机器视觉中的摄像机定标方法综述
机器视觉中的摄像机定标方法综述
吴文琪,孙增圻
(清华大学计算机系智能技术与系统国家重点实验室,北京100084)
摘要:回顾了机器视觉中的各种摄像机定标方法,对各种方法进行介绍、分析,并提出了定标方法的发展方向的新思路。
关键词:机器视觉;摄像机定标;三维重建;镜头畸变
中国法分类号:TP387文献标识码:A文章编号:1001-3695(2004)02-0004-03
Overvie w of Camera Calibration Methods for Machine Vision
WU Wen-qi,SUN Zeng-qi
(State Key L aborato ry o f Intellige nt Tec hnology&Syste ms,Dept.o f Co mpute r Science&Technology,Tsinghua Universit y,Bei jing100084,China)
Abstract:In this paper,themethods for camera calibration are reviewed,anal yzed and compared.Furthermore,the develop ment of the camera calibration is discussed.
Key w ords:Machine Vision;Camera Calibration;3D Reconstruction;Lens Distortion
1引言
在机器视觉的应用中,如基于地图生成的视觉、移动机器人的自定位、视觉伺服等的应用中,从二维图像信息推知三维世界物体的位姿信息是很重要的。目前已经出现了一些自定标和免定标的方法,这些方法在比较灵活的同时,尚不成熟[1],难以获得可靠的结果。通过摄像机的定标重建目标物三维世界目标物体仍然是重要的方法。
摄像机定标在机器视觉中决定:
(1)内部参数给出摄像机的光学和几何学特性% %%焦距,比例因子和镜头畸变。
(2)外部参数给出摄像机坐标相对于世界坐标系的位置和方向,如旋转和平移。
在机器人的视觉应用中,目标物位姿信息获取通常有一定的精度要求,机器人视觉系统的性能很大程度上依赖于定标精度。
随着计算机性能的快速提高,低价位CCD摄像机的大量使用,计算机定标方法也得到了不断的改进。
2摄像机模型
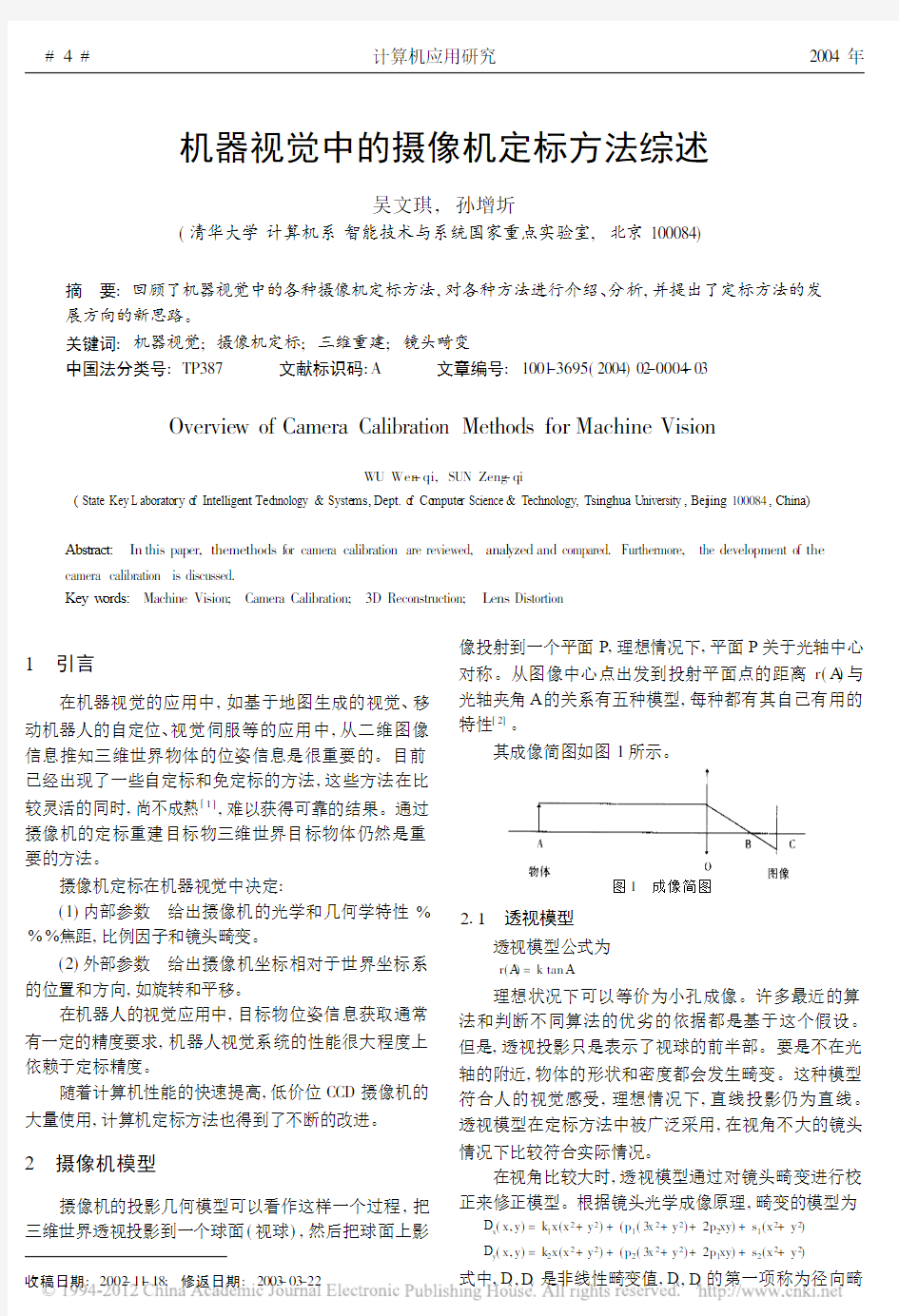
摄像机的投影几何模型可以看作这样一个过程,把三维世界透视投影到一个球面(视球),然后把球面上影像投射到一个平面P,理想情况下,平面P关于光轴中心对称。从图像中心点出发到投射平面点的距离r(A)与光轴夹角A的关系有五种模型,每种都有其自己有用的特性[2]。
其成像简图如图1所示。
图1成像简图
2.1透视模型
透视模型公式为
r(A)=k tan A
理想状况下可以等价为小孔成像。许多最近的算法和判断不同算法的优劣的依据都是基于这个假设。但是,透视投影只是表示了视球的前半部。要是不在光轴的附近,物体的形状和密度都会发生畸变。这种模型符合人的视觉感受,理想情况下,直线投影仍为直线。透视模型在定标方法中被广泛采用,在视角不大的镜头情况下比较符合实际情况。
在视角比较大时,透视模型通过对镜头畸变进行校正来修正模型。根据镜头光学成像原理,畸变的模型为D
x
(x,y)=k1x(x2+y2)+(p1(3x2+y2)+2p2xy)+s1(x2+y2)
D
y
(x,y)=k2x(x2+y2)+(p2(3x2+y2)+2p1xy)+s2(x2+y2)
式中,D x,D y是非线性畸变值,D x,D y的第一项称为径向畸
#
4
#计算机应用研究2004年
收稿日期:2002-11-18;修返日期:2003-03-22
变,第二项称为离心畸变,第三项称为薄棱镜畸变,其中k1,k2,p1,p2,s1,s2称为非线性畸变参数。
并不是引入较多的参数就一定能提高模型的精度[3]。如果只考虑径向畸变,可以写成
x c=x(1+k1r2)
y c=y(1+k2r2)
其中,x c,y c为理想无畸变情况下的图像坐标值。
212立体图投影模型
立体图投影模型为
r(A)=k tan(A/2)
Fleck等认为这种投影模型是更好的更广泛适用的模型[2]。它的特征是,球形物体经过立体图投影后,仍然保持球形。理想的立体图投影模型只有三个自由度(图像中心和焦距),而且,小物体的形状不会由于其所处视野的位置发生变化。目前,从这个模型出发的标定方法并不多见。
其他投影模型有等距投影、等立体角投影和Sine法则投影等。
3标定方法
有很多方法进行标定,已有的方法大体上可以分为三种类型:线性标定,非线性标定和两步标定。
(1)线性标定
线性方法通过解线性方程获得转换参数。算法速度快但是没考虑摄像机镜头的畸变问题)))未知数的数目通常比实际自由度要大,由于这种冗余,实际的中间参数的约束不满,而且最终结果的正确性是显著噪声敏感的。由于比较简单,直接线性转换(DL T)在线性标定方法中是应用最为广泛的。
(2)非线性标定
非线性方法使用大量的未知数和大范围的非线性优化。非线性模型越准确,计算代价越高。这样可以补偿镜头畸变允许采纳更为复杂的映像模型。但是,算法的迭代本质需要良好的初始估计。并且,如果迭代过程设计不恰当的话,尤其在高扭曲的条件下,优化过程可能不稳定。这些技术包括:Faig.s方法[4]、Sobel标定系统[5]、Gennery立体视觉标定方法[6]和Paque tte方法[7]等等。
(3)两步标定
两步标定方法包括用解析解得到多数标定参数和用迭代解获得其他一些参数。Tsai[8]使用径向校准约束来获得外部参数和焦距的线性解。迭代方案又用来估计处理径向畸变的相关的三个参数,有效的焦距、平移向量的深度组元。Sid-Ahmed[9]考虑了径向和切向畸变, Wen提出了一种CCD立体视觉的非线性畸变模型,考虑了主要的摄像机畸变来源,如径向、离心和薄棱镜畸变[10]。
也有一些其他的特殊标定技术:Martins[11]使用两平面方法,Fishler和Ballas[12]提出了一种几何方法,也有提
出不用任何具体模型用人工神经网络[13]和统计方法[14]来解决问题的。
基于透视模型的方法主要有以下几种:
(1)Tsai方法(TS)
基于切向畸变相对径向畸变可以忽略的假设,TS方法可以在考虑镜头畸变的情况下计算摄像头内外部参数。在这种方法中,可以不同的方式安装摄像头,使用单目非共面点作为计算的依据[15]。
(2)Faugeras-Toscani方法(F T)
这种方法不考虑镜头畸变,摄像头由四个参数来描述:两个焦距参数,一个用于考虑不同分辨率的图像平面轴的参数和图像中心。这种模型无须知道像素间距,虽然这种方法得到的信息可以转换为相应的TS方法的参数[16]。
(3)Martins的两平面方法
这种方法不明确地使用摄像机模型,它用世界坐标系下的视线,定义的视线从工作场景前后两个平面出发,到图像上某点的连线。给定空间的标定点以及其图像上的对应点,用插入方法可计算出两张图,插入的方法是:对于每个图像上的点,在前平面和后平面上定义两个对应的点,来定义视线向量。在这种方法中,考虑用局部插入,图像用顶点和标定格交点一致的三角形标画,然后在三角形内线性样条插值[17]。
(4)Pollastri方法(PL)
这种方法不考虑镜头畸变,其目标是根据其他摄像机参数独立地算出图像中心C
x
,C y和焦距f[18]。
(5)Caprile-Torre方法(CT)
这种方法考虑了镜头的畸变,它是基于没影点的性质来计算的,如果没影点和空间三个互相垂直的方向已经给定,那么顶点在没影点的三角形的重心与图像的中心相对应。内部参数用设计的一个含有三个正交系表面画有平行线正方体计算得到。与三个坐标系相对应
的没影点用来计算C
x
,C y和焦距f[19]。
(6)张正友方法
这是一种适合应用的一种新的、灵活的方法。这种方法虽然也是使用针孔模型,但是它的具体标定是在自标定与摄影测量标定之间的一个妥协方法。这种标定方法既具有较好的鲁棒性,又不需昂贵的精制标定块,推动了计算机视觉从实验室向实际应用的迈进。
该方法假设标定用平面图板在世界坐标系中Z=0,通过线性模型分析计算得出摄像机参数的优化解,然后用基于最大似然法进行非线性求精。在这个过程中标定出考虑镜头畸变的目标函数,最后求出所需的摄像机
#
5
#
第2期吴文琪等:机器视觉中的摄像机定标方法综述
内、外部参数[20]。
目前,基于立体图投影模型应用的方法比较少。Daniel E.Ste venson等提出的非参数畸变校正的方法使用了这个模型,他们使用一些大小不等的小黑木球,根据立体图投影的特性,通过图像处理获得图像椭圆,并使用Delaunay三角划分法,最后获知每个划分三角的理想输出比例,从而完成对图像的校正[21]。
4发展与展望
定标方法从不同的模型出发有不同的方法,适当地根据镜头应用情况采用不同的模型是提高定标精度,提高算法效率的重要途径。随着广角镜CCD摄像机的广泛使用,计算机性能的大幅度提高,广角镜的定标、镜头畸变校正有相当大的研究价值和使用价值。
张正友方法是近年来应用较为广泛的一种比较成熟的方法。由线性模型入手的方法来说,这种方法简单、方便、可靠。无须具备计算机视觉和3D图形学知识就可以应用,把三维计算机视觉从实验室推进到实际应用。
张正友方法在进行线性内外参数估计时,由于假定此时模板图像上的直线经透视投影仍然为直线,进而进行图像处理,获得亚像素精度的点坐标,实际上引入了误差,所以在广角镜畸变比较大的情况下,经实验,校正效果偏差比较大。我们认为,对于广角镜的标定方法,若能先进行畸变校正,然后利用简单线性模型进行参数估计,求得摄像机内外参数,将可能获得应用更为广泛的摄像机定标方法。
设计新的比较符合摄像机成像物理模型而又便于分析计算的实用模型是条另辟蹊径的发展方向。立体图模型由于其自身的特点使得广角镜的定标方法中的应用具有相当大的发展潜力,我们设想利用立体图模型,经过适当的图像处理方法,首先一定程度上纠正镜头畸变和相应参数,而后使用线性模型进行摄像机定标方法是可行的,尤其在广角镜甚至鱼眼镜头的定标中取得良好的效果。
参考文献:
[1]S Bougoux.From Projective to Euclidean Space under any Pract-i
cal Situation,a Criticism of Sel-f calibration[C].Proceedings of
the6th International Conference on Computer Vision,1998.790-
796.
[2]Fleck Margaret M.Perspective Projection:The Wrong Imaging
Model[Z].TR95-01,CS,U.Iowa,1995.
[3]马颂德,张正友.计算机视觉)))计算理论与算法基础
[M].北京:科学出版社.59-61.
[4]W Faig.Calibration of Close-range Photogrammerty Systems:
Mathematical Formation[J].Photogramm.Eng.Remote Seris.,
1975,41(12):1479-14861[5]L Sobel.On Calibrati on Computer Controlled Cameras for Per-
ceiving3D Scenes[J].Arti f.Intel,1974,(5):185-1981
[6]G B Gennery.Stereo-camera Calibration[C].Proc.Image Under-
standing Workshop,19701101-1081
[7]L Paquette,R Stamp fler,W A Davis,et al.A New Camera Ca-
libration M ethod for Robotic Vision[C].Proc.SPIE,Int.Soc.
Opt.Eng.,1990.658-663.
[8]R Y Tsai.An Efficient and Accurate Camera Calibration Tech-
nique for Recognition[C].Miami,FL.,1986.364-374.
[9]M A Sid-Ah med,T B Mohamed.Dual Camera Calibration for3-
D Machine Vision Metrology[J].IEE
E Trons.Instrm.Meas,
1990,(39):512-516.
[10]Weng J,P Cohen,M Herni ous.Calibration of Stereo Cameras
Using a Nonlinear Distortion Nodel(CCD Sensory)[C].Proc.
10th In t.conf.Pattern Recogni tion,1990.246-253.
[11]H A Martins,J R Birk,R V Kelly.Camera Calibration Based
on Data from Two Calibrati on Plames[J].Comp ut Grap h Image Processing,1981,17:173-180.
[12]M Fishler,R Ballas.Random Sample Consensus:A Paradi gm
for Model Fi tting with Applications to Image Analysis and Au to-
mated Cartography,Common,Assoc[J].Comput,24:381-395.
[13]J Wen,G Sch wei tzer.Hybrid Calibration of CCD Cameras Using
Artgificial Neural Nets[C].1991IEEE,Int.Joint Conf.Neural Networks,1991.173-180.
[14]R L Czaplewski.Misclassfication Bias in Area Es timates[J].
Photogramm Eng.Remote Sensing,1992,58(2):189-192. [15]R Tsai.A Versatile Camera Calibration Technique for High Ac-
curacy3D Machine Vision Metrology Using of-f the-shelf tv Cameras and Lenses[R].Research Report51342,IB M T.J.
Watson Research Center,Yorktown Heights,NY10598,1985.
[16]O Faugeras,G Toscani.The Cali bration Problem for Stereo[C].
https://www.360docs.net/doc/26837388.html,puter Vision,1990.127-140.
[17]H A Martins,J R Birk,R B Kelley.Camera Models Based on
Data from Two Calibration Planes[J].Comp.Vi sion Graphics and Image Proc.,1981,(17):173-180.
[18]F Pollastri.Metodo Per La Misura Della Posizione Del Punto Fo-
cale in Unsistema Diripresa Di Imma Gi ni[Z].Patent n.67782-
S/89,1989.
[19]B Caprile,V https://www.360docs.net/doc/26837388.html,ing Vanishing Points for Camera Calibra-
tion[J].Int.Journal of Computer Vision,1990,(4):127-140 [20]Z Zhang.A Flexible New Technique for Camera Calibration.
Technical Report MSR-TR-98-71,M icrosoft Research,Dec 1998.Available Together with the Software[EB/OL].http://
https://www.360docs.net/doc/26837388.html,/~zhang/Calib/.
[21]Daniel E Steven,M argaret M Fleck.Nonparametric Correction of
Distortion Application of Computer Vision[C].WACV.96,Pro-
ceedings3rd IEEE Workshop on,1996.214-219.
作者简介:
吴文琪(1975-),男,硕士研究生,研究领域为机器人视觉和图像处理;孙增圻(1943-),男,教授,博士生导师,清华大学计算机系学术委员会主任,主要研究领域为机器人、智能控制、神经网络及模糊系统等。
#
6
#计算机应用研究2004年
摄像机监控距离对照表
一、高速球综述 高速球是一种智能化摄像机前端,全名叫高速智能化球型摄像机,或者一体化高速球智能球,或者简称快球,简称高速球。高速球是监控系统最复杂和综合表现效果最好的摄像机前端,制造复杂、价格昂贵,能够适应高密度、最复杂的监控场合。 二、高速球的结构及原理 高速球是一种集成度相当高的产品,集成了云台系统、通讯系统、和摄像机系统,云台系统是指电机带动的旋转部分,通讯系统是指对电机的控制以及对图象和信号的处理部分,摄像机系统是指采用的一体机机心。而几大系统之间,起着横向的连接的是一块主控核心cpu和电源部分。电源部分通过与各大系统之间供电,很多地方是采用的二极管、三极管等微电流供电,而核心cpu是实现所有功能正常运行的基础。 高速球的原理实际上大致就是以上所说的,而具体来说,高速球采用“精密微分步进电机”实现高速球的快速、准确的定位、旋转。所有这一切都是通过cpu发给的指令来实现的。然后将摄像机的图象、摄像机的功能写进高速球的cpu,实现在控制云台的时候,将图象传输出来,并且能将摄像机的很多功能,例如白平衡、快门、光圈、变焦、对焦等功能同时实 现控制。 一般高速球都分为球心部分、外壳部分及配件部分。任何厂家的高速球,都有一个用机架把包一体机机心、控制解码主板和电机云台系统的统一起来的球心部分,然后球心部分跟外壳用螺丝或者别的方式连接起来,球心是核心部分,外壳一般有多种外观,比如派尔高外观、松下外观、和自己设计的外观。外壳一般都是采用铝合金,也有塑料的,铝合金的一般又分为铸造和冲压的两种外壳。铝合金的比塑料的好,冲压的比铸造的好。下外壳是透明罩部分,透明罩必须采用光学透明罩,才能保证通光率和图象无变形,同时还要考虑防老化、防破坏、防尘等问题。配件部分一般包括支架部分,加热器部分,扇热部分。支架包括壁装
摄像机标定方法综述
摄像机标定方法综述 摘要:首先根据不同的分类方法对对摄像机标定方法进行分类,并对传统摄像机标定方法、摄像机自标定方法等各种方法进行了优缺点对比,最后就如何提高摄像机标定精度提出几种可行性方法。 关键字:摄像机标定,传统标定法,自标定法,主动视觉 引言 计算机视觉的研究目标是使计算机能通过二维图像认知三维环境,并从中获取需要的信息用于重建和识别物体。摄像机便是3D 空间和2D 图像之间的一种映射,其中两空间之间的相互关系是由摄像机的几何模型决定的,即通常所称的摄像机参数,是表征摄像机映射的具体性质的矩阵。求解这些参数的过程被称为摄像机标定[1]。近20 多年,摄像机标定已成为计算机视觉领域的研究热点之一,目前已广泛应用于三维测量、三维物体重建、机器导航、视觉监控、物体识别、工业检测、生物医学等诸多领域。 从定义上看,摄像机标定实质上是确定摄像机内外参数的一个过程,其中内部参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标、焦距、比例因子和镜头畸变等;而外部参数的标定是指确定摄像机坐标系相对于某一世界坐标系的三维位置和方向关系,可用3 ×3 的旋转矩阵R 和一个平移向量t 来表示。 摄像机标定起源于早前摄影测量中的镜头校正,对镜头校正的研究在十九世纪就已出现,二战后镜头校正成为研究的热点问题,一是因为二战中使用大量飞机,在作战考察中要进行大量的地图测绘和航空摄影,二是为满足三维测量需要立体测绘仪器开始出现,为了保证测量结果的精度足够高,就必须首先对校正相机镜头。在这期间,一些镜头像差的表达式陆续提出并被普遍认同和采用,建立起了较多的镜头像差模型,D.C.Brown等对此作出了较大贡献,包括推导了近焦距情况下给定位置处径向畸变的表达式及证明了近焦距情况下测得镜头两个位置处的径向畸变情况就可求得任意位置的径向畸变等[2]。这些径向与切向像差表达式正是后来各种摄像机标定非线性模型的基础。随着CCD器件的发展,现有的数码摄像机逐渐代替原有的照相机,同时随着像素等数字化概念的出现,在实际应用中,在参数表达式上采用这样的相对量单位会显得更加方便,摄像机标定一词也就代替了最初的镜头校正。
监控系统摄像机选型标准
监控系统摄像机选型标准 镜头是摄像机的眼睛,其性能的优劣直接关系到摄像机成像画面是否清晰。因而若要实现摄像机的效能最大化。 一、安防监控系统镜头选用 1.镜头焦距:方案设计人员在考虑镜头指标时需要根据监控目标的位置、距离、CCD规格,以及监控目标在监视器上的图像效果等综合地来进行考虑,以选择最合适的焦距的镜头。比如,生产线监控,一般需要监看比较近的物体,而且对清晰度要求较高。这种情况,定焦镜头的效果一般要比变焦的好,所以通常会选择短焦距定焦镜头。如 2.8mm、4mm、6mm、8mm等。 又如监控室内目标时,选择的焦距不会太大,一般会选择短焦距的手动变焦镜头,如3.0-8.2mm、2.7-12.5mm等;道路监控中,多车道监控要用焦距短一些的,如6-15mm;十字路口的红绿灯车牌监控要用相应长一些的焦距,如6-60mm;城市治安监控一般就要用到焦距更长一些的电动变焦镜头,如6-60mm、8-80mm、7.5-120mm等;高速公路、铁路、河道、环境检测、森林防火、机场、边海防等,一般要用到大变倍长焦距的电动变焦镜头,如10-220mm、13-280mm、10-330mm、15-500mm及10-1100mm等。 2.视场角范围:视场角范围计算是有公式的,知道镜头的焦距、CCD尺寸,视场角就可以推算出来。镜头有这样的规律:焦
距越大,监控得越远,视场角就越小;焦距越小,监控距离就近,视场角就大,焦距和视场角是反比关系。如在一些有手动变焦镜头需求的项目中,视场角范围是最先需要考虑的,所以一般会根据视场角范围来确定所选焦距范围。电动变焦镜头因为是可以根据现场环境随时用键盘控制变焦、聚焦的,所以视场角范围不是太需要考虑。但是当电动变焦镜头的起始焦距过大(比如起始焦距超过20mm)时,是无法实现大范围监控的。 3.镜头的光圈:镜头的通光量以镜头的焦距和通光孔径的比值来衡量(F=f/D),以F标记。每个镜头上均标有其最大F值,F 值越小,则光圈越大。对于恒定光照条件的环境,可以选用固定光圈的镜头,这种一般为实验室环境;对于光照度变化不明显的环境,常会选用手动光圈镜头,即将光圈调到一个比较理想的数值后固定下来就可以了;如果照度变化较大,需24小时的全天候室外监控,应选用自动光圈镜头。 二、监控镜头的应用场所 固定光圈镜头:定焦且固定光圈,主要用于环境光线固定的场所; 手动光圈镜头:定焦但光圈可调,主要用于环境光线固定但明暗不定的场所; 自动光圈镜头:固定焦距,使用DC电压驱动用于环境光线变化性的固定范围场所;
机器视觉技术发展现状文献综述
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
摄像机录制方式详解
摄像机录制方式详解 磁带类 VSH 格式:现在不用很少见的:(这种格式是JVC公司1976年推出的,我国家庭中使用的 像机绝大多数是这种格式。 S-VHS 格式:这是VHS格式的高带方式,亮度信号信噪比提高4dB 以上,使S-VHS 格式的图像清晰度达到水平400线,也能应用于广播业务领域。 Betamax 格式:这是索尼公司研制的,对抗VSH的。 VHS-C 格式:磁带盒几乎是VHS 型磁带盒大小的一半。8mm 型/Hi8 型等。 1.U型机:3/4英寸专业录像机(有高/低带)。磁鼓上装有两个相隔180度的(Y/C)视频录放磁头,每旋转一周两个磁头各记录一场信号,磁头鼓的旋转频率为25Hz。磁鼓直径比较大,记录速度较高视频磁迹较宽,相邻迹间有空白保护区。音频磁迹共有两条,控制磁迹为一条,记录控制脉冲(CTL)信号。 2.Betacam SP型录像机:使用1/2英寸金属磁带。它采用分量记录两对磁头同时而又独立地在磁带上分别记录亮度和色度信号。色度信号采用时间轴压缩(CTDM)技术,克服了清晰度降低,彩色失真,信杂比降低的缺点。 3.MⅡ格式分量录像机:了解资料不多。 4.DV 数码格式:DV(Digital Video Cassette)。DV 系统的亮度信号的取样频率高达13.5MHz,而色信号的取样频率也可达3.375MHz,清晰度理论上可达500线,视频信噪比可达54dB。在音响方面也很考究,有16比特/48千赫 44.1千赫 32千赫两声道及12比特/32千赫四声道几种规格。 5.DVCPRO 格式:DVCPRO是1996年松下公司在DV格式基础上推出的一种新的数字格式。它采用 4:1:1取样,5:1压缩,18微米的磁迹宽度。1998年又在 DVCPRO的基础上推出了DVCPRO50,它采用4:2:2取样,3.3:1压缩。1999年开始推出更高级的产品DVCPRO100,又称DVCPRO HD,向数字电视的更高水准--高清晰度电视领域发展。DVCPRO 家族可满足现场演播室以及更多广播级和专业级应用的需要。 6.Digital-S 格式:是日本JVC公司于1995年4月推出的一种新型的广播专业级数字分量录像机(也称D-9格式)。它是以S-VHS技术为基础开发的具有高效编码数字技术S格式的录像标准,它可以重放S-VHS的图像信号,录像带宽度为12.7毫米(1/2英寸),采用4:2:2取样,8BIT量化,采用帧内3.3:1压缩,视频数据率为50MBPS。可记录4路音频,每路48KHZ取样,16BIT量化。 7. DVCAM 格式:1996年推出了 DVCAM 格式的数字设备.采用5:1的压缩比,4:2:0 (PAL) 取样方式,8比特数字分量记录,保证了画面的高质量,并可兼容重放家用数字 DV 录像带,具有优越的性价比。 8.Betacam-SX 格式:它采用了MPEG-2 MP@ML 的扩展4:2:2P@ML 标准。在保证高图像质量的同时有较高的压缩比(10:1). 9.Digital-Betacam 格式:SONY公司于1993年推出 Betacam数字分量录像机。采用1/2英寸金属带。视频信号采用4:2:2取样,数字输入10BIT量化,模拟输入8BIT量化,帧内2:1数据压缩.
摄像机标定程序使用方法
摄像机内部参数标定 一、材料准备 1 准备靶标: 根据摄像头的工作距离,设计靶标大小。使靶标在规定距离范围里,尽量全屏显示在摄像头图像内。 注意:靶标设计、打印要清晰。 2图像采集: 将靶标摆放成各种不同姿态,使用左摄像头采集N幅图像。尽量保存到程序的debug->data文件夹内,便于集中处理。 二、角点处理(Process菜单) 1 准备工作: 在程序debug文件夹下,建立data,left,right文件夹,将角探测器模板文件target.txt复制到data文件夹下,便于后续处理。 2 调入图像: File->Open 打开靶标图像 3 选取角点,保存角点: 点击Process->Prepare Extrcor ,点击鼠标左键进行四个角点的选取,要求四个角点在最外侧,且能围成一个正方形区域。每点击一个角点,跳出一个显示角点坐标的提示框。当点击完第四个角点时,跳出显示四个定位点坐标的提示框。 点击Process->Extract Corners ,对该幅图的角点数据进行保存,最好保存到debug->data-> left 文件夹下。命名时,最好命名为cornerdata*.txt,*代表编号。 对其余N-1幅图像进行角点处理,保存在相同文件夹下。这样在left文件夹会出现N个角点txt 文件。 三、计算内部参数(Calibration菜单) 1 准备工作: 在left文件夹中挑出5个靶标姿态差异较大的角点数据txt,将其归为一组。将该组数据复制到data文件夹下,重新顺序编号,此时,文件名必须为cornerdata*,因为计算参数时,只识别该类文件名。 2 参数计算: 点击Calibration->Cameral Calibrating,跳出该组图像算得的摄像机内部参数alpha、beta、gama、u0、v0、k1、k2七个内部参数和两组靶标姿态矩阵,且程序默认保存为文件CameraCalibrateResult.txt。 3 处理其余角点数据文件 在原来N个角点数据文件中重新取出靶标姿态较大的5个数据文档,重复步骤1和2;反复取上M组数据,保存各组数据。 注意:在对下一组图像进行计算时,需要将上一组在data文件夹下的5个数据删除。 四、数据精选 1 将各组内部参数计算结果进行列表统计,要求|gama|<2,且gama为负,删掉不符合条件的数据。 挑出出现次数最高的一组数据。2 摄像机外部参数标定
基于OpenCV的CCD摄像机标定方法_雷铭哲_孙少杰_陈晋良_陶磊_魏坤
MethodofCCDCameraCalibrationBasedOnOpenCV LEIMing-zhe1,SUNShao-jie2,CHENJin-liang1,TAOLei1,WEIKun1 (1.North Automation Control Technology Institute ,Taiyuan 030006,China ; 2.Navy Submarine Academy ,Qingdao 266042,China )Abstract: Computervisionhasbeenwidelyusedinindustry,agriculture,military,transportationareaandsoon.Cameracalibrationisveryimportantandalsothekeyresearchfieldofvisionsystem.ThispapermainlyresearchesonthemethodofCCDcameracalibration,thepin-holemodelhasbeenintroducedandappliedinprocessofcalibration.Specially,inordertoimprovetheaccuracy,bothradialandtangentiallensdistortionhavebeentakenintoaccountduringtheimplementofcalibrationbasedonOpenCV.Thiskindofarithmetichaspracticalvalueontheapplicationdesignofimageprocessingandcomputervision,andexperimentresultsshowgoodprecision,whichcanmeettheapplicationneedofvisualinspectionorothervisionsystemswell. Keywords: pin-holemodel,cameracalibration,lensdistortion,OpenCV摘要: 计算机视觉在工业,农业,军事,交通等领域都有着广泛应用。摄像机标定是视觉系统的重要环节,也是研究的关键领域。以摄像机标定技术为研究对象,选取针孔成像模型,简述了世界坐标系、摄像机坐标系和图像坐标系及其相互间的位置关系,对标定过程进行了深入研究。特别地,为提高标定精度,充分考虑了透镜径向和切向畸变影响及其求解方法,制作了棋盘格平面标定模板,基于开放计算机视觉函数库(OpenCV)实现了摄像机标定。该标定算法能够充分发挥OpenCV函数库功能,对于图像处理与计算机视觉方面的应用设计具有实用价值。实验结果表明该方法取得了较高精度,能够满足视觉检测或其他计算机视觉系统的应用需要。 关键词:针孔模型,摄像机标定,透镜畸变,OpenCV中图分类号:S219 文献标识码:A 基于OpenCV的CCD摄像机标定方法 雷铭哲1,孙少杰2,陈晋良1,陶 磊1,魏坤1 (1.北方自动控制技术研究所,太原030006;2.海军潜艇学院,山东青岛266042 )文章编号:1002-0640(2014) 增刊-0049-03Vol.39,Supplement Jul,2014 火力与指挥控制 FireControl&CommandControl第39卷增刊 引言 摄像机标定是计算机视觉系统的前提和基础,其目的是 确定摄像机内部的几何和光学特性(内部参数)以及摄像机 在三维世界中的坐标关系(外部系数) [1] 。考虑到摄像机标定在理论和实践应用中的重要价值,学术界近年来进行了广泛的研究。 摄像机标定方法可以分为线性标定和非线性标定,前者简单快速,精度低,不考虑镜头畸变;后者由于引入畸变参数而使精度提高,但计算繁琐,速度慢,对初值选择和噪声敏感。本文将两者结合起来,采用由粗到精策略,以实现精确标定。 1摄像机模型 本文选取摄像机模型中常用的针孔模型[2-3],分别建立三维世界坐标系(O w X w Y w Z w ),摄像机坐标系(O c X c Y c Z c )及图像平面坐标系(O 1xy ) 如下页图1所示。其中摄像机坐标系原点O c 为摄像机光心,Z c 轴与光轴重合且与图像平面垂直,O c O 1为摄像机焦距f 。图像坐标系原点O 1为光轴与图像平面的交点,x ,y 轴分别平行于摄像机坐标系X c 、Y c 轴。设世界坐标系中物点P 的三维坐标为(X w ,Y w ,Z w ),它在理想的针孔成像模型下图像坐标为P (X u ,Y u ),但由于透镜畸变引起偏离[4-5],其实际图像坐标为P (X d ,Y d )。图像收稿日期:2013-09-20修回日期:2013-11-10 作者简介:雷铭哲(1977-),男,湖北咸宁人,硕士。研究方向:故障诊断系统。 49··
基于机器视觉的工件识别和定位文献综述
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
三种2D-3D定位算法(摄像机定标)
《2D-3D 定位算法》笔记 中英对照: 世界坐标系或实体坐标系(3D):object coordinate system 。 摄像机坐标系(3D): camera coordinate system 。 图像坐标系(2D): image coordinate system ,在摄像机坐标系下取x 和y 坐标即为图像坐标系。 2D-3D 点对:2D-3D correspondences ,根据投影变换将3D 点投影为2D 点。 平移变换:translation projection 旋转变换:rotation projection 比例变换:scale projection 透视投影变换:perspective projection 正交投影变换:orthographic projection 2D-3D 定位算法:根据 已给出的若干对 3D 点p i (在世界坐标系或实体坐标系下)和 相对应的 2D 点p i '(在图像坐标系下或在摄像机坐标系下取x 和y 坐标),求出之间的投影变换矩阵(旋转变换和平移变换)。 文献1: 《A Comparison of 2D-3D Pose Estimation Methods 》 文献2: 《A Comparison of Iterative 2D-3D Pose Estimation Methods for Real-Time Applications 》 文献3: 《计算机视觉》-马颂德 一、CamPoseCalib(CPC) 1、基本思想:根据非线性最小二乘法,最小化重投影误差求出投影参数 ),,,,,(γβαθθθθθθθz y x =。 2、算法过程: (1)已给出若干点对)'~ ,(i i p p ,其中i p 是实体坐标系下的3D 点,' ~i p 我理解为事 先给出的图像坐标系下的2D 点,应该是给出的测量值 。 (2)将i p 先经过旋转变换 i z y x p R R R ???)()()(γβαθθθ 和平移变换 T z y x ),,(θθθ ,得 到 摄 像 机坐标系下的点 i z y x T z y x i p R R R p m ???+=)()()(),,(),(γβαθθθθθθθ 。 (3)再将像机坐标系下的点),(i p m θ进行透视投影变换得到图像坐标系下的2D 点:
摄像机的光学系统
3.2 摄像机的光学系统 摄像机光学系统是摄像机重要的组成部分,它是决定图像质量的关键部件之一,也是摄像师拍摄操作最频繁的部位。摄像机的光学系统由内、外光学系统两部分组成,外光学系统便是摄像镜头,内光学系统则是在机身内部的分光系统和各种滤色片组成。图3—7所示为三片摄像机光学系统的基本组成。 图中:1—镜头;2—色温滤色片;3—红外截上滤色片; 4—晶体光学低通滤色片;5—分光棱镜;6—红、绿、蓝谱带校正片。 一.透镜成像的误差及其补偿 除了平面反射镜之外,任何光学系统成像都是有误差的。因此,我们要了解透镜成像的误差性质及其补偿方法。进而了解摄像机光学系统如何解决了透镜质量问题。 1.球差 为凸透镜孔径较大时,从轴上物点P发出的单色光束。通过透镜时,由于凸透镜的边缘部分比中心部分弯曲的厉害些,所以通过边缘部分的光线比近轴光线折射的严重,致使边缘部分的光线含聚于焦点F之前的F的点,因此在焦点处形成了一个中心亮、边缘模糊的小图盘,而不是很清晰的小亮点,这样的像差称为球差。如图3—8。 图3—8 2.色差
如图3—9,轴上一点P发出的光为复色光,由于玻璃对不同波长的光折射率略有不同,因此不同波长的光不能会聚于一点,如图上蓝光因波长较短成像于Q F点,而红光因波长较长成像于Q C点。这样形成的像差称为色差,表现为图像边缘有彩色镶边。 图3—9 3.像的几何失真 这种失真影响像与物的几何相似性,一般有桶形失真和枕形失真。(1)桶形失真 这种失真也称正失真,它是由于在物与透镜之间放置了一个光阑而形成的像差。其特点是整个像面的四个角向中心收拢,显得中间向外凸,如图3-10。 (2)枕形失真 这种失真也称负失真,它是固在透镜与像点之间放了一个光阑而形成的像差。其特点是整个像面的四个角向外拉伸,与桶形失真真正相反,如图3—11所示。
三维重建综述
三维重建综述 三维重建方法大致分为两个部分1、基于结构光的(如杨宇师兄做的)2、基于图片的。这里主要对基于图片的三维重建的发展做一下总结。 基于图片的三维重建方法: 基于图片的三维重建方法又分为双目立体视觉;单目立体视觉。 A双目立体视觉: 这种方法使用两台摄像机从两个(通常是左右平行对齐的,也可以是上下竖直对齐的)视点观测同一物体,获取在物体不同视角下的感知图像,通过三角测量的方法将匹配点的视差信息转换为深度,一般的双目视觉方法都是利用对极几何将问题变换到欧式几何条件下,然后再使用三角测量的方法估计深度信息这种方法可以大致分为图像获取、摄像机标定、特征提取与匹配、摄像机校正、立体匹配和三维建模六个步骤。王涛的毕业论文就是做的这方面的工作。双目立体视觉法的优点是方法成熟,能够稳定地获得较好的重建效果,实际应用情况优于其他基于视觉的三维重建方法,也逐渐出现在一部分商业化产品上;不足的是运算量仍然偏大,而且在基线距离较大的情况下重建效果明显降低。 代表文章:AKIMOIO T Automatic creation of3D facial models1993 CHEN C L Visual binocular vison systems to solid model reconstruction 2007 B基于单目视觉的三维重建方法: 单目视觉方法是指使用一台摄像机进行三维重建的方法所使用的图像可以是单视点的单幅或多幅图像,也可以是多视点的多幅图像前者主要通过图像的二维特征推导出深度信息,这些二维特征包括明暗度、纹理、焦点、轮廓等,因此也被统称为恢复形状法(shape from X) 1、明暗度(shape from shading SFS) 通过分析图像中的明暗度信息,运用反射光照模型,恢复出物体表面法向量信息进行三维重建。SFS方法还要基于三个假设a、反射模型为朗伯特模型,即从各个角度观察,同一点的明暗度都相同的;b、光源为无限远处点光源;c、成像关系为正交投影。 提出:Horn shape from shading:a method for obtaining the shape of a smooth opaque object from one view1970(该篇文章被引用了376次) 发展:Vogel2008年提出了非朗伯特的SFS模型。 优势:可以从单幅图片中恢复出较精确的三维模型。 缺点:重建单纯依赖数学运算,由于对光照条件要求比较苛刻,需要精确知道光源的位置及方向等信息,使得明暗度法很难应用在室外场景等光线情况复杂的三维重建上。 2、光度立体视觉(photometric stereo) 该方法通过多个不共线的光源获得物体的多幅图像,再将不同图像的亮度方程联立,求解出物体表面法向量的方向,最终实现物体形状的恢复。 提出:Woodham对SFS进行改进(1980年):photometric method for determining surface orientation from multiple images(该文章被引用了891次) 发展:Noakes:非线性与噪声减除2003年; Horocitz:梯度场合控制点2004年; Tang:可信度传递与马尔科夫随机场2005年; Basri:光源条件未知情况下的三维重建2007年; Sun:非朗伯特2007年; Hernandez:彩色光线进行重建方法2007年;
机器视觉文献综述
文献综述 河北科技师范学院 文献综述 题目:基于计算机视觉测量技术 姓名:张力坤 一.国内外现状 机器视觉自起步发展到现在,已有将近20年的发展历史。应该说机器视觉作为一种应用系统,其功能特点是随着工业自动化的发展而逐渐完善和发展的。 目前全球整个视觉市场总量大概在70~80亿美元,是按照每年8.8%的增长速度增长的。而在中国,这个数字目前看来似乎有些庞大,但是随着加工制造业的发展,中国对于机器视觉的需求将承上升趋势。 何谓机器视觉? 简言之,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。在中国,这种应用也在逐渐被认知,且带来最直接的反应就是国内对于机器视觉的需求将越来越多。 机器视觉在国内外的应用现状在国外,机器视觉的应用普及
摄像机标定程序使用方法
一、材料准备 1 准备靶标: 根据摄像头的工作距离,设计靶标大小。使靶标在规定距离范围里,尽量全屏显示在摄像头图像内。 注意:靶标设计、打印要清晰。 2图像采集: 将靶标摆放成各种不同姿态,使用左摄像头采集N幅图像。尽量保存到程序的debug->data文件夹内,便于集中处理。 二、角点处理(Process菜单) 1 准备工作: 在程序debug文件夹下,建立data,left,right文件夹,将角探测器模板文件target.txt 复制到data文件夹下,便于后续处理。 2 调入图像: File->Open 打开靶标图像 3 选取角点,保存角点: 点击Process->Prepare Extrcor ,点击鼠标左键进行四个角点的选取,要求四个角点在最外侧,且能围成一个正方形区域。每点击一个角点,跳出一个显示角点坐标的提示框。当点击完第四个角点时,跳出显示四个定位点坐标的提示框。 点击Process->Extract Corners ,对该幅图的角点数据进行保存,最好保存到debug->data-> left文件夹下。命名时,最好命名为cornerdata*.txt,*代表编号。 对其余N-1幅图像进行角点处理,保存在相同文件夹下。这样在left文件夹会出现N 个角点txt文件。 三、计算内部参数(Calibration菜单) 1 准备工作: 在left文件夹中挑出5个靶标姿态差异较大的角点数据txt,将其归为一组。将该组数据复制到data文件夹下,重新顺序编号,此时,文件名必须为cornerdata*,因为计算参数时,只识别该类文件名。 2 参数计算: 点击Calibration->Cameral Calibrating,跳出该组图像算得的摄像机内部参数alpha、beta、gama、u0、v0、k1、k2七个内部参数和两组靶标姿态矩阵,且程序默认保存为文件CameraCalibrateResult.txt。 3 处理其余角点数据文件 在原来N个角点数据文件中重新取出靶标姿态较大的5个数据文档,重复步骤1和2;反复取上M组数据,保存各组数据。 注意:在对下一组图像进行计算时,需要将上一组在data文件夹下的5个数据删除。 四、数据精选 1 将各组内部参数计算结果进行列表统计,要求|gama|<2,且gama为负,删掉不符合条件的数据。 2 挑出出现次数最高的一组数据。
超高速摄像机工作原理
超高速摄像机基本依赖于进口设备,与高速相机最大的区别在于超高速摄像机极短的曝光时间、纳秒时间分辨率和纳秒级触发精度、纳秒级的帧间间隔时间(德国standford生产的超高速摄像机可达皮秒)以及数千倍的增益。而高速相机一般只能达到毫秒或微秒级,增益也是从几倍到数十倍左右。 虽然超高速摄像机拥有如此多极其优秀的特点,但超高速摄像机每次拍摄只能获得几张图像(单通道情况下),而高速相机一次拍摄可获得的图像数量可多达几万甚至数十万张。 超高速摄像机作为一种有着尖端科学技术含量的设备,在全球范围内能够生产出优质超高速摄像机的厂家并不多,而德国standford公司可以说是业内顶尖,下面以此公司的产品为例,简单介绍一下超高速摄像机的基本工作原理和特点。 超高速摄像机的超高速图像采集系统主要由相机主机、控制分析软件、图像处理仪组成。各部分示意图如下: 图像采集系统主机内主要由分光系统和ICCD通道系统组成,示意图如下:
在CCD上产生的增强的信号是由一个系列链产生的,通过以下一些部件: 超高速摄像机内部示意图: ICCD通道系统内的基本工作原理:通过透镜将拍摄的目标对像光信号传送到增强器的光阴极上,像增强器在高压窄脉冲控制下输出具有较短曝光时间的图像,并由后续CCD接收和记录。系统曝光时间和摄影频率由像增强器驱动源以及精密同步系统控制。
多通道图像分光耦合系统工作原理:传统的图像分割技术往往使用立方或半透膜分束器将一个图像分割成两个相同的低强度二级图像。由于一般图像都不是单频的,所以传统技术都不可能预测强度比率。XXRapidFrame系列相机使用全反射镜观察所有子图像,使得所有的强度分布都能在一个镜像几何函数中反映出来。这个方法可以很容易地扩展到紫外光谱区域。在每个光学路径的通道上都装有一个滤波器,它能产生一些特殊的效果,比如对一个实验生成三种颜色的图像。对于各种通道设置的不同延迟时间,它还可以用来恢复成3-D空间信息。下图为图像分光耦合系统示意图: Stanford Computer Optics的ICCD摄像机是独立的解决方案,可以通过RS232,Camera Link或USB连接远程操作和调整。4 Spec E软件可以作为一体化解决方案,以满足超高速ICCD摄像机系统的所有操作要求。
PTZ摄像机的技术优势和发展趋势
PTZ摄像机的技术优势和发展趋势 ——深圳市保千里电子有限公司安防渠道部总监吴雪芳传感器和计算机计算的发展影响了新型计算机网络和处理框架的发展。其中,中小型视频监控网络已经被广泛应用。 在现代监控系统中,多摄像机追踪问题中的一个主要挑战是如何在不同的FOV下保持目标标识的连续性。尽管静态摄像机网络可以为监控任务覆盖一个广阔的区域,但为了增加摄像机监控区域增加摄像机可视角度时,图片分辨率会因此降低;当不存在重叠的FOV时,信号处理必须仍然在单个数据源上执行。因此,PTZ摄像机的引入,为摄像机网络的发展带来了全新的应用优势。 球型摄像机(PTZ Dome)是一种一体化球型摄像机,具有运转速度快、光学变焦、定位精确、控制方式灵活等特点,随着整个监控行业数字化、网络化、高清化发展的进程,网络PTZ摄像机在产品的开发上也迈入了一个新的阶段,高清PTZ摄像机成为监控行业新的热点。其主要具有以下四大应用优势。 以太网供电 ALL IN ONE,即一个网线实现所有数据的传输,这是网络监控的一个重要优势。以太网供电IEEE 802.3af(在POE交换机端的电压是48V DC,最大功率15.4W),只适合给固定网络摄像机和固定半球摄像机进行供电。 High PoE ,802.3at在电压范围支持50-57V DC,标程为53VDC,最大功率支持30W,完全可给快球摄像机及其护罩供电。通过High PoE,网络快球不需要任何视频线、音频线、控制线、电源线等,只需连接一根网线,即可实现所有线缆的连接。 为了缩短网络高清PTZ摄像机的安装时间,及更好地保证快球的安装质量,
更多网络高清PTZ摄像机尤其是室外型高清PTZ摄像机在出厂时,就已经配置好了IP66护罩及预装好的支架,开箱即用,可实现网络快球的快速安装,且可充分保证安装质量。 自动翻转结构设计 PTZ球型摄像机根据其机械构造的不同,可分为高速球机和PTZ摄像机两种类型,两种类型统称为PTZ球型摄像机。 高速球采用轴传动,结构结实,可实现360度的连续旋转,但成本较高。而PTZ摄像机采用齿轮传动,由于存在限位,无法实现360度旋转,但成本低廉。因此,既可实现360度旋转又保证较低制造成本的360度自动翻转PTZ摄像机技术也被应用于高清PTZ摄像机中。 这种球形摄像机同PTZ摄像机一样,采用齿轮传动,也有限位。当对摄像机进行360度水平旋转控制,在到达限位时,摄像将在0.1秒内水平反向旋转180度,垂直反向旋转180度,在跳过限位后,继续按照人员控制的方向旋转,从而实现了360度的连续旋转。 在不要求摄像机长时间连续旋转的情况下,既希望实现360度的监控,又希望快球价格较低时,这种结构的摄像机是非常不错的选择。一般情况下,这种自动翻转结构的快球摄像机,其水平旋转速度和垂直选择速度均可达到300度/秒的速度,并可根据变焦情况,自动调整旋转速度,从而保证长焦的精确限速。 更灵活的控制方式 高清PTZ摄像机的技术发展,使得监控的应用需求进一步提高。尤其是基于网络化的摄像机控制和操作,要求高清PTZ网络摄像机能够迅速响应控制命令,并实现摄像机的转动和变焦。
摄像机的光学系统
摄像机的光学系统
3.2 摄像机的光学系统 摄像机光学系统是摄像机重要的组成部分,它是决定图像质量的关键部件之一,也是摄像师拍摄操作最频繁的部位。摄像机的光学系统由内、外光学系统两部分组成,外光学系统便是摄像镜头,内光学系统则是在机身内部的分光系统和各种滤色片组成。图3—7所示为三片摄像机光学系统的基本组成。 图中:1—镜头;2—色温滤色片;3—红外截上滤色片; 4—晶体光学低通滤色片;5—分光棱镜;6—红、绿、蓝谱带校正片。 一.透镜成像的误差及其补偿 除了平面反射镜之外,任何光学系统成像都是有误差的。因此,我们要了解透镜成像的误差性质及其补偿方法。进而了解摄像机光学系统如何解决了透镜质量问题。 1.球差 为凸透镜孔径较大时,从轴上物点P发出的单色光束。通过透镜时,由于凸透镜的边缘部分比中心部分弯曲的厉害些,所以通过边缘部分的光线比近轴光线折射的严重,致使边缘部分的光线含聚于焦点F之前的F的点,因此在焦点处形成了一个中心亮、边缘模糊的小图盘,而不是很清晰的小亮点,这样的像差称为球差。如图3—8。 图3—8 2.色差
如图3—9,轴上一点P发出的光为复色光,由于玻璃对不同波长 的光折射率略有不同,因此不同波长的光不能会聚于一点,如图上蓝光因波长较短成像于Q F点,而红光因波长较长成像于Q C点。这样形成的像差称为色差,表现为图像边缘有彩色镶边。 图3—9 3.像的几何失真 这种失真影响像与物的几何相似性,一般有桶形失真和枕形失真。(1)桶形失真 这种失真也称正失真,它是由于在物与透镜之间放置了一个光阑而形成的像差。其特点是整个像面的四个角向中心收拢,显得中间向外凸,如图3-10。 (2)枕形失真 这种失真也称负失真,它是固在透镜与像点之间放了一个光阑而形成的像差。其特点是整个像面的四个角向外拉伸,与桶形失真真正相反,如图3—11所示。
机器视觉中的摄像机定标方法综述
机器视觉中的摄像机定标方法综述 吴文琪,孙增圻 (清华大学计算机系智能技术与系统国家重点实验室,北京100084) 摘要:回顾了机器视觉中的各种摄像机定标方法,对各种方法进行介绍、分析,并提出了定标方法的发展方向的新思路。 关键词:机器视觉;摄像机定标;三维重建;镜头畸变 中国法分类号:TP387文献标识码:A文章编号:1001-3695(2004)02-0004-03 Overvie w of Camera Calibration Methods for Machine Vision WU Wen-qi,SUN Zeng-qi (State Key L aborato ry o f Intellige nt Tec hnology&Syste ms,Dept.o f Co mpute r Science&Technology,Tsinghua Universit y,Bei jing100084,China) Abstract:In this paper,themethods for camera calibration are reviewed,anal yzed and compared.Furthermore,the develop ment of the camera calibration is discussed. Key w ords:Machine Vision;Camera Calibration;3D Reconstruction;Lens Distortion 1引言 在机器视觉的应用中,如基于地图生成的视觉、移动机器人的自定位、视觉伺服等的应用中,从二维图像信息推知三维世界物体的位姿信息是很重要的。目前已经出现了一些自定标和免定标的方法,这些方法在比较灵活的同时,尚不成熟[1],难以获得可靠的结果。通过摄像机的定标重建目标物三维世界目标物体仍然是重要的方法。 摄像机定标在机器视觉中决定: (1)内部参数给出摄像机的光学和几何学特性% %%焦距,比例因子和镜头畸变。 (2)外部参数给出摄像机坐标相对于世界坐标系的位置和方向,如旋转和平移。 在机器人的视觉应用中,目标物位姿信息获取通常有一定的精度要求,机器人视觉系统的性能很大程度上依赖于定标精度。 随着计算机性能的快速提高,低价位CCD摄像机的大量使用,计算机定标方法也得到了不断的改进。 2摄像机模型 摄像机的投影几何模型可以看作这样一个过程,把三维世界透视投影到一个球面(视球),然后把球面上影像投射到一个平面P,理想情况下,平面P关于光轴中心对称。从图像中心点出发到投射平面点的距离r(A)与光轴夹角A的关系有五种模型,每种都有其自己有用的特性[2]。 其成像简图如图1所示。 图1成像简图 2.1透视模型 透视模型公式为 r(A)=k tan A 理想状况下可以等价为小孔成像。许多最近的算法和判断不同算法的优劣的依据都是基于这个假设。但是,透视投影只是表示了视球的前半部。要是不在光轴的附近,物体的形状和密度都会发生畸变。这种模型符合人的视觉感受,理想情况下,直线投影仍为直线。透视模型在定标方法中被广泛采用,在视角不大的镜头情况下比较符合实际情况。 在视角比较大时,透视模型通过对镜头畸变进行校正来修正模型。根据镜头光学成像原理,畸变的模型为D x (x,y)=k1x(x2+y2)+(p1(3x2+y2)+2p2xy)+s1(x2+y2) D y (x,y)=k2x(x2+y2)+(p2(3x2+y2)+2p1xy)+s2(x2+y2) 式中,D x,D y是非线性畸变值,D x,D y的第一项称为径向畸 # 4 #计算机应用研究2004年 收稿日期:2002-11-18;修返日期:2003-03-22