螺旋桨-课程设计
山东104总吨钢质拖网渔船
1.已知船体主要参数
船型:单桨,转动导流管平衡舵,尾机型钢质拖网渔船。设计水线长:L wl=27.50m
垂线间长:L pp=26.00m
型宽:B=5.40m
型深:D=2.50m
平均吃水:T m=1.90m
尾吃水: T a=2.40m
方形系数:C b=0.502
棱形系数:C p=0.592
宽吃水比:B/T m=2.84
排水量:Δ=137.35t
浮心纵向坐标(LCB):X b=-0.78m
桨轴中心距基线:Z s=0.35m
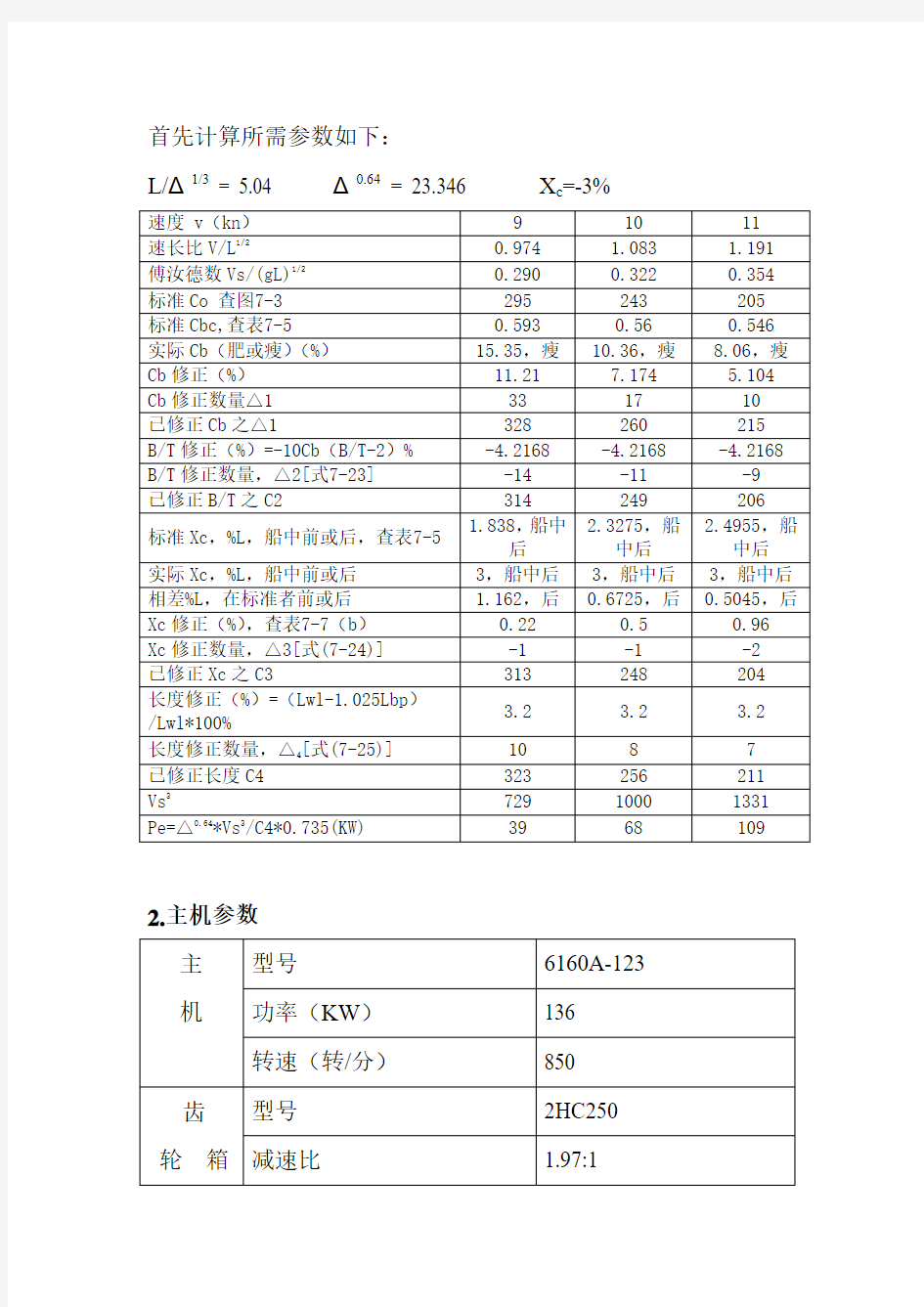
用艾亚法估算船体有效功率数据表:
首先计算所需参数如下:
L/Δ1/3 = 5.04 Δ0.64 = 23.346 X c=-3%
速度 v(kn)9 10 11
速长比V/L1/20.974 1.083 1.191 傅汝德数Vs/(gL)1/20.290 0.322 0.354 标准Co 查图7-3 295 243 205 标准Cbc,查表7-5 0.593 0.56 0.546 实际Cb(肥或瘦)(%)15.35,瘦10.36,瘦8.06,瘦Cb修正(%)11.21 7.174 5.104 Cb修正数量△133 17 10
已修正Cb之△1328 260 215 B/T修正(%)=-10Cb(B/T-2)% -4.2168 -4.2168 -4.2168 B/T修正数量,△2[式7-23] -14 -11 -9
已修正B/T之C2 314 249 206
标准Xc,%L,船中前或后,查表7-5 1.838,船中
后
2.3275,船
中后
2.4955,船
中后
实际Xc,%L,船中前或后3,船中后3,船中后3,船中后相差%L,在标准者前或后 1.162,后0.6725,后0.5045,后Xc修正(%),查表7-7(b)0.22 0.5 0.96 Xc修正数量,△3[式(7-24)] -1 -1 -2
已修正Xc之C3 313 248 204
长度修正(%)=(Lwl-1.025Lbp)
/Lwl*100%
3.2 3.2 3.2
长度修正数量,△
4
[式(7-25)] 10 8 7
已修正长度C4 323 256 211 Vs3729 1000 1331 Pe=△0.64*Vs3/C4*0.735(KW) 39 68 109
2.主机参数
主机型号6160A-123 功率(KW)136
转速(转/分)850
齿轮箱型号2HC250 减速比 1.97:1
3.推进因子的确定
(1)伴流分数ω
本船为单桨钢质拖网渔船,故使用汉克歇尔公式估算:
ω=0.77*Cp-0.28=0.77*0.592-0.28=0.176
(2)推力减额分数t
对于单螺旋桨渔船,也使用汉克歇尔公式估算:
t=0.77*C P-0.30=0.77*0.592-0.30=0.156
(3)相对旋转效率
缺少资料,故近似地取为ηR =1.0
(4)船身效率
ηH =(1-t)/(1-ω)=(1-0.156)/(1-0.176)=1.0243
4.桨叶数Z的选取
根据一般情况,单桨船多用四叶,加之教材中四叶图谱资料较为详尽、方便查找,故选用四叶。
5.A E/A0的估算
按公式A E/A0 = (1.3+0.3*Z)*T / (P0-P v)D允许2 + k进行估算:其中:在设计航速时,P E=71.5KW,V=10.1kn
T=P E/(1-t)V=71.5/((1-0.156)*10.1*0.5144)=16.306kN
水温15℃时汽化压力
P v=174 kgf/m2=174*9.8 N/m2=1.705 kN/m2
静压力为:
P0=P a+γh s=(10330+1025*(2.4-0.35))*9.8 N/m2
=121.826 kN/m2
k取0.2
由型线图量得:D允许=1.5m
A E/A0 = (1.3+0.3*Z)*T / (P0-P v)D允许2 + k
=(1.3+0.3*4)*16.306/((121.826-1.705)*1.52)+0.2
=0.351
6.桨型的选取说明
目前在商船螺旋桨设计中,以荷兰的楚思德B型螺旋桨和日本AU型(当然包括其改进型,以MAU表示之)螺旋桨应用最为广泛。另外鉴于课本上只有AU型图谱资料,为方便螺旋桨制图选用MAU螺旋桨。
7.根据估算的A E/A0选取2~3张图谱,计算可以达到最大航速根据A E/A0=0.4003选取MAU4-40,MAU4-55,MAU4-70三张图谱。
功率储备取10%,轴系效率ηS=0.98,齿轮箱效率ηG=0.96
则螺旋桨敞水收到功率
P DO=P S*0.9*ηS*ηG*ηR=136*0.9*0.98*0.96*1.0
=115.154kW=156.67 hp
8.列表按所选图谱进行终结设计,得到3组螺旋桨的要素及最大航速V SMAX
其中,螺旋桨转速为:N=n/i=850/1.97=431.47r/min
根据MAU4-40,MAU4-55,MAU4-70的
B-δ图谱列表计算。
P
项目单位数值
假定航速V kn 9.000 10.000 11.000 V
A
=(1-ω)*V kn 7.416 8.240 9.064
B p =N*P
D
0.5/V
A
2.536.059 27.709 21.835
B
p
1/2 6.005 5.264 4.673
MAU4-40 δ70.000 63.000 57.000 P/D 0.680 0.710 0.750 ηO0.580 0.615 0.643 P
TE
=P
DOηH
ηO hp 93.077 98.693 103.187
MAU4-55 δ68.500 61.000 55.000 P/D 0.720 0.760 0.810 ηO0.565 0.595 0.630 P
TE
=P
DOηH
ηO hp 90.670 95.484 101.101
MAU4-70 δ67.000 60.400 54.500 P/D 0.730 0.770 0.830 ηO0.545 0.575 0.595 P
TE
=P
DOηH
ηO hp 87.460 92.274 95.484
根据表中的计算结果可绘制P TE,δ,P/D及η0对V的曲线,如下图所示:
结论:从P TE-f(V)曲线与船体有效马力曲线之交点,可获得不同盘面比所对应的设计航速及螺旋桨最佳要素P/D、D及η0如下表所列。
/kn P/D δD/m η0 MAU V
max
4-40 10.1450 0.7152 62.0744 1.4595 0.6192 4-55 10.0720 0.7633 60.5252 1.4129 0.5975 4-70 9.9942 0.7697 60.4363 1.3999 0.5750
用图形反映上述数据的变化趋势:
说明:由于空泡校核结果,所需盘面比小于0.40,故图中没有画要求的盘面比曲线(校核过程如下)。
9.空泡校核,由图解法求出不产生空泡的(A E/A0)MIN及相应的V sMAX、P/D、η0、D
按柏利尔空泡限界线中适用于拖船,拖网渔船的下限曲线,计算不发生空泡之最小展开面积比。
桨轴沉深h s由船体型线图取h s =2.4-0.35=2.05m
p0-p v=p a+γh s-p v=(10330+1025*2.05-174)kgf/m2
=12431.25kgf/m2
计算温度t=15℃, p v=174kgf/m2,
P DO=P S*0.9*ηS*ηG*ηR=136*0.9*0.98*0.96*1.0 =115.154kW=156.67 hp
空泡校核计算表如下:
序号项目单位
数值
MAU4-40 MAU4-55 MAU4-70
1 V
max
kn 10.145 10.072 9.994
2 V
A =0.5144*V
max
(1-ω) m/s 4.300 4.269 4.236
3 (0.7*π*N*D/60)2(m/s)2532.185 498.743 489.608
4 V
0.7R 2=V
A
2+(3)2(m/s)2550.676 516.969 507.553
5 ζ=(p
0-p
v
)/0.5*ρ*V
0.7R
20.426 0.453 0.462
6 η
c
(查图6-20) 0.135 0.140 0.142
7 T=P
D
*η0*75/V A kgf 1691.990 1644.527 1594.919
8 A
p =T/0.5*ρ*V
0.7R
2*η
c
m20.435 0.434 0.423
9 A
E =A
p
/(1.067-0.229P/D) m20.482 0.487 0.475
10 A
E /A
=A
E
/(0.25*π*D*D) 0.288 0.311 0.309
对上述计算结果进行分析可知,由于该船尾吃水较大,导致螺旋桨浸深足够大,不发生空泡所需盘面比较小,故直接选择MAU4-40螺旋桨。
由此可求得不发生空泡的最小盘面比以及所对应的最佳螺旋桨要素:
A E/A0=0.40,P/D=0.7152,D=1.4595m,
η0=0.6192,V MAX=10.145kn。
10.计算与绘制螺旋桨无因次敞水性征曲线
由MAU4-40的敞水性征曲线插值求得所需敞水性征曲线相关数据,列表如下:
J 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 K
0.301 0.269 0.242 0.212 0.175 0.138 0.1 0.055 0.008
T
0.319 0.292 0.272 0.246 0.217 0.185 0.143 0.102 0.055 10K
Q
η00 0.151 0.285 0.417 0.525 0.617 0.676 0.633 0.267
由上述表格数据画出设计桨的敞水性征曲线:
11.计算船舶系泊状态时螺旋桨有效推力与保持转矩不变的转速N0
由敞水性征曲线得J=0时,K T=0.301,K Q=0.0319。
计算功率P D=136*0.98*0.96=127.95kW=174.08hp
系柱推力减额分数取t0=0.04,
主机转矩
Q=P D *60*75/(2πN)=174.08*60*75/(2*3.1416*431.47) = 289.1kgf*m 系柱推力
T=(K T /K Q )*(Q/D)=(0.301/0.0319)*(289.1/1.4595) = 1869.06kgf 螺旋桨转速 N 0=60*
)K *D *T /(T 4ρ=60*(1869.06/(104.63*1.4595
4
*0.301))0.5
= 217.02 rpm
12.桨叶强度校核
按我国2001年《钢质海船入级与建造规范》校核t 0.25R 及t 0.6R ,
应不小于按下式计算所的之值:
X
K Y
t -=
(mm )
式中:K 为材料系数; Y=1.36*A 1*N e /(Z*b*N); X=A 2*G*A d *N 2*D 3/(1010*Z*b); A 1=D/P(K 1-K 2*D/P 0.7)+K 3*D/P 0.7-K 4 ;
A 2
=(D/P)*(K 5+K 6*ε)+K 7*ε+K 8;
计算功率N e =136*0.98*0.96=127.95kW=174.08hp
A d = A E /A 0=0.40,P/D=0.7152,ε=10o,G=8.3g/cm 3
,N=431.47rpm 在0.66R 处切面弦长
b 0.66R =0.226* A E /A 0*D/(0.1*Z)=0.226*0.4*1.4595/0.4=0.3298m
b0.25R=0.7212*b0.66R=0.7212*0.3298=0.2379m
b0.6R=0.9911*b0.66R=0.9911*0.3298=0.3269m 强度校核计算表如下:
项目单位
数值
0.25R 0.6R
弦长b m 0.2379 0.3269 K
1
634 207
K
2
250 151
K
3
1410 635
K
4
4 34
A 1=D/P(K
1
-K
2
*D/P
0.7
)+K
3
*D/P
0.7
-K
4
2365.1938 848.0893
Y=1.36*A
1*N
e
/(Z*b*N) 1002.3996 261.5744
K
5
82 23
K
6
34 12
K
7
41 65
K
8
380 330
A 2=(D/P)*(K
5
+K
6
*ε)+K
7
*ε+K
8
1380.0447 1179.9441
材料系数K(C
u1
锰青铜) 1.0000 1.0000
X=A
2*G*A
d
*N2*D3/1010*Z*b 0.2787 0.1734
t=[Y/(K-X)]0.5mm 37.2781 17.7889 MAU标准桨叶厚度t' mm 55.8259 31.8171 校核结果满足要求满足要求实取桨叶厚度mm 55.8259 31.8171
13.桨叶轮廓及各半径切面的型值计算
a.叶片最大宽度在0.66R处,其值为:
b0.66R=0.226* A E/A0*D/(0.1*Z)
=0.226*0.4*1.4595/0.4=0.3298m
b.叶片最大厚度在螺旋桨轴线处,其值为:
t max=0.05*D=0.05*1.4595*1000=72.975mm
其它桨叶尺寸见如下表格:(单位:m)
叶片最大宽度0.33 螺旋桨直径 1.46
r/R 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 0.95 母线至
叶片随
0.09 0.11 0.13 0.14 0.16 0.17 0.17 0.16 0.14 边的距
离
母线至
叶片导
0.13 0.15 0.16 0.17 0.17 0.16 0.13 0.08 0.04 边的距
离
叶片宽
0.22 0.26 0.29 0.31 0.33 0.33 0.31 0.24 0.18 度
叶片厚
0.06 0.05 0.05 0.04 0.03 0.02 0.02 0.01 0.01 度
导边至
0.07 0.08 0.09 0.10 0.11 0.13 0.14 0.12 0.09 最厚点
的距离
14.桨毂设计
最大连续功率P D=174.08hp,此时N0=217.02 rpm
则:(P D/N)1/3= (174.08/217.02) 1/3= 0.929
根据中文课本P157图8-40可查得螺旋桨桨轴直径:
d t=145mm
采用整体式螺旋桨,则螺旋桨的毂径:
d h=1.8d t=1.8*145=261mm
而按AU型螺旋桨毂径比为0.18计算所需桨毂直径为:
d h=0.18*1.4595*1000=262.7mm
说明:实际生产过程中,为方便加工,尺寸都应该取为整数,在此设计时没有完全参照课本上给的公式计算。
毂前后两端的直径:
d2=0.88*dh=0.88*262.7=232mm
d1=1.10*dh=1.10*262.7=289mm
根据实际情况取桨毂长度:l0=320mm
其中,前半段长120mm,后半段长200mm
减轻孔的长度:l1=0.3*l0=0.3*320=96mm
毂部筒圆厚度:δ=0.75*t0.2R=0.75*0.0406*1459.5=44.44mm 叶面、叶背与毂连接处的圆弧半径:
r1=0.033D=0.033*1.4595*1000=48.16mm
r2=0.044D=0.044*1.4595*1000=62.22mm
15.螺旋桨总图绘制:伸张轮廓、切面形状、投射轮廓、展开轮
廓、侧投影轮廓、限界轮廓、最大厚度线、包毂线、桨毂、标题栏、主要要素、型值表、尺寸标注、技术要求(见总图)
16.螺旋桨重量及转动惯性计算
C u1锰青铜材料重量密度γ=8300kgf/m3;
0.6R处叶切面的弦长为:
b0.6R=0.9911*b0.66R=0.9911*0.3298=0.3269m
螺旋桨直径D=1.4595m。
t0.2=0.0406*1.4595=0.0593 m, t0.6= 0.0218*1.4595=0.0318m; 最大连续功率P D=174.08hp,此时N0=217.02 rpm
毂径d h=0.18*D=0.18*1.4595*1000=262.7mm
毂长L K=0.32m
桨毂长度中央处轴径
d0=0.045+0.108(P D/N)1/3-KL K/2
=0.045+0.108*(174.08/217.02)1/3-0.32/(2*15)
=0.135m
毂径比d/D=0.18
则根据我国船舶及海洋工程设计研究院提出的公式:
桨叶重
G bl=0.169*γ*Z*b max*(0.5*t0.2+t0.6)*(1-d/D)*D
=0.169*8300*4*0.3269*(0.5*0.0593+0.0318)*(1-0.18)*1.4595 =134.89kgf
桨毂重
Gn=(0.88-0.6d0/d)*L K*γ*d2(kgf)
=(0.88-0.6*0.135/0.2627)*0.32*8300*0.26272
=104.78kgf
螺旋桨重量G= G bl +Gn=134.89+104.78=239.67kgf
螺旋桨惯性矩
I mp=0.0948*γ*Z*b max*(0.5t0.2+t0.6)D3
=0.0948*8300*4*0.3269*(0.5*0.0593+0.0318)*1.45953
=196.56kgf·c m·s2
17.设计总结及体会
这次课程设计从开始到现在已有一段时间了,通过自己的努
力最终如愿完成了所有的工作。现对此做一个总结:
做课程设计第一步就是选好船型资料。由于学校关于船型的
图谱集很少,大家选的船型都差不多。我选了一条渔船,但让我
没预料到的是我所选的船型在用艾亚法计算船舶有效马力曲线
时出现了问题,由于渔船本身不大,但其设计航速较大,傅汝德
数理所当然的很大,在用插值法计算时只能外插,导致结果出现
较大偏差,最后算出的设计航速对应的功率已经超过了主机功
率。在确认计算无误后由于不能计算下去,只能换船。
选好船型后,后面的就是照着图谱设计步骤一步一步做。如根据δ-
B图谱进行螺旋桨终结设计,空泡校核确定最佳桨型参p
数,计算与绘制螺旋桨无因次敞水性征曲线,强度校核看是否满
足要求好以此为是否修正螺距比的依据,画螺旋桨总图等等。做
这几步时给自己最大的感触是要认真对待,仔细计算,另外就是
要特别注意老师提到的单位换算问题。自己在计算时由于运用
excel时出现了失误,导致结果出现了严重错误,好不容易才发
现错误的根源。当然在这个过程中也遇到了其它问题,在计算系
柱特性计算时,发现计算出来的螺旋桨转速和设计转速有较大差
距,一时找不到原因所以不敢继续往下做,最后还是问了老师才
得以继续,在此也特别感谢老师的帮助。此时此刻再回想这个过
程,是五味俱全,有过挑灯夜战,有过深思熟虑,有过焦虑也有
过激动。但有了毅力,同时也相信自己的能力,坚持下去成功也离自己不远了。
课程设计是把学习到的理论知识运用到实际当中,这对我们在校大学生是一个很好的锻炼机会,通过这个过程,对理论知识的理解应该说上了一个台阶,更重要是知道实际生产设计是一个怎样的过程,这对我们即将进入社会工作无疑是百利而无一害。
电工基础知识大全
电工基础知识大全 电工基础知识大全电工识图口诀巧记忆 一,通用部分 1,什麽叫电路? 电流所经过的路径叫电路。电路的组成一般由电源,负载和连接部分(导线,开关,熔断器)等组成。 2,什麽叫电源? 电源是一种将非电能转换成电能的装置。 3,什麽叫负载? 负载是取用电能的装置,也就是用电设备。 连接部分是用来连接电源与负载,构成电流通路的中间环节,是用来输送,分配和控制电能的。 4,电流的基本概念是什麽? 电荷有规则的定向流动,就形成电流,习惯上规定正电荷移动的方向为电流的实际方向。电流方向不变的电路称为直流电路。 单位时间内通过导体任一横截面的电量叫电流(强度),用符号I 表示。 电流(强度)的单位是安培(A),大电流单位常用千安(KA)表示,小电流单位常用毫安(mA),微安(μA)表示。 1KA=1000A 1A=1000 mA 1 mA=1000μA
5,电压的基本性质? 1)两点间的电压具有惟一确定的数值。 2)两点间的电压只与这两点的位置有关,与电荷移动的路径无关。 3)电压有正,负之分,它与标志的参考电压方向有关。 4)沿电路中任一闭合回路行走一圈,各段电压的和恒为零。 电压的单位是伏特(V),根据不同的需要,也用千伏(KV),毫伏(mV)和微伏(μV)为单位。 1KV=1000V 1V=1000 mV 1mV=1000μV 6,电阻的概念是什麽? 导体对电流起阻碍作用的能力称为电阻,用符号R表示,当电压为1伏,电流为1安时,导体的电阻即为1欧姆(Ω),常用的单位千欧(KΩ),兆欧(MΩ)。 1MΩ=1000KΩ 1KΩ=1000Ω 7,什麽是部分电路的欧姆定律? 流过电路的电流与电路两端的电压成正比,而与该电路的电阻成反比,这个关系叫做欧姆定律。用公式表示为:I=U/R 式中:I——电流(A);U——电压(V);R——电阻(Ω)。 部分电路的欧姆定律反映了部分电路中电压,电流和电阻的相互关系,它是分析和计算部分电路的主要依据。 8,什麽是全电路的欧姆定律?
基于UG二次开发的船用螺旋桨参数化建模方法与实现
SHIP ENGINEERING 船舶工程 V ol.32 No.4 2010 总第32卷,2010年第4期基于UG二次开发的船用螺旋桨参数化 建模方法与实现 唐英1,王志坚1,杨凯2 (1.北京科技大学机械工程学院,北京 100083;2.中国电子科技集团公司第45研究所,三河 065201) 摘 要:船用螺旋桨的建模方法是将二维初始型值点导入通用CAD软件,通过多步操作得出三维空间数据,完成整个造型过程.这种方法不但操作繁琐,而且效率低.在研究了船用螺旋桨参数化建模方法的基础上,采用对UG进行二次开发的方法,编制出船用螺旋桨参数化建模的功能模块.通过给定船用螺旋桨的主要几何参数,计算出初始型值点,进行坐标变换,将其从平面坐标系还原到空间真实位置.另外给出桨叶叶梢缺失部分数据的NURBS拟合补充方法,并在进行光顺处理后,最终生成船用螺旋桨的三维模型. 关键词:船用螺旋桨;UG二次开发;自由曲面;参数化建模 中图分类号:U664.33 文献标志码:A 文章编号:1000-6982 (2010) 04-0052-04 Parametrical Modeling Method and Implementation of Marine Propeller Based on UG Software TANG Ying1, W ANG Zhi-jian1, Y ANG Kai2 (1.School of Mechanical Engineering, Beijing Science and Technology University, Beijing 100083, China; 2.The 45th Research Institute of China Electronics Technology Group Corporation, Sanhe 065201, China) Abstract:Marine propeller is a type of part with free-form surface. Traditional modeling method of marine propeller needs to export the origin data into CAD software, converting the origin 2D point data to the 3D point data after several steps and then complete the modeling process. This method is time-consuming and inefficiency. With parametrical modeling technology, functional package for marine propeller modeling based on UG software is developed and introduced in the paper. In the developed package, some key structural parameters of marine propeller are inputted firstly and then the 2D point data and the 3D surface data are calculated automatically. To build the 3D model of the propeller part, firstly the coordinate transformation operation from a 2D coordinate system to a 3D reference system is needed to recover the points in its 2D drawing to their true position in 3D model. And then, point data at the tip of propeller are added with NURBS fitting method. After smoothing calculation of the surface, the 3D model of the marine propeller is completed. Key words: marine propeller; UG Software; free-form surface; parametrical modeling 0 引言 船用螺旋桨是典型的自由曲面类零件,一般由桨叶和桨毂两部分构成.桨毂外形通常较为简单,是近似的圆锥体或圆柱体,而桨叶形状非常复杂.除极少数情况外,桨叶形状无法用简单数学公式进行描述,而是用许多离散点的坐标值来表示,这种用来表示形状的离散点称为型值点.每个桨叶叶片的型值点通常多达数百个,有时甚至更多.从二维图纸的型值点到最终三维模型的建立,其间需经过偏移、旋转、生成曲线、生成曲面等多步操作.大量数值的计算处理工作和繁冗复杂的操作过程使船用螺旋桨建模过程不仅费时费力,且容易出现差错.鉴于目前针对船用螺旋桨设计建 收稿日期:2009-10-27;修回日期:2010-01-20 作者简介:唐英(1967-),女,副教授,博士后,主要从事机械制造与自动化方面的科研与教学工作.
螺旋桨知识
空气螺旋桨把发动机旋转作功形式转变为直线作功形式;把发动机的功率转变为拉动飞机前进的有效功率。它的工作效率及与发动机有配合程度,直接影响模型飞机的性能。在航模竞技比赛中,出于追求动力组极限水平的需要,对螺旋桨的要求更为“苛刻”;因此以“量体裁衣”手工方式制作螺旋桨的好处显而易见。航模初学者能够扎实地掌握这一手艺很有必要。 本文以一个直径(D)200mm、几何桨距(H)120mm的两叶等距螺旋桨(适用于装有1.5cc 压燃式发动机或2.5cc电热式发动机的特技模型飞机)为例,介绍削制螺旋桨的方法。一、螺旋桨的一些基础概念 当我们把螺旋桨看成是一个一面旋转一面前进的机翼时,就能借助已知的空气动力学常识,直观地理解螺旋桨的基本工作原理。 1.桨距、动力桨距和几何桨距 桨距:从广义而言,可以理解为螺旋桨旋转一周沿桨轴方向所通过的直线距离。习惯上螺旋桨70%半径处的桨距值为“称呼值”,它具有标示意义。 动力桨距(Hg):桨叶旋转一周模型飞机所通过的距离(见图1)。设计螺旋桨时首先要确定动力桨距值。 几何桨距:(H):桨叶弦线迎角为零时,螺旋桨旋转一周所前进的距离(也见图1)。它体现了桨叶角的实际大小,是“看得见、摸得着”的实际参数。航模图纸上一般都标出几何桨距,是消制螺旋桨的主要依据。 2.动力桨距和几何桨距的关系 由于螺旋桨工作在接近于有利迎角下,与零度迎角之间的角差的存在,因此动力桨距值必然小于几何桨距值。几何桨距和动力桨距的关系是:几何桨距(H)= 1.1 ~ 1.3倍动力桨距(Hg)。也就是说,设计模型飞机时,动力桨距确定后,可以通过上述公式概略估算出螺旋桨的几何桨距。 3.通常使用的螺旋桨是各段几何桨距值相等的所谓等距桨。它的优点是设计、制作比较容易;缺点是工作效率劣于不等距桨。由于不等距桨各段的几何桨距值和桨角均不一样,尽管其效率高,但制作的难度大。故初学者从削等距桨起步较为稳妥。 4.桨叶角(β):桨叶角是指桨叶剖面弦线与旋转平面之间的夹角。 5.几何桨距和桨叶角的关系 几何桨距和桨叶角直接关联,是同一个问题的两种表达方式。几何桨距强调的是总体,桨叶角强调的是局部。就等距螺旋桨而言,桨叶角随其在螺旋桨半径方向上所处位置的不同而异;随着由桨根到桨尖方向的逐渐位移,桨叶角渐渐有规律地减小。(图2)
航模螺旋桨基础知识1
航模螺旋桨基础知识1 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
一、工作原理 二、可以把螺旋桨看成是一个一面旋转一面前进的机翼进行讨论。流经桨叶 各剖面的气流由沿旋转轴方向的前进速度和旋转产生的切线速度合成。在螺旋桨半径r1和r2(r1<r2)两处各取极小一段,讨论桨叶上的气流情况。 V—轴向速度;n—螺旋桨转速;φ—气流角,即气流与螺旋桨旋转平面夹角;α—桨叶剖面迎角;β—桨叶角,即桨叶剖面弦线与旋转平面夹角。显而易见β=α+φ。 三、空气流过桨叶各小段时产生气动力,阻力ΔD和升力ΔL,见图1—1— 19,合成后总空气动力为ΔR。ΔR沿飞行方向的分力为拉力ΔT,与旋螺桨旋转方向相反的力ΔP 阻止螺旋桨转动。将整个桨叶上各小段的拉力和阻止旋转的力相加,形成该螺旋桨的拉力和阻止螺旋桨转动的力矩。 四、从以上两图还可以看到。必须使螺旋桨各剖面在升阻比较大的迎角工 作,才能获得较大的拉力,较小的阻力矩,也就是效率较高。螺旋桨工作时。轴向速度不随半径变化,而切线速度随半径变化。因此在接近桨尖,半径较大处气流角较小,对应桨叶角也应较小。而在接近桨根,半径较小处气流角较大,对应桨叶角也应较大。螺旋桨的桨叶角从桨尖到桨根应按一定规律逐渐加大。所以说螺旋桨是一个扭转了的机翼更为确切。 五、从图中还可以看到,气流角实际上反映前进速度和切线速度的比值。对 某个螺旋桨的某个剖面,剖面迎角随该比值变化而变化。迎角变化,拉力和阻力矩也随之变化。用进矩比“J”反映桨尖处气流角,J=V/nD。式中D—螺旋桨直径。理论和试验证明:螺旋桨的拉力(T),克服螺旋桨阻力矩所需的功率(P)和效率(η)可用下列公式计算: 六、T=Ctρn2D4 七、P=Cpρn3D5 八、η=J·Ct/Cp 九、式中:Ct—拉力系数;Cp—功率系数;ρ—空气密度;n—螺旋桨转速; D—螺旋桨直径。其中Ct和Cp取决于螺旋桨的几何参数,对每个螺旋桨其值随J变化。图1—1—21称为螺旋桨的特性曲线,它可通过理论计算或试验获得。特性曲线给出该螺旋桨拉力系数、功率系数和效率随前进比变化关系。是设计选择螺旋桨和计算飞机性能的主要依据之一。 十、从图形和计算公式都可以看到,当前进比较小时,螺旋桨效率很低。对 飞行速度较低而发动机转速较高的轻型飞机极为不利。例如:飞行速度为72千米/小时,发动转速为6500转/分时,η≈32%。因此超轻型飞机必须使用减速器,降低螺旋桨的转速,提高进距比,提高螺旋桨的效率。 十一、二、几何参数 十二、直径(D):影响螺旋桨性能重要参数之一。一般情况下,直径增大拉力随之增大,效率随之提高。所以在结构允许的情况下尽量选直径较大的螺旋桨。此外还要考虑螺旋桨桨尖气流速度不应过大(<音速),否则可能出现激波,导致效率降低。 十三、桨叶数目(B):可以认为螺旋桨的拉力系数和功率系数与桨叶数目成正比。超轻型飞机一般采用结构简单的双叶桨。只是在螺旋桨直径受到限制时,采用增加桨叶数目的方法使螺旋桨与发动机获得良好的配合。 十四、实度(σ):桨叶面积与螺旋桨旋转面积(πR2)的比值。它的影响与桨叶数目的影响相似。随实度增加拉力系数和功率系数增大。
【CN210027904U】一种无人飞机磁悬浮螺旋桨【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920426803.1 (22)申请日 2019.04.01 (73)专利权人 广东寰泰航空科技有限公司 地址 523106 广东省东莞市东城街道牛山 光明大道东城中云智慧城市产业园内 B栋3楼310号 (72)发明人 唐飞龙 (74)专利代理机构 重庆百润洪知识产权代理有 限公司 50219 代理人 刘立春 (51)Int.Cl. B64C 27/32(2006.01) B64D 27/24(2006.01) (54)实用新型名称 一种无人飞机磁悬浮螺旋桨 (57)摘要 本实用新型公开了一种无人飞机磁悬浮螺 旋桨,包括磁悬浮盒,磁悬浮盒的内部贯穿有转 子轴,磁悬浮盒的一侧活动连接有盒盖,盒盖与 磁悬浮盒的内表面且相对的一侧均固定连接有 绝磁板,两个绝磁板相对的一侧均固定连接有磁 环,所述转子轴的表面且位于两个磁环之间固定 连接有磁盘,本实用新型涉及无人机技术领域。 该无人飞机磁悬浮螺旋桨,在两个磁环之间设置 磁盘,利用磁盘与磁环之间的斥力,使磁环悬浮 在两个磁环之间,使转子轴克服了在无人机的重 力下表面与马达外壳内壁的挤压力,进而减小了 摩擦力,而磁性滤板内圈同样带有磁性,可将转 子轴稳定在轴心处,同样减小了转子轴表面与其 他物品的摩擦力, 使转子轴转动更顺畅。权利要求书1页 说明书3页 附图2页CN 210027904 U 2020.02.07 C N 210027904 U
权 利 要 求 书1/1页CN 210027904 U 1.一种无人飞机磁悬浮螺旋桨,包括磁悬浮盒(1),其特征在于:所述磁悬浮盒(1)的内部贯穿有转子轴(2),所述磁悬浮盒(1)的一侧活动连接有盒盖(3),所述盒盖(3)与磁悬浮盒(1)的内表面且相对的一侧均固定连接有绝磁板(4),两个所述绝磁板(4)相对的一侧均固定连接有磁环(5),所述转子轴(2)的表面且位于两个磁环(5)之间固定连接有磁盘(6),所述磁盘(6)的内部贯穿有滚珠(7),所述磁悬浮盒(1)的内表面固定连接有基座(8),所述基座(8)的一侧固定连接有销柱(9),所述盒盖(3)的一侧固定连接有卡套(10),且卡套(10)的内表面与销柱(9)的外表面卡接,所述销柱(9)的表面且位于基座(8)与卡套(10)之间套设有磁性滤板(11),且磁性滤板(11)的内部固定连接有滤网(12),所述盒盖(3)与磁悬浮盒(1)的内部均开设有透气孔(13),所述磁悬浮盒(1)的设置有两个,两个所述磁悬浮盒(1)之间固定连接有波纹外壳(15)。 2.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述盒盖(3)的一侧固定连接有轴承(14),且轴承(14)套设在转子轴(2)的外部。 3.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:两个所述磁悬浮盒(1)之间且位于波纹外壳(15)的内部固定连接有固定筒(16),且固定筒(16)的内表面固定连接有线圈(17)。 4.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述转子轴(2)的表面且位于固定筒(16)的内部固定连接有磁块(18),所述转子轴(2)的顶端固定连接有桨叶(19)。 5.根据权利要求3所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述波纹外壳(15)的一侧固定连接有塑料块(20),所述线圈(17)的两端均依次贯穿固定筒(16)和波纹外壳(15)并延伸至塑料块(20)的内部。 6.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述波纹外壳(15)、磁悬浮盒(1)与盒盖(3)的外部均套设有保护壳(21),所述保护壳(21)的一侧固定连接有支架(22)。 2
螺旋桨课程设计
螺旋桨图谱课程设计天津大学仁爱学院 姓名:陈旭东 学号:6010207038 专业:船舶与海洋工程 班级:2班 日期:2013.6.30
螺旋桨图谱课程设计 一.已知船体的主要参数 船 型:双机双桨多用途船 总 长: L=150.00m 设计水线长: WL L =144.00m 垂线 间长: PP L =141.00m 型 深: H=11.00m 设计 吃水: T=5.50m 型 宽: B=22.00m 方形 系数: B C =0.84 菱形 系数: P C =0.849 横剖面系数: M C =0.69 排水 量: ?=14000.00t 尾轴距基线距离: P Z =2.00m 二.主机参数 额定功率: MCR=1714h 额定转速: n=775r/min 齿轮箱减速比: i=5 旋向: 右旋 齿轮箱效率: G η=0.97 三.推进因子的确定 伴流分数 ω=0.248 ;推力减额分数 ; t=0.196 相对旋转效率 R η=1.00 ;船身效率 ;H η=11t ω --=1.0691 四.可以达到最大航速的计算 采用MAU 四叶桨图谱进行计算。 取功率储备为10% ,轴系效率S η=0.97 ,螺旋桨转速N=n/i=155r/min 螺旋桨敞水收到马力:D P = 1714 * 0.9 * S η*R η*G η =1714 * 0.9 * 0.97*1.00*0.97 =1451.43 (hp) 根据MAU4-40、MAU4-55、MAU4-70的P B δ-图谱列表计算如下:
项目 单位 数值 假定航速V kn 11 12 13 A V =(1-ω)V kn 8.27 9.02 9.78 0.5 2.5/P D A B NP V = 30.024 24.166 19.742 P B 5.479 4.916 4.443 MAU4-40 δ 65.4 59.732 54.377 P/D 0.692 0.728 0.764 0η 0.613 0.632 0.66 TE P =2D P ×H η×0η hp 1902.4 1961.38 2048.28 MAU4-55 δ 64 58.2 53.535 P/D 0.738 0.778 0.80 0η 0.588 0.614 0.642 TE P =2D P ×H η×0η hp 1824.83 1905.61 1992.41 MAU4-70 δ 63.3 57.4 52.8 P/D 0.751 0.796 0.842 0η 0.565 0.582 0.607 TE P =2D P ×H η×0η hp 1753.45 1806.21 1883.79 根据上表中的计算结果可以绘制TE P 、δ、P/D 及0η对V 的曲线,如图1所示。
螺旋桨的几何形体及制造工艺
第二章 螺旋桨几何形体与制造工艺 螺旋桨是目前应用最为广泛的一种推进器,因而也就成为“船舶推进”课程研究的主要对象。要研究螺旋桨的水动力特性,首先必须对螺旋桨的几何特性有所认识和了解。 § 2-1 螺旋桨的外形和名称 一、螺旋桨各部分名称 螺旋桨俗称车叶,其常见外观如图2-1所示。 螺旋桨通常装于船的尾部(但也有一些特殊船在首尾部都装有螺旋桨,如港口工作船及渡轮等),在船尾部中线处只装一只螺旋桨的船称为单螺旋桨船,左右各一者称为双螺旋桨船,也有三桨、四桨乃至五桨者。 螺旋桨通常由桨叶和桨毂构成(图2-2)。螺旋桨与尾轴联接部分称为桨毂,桨毂是一个截头的锥形体。为了减小水阻力,在桨毂后端加一整流罩,与桨毂形成一光顺流线形体,称为毂帽。 桨叶固定在桨毂上。普通螺旋桨常为三叶或四叶,二叶螺旋桨仅用于机帆船或小艇上,近来有些船舶(如大吨位大功率的油船),为避免振动而采用五叶或五叶以上的螺旋桨。 由船尾后面向前看时所见到的螺旋桨桨叶的一面 称为叶面,另一面称为叶背。桨叶与毂联接处称为叶根, 桨叶的外端称为叶梢。螺旋桨正车旋转时桨叶边缘在前 面者称为导边,另一边称为随边。 螺旋桨旋转时(设无前后运动)叶梢的圆形轨迹称为梢圆。梢圆的直径称为螺旋桨直径,以D 表示。梢圆的面积称为螺旋桨的盘面积,以A 0表示: A 0 =4 π2 D (2-1) 图2-1 ε x 叶面参考线 侧投影轮廓 桨叶 叶根 d 桨毂 O D K 转向 梢圆 螺旋 桨直径O D (b ) Z 导边 叶背 随边叶面叶根 毂帽 叶梢(端) x (a )ε 图2-2
当螺旋桨正车旋转时,由船后向前看去所见到的旋转方向为顺时针者称为右旋桨。反之,则为左旋桨。装于船尾两侧之螺旋桨,在正车旋转时其上部向船的中线方向转动者称为内旋桨。反之,则为外旋桨。 二、螺旋面及螺旋线 桨叶的叶面通常是螺旋面的一部分。为了清楚地了解螺旋桨的几何特征,有必要讨论一下螺旋面的形成及其特点。 设线段ab 与轴线oo 1成固定角度,并使ab 以等角速度绕轴oo 1旋转的同时以等线速度沿oo 1向上移动,则ab 线在空间所描绘的曲面即为等螺距螺旋面,如图2-3所示。线段ab 称为母线,母线绕行一周在轴向前进的距离称为螺距,以P 表示。 根据母线的形状及与轴线间夹角的变化可以得到不同形式的螺旋面。若母线为一直线且垂直于轴线,则所形成的螺旋面为正螺旋面如图2-4(a )所示。若母线为一直线但不垂直于轴线,则形成斜螺旋面,如图2-4(b )所示。当母线为曲线时,则形成扭曲的螺旋面如图2-4(c )及图2-4(d )所示。 母线上任一固定点在运动过程中所形成的轨迹为一螺旋线。任一共轴之圆柱面与螺旋面相交的交线也为螺旋线,图2-5(a )表示半径为R 的圆柱面与螺旋面相交所得的螺旋线BB 1B 2。如将此圆柱面展成平面,则此圆柱面即成一底长为2πR 高为P 的矩形,而螺旋 线变为斜线(矩形的对角线),此斜线称为节线。三角形B' B" B 2 " 称为螺距三角形,节线与底线间之夹角θ称为螺距角,如图2-5(b )所示。由图可知,螺距角可由下式来确定: tg θ = R P π2 (2-2) 三、螺旋桨的几何特性 1. 螺旋桨的面螺距 螺旋桨桨叶的叶面是螺旋面的一部分(图 2-6(a )),故任何与螺旋桨共轴的圆柱面与叶面的交线为螺旋线的一段,如图2-6(b )中的B 0C 0段。若将螺旋线段B 0C 0引长环绕轴线一周,则其两端之轴向距离等于此螺旋线的螺距P 。若螺旋桨的叶面为等螺距螺旋面之一部分,则P 即称为螺旋桨的面螺距。面螺距P 与直径 D 之比P /D 称为螺距比。将圆柱面展成平面后即得螺距三角形如图2-6(c )所示。 设上述圆柱面的半径为r ,则展开后螺距三角形的底边长为2πr ,节线与底线之间的夹角θ为半径r 处的螺距角,并可据下式来确定: (d ) (b ) (c )(a ) 图2-4 2" (b ) (a ) (b )(c ) (a )图2-6
航空基础知识
航空基础知识系列之一:飞机的分类 飞机的分类 由于飞机构造的复杂性,飞机的分类依据也是五花八门,我们可以按飞机的速度来划分,也可以按结构和外形来划分,还可以按照飞机的性能年代来划分,但最为常用的分类法为以下两种: 按飞机的用途分类: 飞机按用途可以分为军用机和民用机两大类。军用机是指用于各个军事领域的飞机,而民用机则是泛指一切非军事用途的飞机(如旅客机、货机、农业机、运动机、救护机以及试验研究机等)。军用机的传统分类大致如下: 歼击机:又称战斗机,第二次世界大战以前称驱逐机。其主要用途是与敌方歼击机进行空战,夺取制空权,还可以拦截敌方的轰炸机、强击机和巡航导弹。 强击机:又称攻击机,其主要用途是从低空和超低空对地面(水面)目标(如防御工事、地面雷达、炮兵阵地、坦克舰船等)进行攻
击,直接支援地面部队作战。 轰炸机:是指从空中对敌方前线阵地、海上目标以及敌后的战略目标进行轰炸的军用飞机。按其任务可分为战术轰炸机和战略轰炸机两种。 侦察机:是专门进行空中侦察,搜集敌方军事情报的军用飞机。按任务也可以分为战术侦察机和战略侦察机。 运输机:是指专门执行运输任务的军用飞机。 预警机:是指专门用于空中预警的飞机。 其它军用飞机:包括电子干扰机、反潜机、教练机、空中加油机、舰载飞机等等。 当然,随着航空技术的不断发展和飞机性能的不断完善,军用飞机的用途分类界限越来越模糊,一种飞机完全可能同时执行两种以上的军事任务,如美国的117战斗轰炸机,既可以实施对地攻击,又可以进行轰炸,还有一定的空中格斗能力。 按飞机的构造分类:
由于飞机构造复杂,因此按构造的分类就显得种类繁多。比如我们可以按机翼的数量可以将飞机分为单翼机、双翼机和多翼机;也可以按机翼的形状分为平直翼飞机、后掠翼飞机和三角翼飞机;我们还可以按飞机的发动机类别分为螺旋桨式和喷气式两种。 航空基础知识系列之二:飞机的结构 飞机的结构 飞机作为使用最广泛、最具有代表性的航空器,其主要组成部分有以下五部分: 推进系统:包括动力装置(发动机及其附属设备)以及燃料。其主要功能是产生推动飞机前进的推力(或拉力); 操纵系统:其主要功能是形成与传递操纵指令,控制飞机的方向舵及其它机构,使飞机按预定航线飞行;
四旋翼无人机原理以及组装过程
四旋翼无人机原理以及组装过程 1.硬件组成: 机架, 4个螺旋桨, 4个电机, 4个电调, 1信号接收器, 1个飞控板, 1个稳压模块, 一个电池 ?螺旋桨:四个螺旋桨都要提供升力,同时要抵消螺旋桨的自旋,所以需要正反桨,即对角的桨旋转反向相同,正反相同。相邻的桨旋转方向相 反,正反也相反。有字的一面是向上的(桨叶圆润的一面要和电机旋转 方向一致) ?电机:电机的kv值:1v电压,电机每分钟的空转速度。kv值越小,转动力越大。电机与螺旋桨匹配:螺旋桨越大,需要较大的转动力和需要 的较小的转速就可以提供足够大的升力,因此桨越大,匹配电机的kv值越小。 ?电调:将飞控板的控制信号,转变为电流的大小,控制电机的转速,同时给飞控板供电。电调将电池提供的11.1v的电压变为3.3v为飞控板供电。 ?信号接收器:接收遥控器的信号,给飞控板。通过飞控板供电。 ?遥控器:需要控制俯仰(y轴)、偏航(z轴)、横滚(x轴)、油门(高度),最少四个通道。遥控器分为美国手和日本手。美国手油门(摇杆不自动返回),偏转在左,俯仰,横滚在右。 ?飞控板:通过3个方向的陀螺仪和3轴加速度传感器控制飞行器的飞行姿态。
2.飞行原理 1.1 PID控制(P:比例控制 I:积分控制 D:微分控制): ?比例控制:将控制器输入的误差按照一定比例放大 ?积分控制:但是处于稳态的系统也会有一定的误差,为了消除稳态下的误差,将稳态下的误差在时间上积分,积分项随着时间的增大会趋于0, 因此积分减少了比例控制带来的稳态误差 ?微分控制:根据输入误差信号的变化率(微分)预测误差变化的趋势,避开被控对象的滞后特性,实现超前控制 ?参数调整:根据被控过程的特性不断调整PID控制器的比例系数、积分时间和微分时间的大小 1.2运动原理 四轴旋翼分为“+”和“x”型,“+”型飞控板的正前方是旋翼,“x”型飞控板正前方为夹角等分线。如下图为“x”型四旋翼的飞行原理图。 ?俯仰:绕y轴旋转,前低后高爬升,1,2转速减小,3,4转速增大,pitch 为负 ?横滚:绕x轴旋转,2,3转速增大,1,4转速减小,机体右滚,roll值为正 ?偏航:绕z轴旋转,假设2,4顺时针,1,3逆时针,当2,4转速增大,1,3转速减小时,机头右偏,yaw值为正 ?垂直:调节油门大小,四个旋翼的转速同时变大或者变小 pitch yaw roll值分析:
螺旋桨课程设计要点
JS813尾滑道渔船螺旋桨设计书 指导老师: 学生姓名: 学号: 完成日期:
1. 船型 单桨流线型舵,前倾首柱,巡洋舰尾,柴油机驱动,尾机型尾滑道渔船。 艾亚法有效功率估算表:
2.主机参数 3.推进因子的确定 (1)伴流分数ω 本船为单桨海上渔船,故使用汉克歇尔公式估算 ω=0.77*Cp-0.28=0.222 (2)推力减额分数t,用汉克歇尔公式估算 -0.3=0.203 t=0.77*C P (3)相对旋转效率 近似地取为ηR =1.0 (4)船身效率 ηH =(1-t)/(1-ω)=(1-0.203)/(1-0.222)=1.024 4.桨叶数Z的选取 根据一般情况,单桨船多用四叶,加之四叶图谱资料较为详尽、方便查找,
故选用四叶。 5.AE/A0的估算 按公式A E/A0 = (1.3+0.3×Z)×T / (p0-p v)D2 + k进行估算, 其中:T=P E/(1-t)V=137.2/((1-0.203×11×0.5144)=30.3kN 水温15℃时汽化压力p v=174 kgf/m2=174×9.8 N/m2=1.705 kN/m2 静压力p 0=p a +γh s =(10330+1025×1.5)×9.8 N/m2=116.302 kN/m2 k取0.2 D允许=0.7×T=0.7×2.2=1.5 A E/A0 = (1.3+0.3×Z)×T / (p0-p v)D2 + k =(1.3+0.3×4)×30.3/((121.324-1.705)×2.2×2.2)+0.2 = 0.494 6.桨型的选取说明 由于本船为海上渔船,MAU型原型螺旋桨比较适合在海洋中工作的要求。所以选用MAU型较适宜。 7.根据估算的AE/A0选取2~3张图谱 根据A E/A0=0.494选取MAU4-40, MAU4-55,MAU4-70三张图谱。 8.列表按所选图谱(考虑功率储备)进行终结设计,得到3组螺旋桨的要素及V sMAX 功率储备取16%,轴系效率ηS=0.98,齿轮箱效率ηG=0.96 螺旋桨敞水收到功率 P DO = Ps×0.9×0.98×ηS×ηG = 199×0.84×0.98×0.98×0.96 = 159.13kw = 213.3 hp (English) 由图谱可查得:
电工基础知识图文【最新版】
电工基础知识图文 一、通用部分 1、什麽叫电路? 电流所经过的路径叫电路。电路的组成一般由电源,负载和连接部分(导线,开关,熔断器)等组成。 2、什麽叫电源? 电源是一种将非电能转换成电能的装置。 3、什麽叫负载? 负载是取用电能的装置,也就是用电设备。 连接部分是用来连接电源与负载,构成电流通路的中间环节,是用来输送,分配和控制电能的。 4、电流的基本概念是什麽?
电荷有规则的定向流动,就形成电流,习惯上规定正电荷移动的方向为电流的实际方向。电流方向不变的电路称为直流电路。 单位时间内通过导体任一横截面的电量叫电流(强度),用符号I表示。 电流(强度)的单位是安培(A),大电流单位常用千安(KA)表示,小电流单位常用毫安(mA),微安(μA)表示。 1KA=1000A 1A=1000mA 1mA=1000μA 5、电压的基本性质? 1)两点间的电压具有惟一确定的数值。 2)两点间的电压只与这两点的位置有关,与电荷移动的路径无关。
3)电压有正,负之分,它与标志的参考电压方向有关。 4)沿电路中任一闭合回路行走一圈,各段电压的和恒为零。 电压的单位是伏特(V),根据不同的需要,也用千伏(KV),毫伏(mV)和微伏(μV)为单位。 1KV=1000V;1V=1000mV;1mV=1000μV。 6、电阻的概念是什麽? 导体对电流起阻碍作用的能力称为电阻,用符号R表示,当电压为1伏,电流为1安时,导体的电阻即为1欧姆(Ω),常用的单位千欧(KΩ),兆欧(MΩ)。 1MΩ=1000KΩ;1KΩ=1000Ω。 7、什麽是部分电路的欧姆定律? 流过电路的电流与电路两端的电压成正比,而与该电路的电阻成反比,这个关系叫做欧姆定律。用公式表示为:I=U/R
基于CATIA的船用螺旋桨三维建模方法
第47卷一第4期2018年8月一一一一一一一一一一一船海工程SHIP&OCEANENGINEERING一一一一一一一一一一一一一 Vol.47一No.4 Aug.2018 一一一 DOI:10.3963/j.issn.1671 ̄7953.2018.04.020 基于CATIA的船用螺旋桨三维建模方法 刘勇杰1?徐青2?胡勇1?郑绍春1 (1.武汉理工大学交通学院?武汉430063?2.广州文冲船厂有限责任公司?广州510727) 摘一要:针对船用螺旋桨三维外形较复杂的特点?提出一种基于CATIA平台的坐标变换的船用螺旋桨三维建模方法?给出由叶切面局部坐标系到全局坐标系的变换公式?采用Excel快速完成数据处理?用VB.net语言对CATIA进行二次开发?完成桨叶曲面型值数据的读取与批量导入?最终快速得到螺旋桨三维模型?该方法柔性好二效率高?可以根据不同设计参数快速得到对应的螺旋桨三维模型?并对模型进行优化处理? 关键词:船用螺旋桨?三维建模?CATIA?Excel?二次开发 中图分类号:U664.33一一一一文献标志码:A一一一一文章编号:1671 ̄7953(2018)04 ̄0084 ̄04 收稿日期:2017-10-17修回日期:2017-11-15 基金项目:国家自然科学基金项目(51379167)第一作者:刘勇杰(1992 )?男?硕士生研究方向:船舶先进制造技术 一一为了满足设计中不断改进?制造中节约成本?一次成型的需求?关于快速有效的船用螺旋桨三维建模方法研究集中在不需要计算?完全利用二维图 缠绕 变换来生成螺旋桨三维曲面[1]?基于CATIA软件平台?将二维图进行 逆向投影 的螺旋桨三维曲面建模[2]?通过坐标变换将变换后的螺旋桨曲面型值点导入Pro/E中得到光滑曲面?进而得到螺旋桨实体模型[3 ̄4]?设计螺旋桨二维图形和三维实体之间转换的代码[5]?等方面?为了避免传统几何建模方法的手工操作量大的缺点? 结合坐标变换自动化的思想?提出一种基于CAT ̄IA二次开发和坐标变换的船用螺旋桨三维建模新方法? 1一CATIA软件平台概述 CATIA软件提供了多种二次开发的接口?其 中包括自动化对象编程(V5Automation)和开放的基于构件的应用编程接口(CAA)?其中?Auto ̄ mation开发模式可以完成绝大部分开发工作?只有少部分不足之处才采取CAA开发方式进行补充?Automation开发模式又可分为以下几种? 1)VBAProject?采用CATIA提供的VBA集成开发环境进行程序设计?属于CATIA进程内?能够设计窗体界面?且可以方便地把生成的程序 添加到CATIA工具条中? 2)CATIA宏脚本?采用VBScript语言编写 代码?可以把程序集成到CATIA工具条中?但脚本程序的输入输出功能较弱?无法实现复杂的交互界面? 3)其他脚本语言?采用VBScript二JavaS ̄ cript二Python等语言编写代码?在CATIA以外执行(进程外)?可以写成短小灵活的代码集成到其他应用中? 4)高级语言?采用VB.net二C#等高级语言编 写代码?可以制作比较复杂的交互界面?利用.net优势简化复杂业务流程设计任务? 2一螺旋桨建模 螺旋桨的主要参数包括纵斜角(后倾角)二螺 距比二盘面比二母线到叶片随边的距离二母线到叶片导边的距离二叶片宽度二叶片厚度二导边至最厚点的距离和螺旋桨叶切面尺寸表等? 2.1一二维型值点计算 以直径为0.25m的MAU4-40型的模型螺旋桨为实例?根据MAU型螺旋桨桨叶轮廓尺寸表(见表1)计算得到模型螺旋桨的伸张轮廓尺寸?包括叶片宽度W(以最大叶片宽度的%表示)二母线到叶片随边的距离L1二母线到叶片导边的距离L2二叶片厚度T(以螺旋桨直径的%表示)二导边至最厚点的距离L3(以叶片宽度%表示)等?根据MAU型叶切面尺寸表(见表2)计算得到不同半径叶切面的二维型值点?以上数据组成了传统二维图纸中的数据信息? 由表1二2中参数的排布规律可知?选择Excel 4 8
螺旋桨加工工艺.doc
1.螺旋桨的加工 1.1机械加工 1.1.1 除掉桨毂两端的冒口,浇口等多余的部分,造成两个基准面,其光洁 度为 5,不平行度小于0.1mm。 1.1.2 在桨毂中心镗出或车出轴孔,光洁度为 25,不垂直度不超过0.15mm/M。 1.1.3 沿轴孔内侧插出镀槽,键槽两侧应与锥孔轴心行平行,装配后与键的 接触面不少于75%。 1.1.4 锥体与键孔的连接,亦可以分为有粘合和无缝粘合两中情形。有键和 无键时,对轴毂和轴的要求均不同。有键环痒粘合,要求锥孔大小端 各留有 30~70mm长度的配合面。其余则低 0.2`~0.3mm,以便研配,对 轴上锥体中无空腔(图 1.B 示意)。{ 两种粘合装配螺旋桨情况见图一 } 当采用环痒粘合时,键和键槽的加工要求和结合要求均可降低,减少了研 配的工作量。 1.1.5 环氧粘合剂的配方(重量比)见下表(供参考) 表一 粘合剂增型剂充填材料固化剂 环氧树脂二丁脂15 份熟石膏粉75 份乙二胺 6.5~6.6 (B101)100 份份 1.2手工加工 手工加工的内容有:桨叶轮毂,叶片,桨毂表面加工以及修刮轴孔,消除静不平衡,采用风铲,砂轮几锉刀等工具。 步骤是:根据测量的结果,划出加工线,批凿桨叶轮廓,铲除毛坯上多余
的金属,使螺旋桨具有所需要的光洁度。 1.2.1 叶面的加工 在制作叶面样板时,一般将全部加工余量都放在叶背上,认为叶面朝下,浇铸质量容易保证表面光顺,所以叶面的加工只是消除铸成面个别不平部分,但是在多数情况下,桨叶面的几何形状总有偏差。叶面加工的任 务是修正铸造时造成的偏差。加工时,根据铸件的测量结果,在桨叶每个半径切面上标出必须除去金属层的厚度的若干点,再在各点钻出除厚刚 好等于要除去金属层的厚度的孔。光沿桨叶半径切面铲去多余的金属而 得若干光顺的螺旋桨线,再以这些螺旋桨线为基准,沿桨叶径向铲去多余的金属,便可完成叶面加工。 1.2.2 叶背加工(对叶面不加工的工厂,仅在此面消除静不平衡) 叶背加工以叶面为基准面,在叶面加工后,重新测量桨叶厚度,并根 图纸要求,决定需要从叶背铲除金属的厚度,与叶面加工一样,先钻 孔,铲除各切面形状曲线,然后再沿桨叶径向铲除多余的金属。 2.螺旋桨的静平衡 螺旋桨的静平衡是其加工中不可缺少的一道工序,用来消除不平衡的离心力,以减少振动。静平衡的步骤和要求如下: 在螺旋桨锥孔中装一心轴,将心轴的两端搁置在有水平刀口或滚珠轴承的支架上,使螺旋桨能自由的转动,并能自由停止。这时较重的桨叶总是向下。若在轻的桨叶上加某一重物,(一般粘贴橡皮泥使螺旋桨得到平衡)则加上的重量就是较重桨叶多出的重量,铲除此重量就能等到平衡(但应注意相应位置)。多余的重量要从叶背铲除,面积要广,剔除后表面应光
航空基础知识
飞机的分类 由于飞机构造的复杂性,飞机的分类依据也是五花八门,我们可以按飞机的速度来划分,也可以按结构和外形来划分,还可以按照飞机的性能年代来划分,但最为常用的分类法为以下两种: 按飞机的用途分类: 飞机按用途可以分为军用机和民用机两大类。军用机是指用于各个军事领域的飞机,而民用机则是泛指一切非军事用途的飞机(如旅客机、货机、农业机、运动机、救护机以及试验研究机等)。军用机的传统分类大致如下: 歼击机:又称战斗机,第二次世界大战以前称驱逐机。其主要用途是与敌方歼击机进行空战,夺取制空权,还可以拦截敌方的轰炸机、强击机和巡航导弹。 强击机:又称攻击机,其主要用途是从低空和超低空对地面(水面)目标(如防御工事、地面雷达、炮兵阵地、坦克舰船等)进行攻击,直接支援地面部队作战。 轰炸机:是指从空中对敌方前线阵地、海上目标以及敌后的战略目标进行轰炸的军用飞机。按其任务可分为战术轰炸机和战略轰炸机两种。 侦察机:是专门进行空中侦察,搜集敌方军事情报的军用飞机。按任务也可以分为战术侦察机和战略侦察机。 运输机:是指专门执行运输任务的军用飞机。 预警机:是指专门用于空中预警的飞机。 其它军用飞机:包括电子干扰机、反潜机、教练机、空中加油机、舰载飞机等等。 当然,随着航空技术的不断发展和飞机性能的不断完善,军用飞机的用途分类界限越来越模糊,一种飞机完全可能同时执行两种以上的军事任务,如美国的F-117战斗轰炸机,既可以实施对地攻击,又可以进行轰炸,还有一定的空中格斗能力。 按飞机的构造分类: 由于飞机构造复杂,因此按构造的分类就显得种类繁多。比如我们可以按机翼的数量可以将飞机分为单翼机、双翼机和多翼机;也可以按机翼的形状分为平直翼飞机、后掠翼飞机和三角翼飞机;我们还可以按飞机的发动机类别分为螺旋桨式和喷气式两种。
螺旋桨课程设计模板
265吨围网渔船螺旋桨设计书 指导老师: 杜月中 学生姓名: 衡星 学号: U 12224 完成日期: /05/01
1. 船型 单桨流线型平衡舵, 前倾首柱, 巡洋舰尾, 柴油机驱动, 中机型围网渔船。 2.主机参数 艾亚法有效功率估算表: 速度V(kn) 11 12 13 Froude数v s /√gL0.297 0.325 0.352 标准C 查图9-4 260 215 160 标准C bc ,查表9-3 0.58 0.53 0.49 实际C b (肥或瘦)(%) -4.48 4.52 13.06 C b 修正(%) 2.29 -7.51 -21.70 C b 修正数量Δ 1 5.95 -1 6.14 -34.70 已修正C b 之C 1 266 199 125 B/T修正% -3.44 -3.44 -3.44 B/T修正数量, Δ 2 -9.15 -6.85 -4.30 已修正B/T之C 2 257 192 121 标准x c ,%L, 船中后 1.99 2.35 2.49 实际x c , %L, 船中后 3.46 3.46 3.46 相差%L, 在标准后 1.47 1.11 0.97 x c 修正(%),查表9-5 0.6 0.2 1 已修正x c 之C 3 255 192 121 长度修正%=(L wl -1.025L pp )/L wl *100% 4 4 4 长度修正Δ 4 10.20 768.00 4.84 已修正长度之C4 265 200 126 V31331 1728 2197
P E=Δ0.64*V 3*0.735/C 4 (kW) 188 323 651 3.推进因子的确定 (1)伴流分数w 本船为单桨渔船, 故使用汉克歇尔公式估算 w=0。77×Cp-0.28=0.5×0.62-0.28=0.1974 (2)推力减额分数t 使用汉克歇尔公式 t=0.77×C P -0.3=0.77×0.62-0.3=0.1774 (3)相对旋转效率 近似地取为ηR =1.0 (4)船身效率 ηH =(1-t)/(1-w)=(1-0.1774)/(1-0.1974)=1.025 4.桨叶数Z 的选取 根据一般情况, 单桨船多用四叶, 加之四叶图谱资料较为详尽、 方便查找, MAU 图谱主要为四叶桨, 故选用四叶。 5.A E /A 0的估算 按公式A E /A 0 = (1.3+0.3×Z)×T / (p 0-p v )D 2 + k 进行估算, 其中: T=P E /(1-t)V=323/((1-0.1774)×12×0.5144)=63.6kN 水温15℃时汽化压力p v =174 kgf/m 2=174×9.8 N/m 2=1.705