弹簧质量阻尼系统模型
自动控制原理综合训练项目题目:关于MSD系统控制的设计
目录
1设计任务及要求分析 (2)
初始条件 (2)
要求完成的任务 (2)
任务分析 (3)
2系统分析及传递函数求解 (3)
系统受力分析 (3)
传递函数求解 (8)
系统开环传递函数的求解 (8)
3.用MATLAB对系统作开环频域分析 (9)
开环系统波特图 (9)
开环系统奈奎斯特图及稳定性判断 (10)
4.系统开环频率特性各项指标的计算 (11)
总结 (13)
参考文献 (13)
弹簧-质量-阻尼器系统建模与频率特性
分析
1设计任务及要求分析
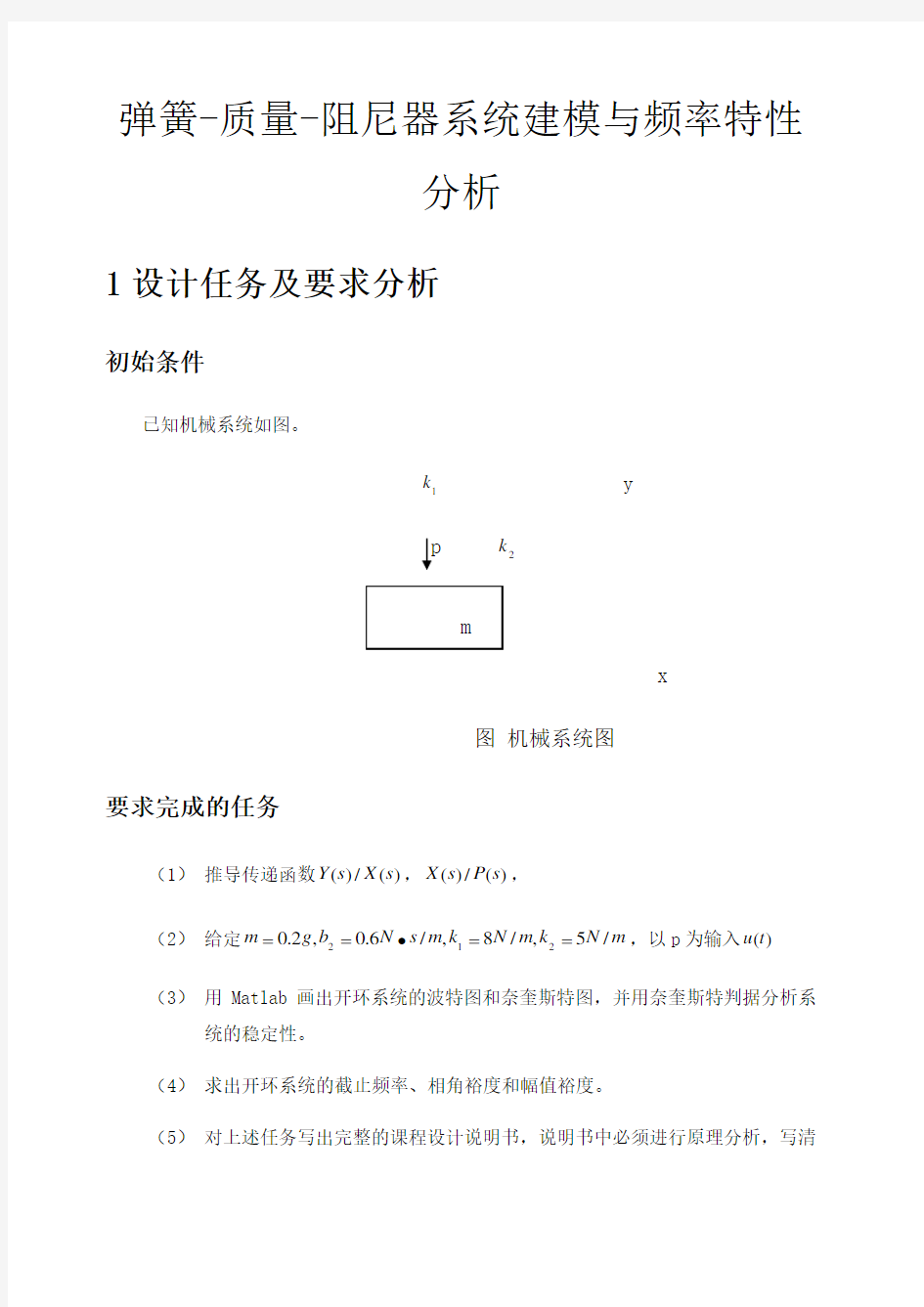
初始条件
已知机械系统如图。
1k y
p 2k
x
图 机械系统图
要求完成的任务
(1) 推导传递函数)(/)(s X s Y ,)(/)(s P s X ,
(2) 给定m N k m N k m s N b g m /5,/8,/6.0,2.0212==?==,以p 为输入)(t u (3) 用Matlab 画出开环系统的波特图和奈奎斯特图,并用奈奎斯特判据分析系
统的稳定性。
(4) 求出开环系统的截止频率、相角裕度和幅值裕度。
(5) 对上述任务写出完整的课程设计说明书,说明书中必须进行原理分析,写清
楚分析计算的过程及其比较分析的结果,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。
任务分析
由初始条件和要求完成的主要任务,首先对给出的机械系统进行受力分析,列出相关的微分方程,对微分方程做拉普拉斯变换,将初始条件中给定的数据代入,即可得出
)(/)(s X s Y ,)(/)(s P s X 两个传递函数。由于本系统是一个单位负反馈系统,故求出的传
递函数即为开环传函。后在MATLAB 中画出开环波特图和奈奎斯特图,由波特图分析系统的频率特性,并根据奈奎斯特判据判断闭环系统位于右半平面的极点数,由此可以分析出系统的稳定性。最后再计算出系统的截止频率、相角裕度和幅值裕度,并进一步分析其稳定性能。
2系统分析及传递函数求解
系统受力分析
单自由度有阻尼振系的力学模型如图2-1所示,包括弹簧、质量及阻尼器。以物体的平衡位置0为原点,建立图示坐标轴x 。则物体运动微分方程为
kx x c x m -=-&&& (2-1)
式中 : x c &-为阻尼力,负号表示阻尼力方向与速度方向相反。
图2-1
将上式写成标准形式,为
0=++kx x c x m &&& (2-2)
令p 2=
m k , m
c
n =2, 则上式可简化为 022=++p x n x &&&
(2-3)
这就是有阻尼自由振动微分方程。它的解可取st e x =,其中
s 是待定常数。代入(2-1)式得 0)2(22=++st e p ns s ,要使所有时间内上式都能满足,必须0222=++p ns s ,此即微分方程的特征方程,其解为
222,1p n n s -±-= (2-4)
于是微分方程(2-1)的通解为
)(2222212121t
p n t
p n nt t s t s e c e
c e e c e c x --
--+=+= (2-5)
式中待定常数c 1与c 2决定与振动的初始条件。振动系统的性质决定于根式22p n -是实数、零、还是虚数。对应的根s 1与s 2可以是不相等的负实根、相等的负实根或复根。若s 1与s 2为等根时,此时的阻尼系数值称之为临界阻尼系数,记为c c ,即c c =2mp 。引进一个无量纲的量ζ,称为相对阻尼系数或阻尼比。
c c c mp c p n /2//===ζ (2-6)
当n>p 或ζ>1,根式22p n -是实数,称为过阻尼状态,当n
1.过阻尼状态
此时ζ>1,即22p n - 示的 是两条指数曲线之和,仍按指数衰减,不是振动。图3-2所示为c 1>c 2,c 1<0时的情况。 图2-2 2.临界阻尼状态 此时ζ=1,(b )式中s 1=s 2=-n =-p ,特征方程的根是重根,方程(2-1)的另一 解将为te -pt ,故微分方程(2-1)的通解为 x =(c 1+c 2t )e -pt (2-7) 式中等号右边第一项c 1e -pt 是一根下降的指数曲线,第二项则可应用麦克劳林级数展开成以下形式: ! /!3/!2//12322 /22n t p t p t p p t c e c te c n n t pt pt +??????++++== - (2-8) 从上式看出,当时间t 增长时,第二项c 2te -pt 也趋近于零。因此(c )式表示的运动也不是振动,也是一个逐渐回到平衡位置的非周期运动。 3.弱阻尼状态 此时p>n,或ζ<1。利用欧拉公式 t n p i t n p e e t n p t p n 2222sin cos 2222-±-==-±-±(2-9) 可将(2-2)式改写为 ) sin cos ()(222221212222t n p D t n p D e e C e C e x nt t n p i t n p i nt -+-=+=-----(2-10) 或 )sin(22?+-=-t n p Ae x nt (1-11) 令22n p p d -= ,则 )sin(?+=-t p Ae x d nt (2-12) 式中A 与?为待定常数,决定于初始条件。设t =0时,x =x 0,0x x &&=,则可求得 0012 002 0,)( x nx x p x tg p nx x A d d +=++=-&&? (2-13) 将A 与?代入(2-4)式,即可求得系统对初始条件的响应,由式(2-13)可知,系统振 动已不再是等幅的简谐振动,而是振幅被限制在曲线nt Ae -+-之内随时间不断衰减的衰减振动。如图3-3所示。 图2-3 这种衰减振动的固有圆频率、固有频率和周期分别为 2221ζ-=-=P n P P d (2-14) 2 2222 22211 11221122ζζππζζπ π-=-=-=-=-=-=T P n P T f P n P f d d (2-15) 式中P 、f 、T 是无阻尼自由振动的固有圆频率、固有频率和周期。 由上可见,阻尼对自由振动的影响有两个方面:一方面是阻尼使自由振动的周期增大、频率减小,但在一般工程问题中n 都比P 小得多,属于小阻尼的情况。例ζ=n/p=时,f d =,T d =;而在ζ=时,f d =,T d =,所以在阻尼比较小时,阻尼对系统的固有频率和周期的影响可以略去不计,即可以近似地认为有阻尼自由振动的频率和周期与无阻尼自由振动的频率和周期相等。另一方面,阻尼对于系统振动振幅的影响非常显着,阻尼使振幅随着时间不断衰减,其顺次各个振幅是:t=t 1时,A 1=Ae -nt 1;t=t 1+T d 时,A 2=A )(1d T t n e +-;t=t 1+2T d 时,A 3=A )2(1d T t n e +-,…..。而相邻两振幅之比是个常数。即 nTd j j e A A ==+1/η (2-16) 式中η称为减幅系数或振幅衰减率,n 称为衰减系数,n 越大表示阻尼越大,振幅衰减也越快。当ζ=时,η=,A 2=A 1/=,每一个周期内振幅减少27%,振幅按几何级数衰减,经过10次振动后,振幅将减小到初值的%。可见,衰减是非常显着的。在工程上,通常取(2-6)式的自然对数以避免取指数的不便,即 d j j nT A A Ln ==+)/(1δ (2-17) 式中δ称为对数减幅或对数衰减率。 将22/2n p T d -=π代入,得 2221/2/2ζπζπδ-=-=n p n (2-18) 当 ζ<<1时, δ≈2πζ (2-19) 因为任意两个相邻的振幅之比是一个常数e nTd ,即 故有 因此对数减幅δ也可表达为 ) 1(11 += j A A Ln j δ (2-20) 此外,根据(3-6)式,可以用实测法来求得系统的阻尼系数。因为 1 11 1 21+++=→= →=j j d j j d d j j A A Ln T m c A A Ln T n nT A A Ln 故 1 2+=j j d A A Ln T m c (2-21) 所以只要实测得出衰减振动的周期T d 及相邻两次振幅A j 和A j+1,即可计算出系统的阻尼系数C 。 根据弹簧和阻尼器的特性可得以下关系式: F k1(t)=k 1x(t), F k2(t)=k 2[x(t)-y(t)], F b2(t)=b 2dy(t)/dt 设不加p(t)时,质量块处于平衡状态,此时x=0,y=0,即x(0)=0,y(0)=0,根据受力平衡方程,在不计重力时,可得出以下方程: k 2[x(t)-y(t)]=b 2dy(t)/dt (2-22) 又根据牛顿第二定律,有方程: md 2x(t)/dt 2=p(t)-F k1(t)-F k2(t)-F b2(t) (2-23) 传递函数求解 (1)求Y(s)/X(s): 对式(2-1)进行拉普拉斯变换,得:k 2X(s)-k 2Y(s)=b 2*sY(s),化简得传递函数: Y(s)/X(s)=k 2/(b 2s+k 2) (2-24) (2)求X(s)/P(s): 对式(2-2)进行拉普拉斯变换,得:ms 2X(s)=P(s)-k 1X(s)-2k 2[X(s)-Y(s)],并将 式(2-3)代入可解得传递函数: X(s)/P(s)=(b 2s+k 2)/[mb 2s 3+mk 2s 2+b 2(k 1+2k 2)s+k 1k 2] (2-25) 已知条件为:给定m N k m N k m s N b g m /5,/8,/6.0,2.0212==?==,设)(t p 是输入 )(t u 的阶跃力。 将所给参数代入传递函数式(2-3)和式(2-4)中,可求得具体的传递函数如下: Y(s)/X(s)=5/+5) (2-26) X(s)/P(s)=+5)/(*10^-4s3+10^-3s2++40) (2-27) 系统开环传递函数的求解 (1)对于Y(s)/X(s): 由微分方程Y(s)/X(s)=5/+5)可画出单位负反馈系统方框结构图如下: (2)对于X(s)/P(s): 由微分方程ms2X(s)=P(s)-k1X(s)-2k2[X(s)-Y(s)]及Y(s)/X(s)=k2/(b2s+k2)可画出系统方框结构图如下: 故开环传递G(s)=(0.6s+5)/(1.2?10?4s3+10?3s2+10.8s+40) 3.用MATLAB对系统作开环频域分析 开环系统波特图 (1)对于Y(s)/X(s):G(s)=5/(0.6s+5) 画波特图时采用的MATLAB语句如下: >> num=[5];den=([,5]); >> margin(num,den) %画系统的开环对数幅频、相频特性运行结果如图3-1 图3-1 Y(s)/X(s)的开环波特图 (2)对于X(s)/P(s): G(s)= (0.6s+5)/(1.2?10?4s3+10?3s2+10.8s+40) 画波特图时采用的MATLAB语句如下: >> num=[,5];den=([1.2?10?4,10?3,10.8,40]); >> margin(num,den) %画系统的开环对数幅频、相频特性运行结果如图3-2所示: 图3-2 X(s)/P(s)的开环波特图 开环系统奈奎斯特图及稳定性判断 (1)对于Y(s)/X(s) 画奈奎斯特图时MATLAB语句如下: >> num=[5]; >> den=[,5]; >> nyquist(num,den) 运行结果如图3-3所示: 图3-3 Y(s)/X(s)开环奈奎斯特图 开环传函G(S)=5/(0.6s+5),由于系统开环传递函数不存在右半平面的极点,故P=0,ω从0变到+∞时,系统的开环幅相曲线不能包围(-1,j0)点周数N=0,则系统位于右半平面的闭环极点数为:Z=P-2N=0,故系统是稳定的。 (2)对于X(s)/P(s) 画奈奎斯特图时MATLAB语句如下: >> num=[,5]; >> den=[1.2?10?4,10?3,10.8,40]; >> nyquist(num,den) 运行结果如图3-4所示: 图3-4 X(s)/P(s)开环奈奎斯特图 开环传函G(s)= (0.6s+5)/(1.2?10?4s3+10?3s2+10.8s+40) ,由于系统开环传递函数不存在右半平面的极点,故P=0,ω从0变到+∞时,系统的开环幅相曲线不能包围(-1,j0)点周数N=0,则系统位于右半平面的闭环极点数为:Z=P-2N=0,故系统是稳定的。 4.系统开环频率特性各项指标的计算 (1)对于Y(s)/X(s):G(S)=5/(0.6s+5) 计算各项频率指标时采用的MATLAB语句如下: >> num=[5];den=([,5]); >> margin(num,den); >> [gm,pm,wcg,wcp]=margin(num,den) 计算幅值裕度gm(γ )、相位裕度pm(h0)、穿越频率wcg(ωr0)、截止频率wcp(ωc0)。 运行结果 gm = pm = 180 wcg = NaN wcp = 由结果可知该系统幅值裕度为无穷,截止频率为0,相位裕度为180是正值,故系统稳定。(2)对于X(s)/P(s) :G(s)= (0.6s+5)/(1.2?10?4s3+10?3s2+10.8s+40) 计算各项频率指标时采用的MATLAB语句如下: >> num=[,5];den=([*10^-4,10^-3,,40]) >> margin(num,den); >> [gm,pm,wcg,wcp]=margin(num,den) )、相位裕度pm(h0)、穿越频率wcg(ωr0)、截止频率wcp(ωc0)。计算幅值裕度gm(γ 运行结果 gm = Inf pm = Inf wcp = 由结果可知该系统幅值裕度为无穷,截止频率为308rad/s,相位裕度为是正值,故系统稳定。 总结 本次课设是对一个弹簧-质量-阻尼器系统建模并进行频率特性分析。首先根据这个实际的机械系统的受力分析得出它的受力微分方程,对其进行拉普拉斯变换,可以得出传递函数。在求开环传递函数的过程中我遇到了一些困难,在老师的指点和同学的帮助下我发现自己其实把问题想得过于复杂了,原来这是一个单位负反馈的稳定系统,求出的传递函数即为开环传函。接下来便是MATLAB的应用,利用MATLAB可以轻松地对系统做出频率特性分析,画出Bode图和奈奎斯特图,并通过奈奎斯特判据判断闭环系统的稳定性。也可以利用MATLAB语句直接求出各项频率特性指标,从而可以进一步对系统做出分析,完成既定目标。 通过本次课设,加强了我对MATLAB程序的应用能力,这是一款功能强大而又实用性很强的程序,对于我们专业的学习有着很强的帮助性;另一方面也加强了我对课本理论知识的理解,通过MATLAB的分析也印证了平时自己学习理论知识时所用分析方法的正确性。最后通过本次课设也提高了我个人独立思考、查阅资料和解决问题的能力,使我受益匪浅。 参考文献 [1]王子才.控制系统设计手册. 北京:国防工业出版社,1993 [2]王树青,乐嘉谦. 自动化与仪表工程师手册.北京:化学工业出版社,2010 [3]黄德先等. 过程控制系统. 北京:清华大学出版社,2011 [4]蒋慰孙,俞金寿. 过程控制工程. 第二版. 北京:中石化出版社,2004 [5]黄德先等.化工过程先进控制. 北京:化学工业出版社,2006 [6] 王孝武,方敏,葛锁良.《自动控制理论》.北京:机械工业出版社.2009 [7] 胡寿松.《自动控制原理(第五版)》.科学出版社.2007 [8] 胡寿松.《自动控制原理习题解析》.科学出版社.2007 分数: ___________ 任课教师签字:___________ 华北电力大学研究生结课作业 学年学期:第一学年第一学期 课程名称:线性系统理论 学生姓名: 学号: 提交时 目录 目录 (1) 1 研究背景及意义 (3) 2 弹簧-质量-阻尼模型 (3) 2.1 系统的建立 (3) 2.1.1 系统传递函数的计算 (4) 2.2 系统的能控能观性分析 (6) 2.2.1 系统能控性分析 (6) 2.2.2 系统能观性分析 (7) 2.3 系统的稳定性分析 (7) 2.3.1 反馈控制理论中的稳定性分析方法 (7) 2.3.2 利用Matlab分析系统稳定性 (8) 2.3.3 Simulink仿真结果 (9) 2.4 系统的极点配置 (10) 2.4.1 状态反馈法 (10) 2.4.2 输出反馈法 (11) 2.4.2 系统极点配置 (11) 2.5系统的状态观测器 (13) 2.6 利用离散的方法研究系统的特性 (15) 2.6.1 离散化定义和方法 (15) 2.6.2 零阶保持器 (16) 2.6.3 一阶保持器 (17) 2.6.4 双线性变换法 (18) 3.总结 (18) 4.参考文献 (19) 弹簧-质量-阻尼系统的建模与控制系统设计 1 研究背景及意义 弹簧、阻尼器、质量块是组成机械系统的理想元件。由它们组成的弹簧-质量-阻尼系统是最常见的机械振动系统,在生活中具有相当广泛的用途,缓冲器就是其中的一种。缓冲装置是吸收和耗散过程产生能量的主要部件,其吸收耗散能量的能力大小直接关系到系统的安全与稳定。缓冲器在生活中处处可见,例如我们的汽车减震装置和用来消耗碰撞能量的缓冲器,其缓冲系统的性能直接影响着汽车的稳定与驾驶员安全;另外,天宫一号在太空实现交会对接时缓冲系统的稳定与否直接影响着交会对接的成功。因此,对弹簧-质量-阻尼系统的研究有着非常深的现实意义。 2 弹簧-质量-阻尼模型 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型,不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 图2-1弹簧-质量-阻尼系统机械结构简图 其中、表示小车的质量,表示缓冲器的粘滞摩擦系数,表示弹簧的弹性系数,表示小车所受的外力,是系统的输入即,表示小车的位移,是系统的输出,即,i=1,2。设缓冲器的摩擦力与活塞的速度成正比,其中,,,,,。 2.1 系统的建立 弹簧-质量-阻尼模型 弹簧-质量-阻尼系统 1 研究背景及意义 弹簧-质量-阻尼系统是一种比较普遍的机械振动系统,研究这种系统对于我们的生活与科技也是具有意义的,生活中也随处可见这种系统,例如汽车缓冲器就是一种可以耗减运动能量的装置,是保证驾驶员行车安全的必备装置,再者在建筑抗震加固措施中引入阻尼器,改变结构的自振特性,增加结构阻尼,吸收地震能量,降低地震作用对建筑物的影响。因此研究弹簧-质量-阻尼结构是很具有现实意义。 2 弹簧-质量-阻尼模型的建立 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型, 不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 图2.1 弹簧-质量-阻尼系统简图 其中1 m ,2 m 表示小车的质量,i c 表示缓冲器的粘滞摩擦系数,i k 表示弹簧的弹性系数,i F (t )表示小车所受的外力,是系统的输入即i U (t )=i F (t ),i X (t)表示小车的位移,是系统的输出,即i Y (t )=i X (t),i=1,2。设缓冲器的摩擦力与活塞的速度成正比,其中1m =1kg ,2 m =2kg ,1k =3k =100N/cm ,2k =300N/cm ,1c =3 c =3N ?s/cm ,2 c =6N ?s/cm 。 由图 2.1,根据牛顿第二定律,,建立系统的动力学模型如下: 对1 m 有: (2-1) 对2 m 有: (2-2) 3 建立状态空间表达式 令3 1421122 ,,,x x x x u F u F ====,则原式可化为: 质量-弹簧-阻尼系统实验教学指导书 北京理工大学机械与车辆学院 2016.3 实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为m 的滑块、一个 刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ??? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应: ()()sin()))] t t x t t d e ζωττζωττ +∞ --=? -= -+-? 2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step 设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。此步是为了使控制器得到一段时间的数据,并不会驱动电机运动。 (4)点击Data菜单,选择Data Acquisition,设置选取Encoder#1 ,然后OK离开;从Utility菜单中选择Zero Position使编码器归零。 (5)从Command菜单中选择Execute,用手将质量块1移动到2.5cm左右的位置(注意不要使质量块碰触移动限位开关),点击Run, 大约1秒后,放开手使其自由震荡,在数据上传后点击OK。 (6)点击Plotting菜单,选择Setup Plot,选取Encoder #1 Position;然后点击Plotting 菜单,选择Plot Data,则将显示质量块1的自由振动响应曲线。 (7)在得到的自由振动响应曲线图上,选择n个连续的振幅明显的振动周期,计算出这段振动的时间t,由n/t即可得到系统的频率,将Hz转化为rad/sec即为系统的振动频率ω。 自动控制原理综合训练项目题目:关于MSD系统控制的设计 目录 1设计任务及要求分析 (2) 初始条件 (2) 要求完成的任务 (2) 任务分析 (3) 2系统分析及传递函数求解 (3) 系统受力分析 (3) 传递函数求解 (8) 系统开环传递函数的求解 (8) 3.用MATLAB对系统作开环频域分析 (9) 开环系统波特图 (9) 开环系统奈奎斯特图及稳定性判断 (10) 4.系统开环频率特性各项指标的计算 (11) 总结 (13) 参考文献 (13) 弹簧-质量-阻尼器系统建模与频率特性 分析 1设计任务及要求分析 初始条件 已知机械系统如图。 1k y p 2k x 图 机械系统图 要求完成的任务 (1) 推导传递函数)(/)(s X s Y ,)(/)(s P s X , (2) 给定m N k m N k m s N b g m /5,/8,/6.0,2.0212==?==,以p 为输入)(t u (3) 用Matlab 画出开环系统的波特图和奈奎斯特图,并用奈奎斯特判据分析系 统的稳定性。 (4) 求出开环系统的截止频率、相角裕度和幅值裕度。 (5) 对上述任务写出完整的课程设计说明书,说明书中必须进行原理分析,写清 楚分析计算的过程及其比较分析的结果,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 任务分析 由初始条件和要求完成的主要任务,首先对给出的机械系统进行受力分析,列出相关的微分方程,对微分方程做拉普拉斯变换,将初始条件中给定的数据代入,即可得出 )(/)(s X s Y ,)(/)(s P s X 两个传递函数。由于本系统是一个单位负反馈系统,故求出的传 递函数即为开环传函。后在MATLAB 中画出开环波特图和奈奎斯特图,由波特图分析系统的频率特性,并根据奈奎斯特判据判断闭环系统位于右半平面的极点数,由此可以分析出系统的稳定性。最后再计算出系统的截止频率、相角裕度和幅值裕度,并进一步分析其稳定性能。 2系统分析及传递函数求解 系统受力分析 单自由度有阻尼振系的力学模型如图2-1所示,包括弹簧、质量及阻尼器。以物体的平衡位置0为原点,建立图示坐标轴x 。则物体运动微分方程为 kx x c x m -=-&&& (2-1) 式中 : x c &-为阻尼力,负号表示阻尼力方向与速度方向相反。 图2-1 将上式写成标准形式,为 0=++kx x c x m &&& (2-2) 令p 2= m k , m c n =2, 则上式可简化为 022=++p x n x &&& (2-3) 弹簧质量阻尼系统模型 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】 自动控制原理综合训练项目 题目:关于MSD系统控制的设计 目录 弹簧-质量-阻尼器系统建模与频率特性分析 1设计任务及要求分析 初始条件 已知机械系统如图。 1 k y p 2 k 图机械系统图 要求完成的任务 (1)推导传递函数) ( /) (s X s Y,) ( /) (s P s X, (2)给定m N k m N k m s N b g m/ 5 , / 8 , / 6.0 , 2.0 2 1 2 = = ? = =,以p为输入)(t u (3)用Matlab画出开环系统的波特图和奈奎斯特图,并用奈奎斯特判据分析系统的稳定性。 (4)求出开环系统的截止频率、相角裕度和幅值裕度。 (5)对上述任务写出完整的课程设计说明书,说明书中必须进行原理分析,写清楚分析计算的过程及其比较分析的结果,并包含Matlab源 程序或Simulink仿真模型,说明书的格式按照教务处标准书写。 任务分析 由初始条件和要求完成的主要任务,首先对给出的机械系统进行受力分析,列出相关的微分方程,对微分方程做拉普拉斯变换,将初始条件中给定的数据代入,即可得出)(/)(s X s Y ,)(/)(s P s X 两个传递函数。由于本系统是一个单位负反馈系统,故求出的传递函数即为开环传函。后在MATLAB 中画出开环波特图和奈奎斯特图,由波特图分析系统的频率特性,并根据奈奎斯特判据判断闭环系统位于右半平面的极点数,由此可以分析出系统的稳定性。最后再计算出系统的截止频率、相角裕度和幅值裕度,并进一步分析其稳定性能。 2系统分析及传递函数求解 系统受力分析 单自由度有阻尼振系的力学模型如图2-1所示,包括弹簧、质量及阻尼器。以物体的平衡位置0为原点,建立图示坐标轴x 。则物体运动微分方程为 kx x c x m -=- (2-1) 式中 : x c -为阻尼力,负号表示阻尼力方向与速度方向相反。 图2-1 将上式写成标准形式,为 0=++kx x c x m (2-2) 令p 2= m k , m c n =2, 则上式可简化为 022=++p x n x (2-3) 这就是有阻尼自由振动微分方程。它的解可取st e x =,其中 *** 二阶弹簧—阻尼系统的PID控制器设计及参数整定 一、PID 控制的应用研究现状综述 PID 控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自20 世纪30 年代末期出现以来,在工业控制领域得到了很大的发展和广泛的应用。它的结构简单,参数易于调整, 在长期应用中已积累了丰富的经验。特别是在工业过程控制中, 由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果。在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现。由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字PID 具有很大的灵活性和适用性。 二、研究原理 比例控制器的传递函数为:G (s) K P P G (s) K PI P 1 1 T s I 积分控制器的传递函数为: 1 1 G (s) K T s PID P D T s I 微分控制器的传递函数为: 三、设计题目 设计控制器并给出每种控制器控制的仿真结果(被控对象为二阶环节,传递函数G S ,参数为M=1 kg, b=2 N.s/m, k=25 N/m, F(S)=1 );系统示意图如图 1 所示。 图1 弹簧-阻尼系统示意图弹簧-阻尼系统的微分方程和传递函数为:M x bx kx F G( s) X F ( ( s) s) Ms 1 1 2 bs k s2 s 2 25 四、设计要求 通过使用MATLAB 对二阶弹簧——阻尼系统的控制器(分别使用P、PI、PID 控制器)设计及其参数整定,定量 分析比例系数、积分时间与微分时间对系统性能的影响。同 时、掌握MATLAB 语言的基本知识进行控制系统仿真和辅 助设计,学会运用SIMULINK 对系统进行仿真,掌握PID 控制器参数的设计。 (1)控制器为P 控制器时,改变比例带或比例系数大小,分析对系统性能的影响并绘制响应曲线。 (2)控制器为PI 控制器时,改变积分时间常数大小, 分析对系统性能的影响并绘制相应曲线。(当kp=50 时,改变积分时间常数) 弹簧质量系统瞬态响应分析 一、弹簧系统研究的背景、研究的目的和意义及国内外研究趋势分析 1.1 弹簧质量系统提出的背景、研究的目的和意义 弹簧作为储能元件,在减振器机械缓冲器等方面得到越来越广泛的应用。而由螺旋弹簧与质量块组成的螺旋弹簧系统可以说几乎在任何机电仪器和设备中都有它的存在。作为一常用零部件,其各项性能指标,尤其是其强度指标,直接或间接地影响整机的性能和工作质量。因此对螺旋弹簧质量系统的机械性解响应及其强度分析受到了国内外专家,学者和工程技术人员的普遍重视。载荷下弹簧质量系统的瞬态响应,这个问题具有广泛的意义和实际应用价值。 1.2 弹簧质量系统在国内外同一研究领域的现状与趋势分析 关于载荷作用下弹簧质量系统的工作和文献很多,大多数问题都是围绕着,螺旋弹簧质量系统在承受静载荷或低频周期性载荷的情况下进行分析的。其结论主要适用于对螺旋弹簧质量系统的静强度分析和固定载荷下的可靠性。实验结果和经验表明,造成弹簧失效的一个主要原因是:当它承受突加载荷时,产生的冲激响应。在冲激载荷下,弹簧失效数目很多,往往经静强度分析或固定载荷分析的结论是可靠的,而实际情况是不可靠的。所以激载荷下的可靠性设计就不得不被提出来了。但这方面文献非常少,实验数据也不多。 就弹簧质量系统在57火炮输弹系统的应用而言,螺旋弹簧失效主要是冲激失效,对这个问题的研究,美国、俄罗斯的水平较高,它们的主要工作是从提高材料性能上大量的实验进行的。其寿命指标可达 2000次,我国的现有水平较差,平均寿命在500一1000次之间,所以,对输弹系统进行寿命估计,找出问题,具有很大的应用价值和经济价值。 二、一维单自由度弹簧质量系统固有频率理论推导 2.1无阻尼弹簧质量系统的自由振动 如图1 所示,就是本文要讨论的单自由度无阻尼系统。 该系统有质量为m 的重物(惯性元件)和刚度为k的弹簧(弹性元件)组成。假设不考虑重物的尺寸效应,可以用一个简单质点来表示这一类重物。为了描述图示系统位置,采用如图 1 所示的单轴坐标系。坐标原点选取在质点静平衡位置,用x 表示质点在任意时刻处于坐标系中的坐标,以向下的方向为正。在此系统运动过程中,x 是时间t 的函数,可以称为质点的位移函数。由于只需要一个空间坐标x,就可以完全确定图中质点任意时刻的位置,因此可以认为该系统就是单自由度系统。不考虑阻尼的情形下,系统将在初始条件激励下,围绕静平衡点做无阻尼自由振动。 2.2 振动方程的建立方法 2.2.1 用牛顿第二定律法建立微分方程 牛顿第二定律又称运动定律,即物体动量的改变与施加的力量成正比。对于图示系统,定义质点的静平衡位置为坐标原点,则质点与 word文档整理分享 分数: ___________ 任课教师签字:___________ 华北电力大学研究生结课作业 学年学期:第一学年第一学期 课程名称:线性系统理论 学生姓名: 学号: 提交时间:2014.11.27 目录 目录 (2) 1 研究背景及意义 (4) 2 弹簧-质量-阻尼模型 (4) 2.1 系统的建立 (5) 2.1.1 系统传递函数的计算 (7) 2.2 系统的能控能观性分析 (9) 2.2.1 系统能控性分析 (10) 2.2.2 系统能观性分析 (11) 2.3 系统的稳定性分析 (12) 2.3.1 反馈控制理论中的稳定性分析方法 (12) 2.3.2 利用Matlab分析系统稳定性 (13) 2.3.3 Simulink仿真结果 (15) 2.4 系统的极点配置 (18) 2.4.1 状态反馈法 (18) 2.4.2 输出反馈法 (19) 2.4.2 系统极点配置 (20) 2.5系统的状态观测器 (22) 2.6 利用离散的方法研究系统的特性 (24) 2.6.1 离散化定义和方法 (24) 2.6.2 零阶保持器 (26) 2.6.3 一阶保持器 (29) 2.6.4 双线性变换法 (31) 3.总结 (33) 4.参考文献 (33) 弹簧-质量-阻尼系统的建模与控制系统设计 1 研究背景及意义 弹簧、阻尼器、质量块是组成机械系统的理想元件。由它们组成的弹簧-质量-阻尼系统是最常见的机械振动系统,在生活中具有相当广泛的用途,缓冲器就是其中的一种。缓冲装置是吸收和耗散过程产生能量的主要部件,其吸收耗散能量的能力大小直接关系到系统的安全与稳定。缓冲器在生活中处处可见,例如我们的汽车减震装置和用来消耗碰撞能量的缓冲器,其缓冲系统的性能直接影响着汽车的稳定与驾驶员安全;另外,天宫一号在太空实现交会对接时缓冲系统的稳定与否直接影响着交会对接的成功。因此,对弹簧-质量-阻尼系统的研究有着非常深的现实意义。 2 弹簧-质量-阻尼模型 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型,不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 弹簧-质量-阻尼系统 1 研究背景及意义 弹簧-质量-阻尼系统是一种比较普遍的机械振动系统,研究这种系统对于我们的生活与科技也是具有意义的,生活中也随处可见这种系统,例如汽车缓冲器就是一种可以耗减运动能量的装置,是保证驾驶员行车安全的必备装置,再者在建筑抗震加固措施中引入阻尼器,改变结构的自振特性,增加结构阻尼,吸收地震能量,降低地震作用对建筑物的影响。因此研究弹簧-质量-阻尼结构是很具有现实意义。 2 弹簧-质量-阻尼模型的建立 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型 ,不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提 。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 图2.1 弹簧-质量-阻尼系统简图 其中1m ,2m 表示小车的质量,i c 表示缓冲器的粘滞摩擦系数,i k 表示弹簧的弹性系数,i F (t )表示小车所受的外力,是系统的输入即i U (t )=i F (t ),i X (t)表示小车的位移,是系统的输出,即i Y (t )=i X (t),i=1,2。设缓冲器的摩擦力与活塞的速度成正比,其中1m =1kg ,2m =2kg ,1k =3k =100N/cm ,2k =300N/cm ,1c =3c =3N ?s/cm ,2c =6N ?s/cm 。 由图2.1,根据牛顿第二定律,,建立系统的动力学模型如下: 对1m 有: (2-1) 对2m 有: 弹簧质量阻尼系统的建模与控制系统设计 TPMK standardization office【 TPMK5AB- TPMK08- TPMK2C- TPMK18】 分数: ___________ 任课教师签字:___________ 华北电力大学研究生结课作业 学年学期:第一学年第一学期 课程名称:线性系统理论 学生姓名: 学号: 提交时 目录 目录 (2) 1 研究背景及意义 (3) 2 弹簧-质量-阻尼模型 (3) 2.1 系统的建立 (4) 2.1.1 系统传递函数的计算 (5) 2.2 系统的能控能观性分析 (7) 2.2.1 系统能控性分析 (8) 2.2.2 系统能观性分析 (9) 2.3 系统的稳定性分析 (10) 2.3.1 反馈控制理论中的稳定性分析方法 (10) 2.3.2 利用Matlab分析系统稳定性 (10) 2.3.3 Simulink仿真结果 (12) 2.4 系统的极点配置 (15) 2.4.1 状态反馈法 (15) 2.4.2 输出反馈法 (16) 2.4.2 系统极点配置 (16) 2.5系统的状态观测器 (18) 2.6 利用离散的方法研究系统的特性 (20) 2.6.1 离散化定义和方法 (20) 2.6.2 零阶保持器 (22) 2.6.3 一阶保持器 (24) 2.6.4 双线性变换法 (26) 3.总结 (28) 4.参考文献 (28) 弹簧-质量-阻尼系统的建模与控制系统设计 1 研究背景及意义 弹簧、阻尼器、质量块是组成机械系统的理想元件。由它们组成的弹簧-质量-阻尼系统是最常见的机械振动系统,在生活中具有相当广泛的用途,缓冲器就是其中的一种。缓冲装置是吸收和耗散过程产生能量的主要部件,其吸收耗散能量的能力大小直接关系到系统的安全与稳定。缓冲器在生活中处处可见,例如我们的汽车减震装置和用来消耗碰撞能量的缓冲器,其缓冲系统的性能直接影响着汽车的稳定与驾驶员安全;另外,天宫一号在太空实现交会对接时缓冲系统的稳定与否直接影响着交会对接的成功。因此,对弹簧-质量-阻尼系统的研究有着非常深的现实意义。 2 弹簧-质量-阻尼模型 数学模型是定量地描述系统的动态特性,揭示系统的结构、参数与动态特性之间关系的数学表达式。其中,微分方程是基本的数学模型,不论是机械的、液压的、电气的或热力学的系统等都可以用微分方程来描述。微分方程的解就是系统在输入作用下的输出响应。所以,建立数学模型是研究系统、预测其动态响应的前提。通常情况下,列写机械振动系统的微分方程都是应用力学中的牛顿定律、质量守恒定律等。 弹簧-质量-阻尼系统是最常见的机械振动系统。机械系统如图2.1所示, 图2-1弹簧-质量-阻尼系统机械结构简图 其中、表示小车的质量,表示缓冲器的粘滞摩擦系数,表示弹簧的弹性系数,表示小车所受的外力,是系统的输入即 ,表示小车的位移,是系统的输出,即,弹簧质量阻尼系统的建模与控制系统设计
弹簧-质量-阻尼模型
弹簧-质量-阻尼实验指导书
弹簧质量阻尼系统模型
弹簧质量阻尼系统模型
二阶弹簧—阻尼系统,PID控制器设计,参数整定
弹簧质量系统瞬态响应分析
弹簧_质量_阻尼系统的建模及控制系统设计说明书
弹簧-高质量-阻尼模型
弹簧质量阻尼系统的建模与控制系统设计