有限元边界条件和载荷

X边界条件和载荷
10.1边界条件
施加的力和/或者约束叫做边界条件。在HyperMesh中,边界条件存放在叫做load collectors的载荷集中。Load collectors可以通过在模型浏览器中点击右键来创建(Create > Load Collector)。
经常(尤其是刚开始)需要一个load collector来存放约束(也叫做spc-单点约束),另外一个用来存放力或者压力。记住,你可以把任何约束(比如节点约束自由度1和自由度123)放在一个load collector中。这个规则同样适用于力和压力,它们可以放在同一个load collector中而不管方向和大小。
下面是将力施加到结构的一些基本规则。
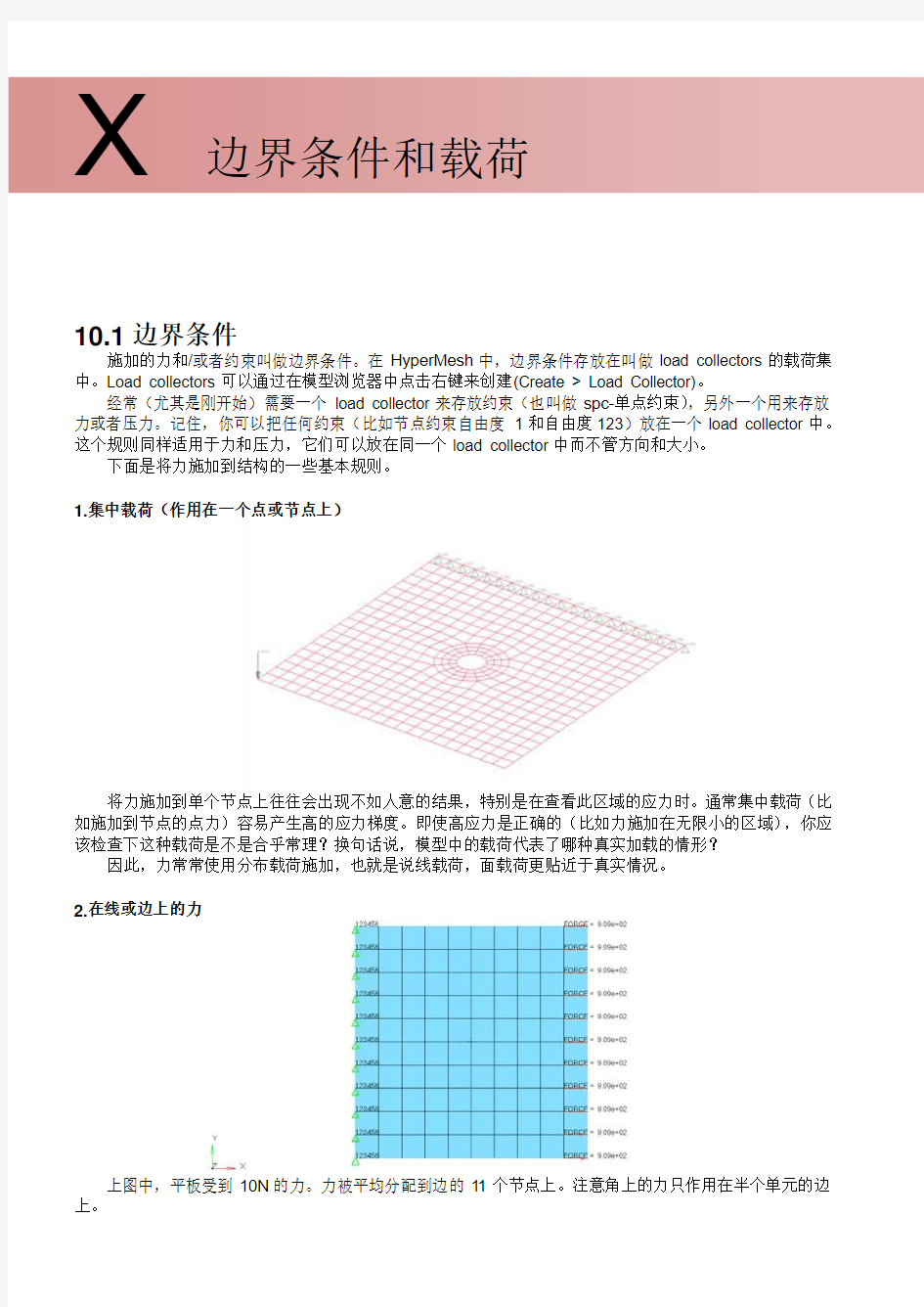
1.集中载荷(作用在一个点或节点上)
将力施加到单个节点上往往会出现不如人意的结果,特别是在查看此区域的应力时。通常集中载荷(比如施加到节点的点力)容易产生高的应力梯度。即使高应力是正确的(比如力施加在无限小的区域),你应该检查下这种载荷是不是合乎常理?换句话说,模型中的载荷代表了哪种真实加载的情形?
因此,力常常使用分布载荷施加,也就是说线载荷,面载荷更贴近于真实情况。
2.在线或边上的力
上图中,平板受到10N的力。力被平均分配到边的11个节点上。注意角上的力只作用在半个单元的边上。
上图是位移的云图。注意位于板的角上的红色“热点”。局部最大位移是由边界效应引起的(例如角上的力只作用在半个单元的边上),我们应该在板的边线上添加均匀载荷。
上述例子中,平板依然承受10N的力。但这次角上节点的受力减少为其他节点受力的一半大小。
上图显示了由plate_distributed.hm文件计算得到的平板位移的云图分布。位移分布更加均匀。
3.牵引力(或斜压力)
牵引力是作用在一块区域上任意方向而不仅仅是垂直于此区域的力。垂直于此区域的力称为压力。
4.分布载荷(由公式确定的分布力)
如何施加一个大小变化的力?
分布载荷(大小随着节点或单元坐标变化)可以由一个公式来创建。上图中,力的大小是节点坐标y 值的函数(力作用方向为负的z方向,大小是节点坐标y值乘以10)。
5.压力和真空度
上图中显示了一个分布载荷(压力)。原点位于左上角高亮的节点上。
如何施加大小随空间位置变化的压力?
上图中,压力的大小是单元中心x和z坐标值的函数。
6.静水压力
土木工程的应用:大坝设计。机械工程应用:装液体的船只和水箱。
在上表面水压为零,在底部最大(= ρ* g * h)。如下图,它是线性变化的。
静水压力施加方法考虑了单元中心的位置,(垂向位置h)。
7.弯矩
约定力用单箭头表示,指向力的作用方向。
力矩用双箭头表示,方向由右手定则确定。
平板边上的节点受力矩作用,结果是节点有绕着Y轴(dof 5).旋转的趋势。
上图平板右侧边线受到弯矩作用。位移放大100倍,原始位置用线框表示。
上图施加在节点上的弯矩可以用添加刚性单元到每个节点上,再加上对应的力来模拟。这个例子中,RBE2的方向指向Z向,受力方向为X向,如下图所示。
进行后处理时确保将RBE2的结果排除在外(仅显示壳单元的位移结果)。
8.扭矩
什么是扭矩?扭矩和弯矩有什么区别?
扭矩是作用在轴向的弯矩(Mx)。
扭矩(Mx)产生剪切应力和角变形,另外两个方向的弯矩(My , Mz)产生正应力和轴向变形。
如何确定扭矩的方向,顺时针还是逆时针?
基于右手定则,拇指指向箭头的方向,其余手指的方向表明了扭矩的作用方向。
如何给实体单元施加扭矩(brick /tetra)?
实体单元在节点上没有转动刚度,只有三个方向平移自由度。一个常见的错误是直接将扭矩施加到实体单元的节点上。
在实体正确施加扭矩的方法是使用RBE2或者RBE3单元。刚体单元将扭矩转换为力分布到实体单元上。
刚性连接单元RBE2
使用刚性单元RBE2将中心节点连接到外部节点。然后扭矩施加到中心节点上。
另外你也可以用一个RBE3单元来代替:
独立节点选择轴边缘的外部节点。非独立节点可以自动确定。这个操作很简单。
然而,应当注意被引用的自由度。实体单元只有移动的三个自由度(自由度123)。非独立节点允许转动(自由度123456)。如果非独立点的转动自由度(本例中自由度5,y轴)没有被激活,扭矩不会被传递到独立节点。
包裹壳单元:
在brick/tetra实体单元的外表面覆盖一层quad/tria 2D单元。这些壳单元的厚度应该可以忽略的,那样不会影响结果。现在扭矩可以施加在表面节点上,大小是总扭矩/施加节点的数量。
使用HyperMesh可以方便地创建壳单元。使用Faces面板来创建表面。通过View > Toolbars > Checks
打开检查工具栏,点击按钮来打开FACES面板。
面单元(不是2dplot单元)自动创建并被存放于^faces的组件里。只需要将这些单元作为普通单元对待即可,(例如:重命名组建集合,指定材料和属性。)
上图中,使用了收缩单元的命令来显示轴的单元。橙色单元是实体单元,红色单元是实体单元自由表面的2d单元。
9.温度载荷
假设金属直尺自由平放在地面上,如下图所示。如果室温上升到50度,直尺内部会有应力产生吗?
答案是没有应力产生。它会因高温而膨胀(热应变)。只有妨碍它的变形才会产生应力。考虑另一种情况,这次钢尺的另一端被固定在墙上(墙不导热),如果温度上升,它将在固定端产生热应力,如下图所示。
热应力计算的输入数据需要节点的温度,室温,热传导率和线热膨胀系数。
10.重力载荷:指定重力方向和材料密度
需要一个卡片定义为GRAV的载荷集合。记住你的单位制。
11.离心载荷
用户需要输入角速度,转动轴和材料密度。
RFORCE卡片定义受离心力的静态载荷。
12.整车分析下的“G”值
垂向加速度(车辆驶过路面坑槽或紧急制动):3g
侧向加速度(转向力,车辆转向时产生):0.5-1g
轴向加速度(制动或突然加速时产生):0.5-1g
13.一个车轮通过沟槽
有限元模型应该包括所有的部件,不重要的部件可以用一个集中质量代替。车辆的质量和有限元模型的质量,实际轴荷与模型的轴荷,应该一致。
施加约束时,落入沟槽的车轮垂直的自由度应该自由。另外一个车轮应该适当约束来避免刚体位移。指定重力方向朝下,并且值为3*9810 mm/sec2 。
因为多数时侯我们没有整车的CAD数据或足够的时间来建立详细的模型,另外一个简单的近似方法是施加3倍的反作用力在落入沟槽的车轮上。假设车轮反作用力(测试数据)是1000N,因此施加3000N在车轮上,方向向上,并充分约束其他车轮避免刚体模态。这种方法对于两种设计的对比比较有效。
14.两个车轮掉入沟槽:
和上面讨论相同,假设两个轮子落入沟槽。一个车轮掉入会造成弯扭,两个车轮掉入则产生弯曲载荷。
15.制动:
沿着轴向(与车辆前进方向相反)的线性加速度(或重力)=0.5到1g
16.转向:
沿着侧向的线性加速度=0.5到1g
10.2 如何施加约束
初学者会发现很难施加边界条件,特别是约束。每个刚接触CAE的人都面临两个基本问题:
i)进行单个部件的分析,力和约束是加在单个部件上(类似自由体受力图)还是将周围连接的部件都考虑进去?
ii)在什么位置,约束多少个自由度?
约束用来限制结构出现相对刚体位移。
二维物体的约束
上图描述了二维物体在纸平面的运动。(来自:
https://www.360docs.net/doc/3b8890173.html,/engineering/CAS/courses.d/IFEM.d/IFEM.Ch07.d/IFEM.Ch07.pdf )如果物体没有被固定,施加的载荷力将引起无限的位移(例如有限元软件将报告刚体位移并且退出运行显示错误)。因此,不管载荷如何,物体必须在XY方向和绕Z轴转动方向被固定。这样约束二维物体的自由度至少有三个。
如上图a所示,A点约束了物体的移动自由度,与B点一起限制了物体的转动自由度。这个物体可以以任意方式自由扭曲,没有因为约束带来任何变形限制。
图b是图a的简化。AB线平行于全局的y轴。A点约束了x和y的移动自由度,B点约束了x的移动自由度。如果B点的滚动支座改成如图c,就可能产生绕A点的刚体转动(例如转动方向垂直于AB)。刚体位移将产生刚度矩阵奇异。
三维物体的约束
上图(来自:https://www.360docs.net/doc/3b8890173.html,/engineering/CAS/courses.d/IFEM.d/
IFEM.Ch07.d/IFEM.Ch07.pdf)说明了将自由度约束的概念扩展到三个维度。现在至少需要6个方向的自由度被约束并且有更多可能的组合。
如上例,A点约束三个方向的自由度,消除了刚体移动,但是还需要约束三方向的转动。B点约束了x 方向位移消除了绕z轴的转动,C点约束了z方向的位移从而消除了绕y轴的转动,D点约束y轴的位移从而消除了绕x轴的转动。
1.离合器壳体的分析
目标是(只)分析离合器壳体。离合器壳体连接在引擎和变速箱壳体上。分析有两种可能性:
方法1:分析中只考虑离合器壳体。因此,根据自由体受力图施加力和力矩,并且约束两个面所有的螺栓孔的所有自由度。
方法2:模型至少包括引擎和变速箱在接触部位的一部分(或者整个部件用粗糙的网格来代替,忽略细小特征)。然后前轴和后轴等其它部件用近似截面的梁单元表示。约束车轮的部分自由度(不是所有自由度只需约束刚体位移或使用惯性释放方法)。注意离合器壳体是分析的关键位置,网格应该画细些。
推荐采用第二种方法,它的刚度更合理,约束更接近现实。第一种方法,约束了离合器壳体的两个面,这种过约束将产生更安全的结果(应力和位移偏小)。另外,这种方法不能考虑到特殊的工况,比如一个或两个轮子陷入凹坑。
2.支架分析
问题:支架固定在刚性墙上,受到180kg的垂向力。
如果将这个问题交给不同公司的工程师,你会发现不同的CAE工程师施加的约束是各不相同的:
i.直接约束螺栓孔的边缘。
ii.用刚性单元/粱单元模拟螺栓,并且约束螺栓端部
iii.建立螺栓模型,约束螺栓端部和支架底部垂直于面的自由度
应力N/mm2
位移
mm
约束螺栓孔的边缘
993
15.5
Bolt –用粱单元模拟螺栓
770
16.2
用粱模拟螺栓,支架底部只
约束z 自由度
758
15.8
直接在孔边上施加约束产生了很高的应力。第二种方法显示支架底部边缘位移是不真实的。方法3是推荐方法。注意它们在应力和位移上的差别。
考虑到梁单元/刚性单元和壳/实体单元连接产生的高应力,忽略垫圈附近单元的高应力(垫圈部分和梁单元/刚性单元连接之外的一圈)是某些软件用户的标准做法。
如下图支架的另一种约束方法。本次支架用简化的螺钉/螺栓固定到了墙上。螺栓用刚性单元(RBE2)来模拟。
约束刚性单元中心的移动自由度(dof 1-3)
会发生什么呢?看起来这种约束和实际很相符(比如,支架安装于墙上),但这样约束允许中心点旋转,
因此,孔变形了(即使这种变形很小),如下图。
将上图的变形放大100倍。未变形的形状用线框显示。注意孔的变形是预期的变形吗?
将上图的变形放大100倍。未变形的形状用线框显示。孔的中心自由度全部被约束。孔的中心保持了圆形和初始位置不变。
另一个例子也显示了边界约束对结果的影响,如下图。悬臂梁的末端的节点自由度只约束移动自由度123。在另一端施加-x方向的均布力。
会发生什么呢?特别是在约束的附近?
如上图所示,末端所有节点的移动自由度都被约束了。将y方向和x方向变形分别放大200和5倍。未变形时的网格用橙色线框表示。注意悬臂梁底部变宽,相应的上部变薄了。
上图修改了悬臂梁的约束。约束端部节点的x和z方向的自由度。另外轴线对称部分约束y方向自由度。分别放大y和x方向的变形200和5倍。未变形时的网格用橙色线框表示。和之前的图相比,位移明显不同了。到底哪个计算结果是正确的呢?
通过RBE2和RBE3施加边界条件(约束和力),有什么不同?
上图孔用RBE2单元连接,约束中心的独立节点的所有自由度。
在看到仿真结果之前,先问一下自己,将会出现什么样的位移云图?
上图是位移场的云图。注意,孔的变形为零。换句话说,RBE2单元虚假的增强了孔局部的刚度。
下面,我们用RBE3单元来约束模型。注意RBE3单元的中心点是非独立节点,不能直接约束。因为节点的位移被孔上的独立节点和spc所控制。解决方法是在非独立点上添加一个Cbush单元(0长度和高刚度)。约束Cbush单元的自由端的全部自由度。
上图显示了RBE3的非独立节点如何与0长度的CBUSH单元连接。Cbush单元的自由端的全部自由度都被约束。CBUSH单元可以用spring面板来创建,面板位于Mesh > Create > 1D Elements > Springs。
为了创建CBUSH单元,首先要切换对应的默认单元类型CELAS到CBUSH,引用一个属性(也可以以后再指定),并选择弹簧单元的两端节点。dof1-6选项的选择不起作用。
CBUSH单元的属性定义如下图所示。
上图是位移的云图。孔用RBE3单元连接,并且连接一个高刚度的CBUSH单元。所有CBUSH自由端的自由度都被约束。
上图位移云图放大了200倍。孔由于压力而变形了。RBE3单元模拟了一种柔性的支撑,而RBE2单元模拟的是刚性的支撑。
3.压力容器自由放置于地面和平板两边受承受拉伸载荷
有时需要进行无约束结构分析,比如压力容器自由放置于地面(只是放置,不进行固定)或者一个平板两端承受相反的拉力而不受任何约束。静态分析不能求解这种无约束的问题。至少要约束一个节点,或者一些节点来阻止刚体位移。
如果要求解自由放置于地面压力容器(承受内压)或两端受拉的平板,没有任何约束,求解器会退出并给出奇异的信息,或者得到是不合实际的位置的高应力结果(如果打开自动奇异修正功能)。
有两种方法来求解这种无约束结构问题:
1)近似方法:在外部边缘或表面节点上创建弹簧/梁单元(可忽略的刚度),并且在弹簧或梁单元的自由端施加约束。
2)推荐方法:惯性释放方法或在模型中定义运动自由度(见教程RD-1030: 3D Inertia Relief Analysis using RADIOSS)
10.3 对称
使用对称的条件:
只有下面的条件同时满足时才能使用对称。
1)几何是对称的
2)边界条件(力和约束)是对称的
好处:可以用一半或四分之一的模型来进行分析,减少自由度数量和计算成本
对称面上哪些dof可以约束?
上图中,黑色垂直平面代表了中面。单元节点用灰色表示,节点转动用蓝色,绿色和红色箭头表示。红色和绿色箭头代表的节点转动应该从对称平面上的节点上去除(想象箭头是粘在节点上的)。因此这些自由度必须被约束。相反,代表节点转动自由度的蓝色箭头不用约束。因为实体单元的节点只有移动自由度,你只需要约束对称平面的移动。
上图是一个完整的模型。梁端面的移动自由度(dof123)被约束。中心作用有200N的垂直载荷。
如果对称面位于x-y平面,在其法向的位移自由度如z向(dof 3)需要被约束。另一方面,不需要约束旋转自由度,因为实体单元的节点没有旋转自由度。记住,对称面上的节点不能移动或旋转到对称平面之外。
上图是一半模型。在对称平面上,z方向的自由度被约束。另外,因为作用力只作用在一半结构上,所以大小减少了一半。
现在来考虑带孔的对称平板,它的两侧受到对称的载荷。
上图是一个作为参照的完整模型。
上图是完整模型的单元应力云图(von Mises)。
下一步,只研究平板的四分之一。对应的载荷和约束如下图所示。
上图是(von Mises)单元应力。
限制:对称边界条件不能用于动力学分析(自然频率和模态迭代求解器)。对称模型(一半部分)会丢失一些模态,如下图。
全模型与半个对称模型自然频率的对比。
Mode No.
Full model Hz Half symmetric model
Hz 1 448 448 2 449 718 3 718 1206 4 719 2078 5 1206 2672 6
1211
4397
问题:我们需要进行仿真来决定哪一种材料可以用来制作一个铸件。因为两种材料的弹性模量和泊松比是一样的,我们需要找出导致两种材料性能不同的参数。其次,我们也没有材料的应力应变曲线。
1)如果载荷是静态的(大多数情况下是静态,极少量动态),公司只有线性静态求解器:不同等级的铸铁有不同的强度极限(或比例屈服强度)。线性静态应力是独立于材料的,所有的材料将显示相同的应力。所以将基于强度极限(和疲劳极限)做出决定。比如FEA 计算得到最大应力是300Mpa 。材料1极限应力是350Mpa ,材料2是500Mpa 。这种情况下,当然选择第二种材料。考虑另外一种情况,假设FEA 得到最大
边界条件的设置
第二章:边界条件 这一章主要介绍使用边界条件的基本知识。边界条件能够使你能够控制物体之间平面、表面或交界面处的特性。边界条件对理解麦克斯韦方程是非常重要的同时也是求解麦克斯韦方程的基础。 §2.1 为什么边界条件很重要 用Ansoft HFSS求解的波动方程是由微分形式的麦克斯韦方程推导出来的。在这些场矢量和它们的导数是都单值、有界而且沿空间连续分布的假设下,这些表达式才可以使用。在边界和场源处,场是不连续的,场的导数变得没有意义。因此,边界条件确定了跨越不连续边界处场的性质。 作为一个 Ansoft HSS 用户你必须时刻都意识到由边界条件确定场的假设。由于边界条件对场有制约作用的假设,我们可以确定对仿真哪些边界条件是合适的。对边界条件的不恰当使用将导致矛盾的结果。 当边界条件被正确使用时,边界条件能够成功地用于简化模型的复杂性。事实上,Ansoft HFSS 能够自动地使用边界条件来简化模型的复杂性。对于无源RF 器件来说,Ansoft HFSS 可以被认为是一个虚拟的原型世界。与边界为无限空间的真实世界不同,虚拟原型世界被做成有限的。为了获得这个有限空间,Ansoft HSS使用了背景或包围几何模型的外部边界条件。 模型的复杂性通常直接与求解问题所需的时间和计算机硬件资源直接联系。在任何可以提高计算机的硬件资源性能的时候,提高计算机资源的性能对计算都是有利的。 §2.2 一般边界条件 有三种类型的边界条件。第一种边界条件的头两个是多数使用者有责任确定的边界或确保它们被正确的定义。材料边界条件对用户是非常明确的。 1、激励源 波端口(外部) 集中端口(内部) 2、表面近似 对称面 理想电或磁表面 辐射表面 背景或外部表面 3、材料特性 两种介质之间的边界 具有有限电导的导体 §2.3 背景如何影响结构 背景边界:所谓背景是指几何模型周围没有被任何物体占据的空间。任何和背景有关联的物体表面将被自动地定义为理想的电边界(Perfect E)并且命名为外部(outer)边界条件。你可以把你的几何结构想象为外面有一层很薄而且是理想导体的材料。 有耗边界:如果有必要,你可以改变暴露于背景材料的表面性质,使其性质与
基于有限元和边界元的噪声分析
half 重登录 隐身 控制面板 搜索 状态 展区 振动博客 论坛服务 退出 振动论坛 → 专题讨论区→ 噪声分析及控制→声学基础理论→[转帖]基于有限元和边界元的噪声 分析 复制本页地址 粘贴我的收件箱 (0) 您 是本帖的第42个阅读者 标题:[转帖]基于有限元和边界元的噪声 分析树形 打印 收藏 推荐 提交网摘 等级:本科生 威望:18 现金:308 经验:1107 魅力:627 文章:109 注册: 2005-07-24 活跃度: 活跃等级:①年迈乌龟 在线等级: van321 ▼楼主 物体受到激励后,必将会产生振动,由物体的振动而引起与之相接触的流体的振动(如空气),从而在流体中产生噪声。对流体的噪声分析可以在频率域内或者时间域内进行,可以采用流体与结构耦合的形式进行分析,也可以只采用流体的形式进行计算分析,可以计算内声场也可以计算外声场,例如对于汽车而言,可以计算内声场,也可以计算外声场。在低频范围内采用边界元或者有限元的方法,在高频内采用统计能量的方法,计算结果包括声场中任意一点处的声学响应,如声压、声强、声功率,还可以是某点处的响应函数,如声压函数、模态贡献量函数,还可以进行一些特殊的分析,如声学传递矢量分析、面板贡 献量分析和灵敏*分析,以及高频域内的统计 能量分析。 如图所示是某轿车的排气系统的有限元声学模型,图所示是该排气系统中消声器的声学 模型。 [转帖]基于有限元和边界元的噪声分析
排气系统的声学模型
消声器的声学模型 ?声学模态分析 声学模态类似于结构模态,声波在流体团中传播时,会引发流体的振荡,流体的振荡也是有一定的固有频率和振动样式(振型),通过声学模态计算可以计算出流体的声学共振频率,防止流体和流体周围的结构产生共振而引发共鸣。 图所示是排气系统的声学模态云纹图。
有限元边界条件和载荷
X边界条件和载荷 10.1边界条件 施加的力和/或者约束叫做边界条件。在HyperMesh中,边界条件存放在叫做load collectors的载荷集中。Load collectors可以通过在模型浏览器中点击右键来创建(Create > Load Collector)。 经常(尤其是刚开始)需要一个load collector来存放约束(也叫做spc-单点约束),另外一个用来存放力或者压力。记住,你可以把任何约束(比如节点约束自由度1和自由度123)放在一个load collector中。这个规则同样适用于力和压力,它们可以放在同一个load collector中而不管方向和大小。 下面是将力施加到结构的一些基本规则。 1.集中载荷(作用在一个点或节点上) 将力施加到单个节点上往往会出现不如人意的结果,特别是在查看此区域的应力时。通常集中载荷(比如施加到节点的点力)容易产生高的应力梯度。即使高应力是正确的(比如力施加在无限小的区域),你应该检查下这种载荷是不是合乎常理?换句话说,模型中的载荷代表了哪种真实加载的情形? 因此,力常常使用分布载荷施加,也就是说线载荷,面载荷更贴近于真实情况。 2.在线或边上的力 上图中,平板受到10N的力。力被平均分配到边的11个节点上。注意角上的力只作用在半个单元的边上。
上图是位移的云图。注意位于板的角上的红色“热点”。局部最大位移是由边界效应引起的(例如角上的力只作用在半个单元的边上),我们应该在板的边线上添加均匀载荷。 上述例子中,平板依然承受10N的力。但这次角上节点的受力减少为其他节点受力的一半大小。 上图显示了由plate_distributed.hm文件计算得到的平板位移的云图分布。位移分布更加均匀。 3.牵引力(或斜压力) 牵引力是作用在一块区域上任意方向而不仅仅是垂直于此区域的力。垂直于此区域的力称为压力。
(整理)FLUENT边界条件(2)—湍流设置.
FLUENT边界条件(2)—湍流设置 (fluent教材—fluent入门与进阶教程于勇第九章) Fluent:湍流指定方法(Turbulence Specification Method) 2009-09-16 20:50 使用Fluent时,对于velocity inlet边界,涉及到湍流指定方法(Turbulence Specification Method),其中一项是Intensity and Hydraulic Diameter (强度和水利直径),本文对其进行论述。 其下参数共两项, (1)是Turbulence Intensity,确定方法如下: I=0.16/Re_DH^0.125 (1) 其中Re_DH是Hydraulic Diameter(水力直径)的意思,即式(1)中的雷诺数是以水力直径为特征长度求出的。 雷诺数 Re_DH=u×DH/υ(2) u为流速,DH为水利直径,υ为运动粘度。 水利直径见(2)。 (2)水利直径 水力直径是水力半径的二倍,水力半径是总流过流断面面积与湿周之比。 水力半径 R=A/X (3) 其中,A为截面积(管子的截面积)=流量/流速 X为湿周(字面理解水流过各种形状管子外圈湿一周的周长) 例如:方形管的水利半径 R=ab/2(a+b) 水利直径 DH=2×R (4) 举例如下: 如果水流速度u=10m/s,圆形管路直径2cm,水的运动粘度为1×10-6 m2/s。 则 DH=2×3.14*r^2/(2*3.14*r)=2*3.14*0.01^2/(3.14*0.02)=0.01 r为圆管半径 Re_DH=u×DH/υ=10*0.02/10e-6=20000 I=0.16/Re_DH^0.125=0.16/20000^0.125=0.0463971424017634≈5%
边界元与有限元
边界元与有限元 边界元法boundary element method 定义:将力学中的微分方程的定解问题化为边界积分方程的定解问题,再通过边界的离散化与待定函数的分片插值求解的数值方法。 所属学科:水利科技(一级学科) ;工程力学、工程结构、建筑材料(二级学科) ;工程力学(水利)(三级学科) 边界元法(boundary element method)是一种继有限元法之后发展起来的一种新数值方法,与有限元法在连续体域内划分单元的基本思想不同,边界元法是只在定义域的边界上划分单元,用满足控制方程的函数去逼近边界条件。所以边界元法与有限元相比,具有单元个数少,数据准备简单等优点.但用边界元法解非线性问题时,遇到同非线性项相对应的区域积分,这种积分在奇异点附近有强烈的奇异性,使求解遇到困难。 简介 边界元法是在有限元法之后发展起来的一种较精确有效的工程数值分析方法。又称边界积分方程-边界元法。它以定义在边界上的边界积分方程为控制方程,通过对边界分元插值离散,化为代数方程组求解。它与基于偏微分方程的区域解法相比,由于降低了问题的维数,而显著降低了自由度数,边界的离散也比区域的离散方便得多,可用较简单的单元准确地模拟边界形状,最终得到阶数较低的线性代数方程组。又由于它利用微分算子的解析的基本解作为边界积分方程的核函数,而具有解析与数值相结合的特点,通常具有较高的精度。特别是对于边界变量变化梯度较大的问题,如应力集中问题,或边界变量出现奇异性的裂纹问题,边界元法被公认为比有限元法更加精确高效。由于边界元法所利用的微分算子基本解能自动满足无限远处的条件,因而边界元法特别便于处理无限域以及半无限域问题。边界元法的主要缺点是它的应用范围以存在相应微分算子的基本解为前提,对于非均匀介质等问题难以应用,故其适用范围远不如有限元法广泛,
内燃机零部件有限元计算中边界条件处理的研究
内燃机零部件有限元计算中边界条件处理的研究 * 孙 军 汪景峰 桂长林 (合肥工业大学机械与汽车工程学院 合肥 230009) 摘 要:有限元方法已经成为内燃机零部件应力和变形计算的主要手段,但是目前在内燃机零部件有限元分析中采用的边界条件是否合理,有无必要采用更符合实际的边界条件?本文以曲轴为例,模拟实际 状况,采用不同的边界条件进行了有限元计算。计算结果表明,边界条件处理对曲轴有限元分析结果影响很大。因此,为了提高内燃机零部件有限元计算结果的精度,非常有必要根据实际情况确定边界条件。 关键词:边界条件 有限元 内燃机中图分类号:TK412.4 文献标识码:A 文章编号:1671-0630(2005)03-0006-03 Study on Boundary Condition in Finite Ele ment Calculation for Parts of Internal Co mbustion Engi ne Sun Jun ,W ang Jingfeng ,Gui Changlin H efeiUn i v ersity of Techno l o gy (H efei 230009) Abst ract :The fi n ite ele m ent m et h od has beco m e the m a i n m eans to calcu late t h e stress and de f o r m ation o f parts for inter na l co m bustion engine .Bu,t whether the boundary conditi o ns used i n FE ana l y sis on parts o f i n -ter nal co m busti o n eng ine are reasonable ?Is it necessary to use the boundary condition ,wh ich ism ore adapta -b le to the facts ?As an exa m p le ,the crankshaft is ca lculated by FE usi n g d ifferent boundary conditi o ns that si m ulate factual conditi o ns .The resu lts sho w t h at the boundary conditi o ns have i m portant effects on the results of FE analysis o f crankshaf.t Therefo re ,it is necessary to choose boundary cond itions acco r d i n g to factua l con -d iti o n i n o r der to i m prove the prec isi o n of calcu l a ti n g resu lts for parts o f i n ternal co m bustion eng i n e .K eyw ords :Boundary conditi o n ,F i n ite ele m en,t I C eng i n e 前言 随着有限元计算技术的进步,有限元方法目前已 经成为内燃机零部件应力和变形计算的主要手段。内燃机零部件的有限元分析,类似于其他问题的有限元分析,边界条件的处理是否合理直接影响计算结果的精确性。本文以曲轴为例,分析目前采用的边界条件是否合理,有无必要采用更符合实际的边界条件。 目前在曲轴有限元计算中,载荷边界条件的处理(重点是作用在轴颈表面的力处理)基本采用的是定 型模式,其假设作用在轴颈上的载荷(其与曲轴轴承油膜压力对应)为分布载荷,沿轴线方向均布或呈抛物线分布,沿圆周方向呈余弦分布 [1~4] 。这种处理方 法简单易行,但其属于较理想的状况,因为实际曲轴轴承的油膜压力分布规律复杂,且随时间变化。沿轴向抛物线型的油膜压力分布规律仅适合于无限短且轴颈轴线与轴承孔中心线平行的滑动轴承,实际的曲轴轴承为有限长轴承,且由于受到诸多因素的影响,如载荷作用下轴的变形、轴承的制造与装配误差和轴的热变形 * 基金项目:国家自然科学基金资助项目(50175023) 作者简介:孙军(1960-),男,硕士,研究方向,内燃机现代设计理论与方法。 第34卷 第3期2005年6月小型内燃机与摩托车 S MALL I N TERNAL COM B UST I O N ENG I N E AND MOTORCYCLE Vo.l 34No .3 June .2005
有限元法与有限差分法的主要区别
有限元法与有限差分法的主要区别 有限差分方法(FDM)是计算机数值模拟最早采用的方法,至今仍被广泛运用。该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。有限差分法以Taylor级数展开等方法,把控制方程中的导数用网格节点上的函数值的差商代替进行离散,从而建立以网格节点上的值为未知数的代数方程组。该方法是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表达简单,是发展较早且比较成熟的数值方法。对于有限差分格式,从格式的精度来划分,有一阶格式、二阶格式和高阶格式。从差分的空间形式来考虑,可分为中心格式和逆风格式。考虑时间因子的影响,差分格式还可以分为显格式、隐格式、显隐交替格式等。目前常见的差分格式,主要是上述几种形式的组合,不同的组合构成不同的差分格式。差分方法主要适用于有结构网格,网格的步长一般根据实际地形的情况和柯朗稳定条件来决定。构造差分的方法有多种形式,目前主要采用的是泰勒级数展开方法。其基本的差分表达式主要有三种形式:一阶向前差分、一阶向后差分、一阶中心差分和二阶中心差分等,其中前两种格式为一阶计算精度,后两种格式为二阶计算精度。通过对时间和空间这几种不同差分格式的组合,可以组合成不同的差分计算格式。有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。采用不同的权函数和插值函数形式,便构成不同的有限元方法。有限元方法最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。在有限元方法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元内选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看为由每个单元基函数组成的,则整个计算域内的解可以看作是由所有单元上的近似解构成。在河道数值模拟中,常见的有限元计算方法是由变分法和加权余量法发展而来的里兹法和伽辽金法、最小二乘法等。根据所采用的权函数和插值函数的不同,有限元方法也分为多种计算格式。从权函数的选择来说,有配置法、矩量法、最小二乘法和伽辽金法,从计算单元网格的形状来划分,有三角形网格、四边形网格和多边形网格,从插值函数的精度来划分,又分为线性插值函数和高次插值函数等。不同的组合同样构成不同的有限元计算格式。对于权函数,伽辽金(Galerkin)法是将权函数取为逼近函数中的基函数;最小二乘法是令权函数等于余量本身,而内积的极小值则为对代求系数的平方误差最小;在配置法中,先在计算域内选取N个配置点。令近似解在选定的N个配置点上严格满足微分方程,即在配置点上令方程余量为0。插值函数一般由不同次幂的多项式组成,但也有采用三角函数或指数函数组成的乘积表示,但最常用的多项式插值函数。有限元插值函数分为两大类,一类只要求插值多项式本身在插值点取已知值,称为拉格朗日(Lagrange)多项式插值;另一种不仅要求插值多项式本身,还要求它的导数值在插值点取已知值,称为哈密特(Hermite)多项式插值。单元坐标有笛卡尔直角坐标系和无因次自然坐标,有对称和不对称等。常采用的无因次坐标是一种局部坐标系,它的定义取决于单元的几何形状,一维看作长度比,二维看作面积比,三维看作体积比。在二维有限元中,三角形单元应用的最早,近来四边形等参元的应用也越来越广。对于二维三角形和四边形电源单元,常采用的插值函数为有La grange插值直角坐标系中的线性插值函数及二阶或更高阶插值函数、面积坐标系中的线性插值函数、二阶或更高阶插值函数等。对于有限元方法,其基本思路和解题步骤可归纳为(1)建立积分方程,根据变分原理或方程余量与权函数正交化原理,建立与微分方程初边值问题等价的积分表达式,这是有限元法的出发点。(2)区域单元剖分,根据求解区域的形状及实际问题的物理特点,将区域剖分为若干相互连接、不重叠的单元。区域单元划分是采用有限元方法的前期准备工作,这部分工作量比较大,除了给计算单元和节点进行编号和确定相互之间的关系之外,还要表示节点的位置坐标,同时还需要列出自然边界和本质边界的节点序号和相应的边界值。(3)确定单元基函数,根据单元中节点数目及对近似解精度的要求,选择满足一定插
IDESA有限元分析_第6篇第26章 基于几何施加边界条件
第26章MasterFEM 教程:定义边界条件 前面的教程简单介绍了仿真分析的流程。本篇将介绍更多高级定义边界条件的内容(载荷和约束)。 用户将学会: ?创建约束和约束集。 ?创建载荷和载荷集。 ?创建边界条件集。 ?解算定义以上边界条件的模型。 ?创建均布载荷。 ?解算定义以上边界条件的模型。 ?比较不同工况下的结果。 开始前必备知识: 熟悉MasterFEM界面和创建零件。 熟悉在模型文件中管理零件。 熟悉拉伸特征和旋转特征的布尔运算。 熟悉仿真分析流程。 熟悉自由网格划分。 设置1/3 如果还没有运行一个新的模型文件,创建一个新文件并命名。 ·1·
·2· File Open 打开模型文件菜单 确信用户是在以下工作状态和任务当中 : 设置工作单位为毫米(mm) Options Units 设置2/3 工作内容:按照以下尺寸草绘封闭形状的图形。 提示 : 为什么:这个零件代表了典型机构连杆的应力集中部位。
工作内容: 命名零件 提示: 命名菜单 设置3/3 工作内容:创建一个和零件关联的有限元模型(FEM1)。 提示 保存模型文件。 File Save 警告! 如果软件提示用户保存模型文件,用户应选择:No 记住:只有教程中提示保存模型文件,而不是软件提示保存的时候,用户才可以执行保存文件操作。 为什么: 在上一次保存以后的错误操作不能撤销恢复,用户可以选择重新打开文件,恢复到上一次保存时的状态。 提示: ·3·
重新打开模型文件的快捷键:按Control-Z。 创建约束和约束集1/3 工作内容:全约束以下高亮表面。 怎样做: 表面上定义约束的菜单 OK 创建约束和约束集2/3 注意事项: 会产生约束符号。 在几何边缘、表面、顶点的约束用不同的颜色和符号表示。 ·4·
fluent边界条件设置
边界条件设置问题 1、速度入口边界条件(velocity-inlet):给出进口速度及需要计算的所有标量值。该边界条件适用于不可压缩流动问题。 Momentum 动量 thermal 温度 radiation 辐射 species 种类 DPM DPM模型(可用于模拟颗粒轨迹) multipahse 多项流 UDS(User define scalar 是使用fluent求解额外变量的方法) Velocity specification method 速度规范方法: magnitude,normal to boundary 速度大小,速度垂直于边界;magnitude and direction 大小和方向;components 速度组成Reference frame 参考系:absolute绝对的;Relative to adjacent cell zone 相对于邻近的单元区 Velocity magnitude 速度的大小 Turbulence 湍流 Specification method 规范方法
k and epsilon K-E方程:1 Turbulent kinetic energy湍流动能;2 turbulent dissipation rate 湍流耗散率 Intensity and length scale 强度和尺寸: 1湍流强度 2 湍流尺度=(L为水力半径)intensity and viscosity rate强度和粘度率:1湍流强度2湍流年度率 intensity and hydraulic diameter强度与水力直径:1湍流强度;2水力直径 2、压力入口边界条件(pressure-inlet):压力进口边界条件通常用于给出流体进口的压力和流动的其它标量参数,对计算可压和不可压问题都适合。压力进口边界条件通常用于不知道进口流率或流动速度时候的流动,这类流动在工程中常见,如浮力驱动的流动问题。压力进口条件还可以用于处理外部或者非受限流动的自由边界。 Gauge total pressure 总压supersonic/initial gauge pressure 超音速/初始表压constant常数 direction specification method 方向规范方法:1direction vector方向矢量;2 normal to boundary 垂直于边界
对有限元法 有限差分法 边界元法和模拟电荷法的粗略总结
对有限元法、有限差分法、边界元法和模拟电荷法的粗略总结: 有限元法(finite element method):将连续的求解域离散为一组单元的组合体,用在每个单元内假设的近似函数来分片的表示求解域上待求的未知场函数,近似函数通常由未知场函数及其导数在单元各节点的数值插值函数来表达。从而使一个连续的无限自由度问题变成离散的有限自由度问题。缺点是有限元必须同时对所有域内节点和边界节点联立求解,待求未知数多,要求解的方程规模大,导致输入数据多,计算的准备工作量大。 有限差分法(finite difference method):直接从微分方程出发,将求解区域划分为网格,近似地用差分、差商代替微分、微商,于是无限度的问题化成有限自由度的问题。这种方法在解决规则边界的问题时极为方便,但是正是由于这种限制而增加了它的局限性,即对于非规则边界的问题适用性较差。 边界元法(boundary element method):边界元法是在有限元法之后发展起来的一种较精确有效的工程数值分析方法。它以定义在边界上的边界积分方程为控制方程,通过对边界分元插值离散,化为代数方程组求解。它与基于偏微分方程的区域解法相比,由于降低了问题的维数,而显著降低了自由度数,边界的离散也比区域的离散方便得多,可用较简单的单元准确地模拟边界形状,最终得到阶数较低的线性代数方程组。又由于它利用微分算子的解析的基本解作为边界积分方程的核函数,而具有解析与数值相结合的特点,通常具有较高的精度。特别是对于边界变量变化梯度较大的问题,如应力集中问题,或边界变量出现奇异性的裂纹问题,边界元法被公认为比有限元法更加精确高效。由于边界元法所利用的微分算子基本解能自动满足无限远处的条件,因而边界元法特别便于处理无限域以及半无限域问题。边界元法的主要缺点是它的应用范围以存在相应微分算子的基本解为前提,对于非均匀介质等问题难以应用,故其适用范围远不如有限元法广泛,而且通常由它建立的求解代数方程组的系数阵是非对称满阵,对解题规模产生较大限制。对一般的非线性问题,由于在方程中会出现域内积分项,从而部分抵消了边界元法只要离散边界的优点。 模拟电荷法(charge simulation method):在实际工程计算中,电极表面上连续分布的束缚电荷的分布情况是未知的,不能直接由给定的边界条件解出。如果在计算场域之外设置n个被称为模拟电荷的离散电荷来等效代替这些待求的连续电荷分布,则根据等值替代前后条件不变的前提条件,即可求得各模拟电荷的量值,从而使场域内任意一点的电位与场强便可由各模拟电荷所产生的场量叠加而获得,以此作为原场的逼近解。相比较于有限元法和有限差分法,模拟电荷法的优点是无需封边、使计算问题的维数降低一维、能直接求解出场域内的任意点的场强、计算精度高。
边界条件中湍流设置
在入口、出口或远场边界流入流域的流动,FLUENT 需要指定输运标量的值。本节描述了对于特定模型需要哪些量,并且该如何指定它们。也为确定流入边界值最为合适的方法提供了指导方针。 使用轮廓指定湍流参量 在入口处要准确的描述边界层和完全发展的湍流流动,你应该通过实验数据和经验公式创建边界轮廓文件来完美的设定湍流量。如果你有轮廓的分析描述而不是数据点,你也可以用这个分析描述来创建边界轮廓文件,或者创建用户自定义函数来提供入口边界的信息。一旦你创建了轮廓函数,你就可以使用如下的方法: ● Spalart-Allmaras 模型:在湍流指定方法下拉菜单中指定湍流粘性比,并在在湍流粘性 比之后的下拉菜单中选择适当的轮廓名。通过将m_t/m 和密度与分子粘性的适当结合, FLUENT 为修改后的湍流粘性计算边界值。 ● k-e 模型:在湍流指定方法下拉菜单中选择K 和Epsilon 并在湍动能(Turb. Kinetic Energy )和湍流扩散速度(Turb. Dissipation Rate )之后的下拉菜单中选择适当的轮廓名。 ● 雷诺应力模型:在湍流指定方法下拉菜单中选择K 和Epsilon 并在湍动能(Turb. Kinetic Energy )和湍流扩散速度(Turb. Dissipation Rate )之后的下拉菜单中选择适当的轮廓名。在湍流指定方法下拉菜单中选择雷诺应力部分,并在每一个单独的雷诺应力部分之后的下拉菜单中选择适当的轮廓名。 湍流量的统一说明 在某些情况下流动流入开始时,将边界处的所有湍流量指定为统一值是适当的。比如说,在进入管道的流体,远场边界,甚至完全发展的管流中,湍流量的精确轮廓是未知的。 在大多数湍流流动中,湍流的更高层次产生于边界层而不是流动边界进入流域的地方,因此这就导致了计算结果对流入边界值相对来说不敏感。然而必须注意的是要保证边界值不是非物理边界。非物理边界会导致你的解不准确或者不收敛。对于外部流来说这一特点尤其突出,如果自由流的有效粘性系数具有非物理性的大值,边界层就会找不到了。 你可以在使用轮廓指定湍流量一节中描述的湍流指定方法,来输入同一数值取代轮廓。你也可以选择用更为方便的量来指定湍流量,如湍流强度,湍流粘性比,水力直径以及湍流特征尺度,下面将会对这些内容作一详细叙述。 湍流强度I 定义为相对于平均速度u_avg 的脉动速度u^'的均方根。 小于或等于1%的湍流强度通常被认为低强度湍流,大于10%被认为是高强度湍流。从外界,测量数据的入口边界,你可以很好的估计湍流强度。例如:如果你模拟风洞试验,自由流的湍流强度通常可以从风洞指标中得到。在现代低湍流风洞中自由流湍流强度通常低到0.05%。. 对于内部流动,入口的湍流强度完全依赖于上游流动的历史,如果上游流动没有完全发展或者没有被扰动,你就可以使用低湍流强度。如果流动完全发展,湍流强度可能就达到了百分之几。完全发展的管流的核心的湍流强度可以用下面的经验公式计算: ()81Re 16.0-?'≡H D avg u u I
有限元在传热学中的应用
有限元在传热学中的应用 ——温度场的有限元分析 摘要:热分析在许多工程应用中扮演着重要角色。有限元法是热分析中常用,高效的数值 分析方法。利用有限元法可以求解传热学中温度场的重要参数,在材料成型中,在铸造这一块有着重大意义。 1、有限元法的应用: 有限元法是随着电子计算机的发展迅速发展起来的一种现代计算方法,首先在连续力学领域——飞机结构静、动态特性分析中应用的一种有效的数值分析方法,随后也很广泛用于求解热传导、电磁场、流体力学等连续问题。在传热学中,如果导热物体的几何形状不规则,边界条件复杂,很难有解析解。解决这类问题的最好办法就是数值解法,而数值解法中最具实用性和使用最广泛的就是有限单元法。 2、有限元数值解法的基本思路: 将连续求解区域减走势只在节点处相连接的一组有限个单元的组合体,把节点温度作为基本未知量,然后用插值函数以节点温度表示单元内任意一点处温度,利用变分原理建立用以求解节点未知量(温度)是有限元法方程,通过求解这些方程组,得到求解区域内有限个离散点上的温度近似解,并以这些温度近似解代替实际物体内连续的温度分布。随着单元数目的增加,单元尺寸的减少。单元满足收敛要求。近似解就可收敛于精确解。 3、有限元数值解法的基本步骤 有限元法在工程实际中应用的广泛性和通用性,体现在分析许多工程问题是,如力学中的位移场和应力场分析,传热学中的温度场分析,流体力学中的流场分析,都可以归结为给定边界条件下求解其控制方程的问题,虽然各个问题中的物理性质不同,却可采用同样的步骤求解。具体步骤为(1):结构离散。(2):单元分析。(3):整体分析。(4):边界条件处理与求解。(5):结果后处理。 有限元分析实际问题的主要步骤为:建立模型,推倒有限元方程式,求解有限元方程组,数值结果表述。 4、用于传热学的意义 有限元法作为具有严密理论基础和广泛应用效力的数值分析工具,近年来,以由弹性平面问题扩展到空间问题,板壳问题。从固体力学扩展到流体力学、传热学等连续介质力学领域;它在工程技术中的作用,已从分析和校核扩展到优化设计。并和计算机辅助设计相结合,形成了完整的计算机辅助设计系统。它解决了传热学中边界条件复杂或呈非线性,有均匀内热源等传统方法无法求解的问题。 温度场方程
abaqus中边界条件的设置
精品文档 ABAQU 模型中的6个自由度,其中的坐标中编号是 1.2.3而不是常用的X.Y.Z 。因为模 型的坐标 系也可以是主坐标系或球坐标系等。 边界条件的定义方法主要有两种, 这两种方法 可以混合使用: 自由度1 ( U1):沿坐标轴1方向上的平移自由度。 自由度2( U2):沿坐标轴2方向上的平移自由度。 自由度3( U3):沿坐标轴3方向上的平移自由度。 自由度4( UR1):沿坐标轴1上的旋转自由度。 自由度5( UR1):沿坐标轴2上的旋转自由度。 自由度 6(UR1) 沿坐标轴 3上的旋转自由度。 2、约定的边界条件类型 反对称边界条件,对称面为与坐标轴 2垂直的平面,即 U1= U3= UR2=0; ZASYMM 反对 称边界条件,对称面为与坐标轴 3 垂直的平面,即 U1= U2= UR3=0; PINNED 约束所有 平移自由 度,即 U1=U2=U3=0; ENCASTRE 约束所有自由度(固支边界条件) ,即 5= U2=U3=UR 仁UR2=UR3=0. 精品文档 XSYMM 对称边界条件,对称面为与坐标轴 YSYMM 对称边界条件,对称面为与坐标轴 ZSYMM 对称边界条件,对称面为与坐标轴 1 垂直的平面,即 2 垂直的平面,即 3 垂直的平面,即 U1= UR2= UR3=0; U2= UR1= UR3=0; XASYMM 反对称边界条件,对称面为与坐标轴 1垂直的平面,即U2= U3= UR 仁0; YASYMM
欢迎您的下载, 资料仅供参考! 致力为企业和个人提供合同协议,策划案计划书,学习资料等等 打造全网一站式需求
有限元法有限差分法有限体积法的区别
有限差分方法(FDM)是计算机数值模拟最早采用的方法,至今仍被广泛运用。该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。有限差分法以Taylor级数展开等方法,把控制方程中的导数用网格节点上的函数值的差商代替进行离散,从而建立以网格节点上的值为未知数的代数方程组。该方法是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表达简单,是发展较早且比较成熟的数值方法。对于有限差分格式,从格式的精度来划分,有一阶格式、二阶格式和高阶格式。从差分的空间形式来考虑,可分为中心格式和逆风格式。考虑时间因子的影响,差分格式还可以分为显格式、隐格式、显隐交替格式等。目前常见的差分格式,主要是上述几种形式的组合,不同的组合构成不同的差分格式。差分方法主要适用于有结构网格,网格的步长一般根据实际地形的情况和柯朗稳定条件来决定。 构造差分的方法有多种形式,目前主要采用的是泰勒级数展开方法。其基本的差分表达式主要有三种形式:一阶向前差分、一阶向后差分、一阶中心差分和二阶中心差分等,其中前两种格式为一阶计算精度,后两种格式为二阶计算精度。通过对时间和空间这几种不同差分格式的组合,可以组合成不同的差分计算格式。 有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。采用不同的权函数和插值函数形式,便构成不同的有限元方法。有限元方法最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。在有限元方法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元内选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看为由每个单元基函数组成的,则整个计算域内的解可以看作是由所有单元上的近似解构成。在河道数值模拟中,常见的有限元计算方法是由变分法和加权余量法发展而来的里兹法和伽辽金法、最小二乘法等。根据所采用的权函数和插值函数的不同,有限元方法也分为多种计算格式。从权函数的选择来说,有配置法、矩量法、最小二乘法和伽辽金法,从计算单元网格的形状来划分,有三角形网格、四边形网格和多边形网格,从插值函数的精度来划分,又分为线性插值函数和高次插值函数等。不同的组合同样构成不同的有限元计算格式。对于权函数,伽辽金(Galerkin)法是将权函数取为逼近函数中的基函数;最小二乘法是令权函数等于余量本身,而内积的极小值则为对代求系数的平方误差最小;在配置法中,先在计算域内选取N个配置点。令近似解在选定的N个配置点上严格满足微分方程,即在配置点上令方程余量为0。插值函数一般由不同次幂的多项式组成,但也有采用三角函数或指数函数组成的乘积表示,但最常用的多项式插值函数。有限元插值函数分为两大类,一类只要求插值多项式本身在插值
Fluent出入口边界条件设置及实例解析.
问:用了很长时间的fluent ,但一直没有把压力出入口边界条件弄明白。请大侠给予正确指导... 有的文档说亚声速流下initial 是0或者不填,而有的出版物则把total 和initial 设置成几乎想等的值,或者差值为大气压,很困惑! 比如说在一个喷射(亚声速流)流场中,实际条件为喷嘴入口压力40MPa ,出口压力20MPa ,即流场内围压20MPa ,这时,在压力入口边界条件的总压、初始表压以及压力出口的表压分别应该设置多少?如果是超声速流,又有什么区别? 还有,operating condition下的operating pressure是否设置成0或者大气压有什么说法吗? A :有的出版物则把total 和initial 设置成几乎想等的值。 我在使用时一般也是采用这样的方法,严格来讲是有公式来计算的。但是这个值一般只是用于初始化,对结果影响不大,所以简单来讲就设置成和出口的一样。 这个值对流场的初始化有一定的影响,设置成0也不是不可以,但会增加迭代步数。 对于喷射而言,建议lz 将operating condition下的operating pressure设置为 0 ,即是绝对压力。 二 最近用Fluent 做模拟的时候一直在使用压力出口边界,对其中出口温度、组分浓度等值的设置不是很明白,就仔细看了下Fluent User Guide,对压力出口边界描述如下: Pressure outlet boundary conditions require the specification of a static (gauge pressure at the outlet boundary........All other flow quantities are extrapolated from the interior。因此,压力出口边界可以这样表述,即,给定出口压力,对流动中的其他物理量均有流场内部值差值得到。 那边界条件面板中设定的温度(等)值有什么用呢?
有限元、边界元、有限差分法的区别
有限元法、边界元法、有限差分法的区别和各自的优点 请问:有限元法、边界元法、有限差分法等方法有哪些区别和各自的优点?尤其是在声学方面。 谢谢! 网格的跑分上不同,差分要求模型规则,有限元可以是任意不规则模型, FEM: irregular grid-> easy to describe complex shape, hard in mesh generation \.a4hj FDM: regular mesh -> easy in grid generation, hard to describe complex shape=> less accurate than FEM BEM: irregular mesh in boundary -> mesh generation much easier than that of FEM. need much less computation resource than the above two. BUT need basic solution (Green function) at the boundary. 对于这个基础问题一定要搞清楚,不然有限元就无从谈起。 有限元法的优点是适应性强,自由边界条件自动满足,但是不适合计算大尺度,对于透射边界需单独处理,单 元太多的模型,计算速度慢i7g c1T `w5v 边界元法的优点是域内二维问题化成了边界一维问题来处理,自动满足透射边界,但是构造G函数非常麻烦有限差分法适合大尺度(如地震波),方法简单,计算速度快,但是边界处理太麻烦. :) :( :D :'( [quote]原帖由[i]jonewore[/i] 于2007-10-1 20:31 发表 [url=https://www.360docs.net/doc/3b8890173.html,/forum/redirect.php?goto=findpost&pid=1152036&ptid=7785 04][img]https://www.360docs.net/doc/3b8890173.html,/forum/images/common/back.gif[/img][/url]
有限元法求解问题的基本步骤
有限元法求解问题的基本步骤 1. 结构离散化 对整个结构进行离散化,将其分割成若干个单元,单元间彼此通过节点相连; 2. 求出各单元的刚度矩阵[K](e) [K](e)是由单元节点位移量{Q}(e)求单元节点力向量{F}(e)的转移矩阵,其关系式为:{F}(e)= [K](e) { O}(e); 3. 集成总体刚度矩阵[K]并写出总体平衡方程 总体刚度矩阵[K]是由整体节点位移向量{①}求整体节点力向量的转移矩阵,其关系式为{F}= [K] {①},此即为总体平衡方程。 4. 引入支撑条件,求出各节点的位移 节点的支撑条件有两种:一种是节点n沿某个方向的位移为零,另一种是节点n沿某个方 向的位移为一给定值。
5. 求出各单元内的应力和应变 对于有限元方法,其基本思路和解题步骤可归纳为: (1)建立积分方程,根据变分原理或方程余量与权函数正交化原理,建立与微分方程初边值问题等价的积分表达式,这是有限元法的出发点。 ⑵区域单元剖分,根据求解区域的形状及实际问题的物理特点,将区域剖分为若干相互连 接、不重叠的单元。区域单元划分是采用有限元方法的前期准备工作,这部分工作量比较大, 除了给计算单元和节点进行编号和确定相互之间的关系之外,还要表示节点的位置坐标,同时还需要列出自然边界和本质边界的节点序号和相应的边界值。 (3)确定单元基函数,根据单元中节点数目及对近似解精度的要求,选择满足一定插值条件 的插值函数作为单元基函数。有限元方法中的基函数是在单元中选取的,由于各单元具有规则的几何形状,在选取基函数时可遵循一定的法则。 (4)单元分析:将各个单元中的求解函数用单元基函数的线性组合表达式进行逼近;再将近 似函数代入积分方程,并对单元区域进行积分,可获得含有待定系数(即单元中各节点的参
流体力学有限元分析中的边界条件处理
流体力学有限元分析中的边界条件处理 梁启国 尹敏镐 赵永凯 高殿荣 燕山大学 大庆石化总厂 摘 要 阐述了流体力学有限元分析中应用流函数 - 涡量法时典型边界条件的处理方 法 ,并给出计算实例 . 关键词 有限元 涡 - 流函数法 边界条件 分类号 O357 . 1 引言 求解不可压缩粘性流体二维流动问题的数值方法有速度 - 压力法 、涡 - 流函数法和流函数法 ,其中涡 - 流函数法应用较广1 ~4 . 在应用涡 - 流函数法进行有限元分析时 ,数值边界条件的处理不但影响解的精度而且影响解的稳定性2 . 本文结合工程实际给出了在有限元分析中确定几种典型边界条件的方法. 0 边界条件的处理 如图 1 所示的沿背部台阶的不可压缩粘性流 体二维流动. C 点为角点. 在涡 - 流函数方程的求解过程中 , 不仅需要 知道边界上的流函数和涡量值 ,有时还要对边界 上的涡量值不断地进行修正. 下面分别讨论各种 边界上的流函数值和涡量值. 设Δ x 和Δy 分别为 x 方向和 y 方向的有限元划分网格间距 , i 和 j 分别 为 x 方向和 y 方向的步长指标. 1) 壁面边界处理 若壁面是不可渗透的 ,则沿壁面的流函数 Ψ 为常数. 一阶精度的壁涡公式为 : 1 图 1 沿背部台阶的边界条件 2 (Ψ i , j - Ψ i , j +1 ) Ωi , j c c + O (Δy ) ( 1) = (Δy ) 2 c 二阶精度的壁涡公式为 : 3 (Ψ i , j - Ψ i , j +1 ) Ωi , j + 1 + O ( (Δy ) 2 ) Ωi , j c c c ( 2) = (Δy ) 2 2 c 图 2 用内点上的 Ψ i , j +1 , Ωi , j +1 表示边界上的涡量值 . 二阶壁涡公 c c 式在大网格雷诺数和变网格情况下往往引起数值不稳定和计算不收敛 ; 一阶壁涡公式虽