相异步电动机不同启动方式
情况下的波形图
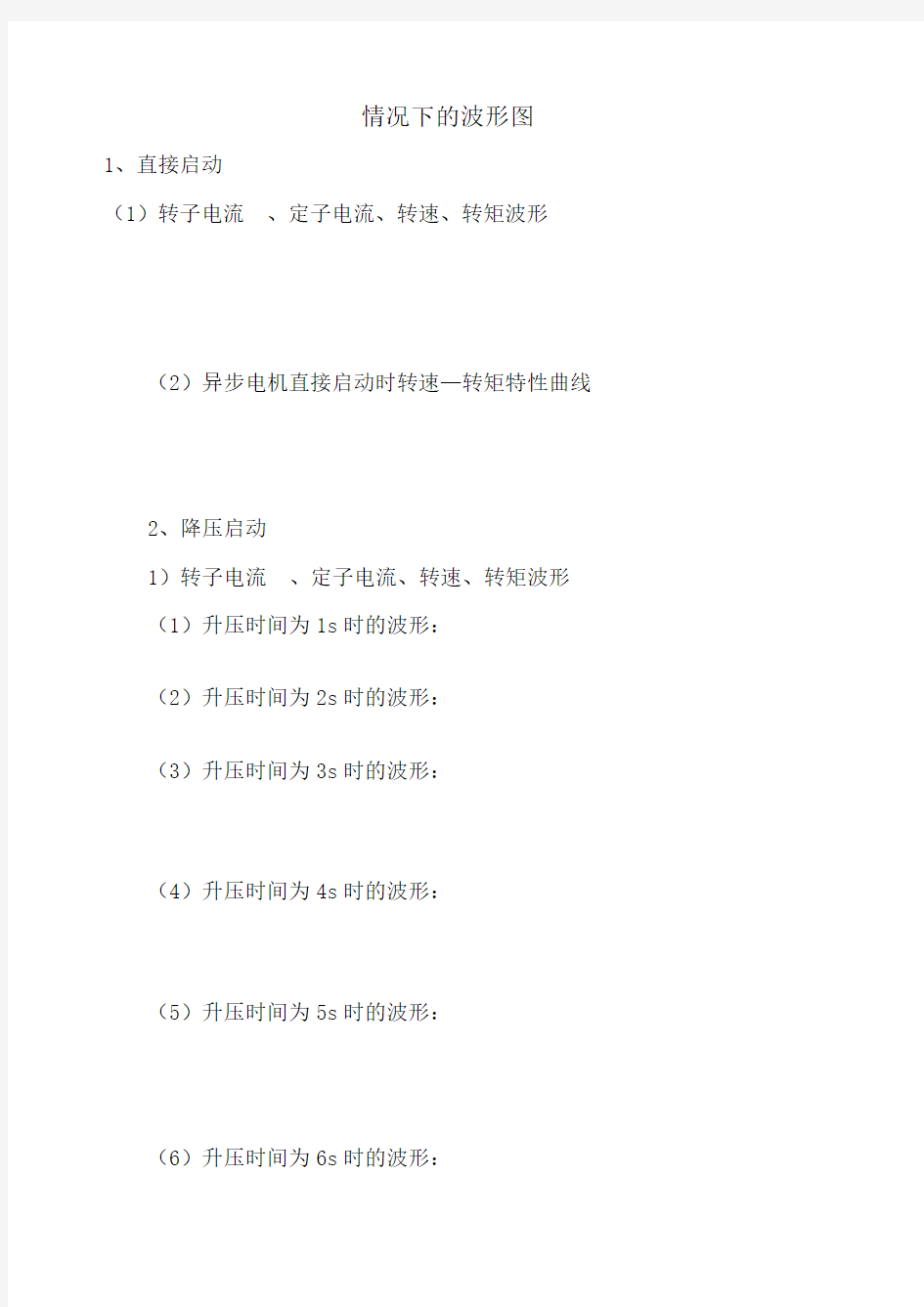
1、直接启动
(1)转子电流、定子电流、转速、转矩波形(2)异步电机直接启动时转速—转矩特性曲线
2、降压启动
1)转子电流、定子电流、转速、转矩波形
(1)升压时间为1s时的波形:
(2)升压时间为2s时的波形:
(3)升压时间为3s时的波形:
(4)升压时间为4s时的波形:
(5)升压时间为5s时的波形:
(6)升压时间为6s时的波形:
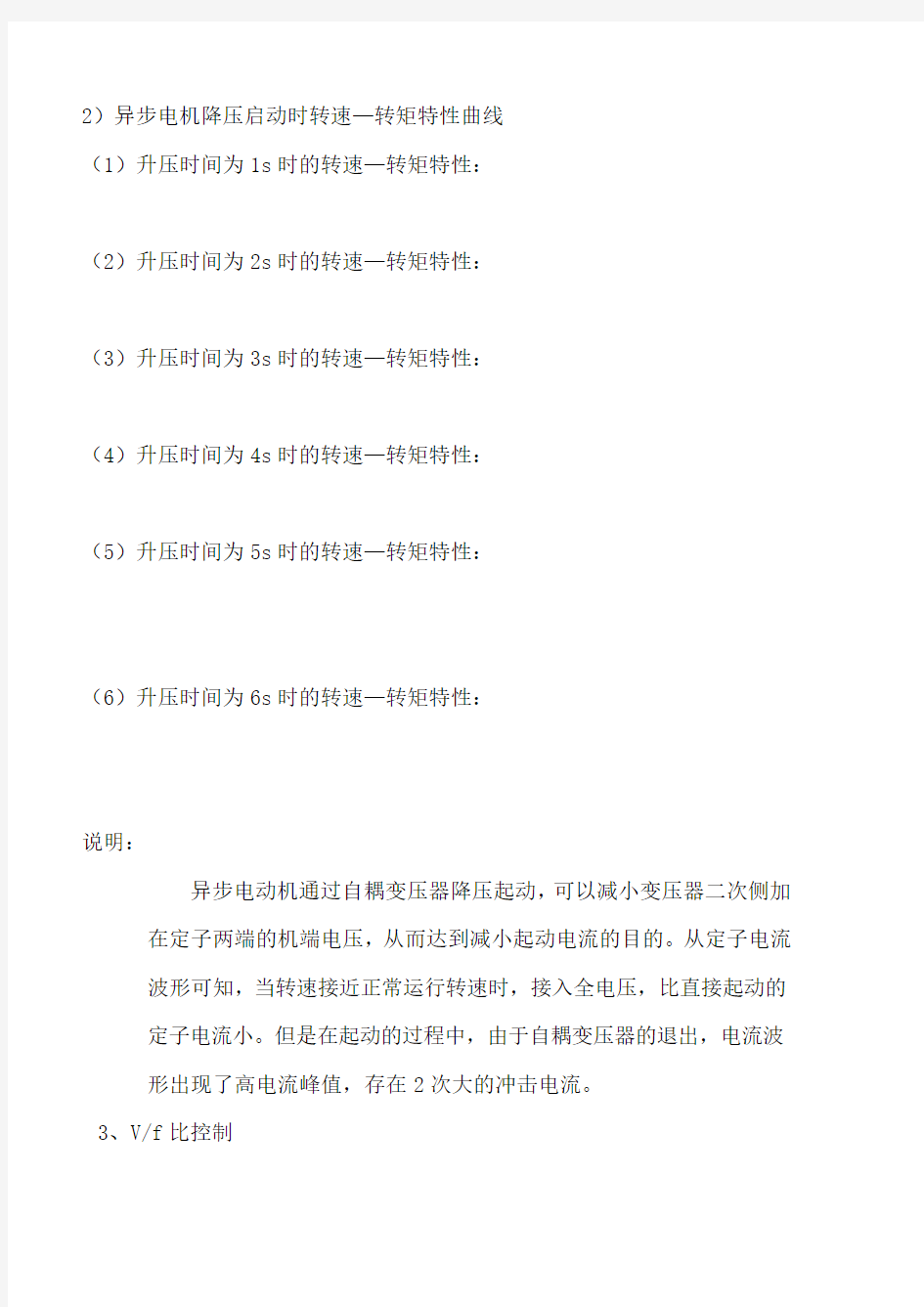
2)异步电机降压启动时转速—转矩特性曲线
(1)升压时间为1s时的转速—转矩特性:
(2)升压时间为2s时的转速—转矩特性:
(3)升压时间为3s时的转速—转矩特性:
(4)升压时间为4s时的转速—转矩特性:
(5)升压时间为5s时的转速—转矩特性:
(6)升压时间为6s时的转速—转矩特性:
说明:
异步电动机通过自耦变压器降压起动,可以减小变压器二次侧加在定子两端的机端电压,从而达到减小起动电流的目的。从定子电流波形可知,当转速接近正常运行转速时,接入全电压,比直接起动的定子电流小。但是在起动的过程中,由于自耦变压器的退出,电流波形出现了高电流峰值,存在2次大的冲击电流。
3、V/f比控制
1)加速(减速)斜率设置为200(-200)时(1)转子电流、定子电流、转速、转矩波形
(2)异步电机V/f比控制起动时转速—转矩特性曲线
2)加速(减速)斜率设置为100(-100)时
(1)转子电流、定子电流、转速、转矩波形
(2)异步电机V/f比控制起动时转速—转矩特性曲线
3)加速(减速)斜率设置为2(-2)时
(1)转子电流、定子电流、转速、转矩波形
(2)异步电机V/f比控制起动时转速—转矩特性曲线
三相异步电动机软启动系统
浅析变频空调技术的发展与应用 摘要 本论文主要是对变频空调的原理、新技术、空调的结构、空调的日常保养进行简 单的分析讨论。变频空调器的最大特点在于其节能、舒适、制热效果好。从节能方面 来说,随着技术的发展与成熟,变频空调器已由最初的交流变频空调器、直流变频空 调器发展到现在pam(脉冲调幅)空调器。变频空调之所以有这么大的优势也是在于 它自身无可比拟的优点,简单的介绍其优点主要是:采用低频启动,启动电流小对电 网的干扰小,省电节能;能快速制冷、制暖;启动后长期运转温度控制精度可达到 ±0.5℃。 关键词:新技术变频发展应用 Abstract This paper is the principle of frequency conversion air-conditioning, newtechnologies,then structure of air- conditioning,air-conditioning maintenance to carry out simple day-to-day art an analysis of the discussion.The most important feature of variable frequency air conditioner in its energy-saving,comfortable, good heating effect. From the energy point of view,as the technolog development and maturity,frequency conversion air-conditioner from the original A inverter air conditioner,Dc inverter air conditioner developed to pam air conditioner.Inverter air conditioner advantages:the use of low-frequency start,starting current of the power system small disturbance small,energy-saving power;fast refrigeration,heating System;start functioning after the long-term temperature control precision can reach ± 0.5℃. Key words:new technology frequency conversion development application 目录 摘要 (1)
三相异步电机的转矩特性与机械特性(精)
三相异步电机的转矩特性与机械特性 1.电磁转矩(简称转矩) 异步电动机的转矩T 是由旋转磁场的每极磁通Φ与转子电流I 2相互作用而产生的。电磁转矩的大小与转子绕组中的电流I 及旋转磁场的强弱有关。 经理论证明,它们的关系是: 22cos T T K I ?=Φ (5-4) 其中 T 为电磁转矩 K T 为与电机结构有关的常数 Φ为旋转磁场每个极的磁通量 I 2为转子绕组电流的有效值 ?2为转子电流滞后于转子电势的相位角 若考虑电源电压及电机的一些参数与电磁转矩的关系,(5-4)修正为: 22122220()T sR U T K R sX '=+ (5-5) 其中 T K '为常数 U 1为定子绕组的相电压 S 为转差率 R 2为转子每相绕组的电阻 X 20为转子静止时每相绕组的感抗 由上式可知,转矩T 还与定子每相电压U 1的平方成比例,所以当电源电压有所变动时,对转矩的影响很大。此外,转矩T 还受转子电阻R 2的影响。图4-15为异步电动机的转矩特性曲线。 2.机械特性曲线 图 5-5 三相异步电动机的机械特性曲线 在一定的电源电压U 1和转子电阻R 2下,电动机的转矩T 与转差率n 之间的n n m (a) T =f (s )曲线
关系曲线T=f(s)或转速与转矩的关系曲线n=f(T),称为电动机的机械特性曲线,它可根据式(5-4)得出,如图5-5所示。 在机械特性曲线上我们要讨论三个转矩: 1).额定转矩T N 额定转矩T N 是异步电动机带额定负载时,转轴上的输出转矩。 29550N P T n = (5-6) 式中P 2是电动机轴上输出的机械功率,其单位是瓦特,n 的单位是转/分,T N 的单位是牛·米。 当忽略电动机本身机械摩擦转矩T 0时,阻转矩近似为负载转矩T L ,电动机作等速旋转时,电磁转矩T 必与阻转矩T L 相等,即T = T L 。额定负载时,则有T N = T L 。 2).最大转矩T m T m 又称为临界转矩,是电动机可能产生的最大电磁转矩。它反映了电动机的过载能力。 最大转矩的转差率为S m ,此时的S m 叫做临界转差率,见图5-5(a ) 最大转矩Tm 与额定转矩T N 之比称为电动机的过载系数λ,即 λ= Tm / T N 一般三相异步的过载系数在1.8~2.2之间。 在选用电动机时,必须考虑可能出现的最大负载转矩,而后根据所选电动机的过载系数算出电动机的最大转矩,它必须大于最大负载转矩。否则,就是重选电动机。 3).起动转矩T st , T st 为电动机起动初始瞬间的转矩,即n=0,s =1时的转矩。 为确保电动机能够带额定负载起动,必须满足:T st >T N ,一般的三相异步电动机有T st /T N =1~2.2。 3.电动机的负载能力自适应分析 电动机在工作时,它所产生的电磁转矩T 的大小能够在一定的范围内自动调整以适应负载的变化,这种特性称为自适应负载能力。 2 L T n S I T ↑?↓?↑?↑?↑直至新的平衡。此过程中,2I ↑时,1 I ↑? 电源提供的功率自动增加。
三相异步电动机软启动器的设计
第2期(总第165期) 2011年4月机械工程与自动化 M ECHAN IC AL EN GIN EERIN G & A U TO M A T IO N N o.2 Apr. 文章编号:1672-6413(2011)02-0144-02 三相异步电动机软启动器的设计 刘芳霞 (山东经贸职业学院,山东 潍坊 261011) 摘要:三相异步电动机直接启动时,启动电流过大,转矩较小,给用电设备及电网带来了一定的影响。通过采用模糊控制与P LC 相结合的方法实现了电机的软启动,给出了软启动控制系统的硬件设计与软件设计,并用M A T L A B 软件进行实验仿真,实验结果验证了系统的有效性及理论的正确性。关键词:软启动;三相异步电动机;仿真中图分类号: T M 343+ .2 文献标识码: A 收稿日期: 2010-08-31;修回日期: 2010-10-27 作者简介:刘芳霞(1975-),女,山东聊城人,讲师,硕士。 0 引言 三相异步电动机以其低成本、高可靠性和易维护等特点,在电力拖动系统中得到了广泛的应用。但在其直接启动瞬间启动电流大约是额定电流的6倍,带负载启动时甚至达到8倍。大的启动电流会给电网及用电设备带来很大的负面影响,使电网电压产生波动,加速电动机绕组的绝缘老化,大大降低了电动机的使用寿命,导致大量的能量被消耗。针对上述问题,本文设计了一个软启动系统,给出了其硬件设计及软件设计,并通过实验验证了系统的有效性及理论的正确性。1 电机软启动系统结构 三相电动机软启动系统结构图见图1。采用晶闸管反并联电路给电动机定子提供电源,通过控制晶闸管触发角的大小来改变导通角的大小,使电动机电压平稳增加,从而调节电动机定子的端电压,使电动机的启动电流缓慢上升,减少电流对电网及电动机的影响,这一过程称为软启动。软启动的实现方法如下:通过对电路电压、电流的检测,将检测的信号模糊处理,经过A /D 模块转化为数字信号,送入PLC 控制器进行处理,用得到的信号来控制晶闸管的触发角,从而控制电动机的端电压,达到控制启动电流的目的 。 图1 三相电动机软启动结构图 2 软启动控制电路硬件设计 软启动器是一种交流调压装置,在本系统中主要是实现电机的软启动、停机及保护等多种功能。由于PLC 具有可靠性高、抗干扰能力强、功能完善、编程 简单、具有网络通讯功能等特点,所以本系统采用松下电工FP0系列可编程控制器作为主控制器,PLC 结构框图如图2所示。它的主要作用是:将模糊化处理得到的信号经过A /D 模块转化保存在数据寄存器中,
三相异步电动机的机械特性
三相异步电动机的机械特性 (一)机械特性方程 1)物理表达式:T=CTФmI2’ cosф2 (T是电磁作用的结果) 2)参数表达式: 3) 工程表达式: ——外施电源电压; ——电源频率; ——电机定子绕组参数; ——电机转子绕组参数。 (二)固有机械特性曲线 1.形状(根据工程表达式来说明) AB段(s较大):为双曲线,T与S成反比。 BO段(s很小):为直线,T与S 成正比。
2.起动点A,n=0,S=1, 起动转矩倍数KT=TS/TN 一般取0.8~1.8 3.临界点B 临界转差率只与转子电阻有关. 取0.1~0.2 最大转矩与电源电压UI2有关。 过载能力λ=Tm/TN 取1.6~2.2 4.同步点O n=n1 T=0 (理想的空载转速,旋转磁场的转速 ) 5.额定点C 0< SN 2、转子串电阻的人为机械特性——“变软” 当转子回路串电阻时,同步点不变,Sm与转子电阻成正比,转速随电阻增加而减小,最大转矩Tm保持不变,在一定范围内起动转矩有所增加,其特性曲线(红色)所示 3、降低定子电压频率的人为机械特性——“变小” 降低定子电压频率时,同步转速随之下降,从而使得电机转速下降,但特性的硬度基本保持不变。 电动机在工作时要求主磁通保持不变,因此在降低频率的同时,定子电压也要随之降低。 三相异步电动机的优缺点 1、三相异步电动机的优点 三相异步电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而产生感生电动势和电流,并与磁场相互作用产生电磁转矩,实现能量变换。与单相异步电动机相比,三相异步电动机运行性能好,并可节省各种材料。按转子结构的不同,三相异步电动机可分为笼式和绕线式两种。笼式转子的异步电动机结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用,其主要缺点是调速困难。绕线式三 相异步电动机的转子和定子一样也设置了三相绕组并通过滑环、电刷与外部变阻器连 接。调节变阻器电阻可以改善电动机的起动性能和调节电动机的转速。 2、异步电动机存在的缺点 2.1笼型感应电动机存在下列三个主要缺点。 (1)起动转矩不大,难以满足带负载起动的需要。当前社会上解决该问题的多数办法是提高电动机的功率容量(即增容)来提高其起动转矩,这就造成严重的“大马拉小车”,既增加购买设备的投资,又在长期的应用中因处于低负荷运行而浪费大量电量,很不经济。第二种办法是增购液力偶合器,先让电动机空载起动,在由液力偶合器驱动负载。这种办法同样要增加添购设备的投资,并因液力偶合器的效率低于97%,因此至少浪费3%的电能,因而整个驱动装置的效率很低,同样浪费电量,更何况添加液力偶合器之后,机组的运行可靠性大大下降,显著增加维护困难,因此不是一个好办法。 (2)大转矩不大,用于驱动经常出现短时过负荷的负载,如矿山所用破碎机等时,往往停转而烧坏电动机。以致只能在轻载状况下运行,既降低了产量又浪费电能。 (3)起动电流很大,增加了所需供电变压器的容量,从而增加大量投资。另一办法是采用降压起动来降低起动电流,同样要增加添购降压装置的投资,并且使本来就不好的起动特性进一步恶化。 2.2 绕线型感应电动机 绕线性感应电动机正常运行时,三相绕组通过集电环短路。起动时,为减小起动电流,转子中可以串入起动电阻,转子串入适当的电阻,不仅可以减小起动电流,而且由于转子功率因数和转子电流有功分量增大,起动转矩也可增大。这种电动机还可通过改 变外串电阻调速。绕线型电动机虽起动特性和运行特性兼优,但仍存在下列缺点:)由于转子上有集电环和电刷,不仅增加制造成本,并且降低了起动和运行的可 三相异步电动机软启动装置设计 考生姓名:XXXXXXX 准考证号:XXXXXXXXXX 专业层次:XXXXXXX 院(系):XXXXXXXXXXXX 指导教师:XXXXXXX 职称:XXXXXXX 二O一二年七月二十日 三相异步电动机软启动装置设计 考生姓名:XXXXXXXX 准考证号:XXXXXXXXXXXXXX 专业层次:XXXXXXXXXXX 指导教师:XXXXXXXX 院(系):XXXXXXXXXXXXXXXXXXXXXX 二O一二年七月二十日 摘要 三相异步电动机因具有结构简单、制造方便、运行可靠、价格低廉等优点,而广泛应用在工业、农业、交通运输业、国防工业以及其他各行各业中。但它也有明显的缺点,那就是起动转矩小,起动电流过大。这种情况对电机本身及周围电网都有非常不利的影响。为了减小异步电动机起动过程中对电网的冲击、消除传统降压起动设备的有级触点控制对异步电动机的冲击、改善异步电动机的起动特性,本文对基于单片机控制的晶闸管调压软起动器进行讨论。 本文首先阐述了软起动器晶闸管调压电路(即主电路)的工作原理,主要是基于晶闸管的三相异步电动机软启动器主电路设计和触发电路设计。然后是对电动机软启动器模式的设计,但主要还是软起动器的硬件电路设计。 本文设计的软起动器操作方便简单,能够使电机顺利起动。使之能达到了改善三相异步电动机起动性能的要求。在满足异步电动机起动转矩要求及降低起动电流的前提下,使电机能够平稳可靠起动。 关键词:异步电动机,晶闸管,软启动 Three phase asynchronous motor soft start device design ABSTRACT The three-phase asynchronous motor because of its simple structure, convenient manufacture, reliable operation, low price and the like, and is widely applied in industry, agriculture, transportation, defense industry and other industries. But it also has obvious shortcomings, the starting torque is small, large starting current. This situation on the motor itself and the surrounding network has very adverse effect. In order to reduce the asynchronous motor starting process of the impact of power grid, the elimination of the traditional step-down start equipment with level control for asynchronous motor to improve impact, induction motor, this paper based on single-chip microcomputer controlled thyristor voltage soft starter were discussed. This article first elaborated the soft starter thyristor voltage regulating circuit (i.e., working principle, main circuit) is mainly based on thyristor three-phase asynchronous motor soft starter the design of main circuit and trigger circuit design. The electric motor soft starter in model design, but mainly the hardware circuit design of soft starter. In this paper, the design of the soft starter of convenient and simple 异步电动机几种启动方式的介绍 电动机作为重要的动力装置,已被广泛用于工业、农业、交通运输、国防军事设施以及日常生活中。直流电动机其调速在过去一直占统治地位,但由于本身结构原因,例如换向器的机械强度不高,电刷易于磨损等,远远不能适应现代生产向高速大容量化发展的要求。而交流电动机,特别是三相鼠笼式异步电动机,由于其结构简单、制造方便、价格低廉,而且坚固耐用,惯量小,运行可靠等优势,在工业生产中得到了极广泛的应用,也正在发挥着越来越重要的作用。 1 软启动的现状与各种启动方式的比较 交流电动机和直流电动机相比存在许多优点,但当异步电机在起动过程中又有许多弊病。所谓起动过程是在交流传动系统中,当异步电动机投入电网时,其转速由零开始上升,转速升到稳定转速的全过程。 如不采用任何起动装置的情况下,直接加额定电压到定子绕组起动电动机时,电机的起动电流可达额定电流的4倍~8倍,其转速也在很短时间内由零上升到额定转速。同时三相感应电动机起动时的转矩冲击较大,一般可达额定转矩的2倍以上。起动时过高的电流一方面会造成严重的电网冲击,给电网造成过大的电压降落,降低电网电能质量并影响其他设备的正常运行。而过大的转矩冲击又将造成机械应力冲击,影响电动机本身及其拖动设备的使用寿命。因此,通常总是力求在较小的起动电流下得到足够大的起动转矩,为此就要选择合适的起动方法。在选择起动方法时可以根据具体情况具体要求来选择。 对三相鼠笼式异步电动机的起动电流的限制,通常有定子串接电抗器起动、Y-△起动、自藕变压器降压起动、延边三角形起动。而对绕线式交流电动机,常采用转子串接频敏变阻器起动、定子串电阻分级起动。这些传统的起动方法都存在一些问题。 (1)定子串接电阻起动:由于外串了电阻,在电阻上有较大的有功损耗,特别对中型、大型异步电动机更不经济,因此在降低了起动电流的同时,却付出了较大的代价,即起动转矩降低得更多,一般只能用于空载和轻载。 (2)Y—△起动:Y—△起动方法虽然简单,只需一个Y—△转换开关。但是Y—△起动的电动机定子绕组六个出线端都要引出来,对于高电压的电动机有一定的困难,一般只用于380V电动机。 (3)自耦变压器降压起动:自耦变压器降压起动,与定子串接电抗器起动相比,当限定的起动电流相同时,起动转矩损失的较少;比起Y—△起动,有几种抽头供选用比较灵活,并可以拖动较大些的负载起动。但是自耦变压器体积大,价格高,也不能拖动重负载起动。 三相异步电动机的运行特性 摘要:本章介绍了三相异步电动机的机械特性的三个表达式。固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用 5.1三相异步电动机的运行特性 三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩 与转子转速之间的关系。由于转子转速与同步转速、转 差率存在下列关系,即 (5.1) 则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速 和转差率,横坐标表示电磁转矩。 三相异步电动机的机械特性有三种表达式,现介绍如下: 5.1.1机械特性的物理表达式 由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为 (5.2)式中为三相异步电动机的转矩系数,是一常数; 为三相异步电动机的气隙每极磁通量; 为转子电流的折算值; 为转子电路的功率因数; 式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。 仅从式(5.2)不能明显地看出电磁转矩 与转差率之间的变化规 律。要从分析气隙每极磁通量,转子相电流,以及为转子功率 因数与转差率之间的关系,间接地找出其变化规律。现分析如表5.1所示。 根据表5.1中的分析,可作出曲线、和 分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲 线。曲线分为两段:当较小时(),变化不大,, 与转子相电流成正比关系,表现为AB段近似为直线, 电磁转矩 较大时 (),如,减少近一 称为直线部分;当 半,很小,尽管转子相电流增大,有功电 不大,使电磁转矩反而减小了,此时表现为段, 流 段为曲线段,称为曲线部分。由此分析知,三相异步电动机的机械特下,产生最大转矩,即点称为最大转矩点,相应的 性在某转差率 转矩为 称为最大转矩,对应的转差率称为临界转差率。 5.1.2机械特性的参数表达式 1.参数表达式的推导: 10.3 节 一、填空题 1、异步电动机的电磁转矩是由和共同作用产生的。 2、三相异步电动机最大电磁转矩的大小与转子电阻r2 值关,起动转矩的大小与转子电阻r2 关。 (填有无关系) 3、一台线式异步电动机带恒转矩负载运行,若电源电压下降,则电动机的旋转磁场转速,转差率,转速,最大电磁转矩,过载能力,电磁转矩。 4、若三相异步电动机的电源电压降为额定电压的0.8 倍,则该电动机的起动转矩T st =?T stN 。 5、一台频率为f1= 60Hz 的三相异步电动机,接在频率为50Hz 的电源上(电压不变),电动机的最大转矩为原来的,起动转矩变为原来的。 6、若异步电动机的漏抗增大,则其起动转矩,其最大转矩。 7、绕线式异步电动机转子串入适当的电阻,会使起动电流,起动转矩。 二、选择题 1、设计在f1= 50Hz 电源上运行的三相异步电动机现改为在电压相同频率为60Hz 的电网上,其电动机的()。 (A)T st 减小,T max 减小,I st 增大(B)T st 减小,T max 增大,I st 减小 (C)T st 减小,T max 减小,I st 减小(D)T st 增大,T max 增大,I st 增大 2、适当增加三相绕线式异步电动机转子电阻r2时,电动机的()。 (A)I st 减少, T st 增加, T max 不变, s m 增加(B)I st 增加, T st 增加, T max 不变, s m 增加 (C)I st 减少, T st 增加, T max 增大, s m 增加(D)I st 增加, T st 减少, T max 不变, s m 增加 3、一台运行于额定负载的三相异步电动机,当电源电压下降10%,稳定运行后,电机的电磁转矩()。(A)T em =T N (B)T em = 0.8T N (C)T em = 0.9T N (D)T em >T N 4、一台绕线式异步电动机,在恒定负载下,以转差率s 运行,当转子边串入电阻r = 2r2',测得转差率将为 ()(r 已折算到定子边)。 (A)等于原先的转差率s (B)三倍于原先的转差率s (C)两倍于原先的转差率s (D)无法确定 5、异步电动机的电磁转矩与( )。 (A)定子线电压的平方成正比;(B)定子线电压成正比; (C)定子相电压平方成反比;(D)定子相电压平方成正比。 6、一般电动机的最大转矩与额定转矩的比值叫过载系数,一般此值应( )。 (A)等于1 (B)小于1 (C)大于1 (D)等于0 三、问答题 异步电动机软启动分析 电动机作为重要的动力装置,已被广泛用于工业、农业、交通运输、国防军事设施以及日常生活中。直流电动机其调速在过去一直占统治地位,但由于本身结构原因,例如换向器的机械强度不高,电刷易于磨损等,远远不能适应现代生产向高速大容量化发展的要求。而交流电动机,特别是三相鼠笼式异步电动机,由于其结构简单、制造方便、价格低廉,而且坚固耐用,惯量小,运行可靠等优势,在工业生产中得到了极广泛的应用,也正在发挥着越来越重要的作用。 一、软启动的现状 交流电动机和直流电动机相比存在许多优点,但当异步电机在起动过程中又有许多弊病。所谓起动过程是在交流传动系统中,当异步电动机投入电网时,其转速由零开始上升,转速升到稳定转速的全过程。如不采用任何起动装置的情况下,直接加额定电压到定子绕组起动电动机时,电机的起动电流可达额定电流的4~8倍,其转速也在很短时间内由零上升到额定转速。同时三相感应电动机起动时的转矩冲击较大,一般可达额定转矩的两倍以上。起动时过高的电流一方面会造成严重的电网冲击,给电网造成过大的电压降落,降低电网电能质量并影响其他设备的正常运行。而过大的转矩冲击又将造成机械应力冲击,影响电动机本身及其拖动设备的使用寿命。因此,通常总是力求在较小的起动起动电流下得到足够大的起动转矩,为此就要选择合适的起动方法。在选择起动方法时可以根据具体情况具体要求来选择。 对三相鼠笼式异步电动机的起动电流的限制,通常有定子串接电抗器起动、Y-△起动、自藕变压器将压起动、延边三角形起动。而对绕线式交流电动机,常采用转子串接频敏变阻器起动、转子串电阻分级起动。但这些传统的起动方法都存在一些问题。 1.定子串接电阻起动:由于外串了电阻,在电阻上有较大的有功损耗,特别对中型、大型异步电动机更不经济,因此在降低了起动电流的同时、却付出了较大的代价- 起动转矩降低得更多,一般只能用于空载和轻载。 2.Y-△起动:丫-△起动方法虽然简单,只需一个Y-△转换开关。但是Y-△起动的电动机定子绕组六个出线端都要引出来,对于高电压的电动机有一定的困难,一般只用于△接法380v电动机。 3.自祸变压器将压起动:自祸变压器将压起动,比起定子串接电抗器起动,当限定的起动电流相同时,起动转矩损失的较少;比起卜△起动,有几种抽头供选用比较灵活,并且巩/峨较大时,可以拖动较大些的负载起动。但是自祸变压器体积大,价格高,也不能拖动重负载起动。 4.延边三角形起动:采用延边三角形起动鼠笼式异步电动机,除了简单的绕组接线切换装置之外,不需要其他专用起动设备。但是,电动机的定子绕组不但为△接,有抽头,而且需要专门设计,制成后抽头又不能随意变动。 随着电力技术(尤其是集成电路、微处理器以及新一代电力电子器件)的不断发展,异步电动机起动过程中的起动电流过高,起动转矩过小等问题得到了很好的解决。 从20世纪70年代开始推广利用晶闸管交流调压技术制作的软起动器,以及采用微控制器代替模拟控制电路,发展成为现代的电子软起动器。 二、软启动的特点 电子软起动器相对于传统的起动方式,其突出的优点体现在: 1.电力半导体开关是无电弧开关和电流连续的调节,所以电子软起动器是无级调节的,能够连续稳定调节电机的起动,而传统起动的调节是分档的,即属于有级调节范围。 2.冲击转矩和冲击电流小。软起动器在起动电机时,是通过逐渐增大晶闸管的导通角,使电机起动电流限制在设定值以内,因而冲击电流小,也可控制转矩平滑上升,保护传动机械、设备和人员。 5.1 有一台四极三相异步电动机,电源电压的频率为50H Z,满载时电动机的转差率为0.02求电动机的同步转速、转子转速和转子电流频率。 n0=60f/p S=(n0-n)/ n0 =60*50/2 0.02=(1500-n)/1500 =1500r/min n=1470r/min 电动机的同步转速1500r/min.转子转速1470 r/min, 转子电流频率.f2=Sf1=0.02*50=1 H Z 5.2将三相异步电动机接三相电源的三根引线中的两根对调,此电动机是否会反转?为什么? 如果将定子绕组接至电源的三相导线中的任意两根线对调,例如将B,C两根线对调,即使B相遇C相绕组中电流的相位对调,此时A相绕组内的电流导前于C相绕组的电流2π/3因此旋转方向也将变为A-C-B向逆时针方向旋转,与未对调的旋转方向相反. 5.3 有一台三相异步电动机,其n N=1470r/min,电源频率为50H Z。设在额定负载下运行,试求: ①定子旋转磁场对定子的转速; 1500 r/min ②定子旋转磁场对转子的转速; 30 r/min ③转子旋转磁场对转子的转速; 30 r/min ④转子旋转磁场对定子的转速; 1500 r/min ⑤转子旋转磁场对定子旋转磁场的转速。 0 r/min 5.4当三相异步电动机的负载增加时,为什么定子电流会随转子电流的增加而增加? 因为负载增加n减小,转子与旋转磁场间的相对转速( n0-n)增加,转子导体被磁感线切割的速度提高,于是转子的感应电动势增加,转子电流特增加,.定子的感应电动使因为转子的电流增加而变大,所以定子的电流也随之提高. 5.5 三相异步电动机带动一定的负载运行时,若电源电压降低了,此时电动机的转矩、电流及转速有无变化?如何变化? 若电源电压降低, 电动机的转矩减小, 电流也减小. 转速不变. 5.6 有一台三相异步电动机,其技术数据如下表所示。 试求:①线电压为380V时,三相定子绕组应如何接法? ②求n0,p,S N,T N,T st,T max和I st; ③额定负载时电动机的输入功率是多少? ①线电压为380V时,三相定子绕组应为Y型接法. ②T N=9.55P N/n N=9.55*3000/960=29.8Nm Tst/ T N=2 Tst=2*29.8=59.6 Nm T max/ T N=2.0 T max=59.6 Nm I st/I N=6.5 I st=46.8A 一般n N=(0.94-0.98)n0n0=n N/0.96=1000 r/min SN= (n0-n N)/ n0=(1000-960)/1000=0.04 P=60f/ n0=60*50/1000=3 ③η=P N/P输入 P输入=3/0.83=3.61 5.7三相异步电动机正在运行时,转子突然被卡住,这时电动机的电流会如何变化?对电动机有何影响? 电动机的电流会迅速增加,如果时间稍长电机有可能会烧毁. 三相异步电动机启动方法 降压启动就可以降低启动电流,减少线路压降。除直接启动外,降压启动一般有星-三角降压启动,自藕变压降压启动,变频启动、软启动等。 三相异步电动机接线图 三相异步电机接线图:三相电动机的三相定子绕组每相绕组都有两个引出线头。一头叫做首端,另一头叫末端。规定第一相绕组首端用D 1表示,末端用D 4表示;第二相绕组首端用D2表示,末端用D5表示;第三相绕组首末端分别用D3和D6来表示。这六个引出线头引入接线盒的接线柱上,接线柱相应地标出D1~D6的标记,见图(1)。三相定子绕组的六根端头可将三相定子绕组接成星形或三角形,星形接法是将三相绕组的末端并联起来,即将D4、D5、D6三个接线柱用铜片连结在一起,而将三相绕组首端分别接入三相交流电源,即将D1、D2、D3分别接入A、B、C相电源,如图(2)所示。而三角形接法则是将第一相绕组的首端D 1与第三相绕组的末端D6相连接,再接入一相电源;第二相绕组的首端D2与第一相绕组的末端D4相连接,再接入第二相电源;第三相绕组的首端D3与第二相绕组的末端D5相连接,再接入第三相电源。即在接线板上将接线柱D1和D6、D2和D4、D3和D5分别用铜片连接起来,再分别接入三相电源,如图(3)所示。一台电动机是接成星形还是接成三角形,应视厂家规定而进行,可以从电动机铭牌上查到。三相定子绕组的首末端是生产厂家事先设定好的,绝不可任意颠倒,但可将三相绕组的首末端一起颠倒,例如将三相绕组的末端D4、D5、D6倒过来作为首端,而将D1、D2、D3作为末端,但绝不可单独将一相绕组的首末端颠倒,否则将产生接线错误。如果接线盒中发生接线错误,或者绕组首末端弄错,轻则电动机不能正常起动,长时间通电造成启动电流过大,电动机发热严重,影响寿命,重则烧毁电动机绕组,或造成电源短路。 1、三相电源绕组有几种接线方式?三相负载的连接方式有几种? 答:三相发电机或三相变压器的二次侧都具有三相绕组,它们都是用星Y形或三角△形的方式连接起来的。 三相负载的连接与发电机三相绕组的连接相似,也可接成形或三角形△。 2、什么叫三相三线制电路?什么叫三相四线制电路? 答:将负载与发电机用三根火线连接起来。就是三相三线制电路。 用三根火线和一根中线把电源和负载起来,就是三相四线制电路。 3、什么叫三相电源和负载的星型连接?什么叫相、线电压和相、线电流?他们之间的关系如何? 答:将三相绕级的末端连接在一起,从首端分别引出导线,这就是星形连接。通常三相绕组的始端用A、B、C表示,末端用X、Y、Z表示。绕组始端的引出线称为火线。三个绕组末端连接在一起的公共点“O”称为中性点,从中性点引出的一根导线称为零线(也称中线)。如果中性点接地,则零线也称做地线。 每相组两端间的电压(即每相绕组首端与中线之间的电压)uA、uB、uC叫做相电压。 两根火线之间(即两相之间)的电压uAB、uBC、uCA叫做线电压。 流过电源每相绕组或负载的电流,叫做相电流。火线中的电流iA、iB、iC,叫做线电流。在星形连接中,线电压的有效值是相电压有效值的倍,即U线=U相。线电流等于相电流。 即I线=I相。 4、三相四线制供电系统中,中性线(零线)的作用是什么?为什么零线不允许断路?答:中性线是三相电路的公共回线。中性线能保证三相负载成为三个互不影响的独立回路; 三相异步电动机的机械特 性 The Standardization Office was revised on the afternoon of December 13, 2020 三相异步电动机的运行特性 摘要:本章介绍了三相异步电动机的机械特性的三个表达式。 固有机械特性和人为机械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用 三相异步电动机的运行特性 三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。和直流电动机一样,三相异步电动机的机械特性也是指电磁转矩与转子转速之间的关系。由于转子转速与同步转速 、转差率存在下列关系,即 () 则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩。 三相异步电动机的机械特性有三种表达式,现介绍如下: 机械特性的物理表达式 由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为 () 式中为三相异步电动机的转矩系数,是一常数; 为三相异步电动机的气隙每极磁通量; 为转子电流的折算值; 为转子电路的功率因数; 式()表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因此这一表达式又称为三相异步电动机的物理表达式。 仅从式()不能明显地看出电磁转矩与转差率之间的变化规律。要从分析气隙每极磁通量,转子相电流,以及为转子功 率因数与转差率之间的关系,间接地找出其变化规律。现分析如表所示。 根据表中的分析,可作出曲线、和分别如图、、所示,据此可得出图所示的机械特性曲线。曲线分为两段:当较小时(),变化不大,,电磁转矩 与转子相电流成正比关系,表现为AB段近似为直线,称为直线部分;当较大时 (),如,减少近一 半,很小,尽管转子相电流增大,有功电流不大,使电磁转矩反而减小了,此时表现为段,段为曲线段,称为曲线部分。由此分析知,三相异步电动机的机械特性在某转差率下,产生最大转矩,即点称为最大转矩点,相应的转矩为称为最大转矩,对应的转差率称为临界转差率。 机械特性的参数表达式 1.参数表达式的推导: . . . . 辽宁工业大学 电力电子技术课程设计(论文)题目:三相异步电动机软启动器 院(系): 专业班级: 学号: 学生: 指导教师:(签字) 起止时间 . . . . 课程设计(论文)任务及评语 院(系):电气工程学院教研室:电 气 注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算 摘要 现在传动工程中最常用的就是三相异步电动机。在许多场合,由于其启动特性,这些电机不可以直接连接电源系统。如果直接启动,会产生较高的峰值转矩,这种冲击不但对驱动电机有冲击,而且也会使机械装置受载。而软启动器通过平滑的升高端子电压,可以实现无冲击启动,最佳保护电源系统及电动机。 本文设计的三相异步电动机软启动器主要包括主电路和控制电路两部分。采用电压斜坡软启动,晶闸管脉冲触发,通过对电机启动过程中晶闸管的控制来实现软启动器平滑启动的功能。 关键词:异步电动机;软启动器;晶闸管 目录 第1章绪论 (1) 1.1电力电子技术概况 (1) 1.2本文设计容 (1) 第2章三相异步电动机软启动器电路设计 (2) 2.1三相异步电动机软启动器总体设计方案 (2) 2.2具体电路设计 (3) 2.2.1 主电路设计 (3) 2.2.2 控制电路设计 (4) 2.2.3 触发电路设计 (5) 2.2.4 同步电路设计 (5) 2.2.5 检测电路设计 (6) 2.2.6 保护电路设计 (7) 2.3元器件型号选择 (8) 2.4系统仿真 (9) 2.4.1 MATLAB仿真软件简介 (9) 2.4.2 三相异步电动机软启动器仿真模型建立 (10) 2.4.3 三相异步电动机软启动器仿真波形及数据分析 (10) 第3章课程设计总结 (13) 参考文献 (14) 情况下的波形图 1、直接启动 (1)转子电流、定子电流、转速、转矩波形(2)异步电机直接启动时转速—转矩特性曲线 2、降压启动 1)转子电流、定子电流、转速、转矩波形 (1)升压时间为1s时的波形: (2)升压时间为2s时的波形: (3)升压时间为3s时的波形: (4)升压时间为4s时的波形: (5)升压时间为5s时的波形: (6)升压时间为6s时的波形: 2)异步电机降压启动时转速—转矩特性曲线 (1)升压时间为1s时的转速—转矩特性: (2)升压时间为2s时的转速—转矩特性: (3)升压时间为3s时的转速—转矩特性: (4)升压时间为4s时的转速—转矩特性: (5)升压时间为5s时的转速—转矩特性: (6)升压时间为6s时的转速—转矩特性: 说明: 异步电动机通过自耦变压器降压起动,可以减小变压器二次侧加在定子两端的机端电压,从而达到减小起动电流的目的。从定子电流波形可知,当转速接近正常运行转速时,接入全电压,比直接起动的定子电流小。但是在起动的过程中,由于自耦变压器的退出,电流波形出现了高电流峰值,存在2次大的冲击电流。 3、V/f比控制 1)加速(减速)斜率设置为200(-200)时(1)转子电流、定子电流、转速、转矩波形 (2)异步电机V/f比控制起动时转速—转矩特性曲线 2)加速(减速)斜率设置为100(-100)时 (1)转子电流、定子电流、转速、转矩波形 (2)异步电机V/f比控制起动时转速—转矩特性曲线 3)加速(减速)斜率设置为2(-2)时 (1)转子电流、定子电流、转速、转矩波形 (2)异步电机V/f比控制起动时转速—转矩特性曲线 三相异步电动机的机械特性 三相异步电动机的运行特性 摘要:本章介绍了三相异步电动机的机械特性的三个表达式。固有机械特性和人为机 械特性,阐述了三相异步电动机的起动、调速和制动的各种方法、特点和应用 5.1三相异步电动机的运行特性(返回顶部) 三相异步电动机的运行特性就是三相异步电动机的运行工作时的机械特性。和直流电 动机一样,三相异步电动机的机械特性也是指电磁转矩 与转子转速之间的关系。由于转子转速与同步转速 、转差率存在下列关系,即 (5.1) 则三相异步电动机的机械特性用曲线表示时,习惯上纵坐标同时表示转速和转差率,横坐标表示电磁转矩 。 三相异步电动机的机械特性有三种表达式,现介绍如下: 5.1.1机械特性的物理表达式(返回顶部) 由上一章三相异步电动机的转矩关系知,三相异步电动机转矩的一般表达式为 (5.2) 式中 为三相异步电动机的转矩系数,是一常数; 为三相异步电动机的气隙每极磁通量; 为转子电流的折算值; 为转子电路的功率因数; 式(5.2)表明了电磁转矩与磁通量和转子电流的有功分量的乘积成正比,它是电磁 力定律在三相异步电动机的应用,它从物理特性上描述了三相异步电动机的运行特性,因 此这一表达式又称为三相异步电动机的物理表达式。 仅从式(5.2)不能明显地看出电磁转矩 与转差率之间的变化规律。要从分析气隙每极磁通量 因数 ,转子相电流 ,以及为转子功率 与转差率之间的关系,间接地找出其变化规律。现分析 如表5.1所示。 根据表5.1中的分析,可作出曲线 、和 分别如图5.2、5.3、5.4所示,据此可得出图5.1所示的机械特性曲线。曲线分为两段:当较小时( 电磁转矩 与转子相电流 ), 变化不大, , 成正比关系,表现为AB 段近似为直线, ) ,如 , 减少近一 称为直线部分;当较大时 ( 半, 很小,尽管转子相电流 增大,有功电流 段, 段为曲线 不大,使电磁转矩 包头钢铁职业技术学院毕业实践任务书 题目:三相异步电动机的启动方式的设计 班级: 06五年制机电D 姓名:刘伟 指导老师:徐桂岩 完成日期: 2011.3.20 包头钢铁职业技术学院制 2011年3月 包头钢铁职业技术学院毕业实践任务书成绩及评语表 摘要 三相异步电动机的起动电流高达额定电流的5~8倍,对电网造成较大干扰,尤其在工业领域中的重载起动,有时可能对设备安全构成严重威胁。传统的降压起动方式,如星三角起动、自耦变压器起动等,要么起动电流和机械冲击过大,要么体积庞大笨重、损耗大,要么起动力矩小、维修率高等等,都不尽人意。软启动技术不仅实现在整个起动过程中无冲击而平滑地起动电动机,而且可根据电动机负载的特性来调节起动过程中的参数如限流值、起停时间等,以达到最佳的起停状态。 关键词异步电动机;软启动;设计 目录 `1前言 (1) 1.1 软启动的定义 (1) 1.2 软启动器的简单介绍 (1) 1.2.1 软启动器的保护功能 (1) 1.2.2 它与变频器有的区别 (1) 1.2.3 软启动的作用 (2) 1.3 电动机起动方式的选择 (2) 1.4 与传统启动的比较 (2) 1.4.1 软启动器的应用范围 (2) 1.4.2 软启动与传统减压起动方式的不同之处 (2) 2 软启动的基本原理 (4) 2.1 软启动器的优点 (4) 2.2 软启动器的控制接线 (5) 3 软启动电路 (6) 3.1 软启动器的控制原理图 (6) 3.2 硬件设计 (6) 3.3 电压同步信号检测电路 (7) 3.4 触发脉冲形成电路 (8) 4 总结 (10) 致谢 (11) 参考文献 (12)三相异步电动机的优缺点以及启动方式
三相异步电动机软启动装置设计
异步电动机几种启动方式的介绍
三相异步电动机的机械特性分解
三相异步电动机的机械特性习题
异步电动机软启动分析
三相异步电动机的部分习题及答案
三相异步电动机启动方法
三相异步电动机的机械特性
三相异步电动机软启动器
相异步电动机不同启动方式
三相异步电动机的机械特性
三相异步电动机的启动方式的设计(DOC)