西华大学 机器人创新实验报告
实验报告
(理工类)
课程名称: 机器人创新实验
课程代码: 学院(直属系): 机械工程与自动化学院
年级/专业/班:
学生姓名: 实验总成绩: 任课教师: 李炜
开课学院: 机械工程与自动化学院
实验中心名称: 机械工程基础实验中心
一、设计题目:制作巡线小车
二、成员分工:(5分)
三、设计方案:(整个系统工作原理和设计)(20分)
寻线小车的工作原理:
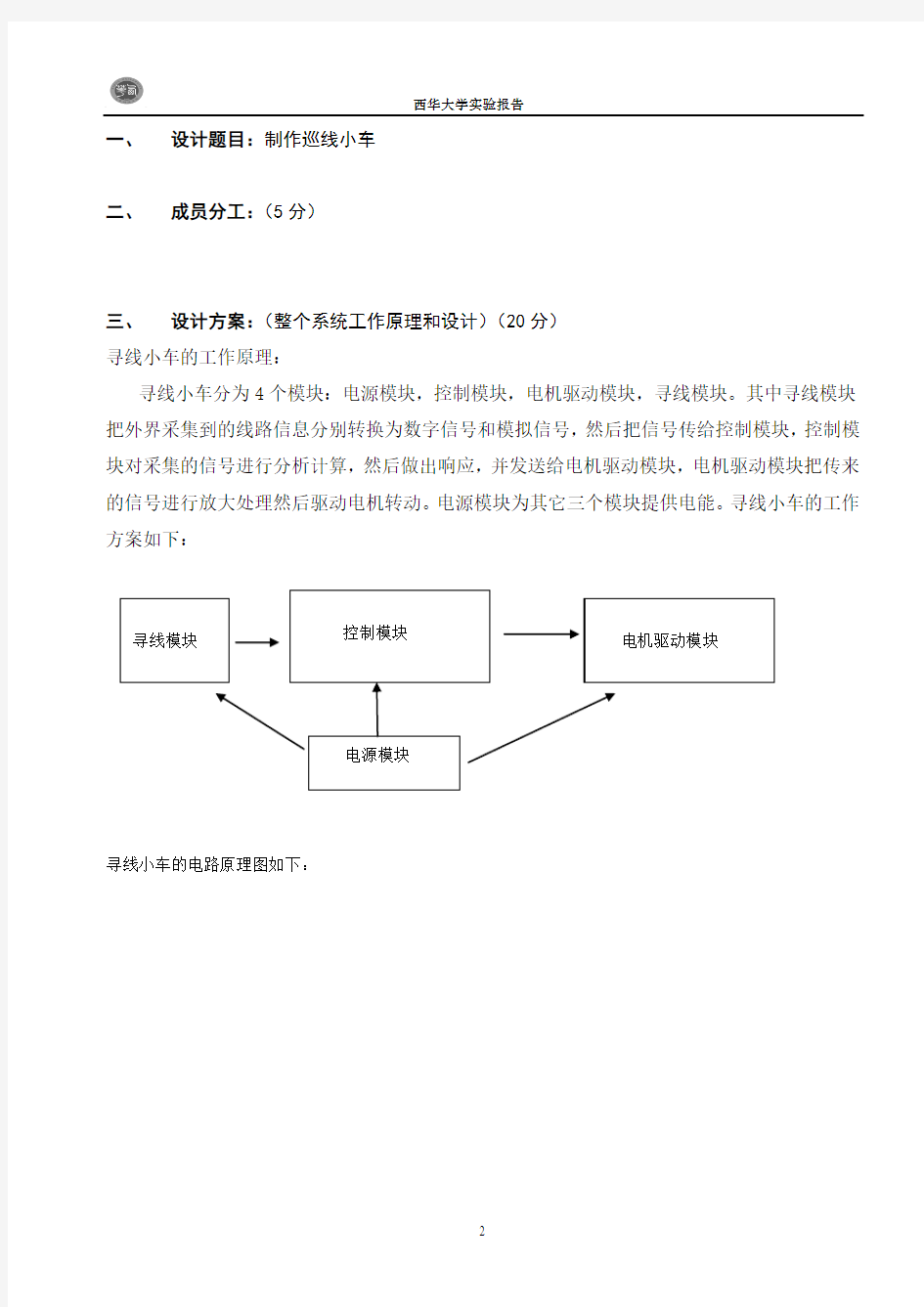
寻线小车分为4个模块:电源模块,控制模块,电机驱动模块,寻线模块。其中寻线模块把外界采集到的线路信息分别转换为数字信号和模拟信号,然后把信号传给控制模块,控制模块对采集的信号进行分析计算,然后做出响应,并发送给电机驱动模块,电机驱动模块把传来的信号进行放大处理然后驱动电机转动。电源模块为其它三个模块提供电能。寻线小车的工作方案如下:
寻线小车的电路原理图如下:
其中的寻线模板没有包括在内,寻线模块主要由三个红外线传感器和AD转换器组成,其数字输出端接在ATMEGA328P的3,4,5引脚,对应输入端口1,2,3。模拟量输出接在24,25,26引脚,对就芯片的A1,A2,A3模拟量输入端口。
系统的各个模块分别如下
控制模块:
ATMega328P的内部结构图
寻线模块:
寻线模块由三个红外线传感器和AD转换器组成。通过调节寻线模块上的旋钮,改变其相应的值,来分别是白线还是黑线。黑线输出的数字量为0,白线输出为1。而其模拟量是就接收光的多少,范围是0~1023。
电机驱动模块:
电机驱动芯片与电机的接线如下:
寻线小车寻线原理(简述):
寻线小车有三个传感器,分别为左、中、右三个。通过寻线模块所传送回来的数据量,确定转向。其真值表如下:
四、实验步骤:(图文说明设计过程中关键步骤)(30分)
巡线小车各个组件
Arduino UNO R3 控制器 1 块;
亚克力控制板 1 块;
电机2个;
普通轮子2个;
万向轮1个;
杜邦线1排;
电机驱动板1块;
寻线传感器3个;
电池盒1个;
螺钉螺母若干;
1将各个组件合理布局在亚力克板上,并标识出钻孔位置;2钻孔,然后安装电机万向轮普通车轮铜柱;
3安装三个传感器
4安装Arduino UNO R3 控制器和电机驱动版
5用杜邦线将各个模块连接
6 编写程序,并调试,直到小车能按照指定路线完整跑完。
五、最终作品展示:(图片及性能描述)(20分)
小车能够准确的沿着规定路线完整的跑完,即使跑道是曲线,直线,甚至是直角,八字形,小车都能平稳的巡线,美中不足的是小车速度不够快,原因是多方面的,还有待改善提高。
六、设计心得:(10分)
七、对本课程建议或意见:(选作题)
课程学时太短了一点,如果多增加一些课程,就可以在老师的介绍下了解更多的前沿机器人方面的知识,拓宽我们的视野。
附录:(设计文件、工程图、代码等)(15分)
int right=3;//
int center=2;//
int left=1;//
int aright=A3;
int acenter=A2;
int aleft=A1;
int vright=0;//
int vcenter=0;//
int vleft=0;//
int al[3]={0,0,0};
int mr1=5;//right motor,if this value if Hight,the motor will back
int mr2=6;//right motor,if this value if Hight,the motor will away;
int ml1=9;//left motor,if this value if Hight,the motor will back
int ml2=10;//left motor,if this value if Hight,the motor will away; int dct=0;//The direction of car
int spd[2]={0,0};//spd[0] is left mr,spd[1] is right.
int count=0;//
int vdl;
int vdr;
void setup() {
// put your setup code here, to run once:
pinMode(right,INPUT);
pinMode(left,INPUT);
pinMode(center,INPUT);
pinMode(mr1,OUTPUT);
pinMode(mr2,OUTPUT);
pinMode(ml1,OUTPUT);
pinMode(ml2,OUTPUT);
pinMode(aright,INPUT);
pinMode(acenter,INPUT);
pinMode(aleft,INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
vleft=digitalRead(left);
vcenter=digitalRead(center);
vright=digitalRead(right);
readAL();
vdl=al[1]-al[0];
vdr=al[1]-al[2];
if(vleft==LOW&&vcenter==LOW&&vright==LOW)//dct=0
{
HowToTurn();
}
else if(vleft==LOW&&vcenter==HIGH&&vright==HIGH)//turnLefts dct=3 {
turnLefts();
}
else if(vleft==LOW&&vcenter==LOW&&vright==HIGH){//dct==1
trunLeftf();
}
else if(vright==LOW&&vcenter==LOW&&vleft==HIGH)//dct=4
{
turnRightf();
}
else if(vright==LOW&&vcenter==HIGH&&vleft==HIGH)//dct=6
{
turnRights();
}
else if(vcenter==LOW&&vright==HIGH&&vleft==HIGH)//dct=5
{
run();
}
else if(vcenter==HIGH&&vleft==HIGH&&vright==HIGH)//dct=7
{
/*for(count=0;count<5;count++)
{
if(vcenter==HIGH&&vleft==HIGH&&vright==HIGH)
{
}
else
{
delay(20);
break;
}
}
if(count==5)
{
rollBack();
}*/
}
else//dec=2
{
readAL();
spd[0]=-(al[0]-al[1])/4; spd[1]=-(al[2]-al[1])/4; if(spd[0]>spd[1])
{
spd[1]=0;
spd[0]=spd[0]*2;
}
else
{
spd[0]=0;
spd[1]=spd[1]*2;
}
motorControl();
delay(20);
}
}
void readAL()
{
al[0]=analogRead(aleft);
al[1]=analogRead(acenter);
al[2]=analogRead(aright);
}
void motorControl()//control the motor {
if(abs(spd[0])<256&&abs(spd[1])<256) {
if(spd[0]>=0&&spd[1]>=0)
{
digitalWrite(mr1,LOW);
analogWrite(mr2,spd[1]);
digitalWrite(ml1,LOW);
analogWrite(ml2,spd[0]);
return;
}
else if(spd[0]>=0&&spd[1]<0)
{
digitalWrite(mr2,LOW);
analogWrite(mr1,abs(spd[1])); digitalWrite(ml1,LOW);
analogWrite(ml2,spd[0]);
}
else if(spd[0]<0&&spd[1]>=0)
{
digitalWrite(mr1,LOW);
analogWrite(mr2,spd[1]);
digitalWrite(ml2,LOW);
analogWrite(ml1,abs(spd[0]));
}
else if(spd[0]<0&&spd[1]<0)
{
digitalWrite(mr2,LOW);
analogWrite(mr1,abs(spd[1]));
digitalWrite(ml2,LOW);
analogWrite(ml1,abs(spd[0]));
}
}
}
/*void spdControl(int leftMax,int leftMin,int rightMax,int rightMin) //the speed of motor contorl
{
spd[0]+=a[0];
spd[1]+=a[1];
if(spd[0]>leftMax) {spd[0]=leftMax;}
else if(spd[0] if(spd[1]>rightMax){spd[1]=rightMax;} else if(spd[1] }*/ void stopM() { digitalWrite(mr2,LOW); analogWrite(mr1,LOW); digitalWrite(ml2,LOW); analogWrite(ml1,LOW); } void trunLeftf()//dct==1,turn left is not urgent { while(true) { readAL(); spd[0]=(al[1]-al[0])/4; spd[1]=(al[1]-al[2])/4; spd[1]=spd[1]+150; if(spd[1]>255) spd[1]=255; //spdControl(); motorControl(); delay(20); vleft=digitalRead(left); vcenter=digitalRead(center); vright=digitalRead(right); if(vleft==LOW&&vcenter==LOW&&vright==HIGH){ } else{break;} } dct=1; } void turnLefts() { while(true) { readAL(); spd[0]=(al[1]-al[0])/4; spd[1]=255; spd[0]=spd[0]/1.2; //spdControl(); motorControl(); delay(20); vleft=digitalRead(left); vcenter=digitalRead(center); vright=digitalRead(right); if(vleft==LOW&&vcenter==HIGH&&vright==HIGH){ } else{break;} } dct=3; } void turnRightf() { while(true) { readAL(); spd[0]=(al[1]-al[0])/4; spd[1]=(al[1]-al[2])/4; spd[0]=spd[0]+150; if(spd[0]>255) spd[0]=255; //spdControl(); motorControl(); delay(20); vleft=digitalRead(left); vcenter=digitalRead(center); vright=digitalRead(right); if(vleft==HIGH&&vcenter==LOW&&vright==LOW){ } else{break;} } dct=4; } void turnRights() { while(true) { readAL(); spd[1]=(al[1]-al[2])/4; spd[0]=255; spd[1]=spd[1]/1.2; //spdControl(); motorControl(); delay(20); vleft=digitalRead(left); vcenter=digitalRead(center); vright=digitalRead(right); if(vleft==HIGH&&vcenter==HIGH&&vright==LOW){ } else{break;} } dct=6; } void HowToTurn() { while(true) { readAL(); spd[1]=(al[1]-al[2])/4; spd[0]=(al[1]-al[0])/4; spd[0]=spd[0]+180; spd[1]=spd[1]+180; if(spd[0]>255) spd[0]=255; if(spd[1]>255) spd[1]=255; //spdControl(); motorControl(); delay(20); vleft=digitalRead(left); vcenter=digitalRead(center); vright=digitalRead(right); if(vleft==LOW&&vcenter==LOW&&vright==LOW){ } else{break;} } dct=0; } void rollBack() { while(true) { readAL(); spd[0]=-180; spd[1]=-180; 机器人创新实验(1)报告 摘要 机器人作为20世纪人类最为伟大的发明之一,自60年代问世以来,经历40余年的发展已经取得长足的进步。近年来随着社会的进步和科学技术的迅猛发展,特别是在微电子技术、信息技术,计算机技术,材料技术等科学技术迅速的支持下,机器人的种类日益繁多,性能不断改进,工作领域也在不断地扩大。已经引起了各国科学家的普遍关注。许多发达国家均把机器人技术的开发,研究列入高新技术发展计划。并且已经取得了很大的进展,它的成果将成为各行各业提高生产力的强有力的工具。此机器人是针对目前交通事故频发设计的。利用三轮作为活动方式,通过三个传感器进行感应障碍识别,从而进行控制汽车的运动及时避免各种障碍物。从电影<<机械公敌>>里可以看到机器人的前景,以及注意机器人的弊端。 关键词: 机器人,工具,传感器,障碍物 一、实验目的 1、在保证整个稳定的前提下,将程序写入控制卡,熟悉 软件调试机器人运动步态的技巧,熟悉直流电机的控制,并实现提前设定好的动作步骤,并使机器人能够平稳的运动。 2、熟悉掌握各种搭建元件的使用方法和电机舵机的使用技巧 3、学会对学习知识的应用到实际中的能力,提高自身动手能力。 二.实验器材 探索者,电脑软件TKScop, 我们用到的探索者: 三.组员 项博、张君心、刘小龙 三、实验步骤 1.第一阶段:老师对我们介绍实验内容,对需要用到的配件、软件环境进行讲解,为使我们对实验内容更加熟悉,对软件环境的熟悉。 2.第二阶段:开始动手阶段,为了能使我们小组更好的完成创新实验课程,我们机器人模仿机器人案列制造了简单的机器人,其中有一些改动。 第二阶段成品展示 3.第三阶段:开始创新阶段,在第二阶一定经验的基础上,我们对其进行了创新和改组。其中包括前轮和驱动装置,还有传感器的数量,主要对机器小车的CPU 内部的程序进行了修改,让其实现了第二阶段没有实现的动作。 第三阶段成果 4.第四阶段:老师评价,总结成功与失败。 四、机械结构、控制接线方法、程序、程序流程图说明: 控制线接线方法: 1、2、3、4为传感器接口 5红外接收端口 6手柄ABC三通道的选择键 7程序写保护,on允许下载 反之不允许,如果要运行板载程序,则转换到非on 状态 8为程序下载接口,连接usb转串口线 9舵机接口,共六组。可接标准舵机和圆周舵机。舵机黑色线朝下,三针,最上针空余。10输出端口,共2组,可接LED灯和语音模块 计算机专业类课程 实 验 报 告 课程名称:汇编语言程序设计 学院:计算机科学与工程 专业:计算机科学与技术 学生姓名:郭小明 学号:2011060100010 日期:2013年12月24日 电子科技大学 实验报告 实验一 学生姓名:郭小明学号:2011060100010 一、实验室名称:主楼A2-412 二、实验项目名称:汇编源程序的上机调试操作基础训练 三、实验原理: DEBUG 的基本调试命令;汇编数据传送和算术运算指令 MASM宏汇编开发环境使用调试方法 四、实验目的: 1. 掌握DEBUG 的基本命令及其功能 2. 学习数据传送和算术运算指令的用法 3.熟悉在PC机上编辑、汇编、连接、调试和运行汇编语言程序的过程五、实验内容: 编写程序计算以下表达式: Z=(5X+2Y-7)/2 设X、Y的值放在字节变量VARX、VARY中,结果存放在字节单元VARZ中。 1.编辑源程序,建立一个以后缀为.ASM的文件. 2.汇编源程序,检查程序有否错误,有错时回到编辑状态,修改程序中错误行。无错时继续第3步。 3.连接目标程序,产生可执行程序。 4.用DEBUG程序调试可执行程序,记录数据段的内容。 六、实验器材(设备、元器件): PC机,MASM软件平台。 七、实验数据及结果分析: 程序说明: 功能:本程序完成Z=(5X+2Y-7)/2这个等式的计算结果求取。其中X 与Y 是已知量,Z是待求量。 结构:首先定义数据段,两个DB变量VARX与VARY(已经初始化),以及结果存放在VARZ,初始化为?。然后定义堆栈段,然后书写代码段,代码段使用顺序程序设计本程序,重点使用MOV和IMUL以及XOR,IDIV完成程序设计。详细内容见程序注释。 程序清单: 光杠杆测量杨氏模量实验的改进 李XX (重庆交通大学土木建筑学院,重庆市南岸区,400074) 摘要:测量杨氏模量中常用光杠杆来测量加载重物后的微小形变量△L,而光杠杆在使用前要先调节镜尺之间的相对位置,在用传统光杠杆调节时比较麻烦。本实验通过对传统光杠杆装置作了一点改进,取消了传统光杠杆中的望远镜,而改用光斑来指示标尺上的读数。用这种改进后的光杠杆能快速调节光杠杆,且不会在调节与读取数据过程中使眼睛疲劳,大大提高了实验的效率。 关键词:杨氏模量,激光,光杠杆,仪器改进 中文分类号:文献标识码: 引言:杨氏模量是描述固体材料抵抗形变能力的重要物理量,是工程技术上极为重要的常用参数,是工程技术人员选择材料的重要依据之一。测量杨氏模量的方法较多,本文主要介绍用改进后的光杠杆测量杨氏模量。 1 传统光杠杆的缺点 传统光杠杆在使用时要先调节光杠杆、望远镜和标尺之间的相对位置,使在望远镜中能看清平面镜内反射的标尺的像,这就是这个实验的难点。在做这个实验的时候,我们发现这个调节过程是相当麻烦的,而且当我们调节好后如果稍不小心,轻轻碰一下实验装置,便前功尽弃,又得重调,这让我们相当苦恼。我们用传统光杠杆调节了很久才使望远镜中能看到标尺的像,而且调节过程中眼睛非常疲劳,对视力非常不好。 2 实验装置的改进及实验原理 针对传统光杠杆的不足,且为了提高做实验的效率,我对光杠杆进行一些改进,使得改进后的光杠杆使用起来更为方便。我们可以不用望远镜,而在原来望远镜处放置一个能发射光点的光源。使该光源发出的光经光杠杆的平面镜反射后又射在标尺上。则先后之间两个光点的高度差就是经光杠杆放大了的微小形变。 2.1 改进措施及改进后光杠杆的原理 因为氦-氖激光平行性好,能量集中,在各种常用的激光器中,氦-氖激光器输出激光的单色性最好以便能方便精确的在标尺上读数。此外,它还具有结构简单、使用方便、成本低等优点。因此我们用氦-氖激光器作为发射光点的光源。 在标尺中央零刻度处开一个小孔,将氦-氖激光发射器与标尺固连,且使其发出的光从小孔处穿过且光路与标尺面垂直。如图所示: 设由激光器发出的光开 始时反射到标尺上所指的刻度 为S0,当钢丝长度变化时,光杠 杆一端下降。并带动镜面转动。 设转角为θ,则激光光线转过 2θ。设标尺上激光光点对应的 读数为S ,令△δ = S - S0 . 当△L<< b 时,tanθ=△L / b ≈θ,tan2θ=△δ/ D≈2θ , 则有:△L=b*△δ/(2D) (1),所以△L被放大了2D / b 倍. 2.2 用拉伸法测金属丝的杨氏模量的原理 杨氏模量是反映固体材料形变与应力关系的物理量。本实验中形变为拉伸形变,即金属丝仅发生轴向拉伸形变。设金属丝长度为L,横截面积为S,沿长度方向受一外力F后金属丝伸长△L,称为线应变。实验结果表明:在弹性形变范围内,正应力与线应变成正比,即:F / S=Y*△L/L (2) , Y称为杨氏模量,微小形变△L用上面的光杠杆测量。由(1)、(2)得,杨氏模量Y=8*F*L*D/(π*d^2*b*△δ) ,其中d为钢丝直径。 浙江海洋学院 物理创新设计实验报告 实验名称:利用霍尔效应法测量空间的磁场分布指导教师:鲁晓东 专业:数学与数学应用 班级:B10数学 实验者:于祥雨吴联帅 学号:100601108 100601118 实验日期:2011年12月01日 利用霍尔效应法测量空间的磁场分布 实验者:于祥雨 同组实验者:吴联帅 指导老师:鲁晓东 (B10数学 100601108 654495 ;B10数学 100601118 670903) 【摘要】通过霍尔效应法测量霍尔电流和励磁电流的方法,并使用“对称测量法”消除副效应的影响,最终通过多组数据的处理,得出空间磁场分布。 【关键词】霍尔效应;霍尔电流;对称测量法;磁场分布 一、引言 空间磁场实际存在,但是人眼看不到,因此用直接的方法测量是行不通的。本实验正是考虑了这点,通过测量霍尔电流和励磁电流的方式,通过霍尔电流、励磁电流和磁场强度的关系,间接的测出磁场强度。并结合多组数据的处理,最大程度减小误差,使实验更加科学、严谨,从而使得实验方法具有可实施性和借鉴性。 二、设计原理 2.1简介 置于磁场中的载流体,如果电流方向与磁场垂直,则在垂直于电流和磁场的方向会产生一附加的横向电场,这一现象是霍普金斯大学研究生霍尔于1879年发现的,后被称为霍尔效应。如今霍尔效应不但是测定半导体材料电学参数的主要手段,而且利用该效应制成的霍尔器件已广泛用于非电量的电测量、自动控制和信息处理等方面。在工业生产要求自动自动检测和控制的今天,作为敏感元件之一的霍尔器件,将有更广泛的应用前景。掌握这一富有实用性的实验,对日后的工作将有益处。 2.2霍尔效应 霍尔效应是磁电效应的一种,当电流垂直于外磁场通过导体时,在导体的垂直于磁场和电流方向的两个端面之间会出现电势差,这个电势差就被叫做霍尔电势差。 导体中的载流子在外加磁场中运动时,因为受到洛仑兹力的作用而使轨迹发生偏移,并在材料两侧产生电荷积累,形成垂直于电流方向的电场,最终使载流子受到的洛仑兹力与电场斥力相平衡,从而在两侧建立起一个稳定的电势差即霍尔电压。正交电场和电流强度与磁场强度的乘积之比就是霍尔系数。平行电场和电流强度之比就是电阻率。 因此,对于一个已知霍尔系数的导体,通过一个已知方向、大小的电流,同时测出该导体两侧的霍尔电势差的方向与大小,就可以得出该导体所处磁场的方向和大小。 2.3实验原理 霍尔效应从本质上讲是运动的带电粒子在磁场中受洛伦兹力作用而引起的偏转。当带电粒子(电子或空穴)被约束在固体材料中,这种偏转就导致在垂直电流和磁场方向上产生正负电荷的聚积,从而形成附加的横向电场,即霍尔电场H E 。如图2-1所示的半导体式样,若在X 方向通以电流H I ,在Z 方向加磁场B ,则在Y 方向即试样2-4电极两侧就开始聚集异号电荷而产生相应的附加电场。电场的指向取决于试样的导电类型。对图2-1所示的N 型试样,霍尔电场为Y -方向。显然,霍尔电场H E 是阻止载流子继续向侧面偏移,当载流子所受的横向电场力H eE 与洛伦兹力evB 相等,样品两侧电荷的积累就达到动态平衡,故: H eE evB = (2.3.1) 其中H E 为霍尔电场,v 是载流子在电流方向上的平均漂移速度。 实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心 一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品) 目录 (一)模具设计过程 (1) (二)钻床接线 (6) (三)创新设计 (9) (四)总结 (10) (一)模具设计过程 一:实验目的 (1)了解注射成型模具的常见类型及结构 (2)掌握注射模具的整体结构及单分型面模具的拆装 (3)了解注射成型模具的组成部分的结构和功能 成型原理:将颗粒状或粉状塑料加热熔化呈流动态后,以高压和较快的速度注入温度较低的闭合模腔中,在模具的冷却作用下固化并定型,得到具有特定形状和质量的塑件。 二:实验要求 (1)对新拆装模具零件进行测绘,按要求画出相应的零件结构图 (2)熟悉拆装过程及有关的操作规则 三:准备工作 (1)选择注塑模具一副 (2)选择好必要的操作工具:包括内角扳手、钳工台、旋具、润滑油、等(3)选择好测量工具:钢直尺、游标卡尺、等量具(注意:测量取整数)四:模具的拆装步骤 (1)上下模分离,左右分别摆放 (2)冲出定位销,松动内六角螺钉,将上下模分别拆分,并按顺序摆放(3)对拆分的模具进行测量并作好记录 (4)安装从下往上的顺序进行组装,并上好润滑油 五:模具的绘制 (1)定模座板 1:拉伸出带四个销孔和一个浇注口的实体2:拉伸出定位圈 (2)型腔板 1:拉伸出下半面为弧形的实体 2:拉伸切除销孔 (4)动模板 1:拉伸出上半部分为弧形的实体2:拉伸切除销孔 (五)顶针固定板 1:拉伸出固定板 2:拉伸出各个顶针和导柱(六)左右模板 1:拉伸出带孔的实体 2:倒角 (七)推板 1:拉伸出带孔实体 2:倒角 (八)动模底板 1:拉伸出带孔实体 2:倒角 (九)销钉及螺丝钉 销钉可用拉伸做出,螺丝钉可用拉伸和混合扫描切口做出(十)组装 电子科技大学 电子技术实验报告 学生姓名:班级学号:考核成绩:实验地点:仿真指导教师:实验时间: 实验报告内容:1、实验名称、目的、原理及方案2、经过整理的实验数据、曲线3、对实验结果的分析、讨论以及得出的结论4、对指定问题的回答 实验报告要求:书写清楚、文字简洁、图表工整,并附原始记录,按时交任课老师评阅实验名称:负反馈放大电路的设计、测试与调试 一、实验目的 1、掌握负反馈电路的设计原理,各性能指标的测试原理。 2、加深理解负反馈对电路性能指标的影响。 3、掌握用正弦测试方法对负反馈放大器性能的测量。 二、实验原理 1、负反馈放大器 所谓的反馈放大器就是将放大器的输出信号送入一个称为反馈网络的附加电路后在放大器的输入端产生反馈信号,该反馈信号与放大器原来的输入信号共同控制放大器的输入,这样就构成了反馈放大器。单环的理想反馈模型如下图所示,它是由理想基本放大器和理想反馈网络再加一个求和环节构成。 反馈信号是放大器的输入减弱成为负反馈,反馈信号使放大器的输入增强成为正反馈。四种反馈类型分别为:电压取样电压求和负反馈,电压取样电流求和负反馈,电流取样电压求和负反馈,电流取样电流求和负反馈。 2、实验电路 实验电路如下图所示,可以判断其反馈类型累电压取样电压求和负反馈。 3.电压取样电压求和负反馈对放大器性能的影响 引入负反馈会使放大器的增益降低。负反馈虽然牺牲了放大器的放大倍数,但它改善了放大器的其他性能指标,对电压串联负反馈有以下指标的改善。 可以扩展闭环增益的通频带 放大电路中存在耦合电容和旁路电容以及有源器件内部的极间电容,使得放大器存在有效放大信号的上下限频率。负反馈能降低和提高,从而扩张通频带。 电压求和负反馈使输入电阻增大 当 v一定,电压求和负反馈使净输入电压减小,从而使输入电流 s 大学物理实验报告优秀模板 大学物理实验报告模板 实验报告 一.预习报告 1.简要原理 2.注意事项 二.实验目的 三.实验器材 四.实验原理 五.实验内容、步骤 六.实验数据记录与处理 七.实验结果分析以及实验心得 八.原始数据记录栏(最后一页) 把实验的目的、方法、过程、结果等记录下来,经过整理,写成的书面汇报,就叫实验报告。 实验报告的种类因科学实验的对象而异。如化学实验的报告叫化学实验报告,物理实验的报告就叫物理实验报告。随着科学事业的日益发展,实验的种类、项目等日见繁多,但其格式大同小异,比较固定。实验报告必须在科学实验的基础上进行。它主要的用途在于帮助实验者不断地积累研究资料,总结研究成果。 实验报告的书写是一项重要的基本技能训练。它不仅是对每次实验的总结,更重要的是它可以初步地培养和训练学生的逻辑归纳能力、综合分析能力和文字表达能力,是科学 论文写作的基础。因此,参加实验的每位学生,均应及时认真地书写实验报告。要求内容实事求是,分析全面具体,文字简练通顺,誊写清楚整洁。 实验报告内容与格式 (一) 实验名称 要用最简练的语言反映实验的内容。如验证某程序、定律、算法,可写成“验证×××”;分析×××。 (二) 所属课程名称 (三) 学生姓名、学号、及合作者 (四) 实验日期和地点(年、月、日) (五) 实验目的 目的要明确,在理论上验证定理、公式、算法,并使实验者获得深刻和系统的理解,在实践上,掌握使用实验设备的技能技巧和程序的调试方法。一般需说明是验证型实验还是设计型实验,是创新型实验还是综合型实验。 (六) 实验内容 这是实验报告极其重要的内容。要抓住重点,可以从理论和实践两个方面考虑。这部分要写明依据何种原理、定律算法、或操作方法进行实验。详细理论计算过程. (七) 实验环境和器材 实验用的软硬件环境(配置和器材)。 (八) 实验步骤 只写主要操作步骤,不要照抄实习指导,要简明扼要。还应该画出实验流程图(实验装置的结构示意图),再配以 智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间: 实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。 (四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。 《机械创新设计方法》结课报告设计题目:脚踏儿童滑板车 学生姓名:刘凡 学号: 103004010303 班级:机制1003 任课教师:张融 2011 年 5 月 29 日 1. 运用《机械创新设计方法》课程所学的创新思维、创新技法,以及机械系统方案设计、机构设计、结构设计等方面的创新知识,针对某一你所熟悉的产品、设备或零件,提出你在上述某一方面的具体的创新与改进措施。 2. 设计课题在主题框架内可自行确定,课题可以是机构设计,结构设计,外观设计,创新设计等; 3. 每个课题可一人一题,也可两人或三人一题,但需要有较明确的分工; 一.拟定设计任务书 1.设计原由 脚踏儿童滑板车是时下一种时尚的运动休闲工具,深受广大儿童的喜爱。脚踏儿童滑板车适合3-5岁左右的孩子玩耍。脚踏儿童滑板车是继滑板车几年前在我国流行之后的又一儿童运动健身类玩具。脚踏儿童滑板车的前身是比较专业型滑板车改进而来。而滑板车是继滑板之后的又一类运动型新产品,名副其实--滑板车(Bicman),速度可以达到20公里/时,这种新型产品来源于世界科技先进大国日本,但却是一位德国工人发明的,它是一种简单的省力运动机械。 早在三年前,滑板车已经传入我国,只不过当时价格太高,很少人对它产生兴趣。直到这阵子,它的价格猛然下降,加上产家们对它加紧疯狂推销,使它"人气大旺",最重要的是玩滑板车必须有高度的悟性和胆量,这正符合想象力丰富,喜欢挑战的青少年们的口味,如今滑板车已成为青少年新一代的潮流运动产品。可见,它的魅力可不逊于滑板哦!所以我们对其进行改进由原来的脚滑变成脚踏!这个设计是基于个人创意一个大的提升,希望我的设计能给小朋友带来更多的乐趣,给企业带来效益! 2.设计技术条件 1.设计技术条件需要速练得掌握SolidWorks软件的基本操作,通过SolidWorks软件设计出零件的模型,然后零件图组装成装备体,最后生成二维工程图。 2.设计零件的前提是掌握齿轮齿合条件,计算出一些技术参数后方可画出齿合的齿轮。掌握蜗轮蜗杆的齿合条件,并比较两者的优缺点,选取最佳方案. 二.功能原理与工作原理分析 功能原理:脚踏踏板,踏板带动棘轮,棘轮带动齿轮,齿轮带动车轴,最后车轮前进。 工作原理:就是利用脚踏带动棘轮,棘轮将速度传递给齿轮,这样就可以带动小车不断前进。 三.国内外同类产品现状 在驱动方式上国内有许多不同点,有人力驱动的,有电能驱动,但总体来说都朝着使使用者更加舒适和环保节能等方向发展。在传动方向有齿轮传动,蜗轮蜗杆,链条等不同的传动方式。国内外滑板车上常能看到以圆锥齿轮,轴传动,棘轮棘爪传动无链传动等多种方式设计的滑板车。在材料方面碳纤维,复合材料,镁铝合金,铝合金等因其优良的材料特性而被广泛的应用于该产品上。 四.机构方案评价 大学物理创新实验 Prepared on 22 November 2020 112622711海洋测绘专业赵宗力学 一.无摩擦平衡 计一轻木杆一端系细线使其悬在空中,另一端放置在泡沫上使其浮在水上,将泡沫移置于水面任意一点,观察系统最后平衡时的状态 实验原理: 轻木和泡沫的重力与细线的拉力和水的支持力三者抵消,使整个系统达到平衡状态。 1.若不改变实验的任何部分,只在轻木杆上增加小砝码但不至于木杆下沉,实验结果会如何同样达到平衡状态 2.如果将细绳换成轻弹簧,实验结果会如何同样达到平衡状态 二.球棒重心 实验原理: 球棒握把端较细长,在力矩的概念里,距支点越远力矩越大,故较细的一端可以和教重的一端保持平衡,是因为彼此的力矩为反方向的等值。 1.更改切割球棒的方式能否使两侧的重量都相等不会 三.依斯克里奇摆 实验装置:设计一个可以改变摆长角度的实验,调整摆的不同角度后,分别观察摆的周期是否产生改变。 实验原理: 本次实验使用的摆为复摆,在本实验中,复摆的周期与角度θ有关关. 1.当把摆的角度固定时加速度的不同能否使摆的周期不变不能 四.餐桌物理学---惯性实验 实验原理: 首先铅笔会落入红葡萄酒瓶内乃是因为惯性的关系。 惯性定律,也就是牛顿第一运动定律。说明物体若不受外力,或其所受外力之合力及合力矩为零时,则静者恒静,动者恒沿一直线作等(角)速度运动。此实验中,快速将名片弹开就是这个原理,同时也为了使铅笔受到较少的横向摩擦力。 1.如果把名片更换为餐巾纸或者是抹布,铅笔是否能落入酒瓶中为什么较难,摩擦力太大了 热学 五.光热转轮 封闭玻璃容器的中间支撑一可自由旋转的转轮,转轮由四片叶片组成,叶片的两面分别为黑色与白色。 1.当光源(传统灯,太阳光,手电筒皆可)照射到转轮,转轮会开始转 动。光源移开时,转轮停止转动。 2.使用雷射指示笔或LED灯泡的手电筒直接照射转轮的叶片时,转轮 不会转动。 3.用手电筒照射叶片白色那面时,转轮不会转。但照到黑色那面时转轮 就迅速转动起来。 实验原理: 一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。 第一届趣味物理知识竞赛 策 划 书 大学物理实验技能技巧大赛策划书 一、活动背景 物理是一门非常有趣又有用的自然学科,它研究的内容很广泛。千变万化的物理现象,像一个个的迷。当我们把握了必要的物理知识,揭开谜底的时候就会感悟到物理现象是十分有趣的,为推广物理知识,使同学们更好的熟悉物理,了解学习生活,以及科研方面的物理相关知识,体验物理的无穷乐趣,同时培养学生的自学能力和钻研精神,并让他们学习些课外科技知识,进行些课外科学实验,以激起他们学习物理的热情,培养他们发现并解决物理问题的能力,所以我们决定开展此次物理趣味知识大赛。通过这些趣味题目和动手操作,既能激发学生的学习热情,又能培养学生的动手操作能力。 二、活动目的 第一:保持我校大学生对自然界的好奇,发展对物理科学的探索的兴趣,在了解和认识自然的过程中有满意感及高兴感; 第二:利于我们自己的物理基础知识,养成良好的思维习惯,在解决问题或做决定时能尝试运用科学原理和科学研究方法; 第三:经历基本的科学探究过程,具有初步的科学探究能力,乐于参加和科学技术有关的社会活动,在实践中有依赖自己的科学素质提高工作效率的意识; 第四:具有创新意识,能独立思索,勇于有依据的怀疑,养成尊重现实,大胆想象的科学态度和科学精神; 第五:关心科学发张前沿,具有可持续发展的意识,树立准确的科学观,有将科学服务于人类的使命感和责任感。 三、活动主题: 从生活中感受物理,从物理中理解世界 四、活动名称:兰州理工大学第一届物理趣味知识大赛 五、主办单位: 主办单位:共青团兰州理工大学委员会 承办单位:兰州理工大学理学院分团委、学生分会 协办单位:大学生物理实验中心、科技部 七、比赛日期: 2011年11月 八、比赛地点: 1、初赛(笔试):北村考研自习室 2、复赛(实验操作竞赛):大学生物理实验室 慧鱼创意设计实验报告 篇一:慧鱼实验报告 华北电力大学 实验报告 实验名称: 慧鱼创意系统的实践与开发 课程名称:科技创新实践3 实验人:设制1301班施宗财 XX04410121 输电1402班张志聪 XX04400231 机电1401班侯文涛 XX044XX0 成绩:优秀 指导教师:房静 实验日期: 华北电力大学工程训练中心 | || | 隧道蔽障寻迹机器人 作品设计说明 一.研制背景及意义 我们知道,隧道、涵洞、高楼等工程建筑物发生事故时会发生坍塌,此时,救援人员是无法直接进入这些建筑物中进行营救工作的。同时,也没法得知里面的实际状况。为了解决这个问题,我们此次设计了这个隧道蔽障寻迹机器人,以期解决这个问题,以方便营救,代替人力进入这些复杂地段进行探测工作。 根据设计方案,我们先搭建了慧鱼模型,并进行了调试及简单的实地实验。 二、实验目的 1、认识了解慧鱼创意模型组合包中的各种功硬件。 2、了解ROBOPRO软件及编程。 3、了解慧鱼创意模型是如何控制与协调机构运动的。 4、锻炼机械创新能力,初步建立对机电一体化产品的认识。 三、实验原理 隧道机器人是一种代替人力进入到坍塌建筑物中的机器。能够进行蔽障、循迹,并且能够携带摄像头、红外探头、热敏、光敏、声敏电阻等的传感器进入复杂地段进行探测的机器。拥有很大的市场开发前景。 四、实验器材 1、“慧鱼”创意模型组合包。 2、“慧鱼”专用电源、数据线。 3、计算机一台。 4、“慧鱼”专用智能接口板。 5、ROBOPRO软件。 五、实验准备 认识“慧鱼”创意模型使用手册中已搭建的示例模型。 六、实验内容 1、根据慧鱼”创意模型使用手册,使用各种构件逐步搭建示例模型。 2、模型搭建好后连接相应电路。 3、在计算机上应用ROBOPRO软件编写相应程序,并通过数据线将程序下载到接口板中。 4、接通电源,调试程序。 5、验收成果并拆卸构件,放回原处。 七、实物成品图片展示 八、程序流程图 九、简单介绍功能 1、进入坍塌建筑物进行探测(可以加装摄像头以及探测头); 2、寻找并避开障碍物; 3、给定轨迹,能迎着所给轨迹进行运动(走出轨迹以后,灯亮,同时蜂鸣器发声) 十、实物示范(实际效果图) 篇二:慧鱼创新设计实验报告 实验五慧鱼创新设计实验报告 姓名:宋俊超班级: 13机自专升本1班成绩:实验日期: 12月18日教师签字: 一、实验目的 1、培养学生用创造性思维方法,设计、搭建新型的机 电子科技大学通信学院 最佳接收机(匹配滤波器) 实验报告 班级 学生 学号 教师任通菊 最佳接收机(匹配滤波器)实验 一、实验目的 1、运用MATLAB软件工具,仿真随机数字信号在经过高斯白噪声污染后最佳的恢复的方法。 2、熟悉匹配滤波器的工作原理。 3、研究相关解调的原理与过程。 4、理解高斯白噪声对系统的影响。 5、了解如何衡量接收机的性能及匹配滤波器参数设置方法。 二、实验原理 对于二进制数字信号,根据它们的时域表达式及波形可以直接得到相应的解调方法。在加性白高斯噪声的干扰下,这些解调方法是否是最佳的,这是我们要讨论的问题。 数字传输系统的传输对象是二进制信息。分析数字信号的接收过程可知,在接收端对波形的检测并不重要,重要的是在背景噪声下正确的判断所携带的信息是哪一种。因此,最有利于作出正确判断的接收一定是最佳接收。 从最佳接收的意义上来说,一个数字通信系统的接收设备可以看作一个判决装置,该装置由一个线性滤波器和一个判决电路构成,如图1所示。线性滤波器对接收信号进行相应的处理,输出某个物理量提供给判决电路,以便判决电路对接收信号中所包含的发送信息作出尽可能正确的判决,或者说作出错误尽可能小的判决。 图1 简化的接收设备 假设有这样一种滤波器,当不为零的信号通过它时,滤波器的输出能在某瞬间形成信号的峰值,而同时噪声受到抑制,也就是能在某瞬间得到最大的峰值信号功率与平均噪声功率之比。在相应的时刻去判决这种滤波器的输出,一定能得到最小的差错率。 匹配滤波器是一种在最大化信号的同时使噪声的影响最小的线性滤波器设计技术。注意:该滤波器并不保持输入信号波形,其目的在于使输入信号波形失 t输出信号值相对于均方根(输出)噪声值达到真并滤除噪声,使得在采样时刻 最大。 附件2: 理工科大学物理实验课程教学基本要求 物理学是研究物质的基本结构、基本运动形式、相互作用及其转化规律的自然科学。它的基本理论渗透在自然科学的各个领域,应用于生产技术的许多部门,是其他自然科学和工程技术的基础。 在人类追求真理、探索未知世界的过程中,物理学展现了一系列科学的世界观和方法论,深刻影响着人类对物质世界的基本认识、人类的思维方式和社会生活,是人类文明的基石,在人才的科学素质培养中具有重要的地位。 物理学本质上是一门实验科学。物理实验是科学实验的先驱,体现了大多数科学实验的共性,在实验思想、实验方法以及实验手段等方面是各学科科学实验的基础。 一.课程的地位、作用和任务 物理实验课是高等理工科院校对学生进行科学实验基本训练的必修基础课程,是本科生接受系统实验方法和实验技能训练的开端。 物理实验课覆盖面广,具有丰富的实验思想、方法、手段,同时能提供综合性很强的基本实验技能训练,是培养学生科学实验能力、提高科学素质的重要基础。它在培养学生严谨的治学态度、活跃的创新意识、理论联系实际和适应科技发展的综合应用能力等方面具有其他实践类课程不可替代的作用。 本课程的具体任务是: 1.培养学生的基本科学实验技能,提高学生的科学实验基本素质,使学生初步掌握实验科学的思想和方法。培养学 生的科学思维和创新意识,使学生掌握实验研究的基本方法,提高学生的分析能力和创新能力。 2.提高学生的科学素养,培养学生理论联系实际和实事求是的科学作风,认真严谨的科学态度,积极主动的探索精 神,遵守纪律,团结协作,爱护公共财产的优良品德。 二、教学内容基本要求 大学物理实验应包括普通物理实验(力学、热学、电磁学、光学实验)和近代物理实验,具体的教学内容基本要求如下: 1.掌握测量误差的基本知识,具有正确处理实验数据的基本能力。 (1)测量误差与不确定度的基本概念,能逐步学会用不确定度对直接测量和间接测量的结果进行评估。 (2)处理实验数据的一些常用方法,包括列表法、作图法和最小二乘法等。随着计算机及其应用技术的普及,应包括用计算机通用软件处理实验数据的基本方法。 2.掌握基本物理量的测量方法。 例如:长度、质量、时间、热量、温度、湿度、压强、压力、电流、电压、电阻、磁感应强度、光强度、折射率、电子电荷、普朗克常量、里德堡常量等常用物理量及物性参数的测量,注意加强数字化测量技术和计算技术在物理实验教学中的应用。 3.了解常用的物理实验方法,并逐步学会使用。 例如:比较法、转换法、放大法、模拟法、补偿法、平衡法和干涉、衍射法,以及在近代科学研究和工程技术中的广泛应用的其他方法。 4.掌握实验室常用仪器的性能,并能够正确使用。 例如:长度测量仪器、计时仪器、测温仪器、变阻器、电表、交/直流电桥、通用示波器、低频信号发生器、分光仪、光谱仪、常用电源和光源等常用仪器。 各校应根据条件,在物理实验课中逐步引进在当代科学研究与工程技术中广泛应用的现代物理技术,例如,激光技术、传感器技术、微弱信号检测技术、光电子技术、结构分析波谱技术等。 5.掌握常用的实验操作技术。 《机械创新设计》实验报告 班级机械1006班 姓名 学号 指导教师张融 日10 月5 年2013. 多功能助 力器实验题目: 绩成名姓孙翔 批阅教师实验日期 批阅日期同组成员 ****************************************************************************** 实验目的一、 1、发挥学生创造性培养学生的学习兴趣和综合素质;、将涉及内容和设计方法邮寄的融合到一起,使学生进一步掌握教2材核心内容,培养学生创造能力和工程设计能力; 、突破原有课程体系和内容的束缚,加强学科之间的交叉融合;3 4、培养学生善于观察生活以及结合创新科学技术服务于生活的理念。 所选课题的功能原理与工作原理分析;二、功能原理:多功能老人(残疾人)方便助力器,属于老人(残疾人)生活用建议坐便器结合起来的一款行动座椅、具。它是将老人方便助力器、多功能老年人(残疾人)用品,旨在协助老年人(残疾人)行动及上例如座板采用碳纤维,厕所,不仅如此,本项目还从材质上进行改革,整个产品易如拆装,并且满足产品设计轻量化原则;功能上透气舒适,方便在不用时将其拆卸,且便于更换损坏零件。工作原理: 行动不便的问通过支撑架的无力支撑作用解决老年人(残疾人)使得老年人行进题,将碳纤维材质做成坐板并使之安装在支撑架上,途中疲劳时可以坐下休息并且满座轻量化原则解决助力器笨重而不 便携带的问题;通过对坐板的改造,可以节省材料减轻产品重量,并且可以增加多功能助力器的另一功能——坐便器,通过提升坐便高度,帮助老年人解决起蹲不变的问题。本课题设计的创新点;三、、本课题将助力器、行动座椅、坐便器等功能综合一起;1 、产品结构简单易于拆装;2 3、产品材料新颖,牢固舒适; 4、产品设计采用轻量化原则;本课题设计的应用和发展前景;四、世纪下半叶,人类社会经历了人类历史上最为迅速的人口老20人口老龄化是世界人口发展的普遍趋势,龄化进程,尤其是发达国家。1%2005年全国是科学与经济不断发展进步的标志。而在我国,早在万人,占总岁以上人口达到10055人口抽样最新数据显示,我国651490160%人口数的。2006年统计数据表明,中国岁以上的人口是万人。占全国人口65岁以上的人口是10419,万人,占人口总数的%。可见在我国,老年群 电子科技大学 实验报告 ( 2018 - 2019 - 2 ) 学生姓名:学生学号:指导老师: 实验学时:1.5h 实验地点:基础实验大楼425 实验时间:2019.4.9 14:30—16:00 报告目录 一、实验课程名称:电路实验I 1.实验名称:BJT放大器设计与测试 二、实验目的: 1. 了解BJT管的基本放大特性。 2. 掌握BJT共射放大电路的分析与设计方法。 3. 掌握放大电路静态工作点的测试方法。 4. 掌握放大电路放大倍数(增益)的测试方法。 5. 掌握放大电路输入、输出电阻的测试方法。 6. 掌握放大电路幅频特性曲线的测试方法。 三、实验器材(设备、元器件): GDS1152A型数字示波器一台。 EE1641B1型函数发生器一台。 通用面包板一个。 1kΩ电阻;10mH电感;0.047μF电容若干。 四、实验原理: 3、测试方法 (1)静态工作点调整与测试 对直流电压的测量一般用数字万用表。测量静态工作点时测出晶体管各管脚对地的电压。 (2)放大倍数的测试 用晶体管毫伏表或者示波器直接测量输出、输入电压,由 Av=vo/vi 即可得到。(3)放大器输入电阻的测试 在放大器输入端口串入一个取样电阻R,用两次电压法测量放大器的输入电阻Ri。 (4)放大器输出电阻的测试 在放大器输出端口选择一个合适的负载电阻RL,用两次电压法分别测量空载与接上负载时的输出电压,计算输出电阻Ro。 (5)放大器频率特性的测试 用点频法测试法测量放大器的频率特性,并求出带宽。 五、实验内容: (1)静态工作点的测试 (2)电压增益测试 (3)输入电阻测试 (4)输出电阻测试 (5)幅频特性测试 六、实验数据及结果分析: 1、静态工作点调整与测试 令VCC=+12V,用万用表测量VE、VB、VC,计算VBE、IEQ、VCE,数据记入表格中。 2、放大倍数的测试 用函数发生器输出一个正弦波信号作为放大器的输入信号,设置信号频率 f =1kHz,(有效值)Ui=5mV,测量U0 ,计算放大器的电压放大倍数(增益)Av。数据填入表中,定量描绘输出波形图。 第五届全国大学生机械创新设计大赛 慧鱼组 设计说明书 作品名称:多功能全自动储物柜 参赛人员:谢友春唐琳杨猛洪海闫亚娟 指导教师:覃莉杜超 所属单位:西南石油大学 2012年 3 月 目录 1、设计背景 (2) 2、创新点分析 (3) 3、设计方案 (4) 3.1 外形设计 (4) 3.2 升降构件设计 (5) 3.3 伸缩取放构件设计 (5) 3.4 副柜设计 (6) 3.5 书桌设计 (7) 4、工作过程分析 (7) 5、控制程序 (9) 6、实用可行性及成本分析 (9) 7、作品应用前景 (10) 参考文献................................................................................. 错误!未定义书签。 1、设计背景 近年来,随着我国房地产市场持续升温,房价也一涨再涨,小户型住房成了市场的宠儿。由于小户型房间面 积小,对各种家具的设计既是机遇又 是挑战,同时对储物柜的要求也有了 新的要求。因此对于居民来说,如何 利用有限的空间发挥最大的效益是 一个摆在每个家庭面前的难题。而对于家具制造商来说这却是一个极好的商机,谁能解决好这个空间利用的问题,谁就拿到了进入未来家具市场的门票。 传统的成品家用储物柜(图1)约有2.5米左 右,储物柜顶部距离屋顶还有一定的距离,但由于 这部分空间由于取放东西的不便且存有安全隐患, 因此绝大多数家庭不得不放弃使用这部分空间。当 今的小户型住房本来面积就不大,如果利用传统的 储物柜就不能充分地利用本来就小的空间,这无疑 是雪上加霜。 因此需要充分考虑传统储物柜到天花板之 间的这部分闲置空间,将这一部空间分利用上, 那么平时要占据很多空间而又不经常用的物什 就可以放置在这些空间里。目前常用的方法就是 根据房间的大小高低定制储物柜(图2,图3),但是定制的柜子成本较高,不能移动改变摆放位置,无法重复利用。 图1传统储物柜 图2传统储物柜 图3传统储物柜 大学物理创新实验报告 篇一:大学物理创新实验报告 大学物理实验报告总结 一:物理实验对于物理的意义 物理学是研究物质的基本结构,基本的运动形式,相互作用及其转化规律的一门科学。它 的基本理论渗透在基本自然科学的各个领域,应用于生产部门的诸多领域,是自然科学与 工程科学的基础。物理学在本质上是一门实验学科,物理规律的发现和物理理论的建立都 必须以物理实验为基础,物理学中的每一项突破都与实验密切相关。物理概念的确立,物 理规律的发现,物理理论的确立都有赖于物理实验。 二:物理实验对于学生的意义 大学物理实验已经进行了两个学期,在这两个学期,通过二十几个物理实验,我们对物理 学的理解和认识又更上了一步台阶。通过对物理实验的熟悉,可以帮助我们掌握基本的物 理实验思路和实验器材的操作,进一步稳固了对相关的定理的理解,锻炼理性思维的能力。在提高我们学习物理物理兴趣的同时,培养我们的科学思维和创新意识,掌握实验研究的 基本方法,提高基本科学实验能力。它也是我们进入大学接触的第一门实践性教学环节, 是我们进行系统的科学实验方法和技能训练的重要必修课。它还能培养我们“实事求是的 科学态度、良好的实验习惯、严谨踏实的工作作风、主动研究的创新与探索精神、爱护公 物的优良品德”。 三:我眼中的物理实验的缺陷 1:实验目的与性质的单一性 21世纪的学科体系中,多种学科是相互结合,相互影响的,没有一门学科能独立于其他 学科而单独生存,但是在我们的实验过程中,全都是关于物理,这一单科的实验内容,很 少牵涉到其他。有些实验完全是为了实验而实验,根本不追求与其他学科的联系与结合。2:实验的不及时性及实验信息的不对称性 物理是一门以实验为基础的基本学科,在我们所学的物理内容中,更多的是关于公式定理的,这些需要及时的理解和记忆,最简单的方式是通过实验来进行。但是我们所做的实验,都是学过很久以后,甚至是已经学完物理学科后进行的,这就造成我们对物理知识理解的 不及时性,不能达到既定的效果。而且,我们重复科学实验伟人的实验很大程度上是得知结论后凭借少量的实验数据轻易得出相似的结论,与前人广袤的数据量不可同日而语,这就造成实验信息的不对称性, 不利于从本质上提高我们的实验能力。机器人创新设计实验报告
电子科技大学 汇编 实验报告
大学物理创新实验论文
物理创新设计实验报告 大学物理
最新西华大学机器人创新设计实验报告(工业机械手模拟仿真)
机械工程综合训练与创新设计实验报告
电子科大电子技术实验报告
大学物理实验报告优秀模板
机器人实验报告
机械创新设计结课报告
大学物理创新实验
机器人实验报告
物理实验方案创新与设计大赛
慧鱼创意设计实验报告doc
电子科技大学通信原理实验实验报告2
理工科大学物理实验课程教学基本要求
机械创新设计实验报告
电子科技大学实验报告撰写模板
第五届全国大学生机械创新设计大赛(慧鱼组)实验报告
大学物理创新实验报告