【CN109933661A】一种基于深度生成模型的半监督问答对归纳方法和系统【专利】

(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910266295.X
(22)申请日 2019.04.03
(71)申请人 上海乐言信息科技有限公司
地址 200030 上海市徐汇区番禺路1028号
数娱大厦8楼
(72)发明人 褚善博 沈李斌
(51)Int.Cl.
G06F 16/332(2019.01)
(54)发明名称
一种基于深度生成模型的半监督问答对归
纳方法和系统
(57)摘要
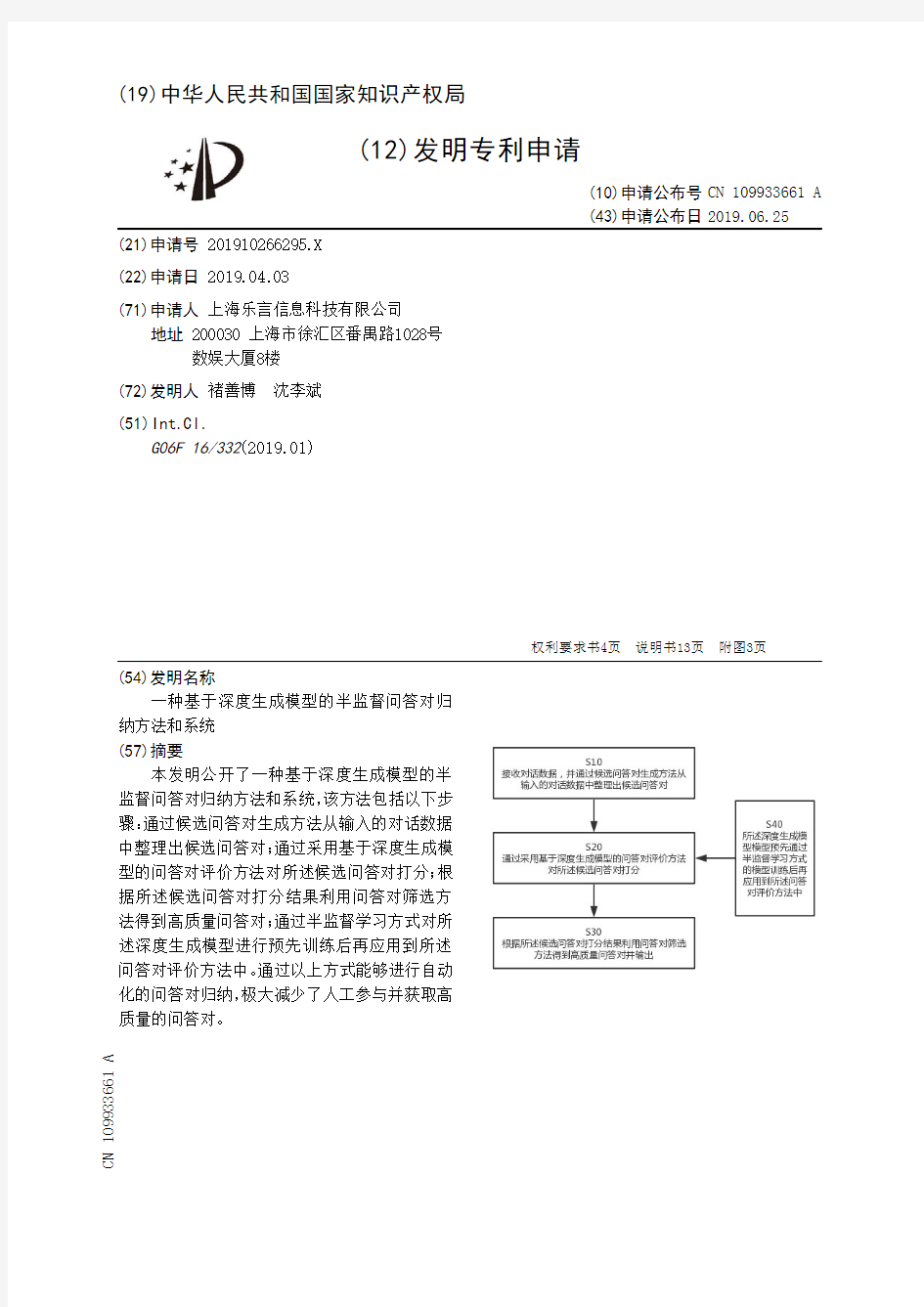
本发明公开了一种基于深度生成模型的半
监督问答对归纳方法和系统,该方法包括以下步
骤:通过候选问答对生成方法从输入的对话数据
中整理出候选问答对;通过采用基于深度生成模
型的问答对评价方法对所述候选问答对打分;根
据所述候选问答对打分结果利用问答对筛选方
法得到高质量问答对;通过半监督学习方式对所
述深度生成模型进行预先训练后再应用到所述
问答对评价方法中。通过以上方式能够进行自动
化的问答对归纳,极大减少了人工参与并获取高
质量的问答对。权利要求书4页 说明书13页 附图3页CN 109933661 A 2019.06.25
C N 109933661
A
权 利 要 求 书1/4页CN 109933661 A
1.一种问答对归纳方法,其特征在于,问答对归纳的自动化方法包括以下步骤:
通过候选问答对生成方法从输入的对话数据中整理出候选问答对;
通过采用基于深度生成模型的问答对评价方法对所述候选问答对打分;
根据所述候选问答对打分结果利用问答对筛选方法得到高质量问答对;
通过半监督学习方式对所述深度生成模型进行预先训练后再应用到所述问答对评价方法中。
2.一种问答对归纳方法,其特征在于,问答对归纳的自动化方法包括以下步骤:
通过候选问答对生成方法从输入的对话数据中整理出候选问答对;
通过采用基于深度生成模型的问答对评价方法对所述候选问答对打分;
根据所述候选问答对打分结果利用问答对筛选方法得到高质量问答对;
通过半监督学习方式对所述深度生成模型进行预先训练后再应用到所述问答对评价方法中。
3.根据权利要求1所述的问答对归纳方法,其特征在于,所述问答对评价方法使用的半监督学习方式训练的深度生成模型可采用序列到序列(Sequence to Sequence)的深度生成模型,如,基于Transformer的Sequence to Sequence模型,和基于LSTM和GRU等的 encoder、decoder的sequence to sequence模型,还可采用统计机器翻译中用到的生成模型。
4.根据权利要求3所述的问答对归纳方法,其特征在于,所述基于Transformer的Sequence to Sequence模型参数设置为:multi-head的数量设置为8,encoder和decoder中layer为6,进一步地,所述模型的输入端使用预训练的字向量拼接所述字的位置向量,进一步地,使用word2vec训练字向量,字向量维度设置为100。
5.根据权利要求3所述的问答对归纳方法,其特征在于,所述半监督学习方式训练的深度生成模型采用的可采用自学习(Self Learning)的半监督方法、基于EM(Expectation Maximization)算法的生成式半监督方法以及基于图的半监督学习等。
6.根据权利要求5所述的问答对归纳方法,其特征在于,所述采用自学习方式训练的基于Transformer的Sequence to Sequence模型训练步骤进一步包括:
通过问答对生成方法从训练用对话数据中获得训练数据,进一步,从中采样,其中,采样部分数据标记为“未审阅有效问答对”,生成数据集De,剩余部分标记为“未审阅问答对”,生成数据集Dw;
通过人工审阅过程对所述“未审阅有效问答对”数据集De进行审核,得到高质量的问答对数据集Dc;
使用所述数据集Dc与所述数据集Dw作为训练数据,采用所述自学习方式对所述基于Transformer的Sequence to Sequence模型进行训练。
7.根据权利要求6所述的问答对归纳方法,其特征在于,所述问答对生成方法可通过基于启发式规则实现,执行步骤进一步包括:
将训练用对话数据中问题语句和回复语句按照长度过滤,筛选出满足长度条件的对话语句;
按照位置顺序,分别判断每个回复语句在所述对话语句中是否位于两个问题语句之间,或者是否紧接最后一个问题语句且位于所述对话语句的结束句处,若是,寻找对应回复
2
(完整版)深度神经网络及目标检测学习笔记(2)
深度神经网络及目标检测学习笔记 https://youtu.be/MPU2HistivI 上面是一段实时目标识别的演示,计算机在视频流上标注出物体的类别,包括人、汽车、自行车、狗、背包、领带、椅子等。 今天的计算机视觉技术已经可以在图片、视频中识别出大量类别的物体,甚至可以初步理解图片或者视频中的内容,在这方面,人工智能已经达到了3岁儿童的智力水平。这是一个很了不起的成就,毕竟人工智能用了几十年的时间,就走完了人类几十万年的进化之路,并且还在加速发展。 道路总是曲折的,也是有迹可循的。在尝试了其它方法之后,计算机视觉在仿生学里找到了正确的道路(至少目前看是正确的)。通过研究人类的视觉原理,计算机利用深度神经网络(Deep Neural Network,NN)实现了对图片的识别,包 括文字识别、物体分类、图像理解等。在这个过程中,神经元和神经网络模型、大数据技术的发展,以及处理器(尤其是GPU)强大的算力,给人工智能技术 的发展提供了很大的支持。 本文是一篇学习笔记,以深度优先的思路,记录了对深度学习(Deep Learning)的简单梳理,主要针对计算机视觉应用领域。 一、神经网络 1.1 神经元和神经网络 神经元是生物学概念,用数学描述就是:对多个输入进行加权求和,并经过激活函数进行非线性输出。 由多个神经元作为输入节点,则构成了简单的单层神经网络(感知器),可以进行线性分类。两层神经网络则可以完成复杂一些的工作,比如解决异或问题,而且具有非常好的非线性分类效果。而多层(两层以上)神经网络,就是所谓的深度神经网络。 神经网络的工作原理就是神经元的计算,一层一层的加权求和、激活,最终输出结果。深度神经网络中的参数太多(可达亿级),必须靠大量数据的训练来“这是苹在父母一遍遍的重复中学习训练的过程就好像是刚出生的婴儿,设置。.果”、“那是汽车”。有人说,人工智能很傻嘛,到现在还不如三岁小孩。其实可以换个角度想:刚出生婴儿就好像是一个裸机,这是经过几十万年的进化才形成的,然后经过几年的学习,就会认识图片和文字了;而深度学习这个“裸机”用了几十年就被设计出来,并且经过几个小时的“学习”,就可以达到这个水平了。 1.2 BP算法 神经网络的训练就是它的参数不断变化收敛的过程。像父母教婴儿识图认字一样,给神经网络看一张图并告诉它这是苹果,它就把所有参数做一些调整,使得它的计算结果比之前更接近“苹果”这个结果。经过上百万张图片的训练,它就可以达到和人差不多的识别能力,可以认出一定种类的物体。这个过程是通过反向传播(Back Propagation,BP)算法来实现的。 建议仔细看一下BP算法的计算原理,以及跟踪一个简单的神经网络来体会训练的过程。
基于深度学习的图像字幕生成方法研究
基于深度学习的图像字幕生成方法研究 发表时间:2019-02-28T15:08:21.577Z 来源:《基层建设》2018年第36期作者:王珊珊 [导读] 摘要:几年之前,由于计算能力的不足以及大规模图像字幕数据集的缺少,这就导致了国外很少有人做这方面的研究,其所得到的结果也让人不尽满意,在国内更是鲜有人涉及这个方向。 华风气象影视技术中心北京 100000 摘要:几年之前,由于计算能力的不足以及大规模图像字幕数据集的缺少,这就导致了国外很少有人做这方面的研究,其所得到的结果也让人不尽满意,在国内更是鲜有人涉及这个方向。不过,随着近两年计算机运算能力的提高、深度学习(DL)的发展以及众多大规模图像字幕数据集的出现,这才使得这项任务重新回归到人们的视野并逐渐成为了计算机视觉与自然语言处理领域中的一个研究热点。本文就图像字幕生成任务中所涉及的深度学习算法,在总结前人提出的各种网络及其成效的基础上,研究适合图像字幕生成任务的深度学习模型,为该研究方向提供一定的指导意义。 关键词:深度学习;图像字幕;生成方法 1图像字幕生成概述 图像字幕生成是继图像识别、目标定位、图像分割后又一新型计算机视觉任务。在计算机视觉发展的初期,研究者们尝试利用计算机程序来模拟人类视觉系统,并让其告诉我们它看到了什么,这也就是最基本的图像识别。继图像识别之后,人们又提出更高的要求,即在识别的基础上确定目标在图像中的位置或将其从图像中分割出来。但是,上述任务都是将图像划分到一个或者多个离散的标签中去,它既没有描述出图像中各个对象的关系,也没有给出图像中正在发生的事情。为此,图像字幕生成应运而生,图像字幕生成方法也开始逐渐产生、发展并不断成熟起来。上个世纪七十年代,研究者们认为要让计算机理解它所看到的是什么东西时,必须像人眼一样具有立体视觉。在这种认知的情况下,研究者们希望把物体的三维结构从图像中恢复出来,并在此基础上再让计算机理解和判断。到了八九十年代,研究人员发现要让计算机理解图像,不一定要先恢复物体的三维结构,而是靠物体所具有的一些表面或局部特征。例如,当计算机识别一个苹果时,假设计算机事先知道苹果的形状纹理等特征,并且建立了这样一个先验知识库,那么计算机就可以将看到的物体的特征与先验知识库中的特征进行匹配。如果能够匹配,计算机就可以被认为理解了这个物体。随后,研究者们又利用这些特征,设计各种分类器来达到理解图像的目的。在计算机理解图像的基础上,研究者们又设计不同的算法来实现目标定位、图像分割、简单的图像字幕生成。其中,传统的图像字幕生成方法就是在得到图像里面的不同物体的基础上,采用自然语言处理技术通过一些检索的方法生成对应的字幕描述。 2基于深度学习的图像字幕生成方法研究 深度学习是机器学习(ML)领域中的一个新的研究方向,它的概念来源于人工神经网络(ANN)的研究,其实质就是通过构建机器学习模型和利用海量的训练数据,来逐层变化特征,以提升分类或者预测的准确性。同传统的机器学习方法一样,深度学习也有监督学习和无监督学习之分,不同学习框架下建立的学习模型也是不同的。 2.1基于卷积与循环神经网络的图像字幕生成 2.1.1基于卷积神经网络的图像特征提取 图像特征提取是指计算机经过一系列算法将一幅原始RGB图像转化成一个特征向量或一个特征矩阵,该向量或矩阵就在其空间中代表了这幅图像。图像特征一般包括低级特征和高级特征。常见的低级特征包括颜色特征、纹理特征、形状特征、空间关系特征。低级特征的优点是计算简单直接,缺点是对图像敏感,不能反映图像本身所包含的对象信息。图像的高级特征是指该特征包含了一定的语义信息,利用该特征可以更加容易地识别该图像所包含的内容。本文将利用最先进的卷积神经网络结构进行图像特征提取,常见的有AlexNet、VGG、GoogleNet、ResNet等,这些网络在ImageNet图像分类比赛(ImageNet是由美国斯坦福大学计算机视觉实验室建立的,目前世界上最大的图像识别数据库)中可以达到与人类相媲美的优异结果。本文同大多数计算机视觉应用一样,将采用在ImageNet数据集上预训练好的卷积神经网络,然后通过迁移学习的方法将其用于图像字幕生成任务。对于上述任何一个卷积神经网络可以将其简化成如下图的结构: 2.1.2基于循环神经网络的语言建模与生成 图像可以通过卷积神经网络转变成含有高级语义信息的特征向量。类似的,对于句子也要将其转换成向量才能方便后续处理。一般的,句子往往是由很多个单词组成,将每个单词转变成成一个有意义的词向量比向量化整个句子处理起来更加灵活。有了词向量以后,句子则可以通过一系列按顺序排列的词向量表示。为了能表示出所有字幕,本章将字幕集出现过的所有单词组成一个集合,并将该集合形象化地称为“字典(V ocabulary)”。对于字典里的所有单词,可以将其按顺序排列,并将其序号作为其唯一索引。假设字典的大小为V,即字典共包含V个单词。对于每一个单词,为了方便可以将其进行独热(One-hot)编码,即用长度为V的向量S表示,该向量除了单词对应的索引位为1以外其余全部为0。one-hot编码只是给出了单词的唯一索引信息,想要将其应用在其他任务中就必须将其特征向量化,即word2vec (Word to Vector)。常见的word2vec模型有CBoW(Continuous Bag of Words)模型、Skip-grams模型,采用这些模型就必须单独将其在语料库上训练,这同样会导致模型不能进行端到端训练。近些年,研究证明循环神经网络是一种非常适合该任务的时序模型,它不仅可以根据语句的上下文信息完成word2vec,还可以非常方便地生成新的句子。 2.2基于注意力机制模型的图像字幕生成 2.2.1图像特征提取 上一节的图像字幕生成模型所提取的图像特征是来自卷积神经网络最后的全连接层,它是一个一维向量。因此,它只包含了图像全局的语义信息,而丢失了图像内容之间的位置信息。对于图像的卷积运算来说,它有一个很好的特点,就是卷积的结果能够保留输入图像大致的位置信息。因此,不含有全连接网络的卷积神经网络同样具有这个性质。根据上述思想,为了将每个特征向量与二维图像内容的位置
BIM模型深度LOD的定义及辨析
模型的细致程度,英文称作Level of Details,也叫作Level of Development。描述了一个BIM模型构件单元从最低级的近似概念化的程度发展到最高级的演示级精度的步骤。美国建筑师协会(AIA)为了规范BIM参与各方及项目各阶段的界限,在其2008年的文档E202中定义了LOD的概念。这些定义可以根据模型的具体用途进行进一步的发展。LOD的定义可以用于两种途径:确定模型阶段输出结果(Phase Outcomes)以及分配建模任务(Task Assignments)。 模型阶段输出结果(Phase Outcomes) 随着设计的进行,不同的模型构件单元会以不同的速度从一个LOD等级提升到下一个。例如,在传统的项目设计中,大多数的构件单元在施工图设计阶段完成时需要达到LOD300的等级,同时在施工阶段中的深化施工图设计阶段大多数构件单元会达到LOD400的等级。但是有一些单元,例如墙面粉刷,永远不会超过LOD100的层次。即粉刷层实际上是不需要建模的,它的造价以及其他属性都附着于相应的墙体中。 任务分配(Task Assignments) 在三维表现之外,一个BIM模型构件单元能包含非常大量的信息,这个信息可能是多方来提供。例如,一面三维的墙体或许是建筑师创建的,但是总承包方要提供造价信息,暖通空调工程师要提供U值和保温层信息,一个隔声承包商要提供隔声值的信息,等等。为了解决信息输入多样性的问题,美国建筑师协会文件委员会提出了“模型单元作者”(MCA)的概念,该作者需要负责创建三维构件单元,但是并不一定需要为该构件单元添加其他非本专业的信息。 在一个传统项目流程中,模型单元作者(MCA)的分配极有可能是和设计阶段一致的–设计团队会一直将建模进行到施工图设计阶段,而分包商和供应商将会完成需要的深化施工图设计建模工作。然而,在一个综合项目交付(IPD)的项目中,任务分配的原则是“交给最好的人”,因此在项目设计过程中不同的进度点会发生任务的切换。例如,一个暖通空调的分包商可能在施工图设计阶段就将作为模型单元作者来负责管道方面的工作。 LOD被定义为5个等级,从概念设计到竣工设计,已经足够来定义整个模型过程。但是,为了给未来可能会插入等级预留空间,定义LOD为100到500。具体的等级如下: 模型的细致程度,定义如下: 100. Conceptual 概念化 200. Approximate geometry 近似构件(方案及扩初) 300. Precise geometry 精确构件(施工图及深化施工图) 400. Fabrication 加工 500. As-built 竣工 LOD 100–等同于概念设计,此阶段的模型通常为表现建筑整体类型分析的建筑体量,分析包括体积,建筑朝向,每平方造价等等。
(完整版)深度神经网络全面概述
深度神经网络全面概述从基本概念到实际模型和硬件基础 深度神经网络(DNN)所代表的人工智能技术被认为是这一次技术变革的基石(之一)。近日,由IEEE Fellow Joel Emer 领导的一个团队发布了一篇题为《深度神经网络的有效处理:教程和调研(Efficient Processing of Deep Neural Networks: A Tutorial and Survey)》的综述论文,从算法、模型、硬件和架构等多个角度对深度神经网络进行了较为全面的梳理和总结。鉴于该论文的篇幅较长,机器之心在此文中提炼了原论文的主干和部分重要内容。 目前,包括计算机视觉、语音识别和机器人在内的诸多人工智能应用已广泛使用了深度神经网络(deep neural networks,DNN)。DNN 在很多人工智能任务之中表现出了当前最佳的准确度,但同时也存在着计算复杂度高的问题。因此,那些能帮助DNN 高效处理并提升效率和吞吐量,同时又无损于表现准确度或不会增加硬件成本的技术是在人工智能系统之中广泛部署DNN 的关键。 论文地址:https://https://www.360docs.net/doc/415203897.html,/pdf/1703.09039.pdf 本文旨在提供一个关于实现DNN 的有效处理(efficient processing)的目标的最新进展的全面性教程和调查。特别地,本文还给出了一个DNN 综述——讨论了支持DNN 的多种平台和架构,并强调了最新的有效处理的技术的关键趋势,这些技术或者只是通过改善硬件设计或者同时改善硬件设计和网络算法以降低DNN 计算成本。本文也会对帮助研究者和从业者快速上手DNN 设计的开发资源做一个总结,并凸显重要的基准指标和设计考量以评估数量快速增长的DNN 硬件设计,还包括学界和产业界共同推荐的算法联合设计。 读者将从本文中了解到以下概念:理解DNN 的关键设计考量;通过基准和对比指标评估不同的DNN 硬件实现;理解不同架构和平台之间的权衡;评估不同DNN 有效处理技术的设计有效性;理解最新的实现趋势和机遇。 一、导语 深度神经网络(DNN)目前是许多人工智能应用的基础[1]。由于DNN 在语音识别[2] 和图像识别[3] 上的突破性应用,使用DNN 的应用量有了爆炸性的增长。这些DNN 被部署到了从自动驾驶汽车[4]、癌症检测[5] 到复杂游戏[6] 等各种应用中。在这许多领域中,DNN 能够超越人类的准确率。而DNN 的出众表现源于它能使用统计学习方法从原始感官数据中提取高层特征,在大量的数据中获得输入空间的有效表征。这与之前使用手动提取特征或专家设计规则的方法不同。 然而DNN 获得出众准确率的代价是高计算复杂性成本。虽然通用计算引擎(尤其是GPU),已经成为许多DNN 处理的砥柱,但提供对DNN 计算更专门化的加速方法也越来越热门。本文的目标是提供对DNN、理解DNN 行为的各种工具、有效加速计算的各项技术的概述。 该论文的结构如下:
BIM建模技术
BIM建模技术 一、单选题 1. 在设置视图范围中,以下说法不正确的是() A. 顶高度一定大于底高度 B. 视图深度标高一定大于底标高 C. 视图深度标高一定小于或等于底标高 D. 剖切面高度在顶高度和底高度之间 答案:B 2. 在Revit 项目浏览器中,在三维视图名称上右键,然后选择“显示相机”,在绘图区域中相机显示为() A. 蓝色空心圆为焦点,粉色原点为目标点 B. 蓝色空心圆点为目标点,粉色圆点为焦点 C. 焦点和目标点均为粉色圆点 D. 焦点和目标点均为蓝色空心圆点 答案:A 3. 下列各类图元,属于基准图元的是?() A. 轴网 B. 楼梯 C. 天花板 D. 桁架 答案:A 4.在精细视图下,管道默认为下述()方式显示。 A. 单线 B. 双线
D. 网格 答案:B 5. 在平面视图中可以给一下哪种图元放置高程点() A. 墙体 B. 门窗洞口 C. 楼梯 D. 线条 答案:C 6.在2F(2F 标高为4000mm)平面图中,创建600mm 高的结构梁,将梁属性栏中的Z轴对正设置为底,将Z 轴偏移设置为-200mm,那么该结构梁的顶标高为() A. 4600mm B. 3400mm C. 4400mm D. 4800mm 答案:C 7.对于大型的模型,如果放在一个大模型里,最终的Rvt 文件会非常大。所以常需要在建模之前对模型进行分块建模的计划。关于模型拆分原则下属表达错误的是() A. 按照专业拆分 B. 按照楼号拆分 C. 按照楼层拆分 D. 按照房间使用属性拆分 答案:D 8.在门的类型属性对话框中,点击左下角的预览会出现预览视图,不包含以下哪种视图()。 A. 三维视图 B. 立面视图
【CN109933661A】一种基于深度生成模型的半监督问答对归纳方法和系统【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910266295.X (22)申请日 2019.04.03 (71)申请人 上海乐言信息科技有限公司 地址 200030 上海市徐汇区番禺路1028号 数娱大厦8楼 (72)发明人 褚善博 沈李斌 (51)Int.Cl. G06F 16/332(2019.01) (54)发明名称 一种基于深度生成模型的半监督问答对归 纳方法和系统 (57)摘要 本发明公开了一种基于深度生成模型的半 监督问答对归纳方法和系统,该方法包括以下步 骤:通过候选问答对生成方法从输入的对话数据 中整理出候选问答对;通过采用基于深度生成模 型的问答对评价方法对所述候选问答对打分;根 据所述候选问答对打分结果利用问答对筛选方 法得到高质量问答对;通过半监督学习方式对所 述深度生成模型进行预先训练后再应用到所述 问答对评价方法中。通过以上方式能够进行自动 化的问答对归纳,极大减少了人工参与并获取高 质量的问答对。权利要求书4页 说明书13页 附图3页CN 109933661 A 2019.06.25 C N 109933661 A
权 利 要 求 书1/4页CN 109933661 A 1.一种问答对归纳方法,其特征在于,问答对归纳的自动化方法包括以下步骤: 通过候选问答对生成方法从输入的对话数据中整理出候选问答对; 通过采用基于深度生成模型的问答对评价方法对所述候选问答对打分; 根据所述候选问答对打分结果利用问答对筛选方法得到高质量问答对; 通过半监督学习方式对所述深度生成模型进行预先训练后再应用到所述问答对评价方法中。 2.一种问答对归纳方法,其特征在于,问答对归纳的自动化方法包括以下步骤: 通过候选问答对生成方法从输入的对话数据中整理出候选问答对; 通过采用基于深度生成模型的问答对评价方法对所述候选问答对打分; 根据所述候选问答对打分结果利用问答对筛选方法得到高质量问答对; 通过半监督学习方式对所述深度生成模型进行预先训练后再应用到所述问答对评价方法中。 3.根据权利要求1所述的问答对归纳方法,其特征在于,所述问答对评价方法使用的半监督学习方式训练的深度生成模型可采用序列到序列(Sequence to Sequence)的深度生成模型,如,基于Transformer的Sequence to Sequence模型,和基于LSTM和GRU等的 encoder、decoder的sequence to sequence模型,还可采用统计机器翻译中用到的生成模型。 4.根据权利要求3所述的问答对归纳方法,其特征在于,所述基于Transformer的Sequence to Sequence模型参数设置为:multi-head的数量设置为8,encoder和decoder中layer为6,进一步地,所述模型的输入端使用预训练的字向量拼接所述字的位置向量,进一步地,使用word2vec训练字向量,字向量维度设置为100。 5.根据权利要求3所述的问答对归纳方法,其特征在于,所述半监督学习方式训练的深度生成模型采用的可采用自学习(Self Learning)的半监督方法、基于EM(Expectation Maximization)算法的生成式半监督方法以及基于图的半监督学习等。 6.根据权利要求5所述的问答对归纳方法,其特征在于,所述采用自学习方式训练的基于Transformer的Sequence to Sequence模型训练步骤进一步包括: 通过问答对生成方法从训练用对话数据中获得训练数据,进一步,从中采样,其中,采样部分数据标记为“未审阅有效问答对”,生成数据集De,剩余部分标记为“未审阅问答对”,生成数据集Dw; 通过人工审阅过程对所述“未审阅有效问答对”数据集De进行审核,得到高质量的问答对数据集Dc; 使用所述数据集Dc与所述数据集Dw作为训练数据,采用所述自学习方式对所述基于Transformer的Sequence to Sequence模型进行训练。 7.根据权利要求6所述的问答对归纳方法,其特征在于,所述问答对生成方法可通过基于启发式规则实现,执行步骤进一步包括: 将训练用对话数据中问题语句和回复语句按照长度过滤,筛选出满足长度条件的对话语句; 按照位置顺序,分别判断每个回复语句在所述对话语句中是否位于两个问题语句之间,或者是否紧接最后一个问题语句且位于所述对话语句的结束句处,若是,寻找对应回复 2
BIM模型深度标准
BIM 模型深度标准 一、定义 模型的细致程度定义了一个BIM模型构件单元从最初级的概念化的程度发展到最高级的竣工级精度的步骤。 按照BIM模型的运行阶段不同,从概念设计到竣工设计共划分为五个阶段: 1.0 –等同于概念设计,此阶段的模型通常为表现建筑整体类型分析的建筑体量,分析包括体积,建筑朝向,每平方造价等。 2.0 –等同于方案设计,此阶段的模型包含普遍性系统包括大致的数量,大小,形状,位置以及方向。 3.0 –模型单元等同于传统施工图和深化施工图层次。 4.0 –此阶段的模型被认为可以用于模型单元的加工和安装。 5.0 –最终阶段的模型表现的项目竣工的情形。 模型深度按不同专业进行划分,包括建筑、结构、机电专业的模型深度。 模型深度应分为几何和非几何两个信息类型。 二、各专业模型深度标准 2.1建筑专业 建筑专业BIM模型深度等级应符合表2.1-1建筑专业几何信息深度等级表和表2.1-2 建筑专业非几何信息深度等级表的规定。 表 2.1-1 建筑专业几何信息深度等级表
表 2.1-2 建筑专业非几何信息深度等级表
2.2结构专业 结构专业BIM模型深度等级应符合表2.2-1结构专业几何信息深度等级表和表2.2-2 结构专业非几何信息深度等级表的规定。 表 2.2-1 结构专业几何信息深度等级表
表2.2-2 结构专业非几何信息深度等级表 2.3机电专业 机电专业BIM模型深度应符合表2.3-1 机电专业几何信息深度等级表和表
2.3-2 机电专业非几何信息深度等级表的规定。 表 2.3-1 机电专业几何信息深度等级表
卷积神经网络 论文版
卷积神经网络 摘要:卷积神经网络是近年来广泛应用于模式识别、图像处理等领域的一种高效识别算法,它具有结构简单、训练参数少和适应性强等特点。本文从卷积神经网络的发展历史开始,详细阐述了卷积神经网络的网络结构、神经元模型和训练算法。在此基础上以卷积神经网络在人脸检测和形状识别方面的应用为例,简单介绍了卷积神经网络在工程上的应用,并给出了设计思路和网络结构。 关键字:模型;结构;训练算法;人脸检测;形状识别 Convolution Neural Network Abstract:Convolution neural network is an efficient recognition algorithm which is widely used in pattern recognition, image processing and other fields recent years.It has a simple structure, few training parameters and good adaptability and other advantages. In this paper, begin with the history of convolutional neural networks,describes the structure of convolutional neural network,neuron models and training algorithms in detail. On this basis,uses the applications of convolutional neural network in face detection and shape recognition as examples, introduces the applications of convolution neural network in engineering, and gives design ideas and network structure. Keywords:Model; Training Algorithm; Advantage; Face detection; Shape recognition 0 引言 卷积神经网络是人工神经网络的一种已成为当前语音分析和图像识别领域的研究热点,它的权值共享网络结构使之更类似于生物神经网络,降低了网络模型的复杂度,减少了权值的数量。该优点在网络的输入是多维图像时表现的更为明显,使图像可以直接作为网络的输入,避免了传统识别算法中复杂的特征提取和数据重建过程。卷积网络是为识别二维形状而特殊设计的一个多层感知器,这种网络结构对平移、比例缩放、倾斜或者共他形式的变形具有高度不变性。 1 卷积神经网络的发展历史 1962年Hubel和Wiesel通过对猫视觉皮层细胞的研究,提出了感受野(receptive field)的概念,1984年日本学者Fukushima基于感受野概念提出的神经认知机(neocognitron)可以看作是卷积神经网络的第一个实现网络,也是感受野概念在人工神经网络领域的首次应用。神经认知机将一个视觉模式分解成许多子模式(特征),然后进入分层递阶式相连的特征平面进行处理,它试图将视觉系统模型化,使其能够在即使物体有位移或轻微变形的时候,也能完成识别。神经认知机能够利用位移恒定能力从激励模式中学习,并且可识别这些模式的变化形,在其后的应用研究中,Fukushima将神经认知机主要用于手写数字的识别。随后,国内外的研究人员提出多种卷积神经网络形式,在邮政编码识别和人脸识别方面得到了大规模的应用。 通常神经认知机包含两类神经元,即承担特征抽取的S-元和抗变形的C-元。S-元中涉及两个重要参数,即感受野与阈值参数,前者确定输入连接的数目,后者则控制对特征子模式的反应程度。许多学者一直致力于提高神经认知机的性能的研究:在传统的神经认知机中,每个S-元的感光区中由C-元带来的视觉模糊量呈正态分布。如果感光区的边缘所产生的模糊效果要比中央来得大,S-元将会接受这种非正态模糊所导致的更大的变形容忍性。我们希望得到的是,训练模式与变形刺激模式在感受野的边缘与其中心所产生的效果之间的差异变得越来越大。为了有效地形成这种非正态模糊,Fukushima提出了带双C-元层的改进型神经
万能角度尺原理及使用说明
万能角度尺原理及使用说明 万能角度尺 科技名词定义 中文名称: 万能角度尺 universal bevel protractor 英文名称: 定义: 用游标读数,可测任意角度的量尺。 。 国家标准: GB/T6315-2008游标、带表和数显万能角度尺 目录 简介...................................................................... . (1) 原理...................................................................... . (2) 结构说明...................................................................... (2) 万能角度尺的使用方 法 ..................................................................... (3)
万能角度尺的读数方 法 ..................................................................... (6) 简介 万能角度尺又被称为角度规、游标角度尺和万能量角器,它是利用游标读数原理来直接测量工件角或进行划线的一种角度量具。 适用于机械加工中的内、外角度测量,可测 0?-320? 外角及 40?-130? 内角。 原理 万能角度尺是用来测量工件内、外角度的量具,其结构如图所示。 万能角度尺的读数机构是根据游标原理制成的。主尺刻线每格为1?。游标的刻线是取主尺的29?等分为30格,因此游标刻线角格为29?/30,即主尺与游标一格的差值为,也就是说万能角度尺读数准确度为2’。其读数方法与游标卡尺完全相同。结构说明 测量时应先校准零位,万能角度尺的零位,是当角尺与直尺均装上,而角尺的底边及基尺与直尺无间隙接触,此时主尺与游标的“0”线对准。调整好零位后,通过改变基尺、角尺、直尺的相互位置可测试0,320?范围内的任意角。
深度游标卡尺使用说明书.
深度游标卡尺使用说明书 感谢您对我们的信任,欢迎您选用本公司的产品,本公司将热诚为您服务。为使您更方便、更快捷地使用本产品,请您在使用前认真阅读此说明书,并放于方便位置以备日后查阅。 深度游标卡尺是利用游标原理对深度进行测量的工具。 结构简图 基本参数: 测量范围mm 游标读数值
mm 量爪长(桥长 mm 型式 0 ~ 200 0.02,0.05100 普通、钩型、 针型 0 ~ 300 0.02,0.05100,125,150 普通、钩型 0 ~ 500 0.02,0.05150 普通、钩型 性能特点: * 采用不锈钢或优质碳素钢材料。 * 尺身刻线面无光泽镀铬,激光刻线。 几种不同款式及其应用: 1.普通直杆深度尺(如图2所示。
2.钩型深度尺可用来测量阶梯孔槽的深度和壁厚 (如图3所示。 3.针型深度尺主要用来测量小孔的深度(如图4 所示。 读数方法: 如图5所示,当尺身刻度值为1 mm,游 标读数值为0.02 mm时,如尺身读数是10 mm,游标读数是0.56 mm,测量结果就是: 10.56 mm 注意事项: * 使用前,松开尺框上紧固螺钉,并将尺框 平稳拉开,用布将测量面、导向面擦干净。 * 测量时,尺身与被测工件底面相垂直。 ?使用完毕,要把尺身退回原位,用紧固螺 钉固定住,擦净上油,放到卡尺盒内。 ?不要将卡尺放在磁性物体上。发现卡尺带有磁性,应及时退磁后方可使用。信誉卡(保修单 *本公司产品合格证即信誉卡,保修及服务内容请见信誉卡有关条目。
*本公司致力于追求完美无止境,实际产品和说明书可能略有不同,恕不另行通知,敬请见谅。 靖江量具有限公司
万能角度尺检定规程【详解】
万能角度尺检定规程(JJG33~2002) 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 万能角度尺操作规程: 1、目的:为了规范万能角度尺的操作,确保其操作的正确性。 2、范围:本规程适用于所有使用的游标万能角度尺。 3、使用操作 n使用前,先将万能角度尺擦拭干净,再检查各部件的相互作用是否移动平稳可靠、止动后的读数是否不动,然后对零位; n 测量时,放松制动器上的螺帽,移动主尺座作粗调整,再转动游标背面的手把作精细调整,直到使角度尺的两测量面与被测工件的工作面密切接触为止。然后拧紧制动器上的螺帽加以固定,即可进行读数; n 测量完毕后,应用汽油或酒精把万能角度尺洗净,用干净纱布仔细擦干,要是长期不用需涂以防锈油,然后装入匣内。 4、检定标准:根据国家万能角度尺计量检定规程JJG 33-2002检定。 万能角度尺校准规程: 1目的 :对游标万能角度进行内部校准,确保其准确度、精密度符合要求。
2适用范围 :适用于所有使用的游标万能角度尺。 3校验基准 :外校合格的量块。 4环境条件: 室温 5校准步骤 5.1检查游标万能角度尺主体及辅助尺有无变形,紧固螺丝是否松动,刻度是否清晰,扭动旋转螺丝刻度尺表盘是否平稳、平滑。 5.2取外校合格的80mm、100mm标准量块各一块将两块量块平放在台面,2个测量接触面垂直形成90°内、外角。 5.3将游标万能角度尺调至90°刻度,再贴紧量块的90°外角,扭动旋转螺丝使游标万能角度尺的两个测量面与量块的90°外角充分接触至无任何缝隙,记录表盘读数再重复两次测量。将测量三次的平均值记录在《检测设备校验记录表》内。 5.4按以上动作重复测试量块的90°内角。 5.5每次测量精度允许误差在±2’内判定合格。 6校准周期 :每年校准一次。 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.
单目深度估计文献翻译unsupervised monocular depth estimation with left-right consistency
左右(视差)一致的非监督式单目深度估计 摘要 以学习为基础的方法已经在对单张图片的深度估计上取得了可观的结果。大多数现有的方法是将深度预测作为监督式的回归问题来处理,然而这种方式需要大量相应的真实深度数据用于训练。然而,单单从复杂环境中获取高质量的深度数据就已经很有难度了。我们将在本文中对已有方式进行创新,不再对深度数据进行训练,而是训练更容易获得的双目立体连续镜头。 我们提出了一种新颖的训练目标,即使在缺少真实深度数据的情况下,仍然能够使用卷积神经网络来完成单张图片的深度估计。利用极线几何限制,我们通过训练有图像重构损失函数的网络生成了视差图像。我们曾发现单独进行图像重构会导致深度图像质量很差。为了解决这个问题,我们提出了一个新颖的训练损失函数,可以使左右图像产生的视差趋于一致,以此来提高当前方式的表现和健壮度。我们的方法在KITTI 驾驶数据集上展示出艺术般的单目深度估计效果,甚至优于基于真实深度数据的监督式学习的效果。 1.简介 在计算机视觉领域,对图片进行深度估计已经有了很久的历史。目前的成熟方式依赖于连续动作、X 射线下的形状、双目和多视角立体模型。然而,多数的上述技术是基于可获取相关场景的观测数据的假设。其中,数据可能是多角度的,或者观测是在不同的光线环境下进行的。为了突破这个限制,近期涌现出大量在监督式学习下对单目深度识别的讨论。这些方法试图直接在线下通过大量真实深度数据训练的模型来对图像中的每一个像素进行深度估计。这些方法虽然已经取得巨大的成功,但是是建立在可获取大量图像数据集和相应的像素深度的情况下的。 在单张图像里获取不受外表干扰的场景形状是机器感知的基础问题。很多此类的应用,比如在计算机图形学中合成对象的插入、在计算机摄影学中对深度的合成、机器人抓握,会使用深度为线索进行人体姿
基于深度学习的创意三维体素模型的建模系统的构建方法与制作流程
本技术涉及三维体素模型的建模领域,其公开了一种基于深度学习的创意三维体素模型的建模系统的构建方法,构建一种可自动生成具有创意性的三维体素模型,同时具有可交互编辑功能的建模系统。该方法包括:A、制作三维模型的体素数据集以及组成三维模型的语义部件数据集;B、搭建三维模型的生成模型以及三维模型组成部件的生成模型,并采用体素数据集和语义部件数据集分别进行训练;C、基于训练后的三维模型的生成模型中的编码器和训练后的三维模型组成部件的生成模型中的编码器构建语义结构模型,并进行训练;D、将训练后的语义结构模型整合入系统中作为建模算法,同时为用户提供交互界面以及针对生成的三维模型组件的可控编辑接口。 权利要求书 1.基于深度学习的创意三维体素模型的建模系统的构建方法,其特征在于, 包括以下步骤: A、制作三维模型的体素数据集以及组成三维模型的语义部件数据集; B、搭建三维模型的生成模型以及三维模型组成部件的生成模型,并采用体素数据集和语义部件数据集分别进行训练;
C、基于训练后的三维模型的生成模型中的编码器和训练后的三维模型组成部件的生成模型中的编码器构建语义结构模型,并进行训练; D、将训练后的语义结构模型整合入系统中作为建模算法,同时为用户提供交互界面以及针对生成的三维模型组件的可控编辑接口。 2.如权利要求1所述的基于深度学习的创意三维体素模型的建模系统的构建方法,其特征在于, 步骤A中,基于已知数据集ShapeNetCore,并进行人工的分类和对齐来制作三维模型的体素数据集;然后利用MeshLab软件对ShapeNetCore数据集提供的三维模型的部件根据语义结构进行分割和分类,以此制作组成三维模型的语义部件数据集。 3.如权利要求1所述的基于深度学习的创意三维体素模型的建模系统的构建方法,其特征在于, 步骤B中,采用整体变分自编码器作为三维模型的生成模型,采用部件变分自编码器作为三维模型组成部件的生成模型;采用KL散度和二进制交叉熵作为损失函数,利用体素数据集中的数据训练所述整体变分自编码器;采用KL散度和二进制交叉熵作为损失函数,利用三维模型的语义部件数据集中的数据训练所述部件变分自编码器。 4.如权利要求3所述的基于深度学习的创意三维体素模型的建模系统的构建方法,其特征在于, 所述整体变分自编码器和部件变分自编码器均采用编码器-解码器的结构,编码器和解码器均由深度卷积神经网络组成;其中,部件变分自编码器采用的卷积层数少于整体变分自 编码器采用的卷积层数。 5.如权利要求1所述的基于深度学习的创意三维体素模型的建模系统的构建方法,其特征在于,
建筑专业BIM建模规范 2015-6-4
编写依据: 设计企业BIM实施标准指南 建筑工程设计信息模型应用统一标准 建筑工程设计信息模型交付标准 建筑工程设信息模型分类和编码标准 北京市地方标准《民用建筑信息模型(BIM)设计基础标准》 中色科技股份有限公司建筑工程设计信息模型交付标准 设计院BIM建模标准 中南集团BIM课题组——协调建模工作标准 建筑专业BIM建模规范 一、建模方法 1.建模总则 1.1.模型拆分原则 1.1.1. 按建筑分区 1.2.1. 按楼号 1.3.1. 按施工缝 1.4.1. 按单个楼层或一组楼层 1.5.1. 按建筑构件,如外墙、屋顶、楼梯、楼板 1.2.文件命名规则 1.2.1.在服务器\\192.1.6.77中由管理员建立子项目名称文件夹(依据计划表的子项目名称来建),设计人员在子项目名称文件夹中建立项
目名称,若一个子项中含有多个分子项,可以在“建筑专业中心文件”夹中并列建立另一个分子项文件。 如\\192.1.6.77(服务器)重庆汇程铸锭铣床(子项名称文件夹)建筑专业中心文件锯切机铣床控制室/破碎机隔音罩(另一个分子项)。 1.2.2.原点文件夹与此命名相同。 1.2.3.存到本机上的文件命名规则是在分子项名称后加“本地”两字。 如锯切机铣床控制室(本地) 1.3.模型定位基点设置规则 以项目基点作为纵横轴的左下角交点,其目的便于各专业的链接时自动原点对原点,及碰撞检查的需要,建立轴网后再隐藏项目基点。 1.4.轴网与标高定位基础规则 1.4.1.使用相对标高,±0.000即为坐标原点Z轴坐标点;建 筑、结构、电气和公用专业使用自己相应的相对标高。 1.4.2.建筑专业建立原点文件(包含轴网和标高),上传到服务器。 结构、电气和公用专业复制监视建筑原点文件,步骤如下:第一步:插入——链接REVIT——打开“服务器文件夹中的原点文件”定位选择“自动原点到原点” 第二步:协作——复制/监视——复制——选择链接“ ——再次点击“完成” 第三步:插入——管理链接——卸载原点文件 1.5.工作集划分规则 1.5.1.利用协作——工作集工具,为项目新建工作集,命名为“混
深度游标卡尺使用方法
深度游标卡尺使用方法
深度游标卡尺 深度游标卡尺用于测量凹槽或孔的深度、梯形工件的梯层高度、长度等尺寸,平常被简称为“深度尺”。是一种用游标读数的深度量尺。 深度游标卡尺使用注意事项 深度游标卡尺是比较精密的量具,使用是否合理,不但影响深度游标卡尺本身的精度和使用寿命,而且对测量结果的准确性,也有直接影响。必须正确使用深度游标卡尺。 1.使用前,认真学习并熟练掌握深度游标卡尺的测量、读数方法。 2.搞清楚所用深度游标卡尺的量程、精度是否符合被测零件的要求。 3.使用前,检查深度游标卡尺应完整无任何损伤,移动尺框3时,活动要自如 不应有过松或过紧,更不能有晃动现象。 4.使用前,用纱布将深度游标卡尺擦拭干净,检查尺身4和游标5的刻线是否 清晰,尺身有无弯曲变形、锈蚀等现象。校验零位、检查各部分作用是否正常。 5.使用深度游标卡尺时,要轻拿轻放,不得碰撞或跌落地下。使用时不要用来 测量粗糙的物体,以免过早损坏测量面。 6.移动卡尺的尺框和微动装置时,不要忘记松开紧固螺钉4;但也不要松得过 量,以免螺钉脱落丢失。 7.测量前,应将被测量表面擦干净,以免灰尘、杂质磨损量具。 8.卡尺的测量基座和尺身端面应垂直于被测表面并贴合紧密,不得歪斜,否则 会造成测量结果不准。 9.应在足够的光线下读数,两眼的视线与卡尺的刻线表面垂直,以减小读数误 差。 10.在机床上测量零件时,要等零件完全停稳后进行,否则不但使量具的测量面 过早磨损而失去精度,且会造成事故。 11.测量沟槽深度或当其他基准面是曲线时,测量基座的端面必须放在曲线的 最高点上,测量出的深度尺寸才是工件的实际尺寸,否则会出现测量误差。
万能角度尺使用说明
万能角度尺使用说明书 万能角度尺是用来测量精密零件内外角度或进行角度划线的角度量具。 万能角度尺的读数机构,如图所示。是由刻有基本角度刻线的主尺,和固定在扇形板上的游标组成。扇形板可在主尺上回转移动(有制动器),形成了和游标卡尺相似的游标读数机构。万能角度尺的精度为2′ Ⅰ型万能角度尺的结构 Ⅱ型万能角度尺的结构
万能角度尺的读数及使用方法 测量时,根据产品被测部位的情况,先调整好角尺或直尺的位置,用卡块上的螺钉把它们 紧固住,再来调整基尺测量面与其它有关测量面之间的夹角。这时,要先松开制动头上的螺母,移动主尺作粗调整,然后再转动扇形板背面的微动装置作细调整,直到两个测量面与被测表面 密切贴合为止。然后拧紧制动器上的螺母,把角度尺取下来进行读数。 (1)测量0°-50°之间角度 角尺和直尺全都装上,产品的被测部位放在基尺各直尺的测量面之间进行测量。 (2)测量50°-140°之间角度 可把角尺卸掉,把直尺装上去,使它与扇形板连在一起。工件的被测部位放在基尺和直尺的测量面之间进行测量。
也可以不拆下角尺,只把直尺和卡块卸掉,再把角尺拉到下边来,直到角尺短边与长边的交线和基尺的尖棱对齐为止。把工件的被测部位放在基尺和角尺短边的测量面之间进行测量。 (3)测量140°-230°之间角度
把直尺和卡块卸掉,只装角尺,但要把角尺推上去,直到角尺短边与长边的交线和基尺的尖棱对齐为止。把工件的被测部位放在基尺和角尺短边的测量面之间进行测量。 4)测量230°-320°之间角度(即40°-130°的内角) 把角尺、直尺和卡块全部卸掉,只留下扇形板和主尺(带基尺)。把产品的被测部位放在基尺和扇形板测量面之间进行测量。