: 对于轴向尺寸较小的盘状转子(即轴向宽度b 与其直径D 之比b /D < 0.2的转子),其质量可以近似认为分布在垂直于其回转轴线的同一平面内。若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子 (2)静平衡及其条件: 对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。 静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。静平衡条件表达: 形式一: 力条件: =+=∑∑b Ii F F F 形式二:质径积条件: =+∑b b i i r m r m (3)静平衡的计算: 即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。对于静不平衡的转子,无论有多少个偏心质量,只需进行单面平衡。 例1 图示盘形回转件上存在三个偏置质量,已知m 110= kg ,m 215= kg ,m 310= kg ,r 150= mm ,r 2100= mm ,r 370= mm ,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡? 解: 111050500 kg mm m r =?=? 22151001500 kg mm m r =?=? 331070700 kg mm m r =?=? 1r 与3r 共线,可代数相加得 3311700500200 kg mm m r m r -=-=? 方向同3r r 平衡条件:b b 1122330m r m r m r m r +++=r r r r 所以依次作矢量()331122,m r m r m r +r r r ,封闭矢量b b m r r 即所求,如图示。 22b b 20015001513.275 kg mm m r =+=? 0200 270arctg 277.5951500 θ=+=?
第六章机械的平衡答案
第六章 机械的平衡答案 浙工大机械原理习题卡 一、填空题: 1.研究机械平衡的目的是部分或完全消除构件在运动时所产生的 惯性力和惯性力偶矩 ,减少或消除在机构各运动副中所引起的 附加动压 力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。 2.回转构件的直径D 和轴向宽度b 之比/D b 符合5≤条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。 3.只使刚性转子的 惯性力 得到平衡称静平衡,此时只需在 1个 平衡平面中增减平衡质量;使 惯性力和惯性力偶矩 同时达到平衡称动平衡,此时至少要在 2 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。 4. 刚性转子静平衡的力学条件是 质径积向量和等于零 ,而动平衡的力学条件是 质径积向量和等于零,离心力引起的合力矩等于零 。 5.符合静平衡条件的回转构件,其质心位置在 回转轴线上 。静不平衡的回转构件,由于重力矩的作用,必定在 质心最低处 位置静止,由此可确定应加上或去除平衡质量的方向。 6. 图a 、b 、c 中,S 为总质心,图 a, b 中的转子具有静不平衡,图 c 中的转子是动不平衡。 7.机构总惯性力在机架上平衡的条件是 机构的总质心静止不动 。 8.在图示a 、b 、c 三根曲轴中,已知11 223344m r m r m r m r ===,并作轴向等间隔布置,并且各曲拐都 在同一轴平面内,则其中 a, b, c 轴已达静平衡, c 轴已达动平衡。 二、判断题 1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。 (√) 2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地 加平衡质量即可达到动平衡。(√) 3. 经过动平衡校正的刚性转子,任一回转面内仍可能存在偏心质量 。(√) 4. 作往复运动或平面复合运动的构件可以采用附加平衡质量的方法使它的惯性力在构件内部得到平衡。(×) 三、选择题: 1.设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 D 状态。 A) 静不平衡 B) 静平衡 C) 完全不平衡 D) 动平衡
第6章 机械平衡(有答案)
§6 机械平衡 填空题: 1.回转构件的直径D和轴向宽度b之比/ D b符合 <=5 条件或有重要作用的 回转构件,必须满足动平衡条件方能平稳地运转。如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。 2.只使刚性转子的惯性力得到平衡称静平衡,此时只需在 1个平衡平面中增 减平衡质量;使惯性力和惯性力偶矩同时达到平衡称动平衡,此时至少要在 2个个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。 3.刚性转子静平衡的力学条件是各偏心质量的惯性力的合力为零,而 动平衡的力学条件是各偏心质量的惯性力的合力和惯性力偶矩均为零。 4.图a、b、c中,S为总质心,图 a、b 中的转子具有静不平衡,图 c 中 的转子是动不平衡。 ,转子a是静不平衡的,转子b是动不平衡的。 5.图示两个转子,已知m r m r 1122 a) b) 选择题: 1.设图示回转体的材料均匀,制造精确,安装正确,当它绕 AA轴线回转时是处于 D 状态。 A)静不平衡B)静平衡 C)完全不平衡D)动平衡
2. 图示为一圆柱凸轮。设该凸轮的材料均匀,制造精确,安装正确,则当它绕AA 轴线转 动时,是处于 B 状态。 A)静不平衡 B)静平衡 C)完全不平衡 D)动平衡 3. 图示一变直径带轮。设该带轮的材料均匀,制造精确,安 装正确,当它绕AA 轴线回转时是处于 D 状态。 A)静不平衡 B)静平衡 C)完全不平衡 D)动平衡 判断题: 1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。(√ ) 2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个 平面内,分别适当地加平衡质量即可达到动平衡。(√ ) 综合题1: 图示为绕O 点回转的薄片圆盘,在位置1、2处钻孔,101m .r =,202m .r =,孔部分材料质量分别为110kg .m =,205kg .m =。为进行静平衡,欲在半径05m .b r =的圆周上钻一孔。试表示出孔的 方向b θ,并求出钻去材料的质量b m 。 解: 1122100101kg m 050201kg m ......m r m r =?=?=?=? 由静平衡条件: 11220b b m r m r m r ++= 得01kg m .b b m r =?,方向如图所示。 所以钻孔的质量为010502kg ./..b m ==
机械原理部分答案
2.2.1在平面机构中,两构件之间以线接触所组成的平面运动副,称为高副,它引入1个约束,保留了 2个自由度。 222平面运动副的最大约束数为 2,最小约束数为1;引入一个约束的运动副为一级副,引入两个约束的运动副为二级副。 2.2.3构成机构的要素是构件和运动副;构件是机构中独立运动的单元体。 2.2.4在平面机构中,一个运动副引入约束的变化范围是 1 — 2。 2.2.5以下几种常见的运动副中,其中(C)是高副。 A ?滑动轴承B。移动副C o齿轮副D。螺旋副 2.2.6运动副中,凡是以点或线接触的,称为高副,而低副则是以面接触的。 2.2.7构件是机械中独立的制造单元。(错) 2.2.8 B是构成机械的最小单元,也是制造机械时的最小单元 A. 机器 B.零件 C.构件 D.机构 2.2.9两构件组成运动副的必要条件是两构件(A) A.直接接触且具有相对运动 B。直接接触但无相对运动 C.虽然不接触但有相对运动 D.既不接触也无相对运动 2.2.10平面高副连接的两个构件间,只允许有相对滑动。(错) 2.2.11用平面低副连接的两构件间,具有相对运动的数目是 3 ? 2.2.12具有一个自由度的运动副称为I级副。(错) 2.2.13何为运动副?按接触形式分为几种?其自由度、约束数如何? 答案:由两构件直接接触而组成的可动的连接;可分为高副和低副; 2.3机构自由度的计算 2.31机构组成原理是什么?答案:任何机构都是可以看作是由若干个基本杆组依次连接于原动件和机架上构成的。 2.3.2机构具有确定运动的条件是?答案:原动件的数目应等于该机构的自由度的数目 2.3.3计算机构自由度时,若记入虚约束,则机构自由度的数目将( C) A.增大 B.不变 C.减少 D.以上都有可能 2.3.4机构中原动件数应等于机构的自由度数(对) 2.3.5机构的自由度就是构件的自由度(错) 2.3.6既然虚约束对机构的运动实际上不起约束作用,为什么在实际机械中又常常存在虚约束?答案:为了保证连杆运动的连续性 2.3.7只有自由度为1的机构才具有确定的运动(对) 2.3.8由M个构件组成的复合铰链应包括(M-1 )个运动副 2.3.9门与门框通常有两个以上的铰链,这是复合铰链的典型例子。(错) 第3章平面机构的运动分析 3.1.1某机构有6个构件,该机构的全部瞬心数目是(15)个 3.1.2两构件构成咼副时,其瞬心一定在接触点上。(错) 3.1.3速度瞬心可以定义为互相做平面相对运动的两构件上瞬时速度相等的点 3.1.4速度瞬心是两构件上瞬时相对速度为(相等),瞬时绝对速度(为0)的重合点 3.1.5平面五杆机构共有(10)个速度瞬心,其中()个是绝对瞬心 3.1.6速度瞬心是构件上速度为零的点。(错) 3.1.7下列说法正确的是B A. 在机构中,某一瞬时,两构件上的重合点的速度大小相同,则该点为两构件的瞬心。 B. 在机构中,某一瞬时,一可动构件上的某点的速度为零,则该点为可动构件与机架的瞬心 C. 在机构中,某一瞬时,两可动构件上的重合点的速度相同,则该点称为它们的绝对瞬心。 D. 两构件构成高副,则它们的瞬心一定在接触点上。 3.1.8相对瞬心和绝对瞬心的相同点是(速度相同),不同点是(绝对瞬心的速度为0,而相对不一
【免费下载】第六章机械的平衡答案
6. 图a 、b 、c 中,S 为总质心,图 a, b 中的转子具有静不平衡,图 c 中的转子是动不平衡。 7.机构总惯性力在机架上平衡的条件是 机构的总质心静止不动 。在同一轴平面内,则其中 a, b, c 轴已达静平衡, c 轴已达动平衡。问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现、电气资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装
2.图示为一圆柱凸轮。设该凸轮的材料均匀,制造精确,安装正确,则当它绕D) 动平衡 3. D) 动平衡、管路敷设技术术中包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。气课件中调试料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料高中资料试卷技术,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。
第6章 机械的平衡习题解答
第六章 机械的平衡 本章知识要点归纳与总结 1.机械平衡的目的 (1)设法将构件的不平衡惯性力加以平衡以消除或减少其不良影响。 (2)机械平衡的内容 由于各构件的结构及运动形式的不同,其所产生的惯性力和平衡方法也不同,机械的平衡问题分为下述两类: 1) 绕固定轴回转的构件的惯性力平衡 可利用在构件上增加或除去一部分质量的方法予以平衡。 2) 机构的平衡 使各构件惯性力的合力和合力偶得到完全或部分平衡。 2.刚性转子的平衡计算 (2)刚性转子的平衡计算的步骤 1)静平衡计算 ①计算各偏心质量的质径积i i r m ②计算平衡质径积 i i i x b b r m r m αcos )(∑-= i i i y b b r m r m αs i n )(∑-= 大小 ])()[(2 2 y b b x b b b b r m r m r m += 相位角 ])()(a r c t a n [x b b y b b b r m r m =α 2) 动平衡计算
①选定两个回转平面I 及II 作为平衡基面。 ②将各离心惯性力分解到平衡基面I 和II 内。 ③在平衡基面I 及II 内按静平衡计算方法各加一平衡质量bI m 及bII m ,使两平衡基面内的惯性力 之和分别为零。 3.刚性转子的平衡实验 (1)静平衡实验 目的是使转子的质心落在其回转中心上。静平衡实验可借助于导轨式静平衡实验装置,反复增减 平衡质量以达到静平衡;也可借助于类似单摆的平衡设备,以迅速测出转子不平衡质径积的大小和方位。 (2)动平衡实验 目的是使转子获得满意的动平衡。动平衡实验借助于专用的动平衡机。 (3)现场平衡 对于尺寸很大的转子,除在制造间进行平衡,还需在现场通过直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。 4.转子的许用不平衡量 有两种表示方法,即质径积[mr ] 表示法和偏心距[e ]表示法,两者的关系为 m mr e ][][= 5.平面机构的平衡 (1)机构平衡的条件:机构的总惯性力I F 和总惯性力偶矩I M 分别为零,即 0,0==I I M F 不过,在计算中,总惯性力偶矩对基座的影响应当与外加的驱动力矩和阻抗力矩一并研究,但是 由于驱动力矩和阻抗力矩与机械的工况有关,单独平衡惯性力矩往往没有意义,故这里只讨论总惯性力的平衡问题。 (2)机构惯性力的两种平衡方法 1)完全平衡:是机构的总惯性力恒为零。可采取下述两种措施 ① 利用平衡机构平衡 ② 利用平衡质量平衡 2)部分平衡:只平衡掉机构总惯性力的一部分。可采取下述三种措施 ① 利用平衡机构平衡 ② 利用平衡质量平衡 ③ 利用弹簧平衡
第6章 机械的平衡习题解答
第六章 机械的平衡 本章知识要点归纳与总结 1.机械平衡的目的 (1)设法将构件的不平衡惯性力加以平衡以消除或减少其不良影响。 (2)机械平衡的内容 由于各构件的结构及运动形式的不同,其所产生的惯性力和平衡方法也不同,机械的平衡问题分为下述两类: 1) 绕固定轴回转的构件的惯性力平衡 可利用在构件上增加或除去一部分质量的方法予以平衡。 2) 机构的平衡 使各构件惯性力的合力和合力偶得到完全或部分平衡。 2.刚性转子的平衡计算 (1)静平衡和动平衡 1)静平衡计算 ①计算各偏心质量的质径积i i r m ②计算平衡质径积 i i i x b b r m r m αcos )(∑-= i i i y b b r m r m αsin )(∑-= 大小 ])()[(2 2 y b b x b b b b r m r m r m += 相位角 ])()(arctan[ x b b y b b b r m r m =α
2) 动平衡计算 ①选定两个回转平面I 及II 作为平衡基面。 ②将各离心惯性力分解到平衡基面I 和II 内。 ③在平衡基面I 及II 内按静平衡计算方法各加一平衡质量bI m 及bII m ,使两平衡基面内的惯性力 之和分别为零。 3.刚性转子的平衡实验 (1)静平衡实验 目的是使转子的质心落在其回转中心上。静平衡实验可借助于导轨式静平衡实验装置,反复增减 平衡质量以达到静平衡;也可借助于类似单摆的平衡设备,以迅速测出转子不平衡质径积的大小和方位。 (2)动平衡实验 目的是使转子获得满意的动平衡。动平衡实验借助于专用的动平衡机。 (3)现场平衡 对于尺寸很大的转子,除在制造间进行平衡,还需在现场通过直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。 4.转子的许用不平衡量 有两种表示方法,即质径积[mr ] 表示法和偏心距[e ]表示法,两者的关系为 m mr e ] [][= 5.平面机构的平衡 (1)机构平衡的条件:机构的总惯性力I F 和总惯性力偶矩I M 分别为零,即 0,0==I I M F 不过,在计算中,总惯性力偶矩对基座的影响应当与外加的驱动力矩和阻抗力矩一并研究,但 是 由于驱动力矩和阻抗力矩与机械的工况有关,单独平衡惯性力矩往往没有意义,故这里只讨论总惯性力的平衡问题。 (2)机构惯性力的两种平衡方法 1)完全平衡:是机构的总惯性力恒为零。可采取下述两种措施 ① 利用平衡机构平衡 ② 利用平衡质量平衡 2)部分平衡:只平衡掉机构总惯性力的一部分。可采取下述三种措施 ① 利用平衡机构平衡 ② 利用平衡质量平衡 ③ 利用弹簧平衡
机械原理-机械的平衡
机械原理-机械的平衡
第四讲 机械的平衡 一、 刚性转子的静平衡计 算 (1)静不平衡转子: 对于轴向尺寸较小的盘状转子(即轴向宽度 b 与其直径 D 之比b /D < 0.2的转子),其质量可以近似认为分布在垂直于其回转轴线的同一平面内。若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子 (2)静平衡及其条件: 对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。 静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。静平衡条件表达: 形式一: 力条件:0 =+=∑∑b Ii F F F 形式二:质径积条件:0 =+∑b b i i r m r m (3)静平衡的计算: 即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。对于静不平衡的转子,无论有多少个
偏心质量,只需进行单面平衡。 例1 图示盘形回转件上存在三个偏置质量,已知m 1 10= kg , m 215= kg ,m 310= kg ,r 1 50= mm ,r 2100= mm ,r 3 70= mm , 设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡? 解: 111050500 kg mm m r =?=? 22151001500 kg mm m r =?=? 331070700 kg mm m r =?=? 1 r 与3 r 共线,可代数相加得 3311700500200 kg mm m r m r -=-=? 方向同3 r r 平衡条件:b b 11 22 33 0m r m r m r m r +++=r r r r 所以依次作矢量()33 11 22 ,m r m r m r +r r r ,封闭矢量b b m r r 即所 求,如图示。 22b b 20015001513.275 kg mm m r =+=? 0200 270arctg 277.5951500 θ=+=?
最新机械原理知识点归纳总结
第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。 (3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解?4.“速度影像”和“加速度影像”的应用条件。