机器人视觉系统标定问题研究综述_田梦倩
收稿日期:2005-05-18
基金项目:江苏省自然科学基金资助项目(BK2002405)作者简介:田梦倩(1971-),女,副教授,研究领域为机电控制及自动化、机器人技术。
机器人视觉系统标定问题研究综述
田梦倩
(东南大学机械工程系,江苏南京210096)
摘要:在视觉反馈机器人的控制中,摄像机的标定是一个基本的、重要性的问题。该文首先对摄像机的成像模型进行分析,明确了视觉系统标定的主要任务,然后从离线标定和在线标定两方面阐述了相关的研究思路和方法,为机器人视觉系统的研究提供了参考。
关键词:机器人;视觉反馈;摄像机标定;离线标定;在线标定
中图分类号:TP242.6+
2 文献标识码:A 文章编号:100020682(2006)022*******
A survey of ca li bra ti on i n a v isi on 2robot system
TI A N M eng 2qian
(D ept of M echanical Engineering ,Southeast U niversity,J iangsu N anjing 210096,China )
Abstract:Ca mera calibrati on is a basic and crucial p r oble m in the field of r obot contr ol with visi on feedback .The paper analyses the i m age 2for m ing model of a ca mera t o decide how t o calibrate its main pa 2ra meters and then discusses the relevant methods according t o s ome different criteria,which are classified int o off 2line calibrati on and on 2line calibrati on .
Key words:r obot;visi on feedback;ca mera calibrati on;off 2line calibrati on;on 2line calibrati on
0 引言
智能机器人是装备有某些类似人的感觉装置,具有感觉识别、判断功能,能根据周围环境的变化,按规则调整自己动作的机器人。在人的众多感觉中,视觉是人最重要的感官之一。因而,机器人视觉定位、视觉导引、视觉伺服也是智能机器人领域的研究热点之一。视觉反馈机器人可以广泛地应用在工业中的焊接、装配、搬运;工件表面质量、几何形状的测量;微电子器件的自动检测;空间技术中的交会对接、卫星回收等各种场合[1]
。这些应用能否准确实现,视觉系统能否获得高精度的反馈信息,都涉及到一个基本的、重要的问题,即视觉系统的高精度标定。
视觉系统的标定问题包括摄像机模型的建立及模型中各参数精确值的获得。确定这一参数值的过程可以分为两部分:摄像机内部参数标定、摄像机坐标系与机器人坐标系之间转换关系(即手-眼关系)的标定。
国外在机器人视觉标定方面做了大量的研究,
并提出了一系列切实可行的方法,而国内关于此方面的研究报道却不多,并且只限于静态的离线标定
方面[7~10]
。该文首先对机器人视觉系统的成像模型进行了详细的分析,按照标定过程是否与机器人控制相结合、是否为动态过程,将视觉反馈机器人的标定方法分为离线标定和在线标定两类,并分别阐述了相关的研究思路和方法,为机器人视觉系统的研究提供了参考。
1 摄像机的成像模型
由于空间某点的几何位置与其在图像中对应点的相互关系是由摄像机的成像模型决定的,因此,正确建立摄像机的成像模型是关键。
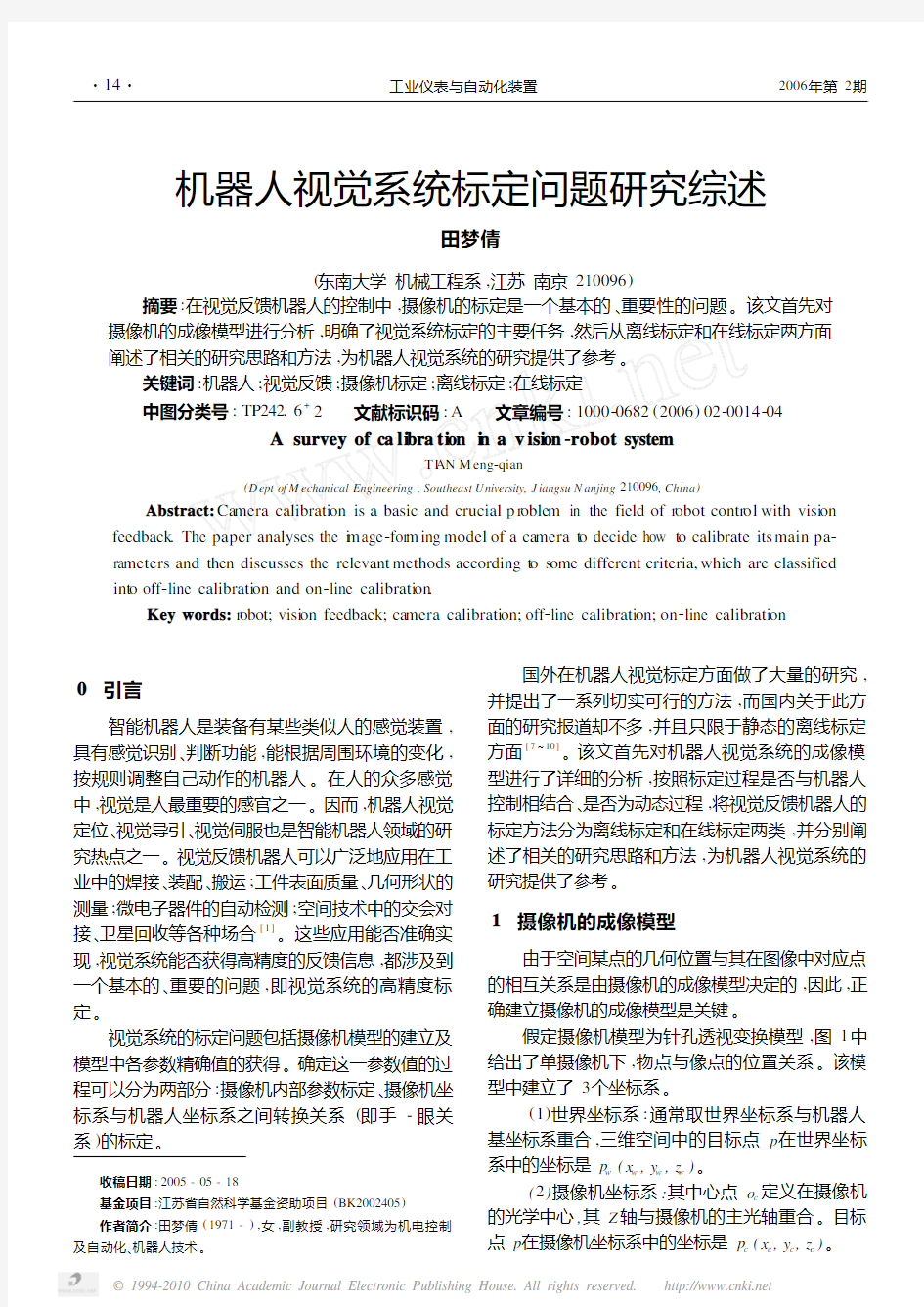
假定摄像机模型为针孔透视变换模型,图1中给出了单摄像机下,物点与像点的位置关系。该模型中建立了3个坐标系。
(1)世界坐标系:通常取世界坐标系与机器人基坐标系重合,三维空间中的目标点p 在世界坐标系中的坐标是p w (x w ,y w ,z w )。
(2)摄像机坐标系:其中心点o c 定义在摄像机的光学中心,其Z 轴与摄像机的主光轴重合。目标点p 在摄像机坐标系中的坐标是p c (x c ,y c ,z c )。
图1 摄像机成像模型示意图
(3)图像坐标系:此坐标系为二维坐标系,其原点为图像平面与主光轴的交点,其X 轴和Y 轴分别与摄像机成像靶面像素行和列平行。图像平面与摄像机平面平行,距离为焦距f 。若不考虑畸变,目标点p 的理想成像在图像平面的坐标是p d (x d ,y d ),图1中考虑一阶径向畸变后,成像点坐标为p i (x i ,y i )。
u -o ′i -v 为计算机中处理的像素平面,o ′i 的像素
坐标是(c x ,c y )。
因为摄像机的透镜可以被转动和拆卸,所以CCD 面阵安装并不能保证以透镜的光轴为中心,且
图像采集数字化窗口的中心不一定与光学中心重合,所以对三维视觉来说,必须精确标定摄像机的光学中心;CCD 驱动信号经采集卡采样,水平像元的等效间距也要发生变化,所以需要标定图像的纵横比。
目标点p 从基坐标系变换到图像坐标系,需要经过如下几步变换,其中所涉及的参数就是摄像机标定需要解决的问题。
基坐标系与摄像机坐标系之间的变换关系为:
x c y c z c
=c
w R
x w y w z w
-T x
T y T z
(1)
其中,c
w R 是3×3的正交旋转矩阵,是两个坐标
系间旋转角θ,ψ,φ的函数,T =(T x ,T y ,T z )T
为平移
向量。
根据小孔摄像机模型,假定Z c μf,从摄像机坐标系到图像平面经过透视变换,理想图像坐标p d 为:
x d =
f z c x c y d =f
z c
y c (2)
在考虑一阶径向畸变后,像点p i 的坐标为:
x i =x d (1+kr 2
) y i =y d (1+kr 2
)(3)
式中,用(1+kr 2)来近似表达径向畸变,r 2=x 2
i
+y 2
i ,k 为径向畸变系数。
真实图像坐标p i 到计算机像素坐标(u,v )的转
换关系为:
x i =(u -c x )/s x y i =(v -c y )/s y
(4)式中,s x ,s y 分别是摄像机成像靶面上单位距离的像素数。
综上所述,需标定的摄像机内部参数有c x ,c y ,k,f,s x ,s y 共6个,其中,s x ,s y 一般可以由摄像机及图像采集卡厂商提供的参数间接求得,可以作为精确标定的初值;手-眼关系标定的参数有摄像机的旋转变换矩阵和平移向量,考虑到旋转矩阵的正交性,也有6个参数需标定。
2 标定方法
针对视觉系统标定时采用的方式不同,按照标定过程是否与机器人控制相结合、是否为动态过程,将视觉反馈机器人的标定方法分为离线标定和在线
标定两类,也分别称做静态标定、动态标定[5]
。2.1 离线标定法
离线标定是最基本的标定方法,典型的方式是在一平面模板上分布有尺寸及排列规律已知的参照物,如圆形、正方形或正六边形,通过图像处理获取需要的一组特征点的像素坐标,对应成像模型中各参数的关系,建立方程组,通过数学方法求解标定参数。这一过程比较繁琐,而且求取过程对数学计算要求比较高。在离线标定时机器人不进行伺服控制,所以又称做静态标定。该方法可以分为3类:线性标定、非线性标定以及分步标定法。
线性标定技术指通过直接求解线性公式来确定变换参数,也称作直接线性变换法(DLT )。这种算法简捷,因而被广泛使用,但未考虑透镜的畸变;通常未知数的数目大于实际自由度,这使得求解未知参数的约束难以得到满足,结果的准确性也对噪声比较敏感。
非线性标定技术考虑了镜头畸变所引入的非线性方程,为求解数目众多的未知数而采用了非线性
优化方法。如Zhuang [3]
提出的一步法,将机器人手眼关系与机器人执行器作为一个整体来建模,利用复杂的非线性优化方法同时计算摄像机参数和转换矩阵。这种方法建立的模型精确,但计算复杂,并且要求初始条件适当;否则,非线性搜索优化计算容易陷入局部最小。
综合考虑上述两种方法的优劣,有学者提出分步完成标定问题。Tsai[2]提出的两步法首先用线性变换的方法来求解手-眼坐标系变换关系等外部参数,通过施加不同的运动约束(如纯平移或纯旋转)来避免旋转和平移的耦合。第2步用迭代算法来估计畸变系数等参数。Hakan[4]将这一方法加以改进:1)用线性最小二乘法估算标定参数;2)用优化方法从上一步的结果中确定旋转变换矩阵,进而确定平移变换及投影变换关系;3)用非线性优化方法确定透镜畸变系数。
分步法综合了前两种方法的特点,算法简单、快速,非常适合摄像机经常变动的场合,但会出现累积误差的问题。
上述的离线标定方法只考虑参考目标在视觉系统中的定位,没有充分利用机器人系统的定位功能,有学者[6,7]对机器人视觉系统手眼关系的快速标定问题展开了研究。这类方法大多采用机器人的本体坐标系作为世界坐标系,通过安装在机器人上的高精度传感器,获得摄像时刻机器人末端执行器在世界坐标系中的三维位置,同时,末端执行器的位置在图像中也能得到,通过坐标变换,即可推导出机器人的手-眼关系。该标定方法只在一个位置对标定点取像,不需要借助其他的坐标测量仪器,就可以一次标定出摄像机的内外参数及机器人的手-眼关系。优点是算法简单、过程方便,但前提假设是不考虑透镜畸变。同时,依赖于机器人本体参数的精确标定。
2.2 在线标定法
在线标定方法是一种动态标定,指在估计摄像机内部参数及手-眼变换关系的同时,还实现机器人的伺服控制,通过机器人理想轨迹、速度与实际轨迹、速度等信息的误差,不断校正待标定的参数,在这一动态过程中同时完成标定及伺服控制等任务。
对于动态标定的基于图像伺服控制方法,关键思路就是设计一算法在线计算逆图像雅可比矩阵。文献[12]建立了一固定摄像机的视觉系统,机器人对运动目标实现轨迹跟踪。采用准牛顿法动态估计图像雅可比矩阵,Hos oda[13]采用递归最小二乘法(RLS)更新图像雅可比矩阵,将这一方法的应用扩展到机器人跟踪运动目标的应用中。另外,有学者[10,11]采用Kal m an滤波器技术实现视觉机器人系统的动态标定。
对视觉机器人系统的控制,由于模型参数的不确定及摄像机标定误差导致控制精度的下降;另一方面,由于机器人系统的非线性及动力学模型的不准确,系统的动态特性不佳。针对这两方面问题,有学者提出综合考虑机器人非线性动力学、摄像机动态标定的自适应控制器,它通常是根据机器人的动力学方程设计机器人的计算力矩控制律,结合自适应控制理论设计待标定参数的更新律,通过稳定性分析,能在保证末端执行器位置误差收敛的同时进行摄像机的自标定。这类方法在一些文献中又称做自标定、无标定或者自适应标定控制。这些研究的实验平台大多为一单目固定视觉的平面机器人系统[14~23]。
Kelly等[14,15]提出了一个典型的视觉机器人系统,设计了一个定点控制器以补偿摄像机内部参数以及手眼关系转换矩阵的不确定性,并且获得了局部收敛的稳定的结果,但要求已知机器人重力项参数;B ishop[16,17]建立了一逆动力学控制器,也称做计算力矩控制,在控制过程中,图像平面与机器人基坐标系间的变换关系等参数能够根据设计的更新律在线调整,最终完成标定与控制两方面的工作。但该方法要求已知机器人系统准确的动力学模型。
Zerger oglu[18,19]设计了未知模型参数不同的两个自适应控制器,在假设机器人本体动力学参数已知的情况下,设计的控制器能够实现全局渐进的轨迹跟踪,可以补偿摄像机标定参数的不确定性,同时,能够保证位置跟踪误差收敛到零。进一步,在对整个机器人-视觉系统建模的情况下,将其变换关系矩阵转化成正定对称结构,实现了自标定机器人视觉伺服控制。
L iu H su等[20,21]建立参数化的动力学方程,同时根据摄像机的投影关系,得到目标特征点的变化与其关节速度的关系。这个关系中隐含着标定的参数,最终建立一模型参考自适应控制器,并通过递阶控制[21]或非线性P I控制器[20]求解,使得参考模型与系统模型的误差趋于零。
Yantao Shen[22,23]通过对图像雅可比矩阵的分析,将其表示成机器人运动学雅可比矩阵与机器人-视觉之间旋转矩阵的积,由此,提出一种在线估计旋转矩阵的自适应算法。在提出的控制算法中,相对于视觉坐标系测量得到的末端执行器的位置误差是通过估计的旋转矩阵被反馈到机器人控制器的,当所设计的末端执行器的理想速度满足持续激励的条件时,估计的旋转矩阵将会收敛到真值。进一步,将这一思想推广基于图像的控制算法中,同样实现了自适应标定与控制。
3 总结
视觉系统的离线标定是一项繁复的工作,需要好的算法,离不开精密的测量设备,也可以与其他传感器相结合来进行;在线标定方法以实现机器人精确控制为目的,依靠算法来完成部分参数(如焦距、手眼关系矩阵)的标定。为解决摄像机的标定问题并达到较高的精度,可以将论文中所述的几种方法相结合,首先采用分步法进行离线标定,将标定的结果作为自适应标定控制的初值,在伺服控制过程中动态更新标定参数,以达到更高的精度。
由于研究的角度不同、采用的方法不同、理论与实际的差距以及新兴技术与设备的出现,机器人视觉系统标定的方法难以在该论文中完全体现,这也正表明该技术在不断发展、不断深入的研究中。
参考文献:
[1] S Hutchins on,G Hager,P I Corke.A tut orial intr oducti on
t o visual servo contr ol[J].I EEE Trans on Robotics and
Aut omati on,1996,12(5):651-670.
[2] Tsai R Y,Lenz R K.A ne w technique f or fully aut ono2
mous and efficient3D r obotics hand2eye calibrati on[J].
I EEE Transacti ons on Robotics and Aut omati on,1989,5
(3):345-358.
[3] Zhuang H Q,Wang K,Roth Z S.Si m ultaneous calibrati on of
a r obot and a hand2mounted ca mera[J].I EEE Transacti ons
on Robotics and Aut o mati on,1995,11(5):649-640.
[4] Hakan Bacakoglu,Moha med S Ka mel.A three2step ca m2
era calibrati on method[J].I EEE Transacti ons on I nstru2
mentati on and M easure ment,1997,46(5):1165-1172. [5] Graziano Chesi,Koichi Hashi m ot o.A self2calibrati on tech2
nigue f or visual servoing[C].Pr oceedings of the41st
I EEE I nternati onal Conference on Decisi on and Contr ol,
Las Vegas,Nevada US A,Dece mber2002.
[6] 苏剑波,席裕庚.机器人/视觉系统非标定的平面运动
跟踪[J].系统工程与电子技术,1999,21(6):50-53. [7] 朱振友,徐爱杰.机器人视觉的“手-眼”关系快速标
定算法[J].光学技术,2004,30(2):150-152.
[8] 李仁举,钟约先.三维测量系统中摄像机定标问题
[J].清华大学学报,2002,42(4):481-483.
[9] 张贞子,罗 兵.机器人视觉定位系统的研究与实现
[J].哈尔滨工业大学学报,1997,29(6):85-89. [10] 毛剑飞,诸 静.工业机器人视觉定位系统高精度标
定技术研究[J].机器人,2004,26(2):139-144. [11] Elena Stringa,Carl o S Regazzoni.A Novel Ca mera Cali2
brati on A lgorith m Based on Kal m an Filter[C].I EEE,
2000.
[12] L iang Ping,Chang Yuhlin.Adap tive self2calibrati on of
visual2based r obot syste m s[J].I EEE Transacti ons on
Syste m s,M an and Cybernetics,1989,19(4):811-
824.
[13] J A Piepmeier,G V Mcmurray.Uncalibrated dyna m ic
visual servoing[J].I EEE Transacti ons on Robotics and
Aut omati on,2004,20(1):143-147.
[14] K Hos oda,M A sada.Versatile visual servoing without
knowledge of true Jacobian[C].Pr oceedings of the
I EEE I nternati onal Conference on I ntelligent Robots and
Syste m s,Munich,Ger many,1994.
[15] R Kelly,A M arquez.Robust asy mp t otically stable visual
servoing of p lanar r obots[J].I EEE Transacti ons on Ro2
botics and Aut omati on,1996,(12):759-766.
[16] R Kelly,Paul Shirkey,Mark W Spong.Fixed2Camera
V isual Servo Contr ol f or Planar Robots[C].Pr oceedings
of the1996I EEE I nt.Conf.Robotics and Aut omati on,
M inneapolis,M innes ota,1996.
[17] B E B ishop,M ark W S pong.Adap tive Calibrati on and
Contr ol of2D Monocular V isual Servo Syste m s[J].Con2
tr ol Engineering Practice,1999,(7):423-430.
[18] B E B ishop,Paul Shirkey,Mark W Spong.An experi2
mental testbed f or intelligent contr ol[C].Pr oceedings of
the American Contr ol Conference,Seatile,W ashingt on,
1995.
[19] E Zerger oglu,D M Daws on.Adap tive ca mera calibrati on
contr ol of p lanar r obots:eli m inati on of ca mera s pace ve2
l ocity measurements[C].Pr oceedings of the2000I EEE
I nt.Conf.Contr ol App licati ons,Anchorage,A laska,US A,
2000.25-27.
[20] E Zerger oglu,D M Da ws on.V isi on2based nonlinear
tracking contr ollers with uncertain r obot2ca mera para m2
eters[J].I EEE Transacti ons on M echatr onics,2001,6
(3):322-336.
[21] L iu H su.T wo s oluti ons t o the adap tive visual servoing
p r oble m[J].I EEE Trans on Robotics and Aut omati on,
2002,18(3):387-392.
[22] L iu H su,Ra mon R Costa.Stable adap tive visual servoing
f or movin
g targets[M].Pr oc.of the American Contr ol
Conf,Chicage,US A,2000.2008-2012.
[23] Shen Yantao,L iu Yunhui.Adap tive moti on contr ol of
mani pulat ors with uncalibrated visual feedback[C].
Pr oceedings of the2002I EEE/RSJ I nt.Conf.I ntelligent
Robots and Syste m s,EPE L,Lausanne,S witzerland,
2002.
[24] Shen Yantao,Sun Dong,L iu Yunhui.A sy mp t otic trajec2
t ory tracking of mani pulat ors using uncalibrated visual
feedback[J].I EEE/AS ME Transacti ons on Mechatr on2
ics,2003,8(1):87-98.
puma250机器人运动学分析
焊接机器人运动分析 摘要:针对puma250焊接机器人,分析了它的正运动学、逆运动学的问题。采用D-H坐标系对机器人puma250 建立6个关节的坐标系并获取D-H 参数,并对其运动建立数学模型用MATLAB编程,同时仿真正运动学、逆运动学求解和轨迹规划利用pro-e对puma250建模三维模型。 关键词:puma250焊接机器人;正逆解;pro-e;Matlab;仿真 一、建立机器手三维图 Puma250机器人,具有6各自由度,即6个关节,其构成示意图如图1。各连杆包括腰部、两个臀部、腕部和手抓。设腰部为1连杆,两个臀部分别为2、3连杆,腰部为4连杆,手抓为5、6连杆,基座不包含在连杆范围之内,但看作0连杆,其中关节2、3、4使机械手工作空间可达空间成为灵活空间。1关节连接1连杆与基座0,2关节连接2连杆与1连杆,3关节连接3连杆与2连按,4关节连接4连杆与3连杆,5关节连接5连杆与4连杆。各连杆坐标系如图 2 所示。
图1 puma250 机器人二、建立连杆直角坐标系。
三、根据坐标系确定D-H表。 四、利用MATLAB 编程求机械手仿真图。>>L1=Link([pi/2 0 0 0 0],'standard'); L2=Link([0 0 0 -pi/2 0],'standard'); L3=Link([0 -4 8 0 0],'standard'); L4=Link([-pi/2 0 8 0 0],'standard'); L5=Link([-pi/2 0 0 -pi/2 0],'standard'); L6=Link([0 2 0 -pi/2 0],'standard'); bot=SerialLink([L1 L2 L3 L4 L5 L6],'name','ROBOT'); ([0 0 0 0 0 0])
机器视觉技术发展现状文献综述
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
工业机器人运动学标定及误差分析(精)
工业机器人运动学标定及误差分析 运动学标定是机器人离线编程技术实用化的关键技术之一,也是机器人学的重要内容,在机器人产业化的背景下有十分重要的理论和现实意义。机器人运动学标定以运动学建模为基础,几何误差参数辨识为目的,为机器人的误差补 偿提供依据。工业机器人在以示教方式工作时,以重复精度为主要指标;在以离 线编程方式工作时,主要工作指标变为绝对精度。但是,工业机器人重复精度较 高而绝对精度较低,难以满足离线编程工作时的精度,所以需要进行运动学标定 来提高其绝对精度。随着机器人离线编程系统的发展,工业机器人运动学标定日益重要。本文首先综合分析了工业机器人运动学标定的一些基本理论,为之后的运动学建模和标定提供理论基础。根据ABB IRB140机器人实际结构,本文建立 了D-H运动学模型,并讨论了机器人的正运动学问题和逆运动学问题的解;然后 指出了该模型在标定中存在的缺陷,结合一种修正后的D-H模型建立了本文用于标定的模型。并根据最终建立的运动学模型建立了机器人几何误差模型。本文 还在应用代数法求解机器人逆运动学问题的基础上,进行了应用径向基神经网络求解机器人逆解的研究。该方法结合机器人正运动学模型,以机器人正解为训练样本训练经遗传算法优化后的径向基神经网络(GA-RBF网络),实现从机器人工 作变量空间到关节变量空间的非线性映射,从而避免复杂的公式推导和计算。本文在讨论了两种构造机器人封闭运动链进行运动学标定的方法的基础上,提出了一种新的机器人运动学标定方法——虚拟封闭运动链标定法。并对该方法的原理、系统构成进行了详细的分析和说明。该方法通过一道激光束将末端位置误 差放大在观测平板上,能够获得更高精度的关节角的值,从而辨识出更为准确的 几何参数。为了验证本文提出的虚拟封闭运动链标定方法的有效性和稳定性,本文以ABB IRB140机器人为研究对象,利用有关数据进行了仿真分析,最终进行了标定试验,得出结论。 同主题文章 [1]. 王金友. 中国工业机器人还有机会吗?' [J]. 机器人技术与应用. 2005.(02) [2]. 李如松. 工业机器人的应用现状与展望' [J]. 组合机床与自动化加工技术. 1994.(04) [3]. 赖维德. 工业机器人知识讲座——第一讲什么是工业机器人' [J]. 机械工人.冷加工. 1995.(02) [4]. 世界工业机器人产业发展动向' [J]. 今日科技. 2001.(11) [5]. 人丁兴旺的机器人大家族' [J]. 网络科技时代(数字冲浪). 2002.(01)
【CN109910014A】基于神经网络的机器人手眼标定方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910276856.4 (22)申请日 2019.04.08 (71)申请人 上海嘉奥信息科技发展有限公司 地址 201304 上海市浦东新区书院镇丽正 路1628号4幢1-2层 (72)发明人 肖建如 吕天予 (74)专利代理机构 上海汉声知识产权代理有限 公司 31236 代理人 庄文莉 (51)Int.Cl. B25J 9/16(2006.01) (54)发明名称 基于神经网络的机器人手眼标定方法 (57)摘要 本发明提供一种基于神经网络的机器人手 眼标定方法,确定NDI坐标系、NDI工具坐标系、机 器人坐标系;根据NDI坐标系和工具坐标系,对机 械臂TCP末端的工具尖端进行位置标定,得到工 具尖端位置;采集m个点集组,每个点集组分别包 括NDI坐标系下的工具尖端的坐标位置、机器人 坐标系下的工具的位置和旋转矩阵,基于罗德里 格旋转公式对从机器人坐标系转换到NDI坐标系 的转换矩阵进行转换,构建正向传播网络,基于 正向传播网络,生成反向传播网络,得到参数的 偏导数;采用牛顿梯度下降进行计算,得到手眼 标定矩阵。本发明方便快捷,易于实施,标定精 确,在标定过程中无需机械臂绕一点转动,可在 空间中任意采集姿态。权利要求书1页 说明书5页 附图1页CN 109910014 A 2019.06.21 C N 109910014 A
1.一种基于神经网络的机器人手眼标定方法,其特征在于,包括: 坐标系确定步骤:分别确定红外定位装置NDI的NDI坐标系、机械臂TCP末端的NDI工具坐标系、机器人坐标系; 尖端标定步骤:根据NDI坐标系和工具坐标系,对机械臂TCP末端的工具尖端进行位置标定,得到工具尖端位置; 数据采集步骤:采集m个点集组,每个点集组分别包括NDI坐标系下的工具尖端的坐标位置P ndi 、机器人坐标系下的工具的位置和旋转矩阵M robot ,设置NDI工具坐标系下工具尖端的位置P robot ,从机器人坐标系转换到NDI坐标系的转换矩阵M robot2ndi ,所述工具尖端的坐标位置P ndi 满足P ndi =M robot2ndi *M robot *P robot ; 神经网络构建步骤:基于罗德里格旋转公式对转换矩阵M robot2ndi 进行转换,构建正向传播网络,基于正向传播网络,生成反向传播网络,得到参数的偏导数; 坐标求解步骤:基于偏导数,采用牛顿梯度下降进行计算,得到手眼标定矩阵。 2.根据权利要求1所述的基于神经网络的机器人手眼标定方法,其特征在于,所述尖端标定步骤是将工具尖端插入机械臂工具中,以设定角度做绕点旋转运动,采用最小二乘法求出尖端位置。 3.根据权利要求2所述的基于神经网络的机器人手眼标定方法,其特征在于,所述设定角度是30度至45度。 4.根据权利要求1所述的基于神经网络的机器人手眼标定方法,其特征在于,所述NDI 坐标系是NDI红外定位装置的坐标系; 所述NDI工具坐标系是绑定在工具上的四个红外小球构成结构所定义的坐标系;所述机器人坐标系是机器人底座中心所在位置的坐标系。 5.根据权利要求1所述的基于神经网络的机器人手眼标定方法,其特征在于,所述对转换矩阵M robot2ndi 进行转换使用以下公式: θ←norm(r) r ←r/ θ 其中,θ表示绕旋转轴旋转的角度; r表示旋转轴; norm(r)表示旋转轴单位向量; r T 表示旋转轴的转置; r x 、r y 、r z 分别表示旋转轴向量的xyz分量; I表示单位矩阵; R表示旋转矩阵。 6.根据权利要求1所述的基于神经网络的机器人手眼标定方法,其特征在于,采用tensorflow工具正向传播网络、生成反向传播网络,得到参数的偏导数。 权 利 要 求 书1/1页2CN 109910014 A
机器视觉的辅助驾驶系统的视频中行人检测跟踪讲解
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
机器视觉测量技术
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
基于机器视觉的工件识别和定位文献综述
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
焊接机器人逆运动学位姿分析
1.1连杆的坐标系 应用D-H 法来建立机器人杆件的坐标系。在这种坐标系中,可以把机械手的任一连杆i (i=1,2,3···,n )看作是一个刚体,与它相邻的两个关节i 、i-1的轴线i 和i-1 之间的关系也由它确定,如图1,可以用以下四个参数描 式中,cθi =cosθi ,sθi =sinθi ,i=1,2,3,···,n 图1连杆坐标系{i}到{i-1}的变换 i αi-1/(rad )a i-1/(cm )d i /(cm 12340 90°090°042.5410014.520011.895.3表1机器人连杆参数表
定义了连杆坐标系和相应得连杆参数,就能建立运动学方程,焊接机器人末端关节的坐标系{n}相对于基础坐标系{0}中的齐次变换公式为: 对于6自由度的焊接机器人公式可以写为 (2 变换矩阵0 n T是关于n个关节变量的函数,这些变量 可以通过放置在关节上的传感器测得,则机器人末端连杆再基坐标系中的位置和姿态就能描述出来。 E n表示焊接机器人末端关节的姿态, 器人在世界坐标系中的位置。[3] 2机器人的逆运动学分析 逆运动学求解是已知机器人末端的位置和姿态即 求解机器人对应于该位置和姿态的关节角 只要0 n T表示的末端连杆坐标系的位置和姿态位于机 械手的可达空间内,则运动学方程至少有一个解, 达空间内,机械手具有任意姿态,导致运动学方程可能出现重解。 机器人的运动学方程是一组非线性方程式, 求解过程中,我们逐次在公式(4)的两端同时左乘一 即为 在上式两边的矩阵中寻找简单的表达式或常数, 对应相等,计算过程如下: ( ( ( ( ( (3求取各关节的解集 依靠D-H法求解关节角的过程是和焊接机器人本身的结构相关的,换句话说,也就是特定配置的机器人需要特定的解决方案。通过公式(6)-(16)可以看出每个关节角的结果是不唯一的,如果采用已有的求解方法,显而易见该过程是缓慢的,复杂的。本文提出了一种计算最终执行器位置的所有精确值的算法。该算法是在MATLAB 程实现的。通过该算法得到各节点的解是更快速、有效的。 用变换矩阵 6T定义一条具有两个端点A和B 轨迹,如公式(17)和(19)。从而θ能够被求出,如公式20)
基于D-H模型的机器人运动学参数标定方法
基于D-H模型的机器人运动学参数标定方法 摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。 关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型; Robot kinematic parameters calibration based on D-H model Wang Yi (State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China) Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation. Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model; 引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。机器人的运动精度对于工业机器人在生产中的应用可靠性起着至关重要的作用。机器人各连杆的几何参数误差是造成机器人系统误差的主要环节,它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的。通常,机器人以示教再现的方式工作,轨迹设定好之后,只在某些固定点之间运动,这种需求使得机器人的重复性精度被设计得很高,可以达到0.1毫米以下,但是绝对定位精度很差,可以到2、3毫米,甚至更大[1]。常见的标定方法可分为三类:一、建立微分运动学模型,然后借助标定工具测量一定数目的机器人姿态,最后用反向求解的方法得到真实值与名义值之间的偏差[2]。二、使用标定工具获得一系列姿态的数据,然后对数据用线性或非线性迭代求解的方法得到机器人几何参数的修正值[3],[4]。 三、建立机器人运动学模型,用直接测量的方法修正模型参数[5],[6],[7],[8]。最近,世界著名工业机器人生厂商ABB公司运用了莱卡激光跟踪仪以保证其产品的精度。使用激光跟踪仪标定机器人不再需要其它的测量工具,从而也就省去了标定测量工具的繁琐工作;同时,这一方法是对机器人的各个运动学几何参数进行修正,结果会使机器人在整个工作空间内的位姿得到校准,而不会像用迭代求解的方法那样,只是对某些测量姿态进行优化拟合,可能会造成在非测量点处残留比较大的误差;再者,随着机器人的机械磨损,机器人的运动学参数需要重新标定,而激光跟踪仪测量系统配置起来简单,特别适合于工业现场标定。正是鉴于以
机器视觉文献综述
文献综述 河北科技师范学院 文献综述 题目:基于计算机视觉测量技术 姓名:张力坤 一.国内外现状 机器视觉自起步发展到现在,已有将近20年的发展历史。应该说机器视觉作为一种应用系统,其功能特点是随着工业自动化的发展而逐渐完善和发展的。 目前全球整个视觉市场总量大概在70~80亿美元,是按照每年8.8%的增长速度增长的。而在中国,这个数字目前看来似乎有些庞大,但是随着加工制造业的发展,中国对于机器视觉的需求将承上升趋势。 何谓机器视觉? 简言之,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。在中国,这种应用也在逐渐被认知,且带来最直接的反应就是国内对于机器视觉的需求将越来越多。 机器视觉在国内外的应用现状在国外,机器视觉的应用普及
基于机器视觉的产品检测技术研究文献综述
基于机器视觉的产品识别检测技术研究 摘要:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标特征,如面积、数量、位置,再根据预设的允许度和其他条件输出结果,包括尺寸、个数、合格/不合格、标识有无等,实现自动识别功能。机器视觉的研究是从20世纪60年代中期开始70年代已形成几个重要研究分支:目标制导的图像处理、图像处理和分析的并行运算、序列图像分析和运动参量求值、视觉知识的表示、视觉系统的知识库等。 关键词:机器视觉;CCD相机;图像处理;产品检测。
引言 机器视觉就是用机器代替人眼来做测量和判断,它是一项综合技术,其中包括数字图像处理技术、控制技术、电光源照明技术、光学成像技术、传感技术、模拟与数字视频技术等,机器视觉更强调实用性,要求能够适应工业生产中恶略的环境,要有通用的工业接口。电视摄像技术的成熟与计算机技术的发展使得机器视觉研究成为可能,它作为早期人工智能的一部分,由于技术条件的限制进展缓慢。后来在随着计算机技术的快速发展,机器视觉的研究得到了迅速发展在国外,机器视觉的应用普及主要体现在半导体及电子行业,机器视觉系统在产品检测方面已经得到了广泛的应用。在中国机器视觉技术应用开始与90年代,目前国内机器视觉大多为外国品牌,不过随着机器视觉的应用,国内公司技术上已经逐渐成熟。与此同时,随着配套基础设施建设的完善,技术、资金的积累,各行各业对机器视觉技术的工业自动化、智能化需求开始广泛出现。国内高校校、研究所和企业在这个领域进行了积极探索和大胆尝试,这都将促进工业检测自动化技术向智能化发展。
机器视觉检测
机器视觉检测 一、概念 视觉检测是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉检测的特点是提高生产的柔性和自动化程度。 2、典型结构 五大块:照明、镜头、相机、图像采集卡、软件 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。目前没有通用的照明设备,具体应用场景选择相应的照明装置。照射方法可分为: 分类具体说明优点 背向照明被测物放在光源和摄像机之 间能获得高对比度的图像 前向照明光源和摄像机位于被测物的 同侧 便于安装 结构光将光栅或线光源等投射到被 测物上,根据它们产生的畸 变,解调出被测物的三维信 息 频闪光照明将高频率的光脉冲照射到物
体上,摄像机拍摄要求与光 源同步 2.镜头 镜头的选择应注意以下几点:焦距、目标高度、影像高度、放大倍数、影响至目标的距离、中心点/节点、畸变。 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。 要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD 和面阵CCD;单色相机和彩色相机。 为优化捕捉到的图像,需要对光圈、对比度和快门速度进行调整。 4.图像采集卡 图像采集卡是图像采集部分和图像处理部分的接口。将图像信号采集到电脑中,以数据文件的形式保存在硬盘上。通过它,可以把摄像机拍摄的视频信号从摄像带上转存到计算机中。 5.软件 视觉检测系统使用软件处理图像。软件采用算法工具帮助分析图像。视觉检测解决方案使用此类工具组合来完成所需要的检测。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。常用的包括,搜索工具,边界工具,特征分析工具,过程工具,视觉打印工具等。 3、关键——光源的选择 1.光源选型基本要素: 对比度机器视觉应用的照明的最重要的任务就是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特
文献综述
文献综述 随着社会经济的发展,企业所面临的外部经营环境发生了明显的变化。战略管理和项目管理作为应对变化的有效手段被越来越多的企业所采用,同时,随着企业规模的扩大,项目的数量和规模急剧扩增,企业中的项目越来越多,企业在面临众多项目而资源有限的情况下,如何组织好、协调好多个项目,同时又要使其与企业战略目标一致成为亟待解决的问题。项目组合管理架起了战略管理与项目管理的桥梁,它是帮助实现项目与企业战略相结合的有效理论和工具。 1 项目组合管理理论 项目组合管理要对每一个项目进行商业价值和利益的评判,集合成项目组合的战略价值,去实现一定的组织目标和利益,项目组合不再是简单的进行多个项目的管理[1]。 项目组合管理是将一系列项目纳入到同一个组合当中,这个组合有独立的项目组合评审报告记录了各个项目的目标、成本、时限、专业技术水平、资源、风险和其他的关键因素。然后项目执行主管便能从整体上把握该组合,恰当地配置资源和调整项目,以使部门的利益回报最大化[2]。 项目组合管理是将单个项目、活动和所需资源与公司战略相联系的过程,从而确保投入的有限资源具有最高的价值和最低的风险。此外,这个过程允许贯穿整个组织的战略沟通,进而更好的选择和执行那些支持公司战略的项目和活动,同时剔除那些劣质项目[3]。 项目组合管理是对项目集进行选择、评价、策划、实施、管理的有效过程[4]。 PMI对组合管理的定义为[5]: 项目组合管理不是简单地管理多个项目,每个项目组合都需要根据自身的商业价值和公司战略来评价,并且要实现一定的商业目标或商业利益。 PMBOK2004这样定义项目组合 组织依据其具体的目标来管理项目组合。项目组合管理的目标之一
利用姿态约束的并联机器人运动学标定方法
第42卷 第12期2008年12月 西 安 交 通 大 学 学 报 J OU RNAL O F XI′AN J IAO TON G U N IV ERSIT Y Vol.42 №12 Dec.2008 利用姿态约束的并联机器人运动学标定方法 任晓栋1,2,冯祖仁1,2,苏承平1,2 (1.西安交通大学系统工程研究所,710049,西安;2.西安交通大学机械制造系统工程国家重点实验室,710049,西安) 摘要:为了提高并联机器人运动精度,提出了一种利用姿态约束的运动学标定方法.借助一个双轴倾角仪,建立了机器人末端2个姿态角恒定约束,根据这种约束构造了相应的辨识模型和标定算法.标定算法得益于倾角仪重复精度和分辨率高于位置精度的特点,不受其位置精度和量程的限制,同时可避免施加机械约束给并联机器人主动关节带来特殊要求.仿真计算表明,在杆长测量精度为2μm、倾角仪重复精度为01001°的条件下,经过标定后并联机器人的位置精度可达011mm,姿态精度可达0101°. 关键词:姿态约束;运动学标定;并联机器人 中图分类号:TP24212 文献标志码:A 文章编号:02532987X(2008)1221445205 Method for Kinematic C alibration of Parallel Robots Using Orientation Constraint REN Xiaodong1,2,FEN G Zuren1,2,SU Chengping1,2 (1.Systems Engineering Institute,Xi′an Jiaotong University,Xi′an710049,China;2.State Key Laboratory of Manufacturing Systems Engineering,Xi′an Jiaotong University,Xi′an710049,China) Abstract:A new calibration met hod using orientation constraint is p resented to improve t he accu2 racy of parallel robot s.Wit h t he use of a commercial biaxial inclinometer,two attit ude angles of t he end2effecter are kept constant at different measurement configurations.The corresponding calibration algorit hm is built t hrough t he orientation constraint.Instead of positioning accuracy, repeatability and resolution of t he inclinometer are used to const ruct t he orientation const raint, and t he measurement range of t he inclinometer has no effect on t he calibration met hod.Moreo2 ver,t he act uators of t he parallel robot s do not need to operate in passive mod because t he orienta2 tion const raint is not const ructed by t he mechanical locking device.Simulation result s show t hat t he po sition accuracy and t he orientation accuracy reach0.1mm and0101°,respectively,wit h measurement p recision on leg lengt hs of2μm and repeatability on inclinometer of01001°. K eyw ords:orientation const raint;kinematic calibration;parallel robot s 精度是评价并联机器人工作性能的一项重要指标.运动学标定通过准确辨识机器人的机构参数来修正控制器中的模型参数,能够在不增加并联机器人制造成本的条件下,有效提高运动精度. 现有的并联机器人运动学标定方法可以分为外部标定法和自标定法2大类.外部标定法需要借助外部传感器直接或者间接地检测末端位姿信息全集[1]或者子集[224].这类方法原理简单,但要获取高精度的位姿信息非常困难,通常需要借助代价昂贵的检测设备.自标定方法则无需检测末端位姿信息,通常根据机器人内部冗余传感器的输出[5]或者利用由机械装置产生的运动约束来构造相应的辨识模型[627],但缺点是内部传感器的安装无法适用于已经建造的机构,而施加机械约束通常需要机器人的主 收稿日期:2008204221. 作者简介:任晓栋(1979-),男,博士生;冯祖仁(联系人),男,教授,博士生导师. 基金项目:国家重点基础研究发展规划资助项目(2007CB311006);国家高技术研究发展计划资助项目(2006AA04Z222).
机器视觉行业市场调研报告
机器视觉 市场调研报告 营业部:李凯丽 2015年9月2日
机器视觉技术是一项新兴产业,自起步发展至今,机器视觉在中国经历了三个发展阶段,其功能以及应用范围随着工业自动化的发展也在逐渐完善和推广。而在世界范围内,机器视觉已经为人类解决了许多重大问题,由于机器视觉自身领域的特点,目前应用于工业、农业、交通运输业、新兴行业等多领域,创造了人工无法比拟的经济和社会价值。本文从机器视觉的发展、机器视觉的应用领域、竞争状态、市场规模和预测等多方面,调研了机器视觉行业的发展状态,为公司投资机器视觉领域提供了参考依据。 关键词:机器视觉、市场规模、竞争、前景
第一章机器视觉发展背景 (3) 1.1 机器视觉综述 (3) 1.1.1 机器视觉定义及组成 (3) 1.1.2 行业发展阶段 (5) 1.1.3 机器视觉特点及应用优点 (6) 1.2 机器视觉行业发展特性 (7) 1.3 产业链分析 (8) 1.4 行业发展环境分析 (9) 1.4.1 行业政策环境 (9) 1.4.2 行业技术环境分析 (10) 第二章国际机器视觉行业发展趋势和现状 (11) 2.1 市场发展规模 (11) 2.1.1 产业发展历程 (11) 2.1.2 应用现状分析 (12) 2.1.3 产业市场规模和格局 (13) 2.2 行业分布状况和发展趋势 (14) 2.2.1 产业地区分布情况 (14) 2.2.2 发展趋势预测 (16) 第三章中国机器视觉行业的发展现状和趋势 (18) 3.1 发展现状及市场规模 (18) 3.1.1 产业发展历程 (18) 3.1.2 市场规模 (19) 3.2 行业竞争现状 (21) 3.2.1 行业竞争主体 (21) 3.2.2 企业分布状况 (26) 3.3 发展趋势 (27) 第四章机器视觉的应用 (29) 4.1 应用领域分布 (29) 4.2 机器视觉在各行业的应用情况 (30) 4.2.1 在工业领域中的应用 (30) 4.2.2 在农业领域中的应用 (34) 4.2.3 在医药行业中的应用 (36) 4.2.4 在交通领域中的应用 (37) 第五章机器视觉行业发展前景与投资建议 (39) 5.1 发展前景及进入壁垒 (39) 5.2 投资机会和风险 (41)
外文资料翻译--应用坐标测量机的机器人运动学姿态的标定翻译-精品
毕业设计(论文)外文资料翻译 系部:机械工程系 专业:机械工程及自动化 姓名: 学号: 外文出处:The Internation Journal of Advanced (用外文写) Manufacturing Technology 附件: 1.外文资料翻译译文;2.外文原文。 指导教师评语: 签名: 年月日注:请将该封面与附件装订成册。
附件1:外文资料翻译译文 应用坐标测量机的机器人运动学姿态的标定 这篇文章报到的是用于机器人运动学标定中能获得全部姿态的操作装置—— 坐标测量机(CMM)。运动学模型由于操作器得到发展, 它们关系到基坐标和工件。工件姿态是从实验测量中引出的讨论, 同样地是识别方法学。允许定义观察策略的完全模拟实验已经实现。实验工作的目的是描写参数辨认和精确确认。用推论原则的那方法能得到在重复时近连续地校准机器人。 关键字:机器人标定坐标测量参数辨认模拟学习精确增进 1. 前言 机器手有合理的重复精度(0.3毫米)而知名, 但仍有不好的精确性(10.0 毫米)。为了实现机器手精确性,机器人可能要校准也是好理解。在标定过程中,几个连续的步骤能够精确地识别机器人运动学参数,提高精确性。这些步骤为如下描述: 1 操作器的运动学模型和标定过程本身是发展,和通常有标准运动学模型的工具实现的。作为结果的模型是定义基于厂商的运动学参数设置错误量, 和识别未知的,实际的参数设置。 2 机器人姿态的实验测量法(部分的或完成) 是拿走为了获得从联系到实际机 器人的参数设置数据。 3 实际的运动学参数识别是系统地改变参数设置和减少在模型阶段错误量的 定义。一个接近完成辨认由分析不同中间姿态变量P和运动学参数K的微分关系决定: 于是等价转化得: 两者择一, 问题可以看成为多维的优化问题,这是为了减少一些定义的错误功能到零点,运动学参数设置被改变。这是标准优化问题和可能解决用的众所周知的方法。
机器视觉系统设计五大难点【详解】
机器视觉系统设计五大难点 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 机器视觉系统的组成 机器视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三维世界的识别。按现在的理解,人类视觉系统的感受部分是视网膜,它是一个三维采样系统。三维物体的可见部分投影到网膜上,人们按照投影到视网膜上的二维的像来对该物体进行三维理解。所谓三维理解是指对被观察对象的形状、尺寸、离开观察点的距离、质地和运动特征(方向和速度)等的理解。 机器视觉系统的输入装置可以是摄像机、转鼓等,它们都把三维的影像作为输入源,即输入计算机的就是三维管观世界的二维投影。如果把三维客观世界到二维投影像看作是一种正变换的话,则机器视觉系统所要做的是从这种二维投影图像到三维客观世界的逆变换,也就是根据这种二维投影图像去重建三维的客观世界。 机器视觉系统主要由三部分组成:图像的获取、图像的处理和分析、输出或显示。 近80%的工业视觉系统主要用在检测方面,包括用于提高生产效率、控制生产过程中的产品质量、采集产品数据等。产品的分类和选择也集成于检测功能中。下面通过一个用于生产线上的单摄像机视觉系统,说明系统的组成及功能。 视觉系统检测生产线上的产品,决定产品是否符合质量要求,并根据结果,产生相应的信号输入上位机。图像获取设备包括光源、摄像机等;图像处理设备包括相应的
软件和硬件系统;输出设备是与制造过程相连的有关系统,包括过程控制器和报警装置等。数据传输到计算机,进行分析和产品控制,若发现不合格品,则报警器告警,并将其排除出生产线。机器视觉的结果是CAQ系统的质量信息来源,也可以和CIMS 其它系统集成。 图像的获取 图像的获取实际上是将被测物体的可视化图像和内在特征转换成能被计算机处理的一系列数据,它主要由三部分组成: *照明 *图像聚焦形成 *图像确定和形成摄像机输出信号 1、照明 照明和影响机器视觉系统输入的重要因素,因为它直接影响输入数据的质量和至少30%的应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。 过去,许多工业用的机器视觉系统用可见光作为光源,这主要是因为可见光容易获得,价格低,并且便于操作。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。但是,这些光源的一个最大缺点是光能不能保持稳定。以日光灯为例,在使用的第一个100小时内,光能将下降15%,随着使用时间的增加,光能将不断下降。因此,如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。 另一个方面,环境光将改变这些光源照射到物体上的总光能,使输出的图像数据存在噪声,一般采用加防护屏的方法,减少环境光的影响。