MATLAB水准网间接平差课程作业程序
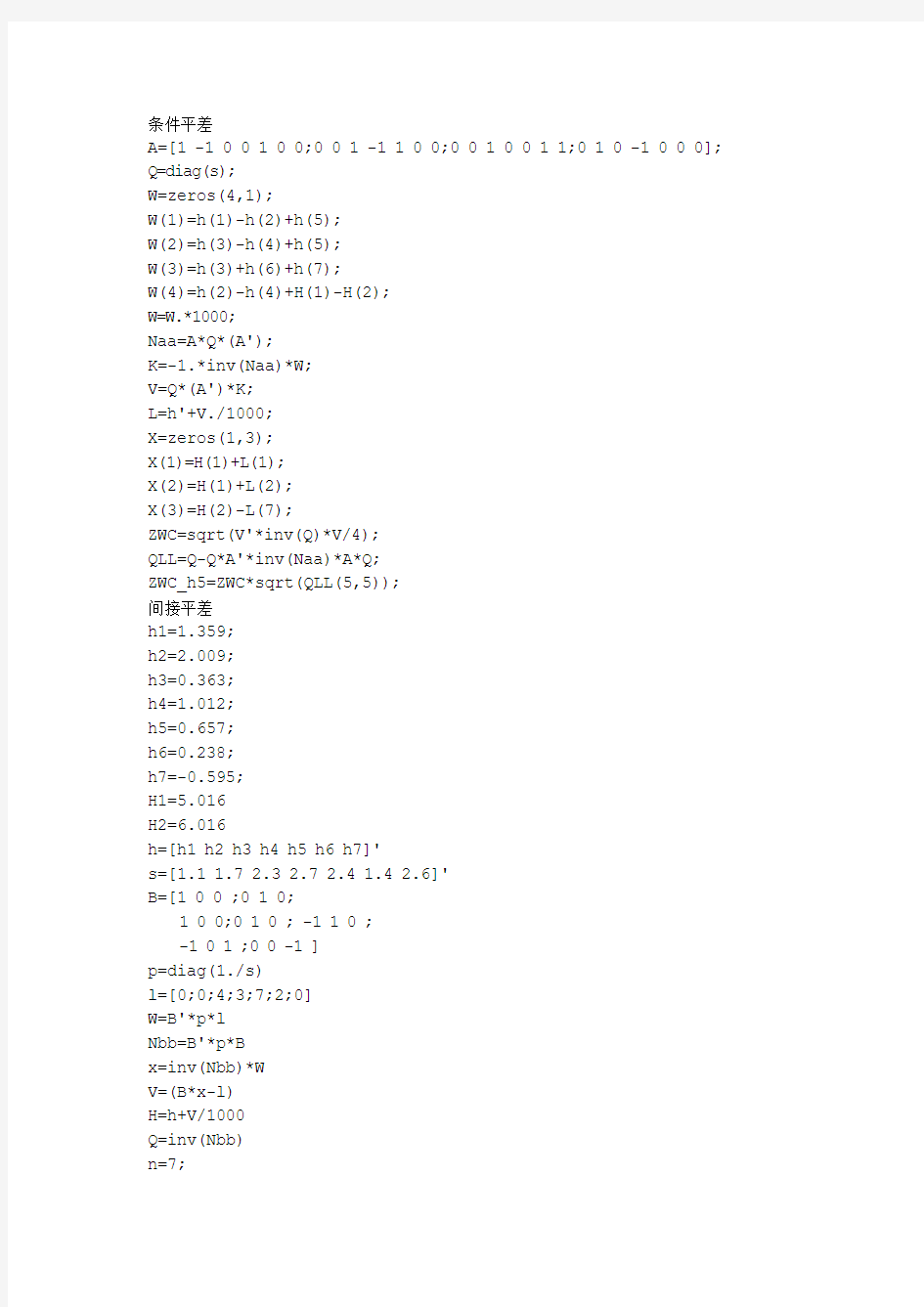

条件平差
A=[1 -1 0 0 1 0 0;0 0 1 -1 1 0 0;0 0 1 0 0 1 1;0 1 0 -1 0 0 0]; Q=diag(s);
W=zeros(4,1);
W(1)=h(1)-h(2)+h(5);
W(2)=h(3)-h(4)+h(5);
W(3)=h(3)+h(6)+h(7);
W(4)=h(2)-h(4)+H(1)-H(2);
W=W.*1000;
Naa=A*Q*(A');
K=-1.*inv(Naa)*W;
V=Q*(A')*K;
L=h'+V./1000;
X=zeros(1,3);
X(1)=H(1)+L(1);
X(2)=H(1)+L(2);
X(3)=H(2)-L(7);
ZWC=sqrt(V'*inv(Q)*V/4);
QLL=Q-Q*A'*inv(Naa)*A*Q;
ZWC_h5=ZWC*sqrt(QLL(5,5));
间接平差
h1=1.359;
h2=2.009;
h3=0.363;
h4=1.012;
h5=0.657;
h6=0.238;
h7=-0.595;
H1=5.016
H2=6.016
h=[h1 h2 h3 h4 h5 h6 h7]'
s=[1.1 1.7 2.3 2.7 2.4 1.4 2.6]'
B=[1 0 0 ;0 1 0;
1 0 0;0 1 0 ; -1 1 0 ;
-1 0 1 ;0 0 -1 ]
p=diag(1./s)
l=[0;0;4;3;7;2;0]
W=B'*p*l
Nbb=B'*p*B
x=inv(Nbb)*W
V=(B*x-l)
H=h+V/1000
Q=inv(Nbb)
n=7;
t=3;
j=V'*p*V
d= sqrt(j/4)
f=[-1 1 0]'
q=f'*Q*f
D=d*sqrt(q)
D1=d*sqrt(Q)
disp('观测值,单位m')
h1=1.359;
h2=2.009;
h3=0.363;
h4=1.012;
h5=0.657;
h6=0.238;
h7=-0.595;
H1=5.016; % 已知点高程,单位m
H2=6.016 % 已知点高程,单位m
h=[h1 h2 h3 h4 h5 h6 h7]'
s=[1.1 1.7 2.3 2.7 2.4 1.4 2.6]' % S是线路长度disp('系数矩阵B、l')
B=[1 0 0 ;0 1 0;
1 0 0;0 1 0 ; -1 1 0 ;
-1 0 1 ;0 0 -1 ]
p=diag(1./s) %定义权阵
l=[0;0;4;3;7;2;0]
W=B'*p*l
Nbb=B'*p*B
disp('参数的解')
x=inv(Nbb)*W;
V=(B*x-l) % 误差方程(mm)
H=h+V/1000 % 观测值的平差值
Q=inv(Nbb); %观测值协因数阵
j=V'*p*V ; %计算单位权中误差的参数
d= sqrt(j/4); %单位权中误差
f=[-1 1 0]' ; %权函数系数阵
q=f'*Q*f; %权函数协因数阵
disp('输出结果')
H=h+V/1000
D=d*sqrt(q)
Dc=d*sqrt(Q(1,1))
Dd=d*sqrt(Q(2,2))
水准网按条件平差算例
在图 表9-1 试求: (1)1P 、2P 及3P 点高程之最或然值; (2)1P 、2P 点间平差后高差的中误差。 解:(1)列条件方程式,不符值以“mm ”为单位。 已知3,7==t n ,故437=-=r ,其条件方程式为 ??? ? ???=--+=-+--=-+--=++-01030707742643765521v v v v v v v v v v v v (2)列函数式: 555v h x F +== 故 15=f 0764321======f f f f f f (3)组成法方程式。 1)令每公里观测高差的权为1,按1/i i s p =,将条件方程系数及其与权倒数之乘积填于表9-2中。 2)由表9-2数字计算法方程系数,并组成法方程式:
????????????----------5221251021411013????????????d c b a k k k k +????? ???????---1377=0 表9-2 条件方程系数表 (4)法方程式的解算。 1)解算法方程式在表9-3中进行。 2)[]pvv 计算之检核。 [][]wk pvv -= []467.35=-wk 由表9-3中解得[]47.35-=pvv ,两者完全一致,证明表中解算无误。 (5)计算观测值改正数及平差值见表9-4。 (6)计算321,,P P P 点高程最或然值。 359.3611=+=x H H A P m 012.3722=+=x H H A P m
表9-4 改正数与平差值计算表 (7)精度评定。 1)单位权(每公里观测高差)中误差 2)21,P P 点间平差后高差中误差 mm 0.34 47.35±=±=μmm P m F F 2.252.00.31 ±=±=±=μ
平差易软件数据输入实例
导线实例 这就是一条符合导线的测量数据与简图,A、B、C与D就是已知坐标点,2、3与4就是待测的控制点。 测站点角度(°′″) 距离(米) X (米) Y(米) B 8345、8709 5216、6021 A 85、30211 1474、4440 7396、2520 5530、0090 2 254、32322 1424、7170 3 131、04333 1749、3220 4 272、20202 1950、4120 C 244、18300 4817、6050 9341、4820 D 4467、5243 8404、7624 导线原始数据表 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3与4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。 如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示: 测站A的观测信息 以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示: 测站C的观测信息 2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示: 测站2的观测信息 以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示: 测站3的观测信息 以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
测绘程序设计实验八水准网平差程序设计报告完整版
测绘程序设计实验八水准网平差程序设计报告 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
《测绘程序设计》上机实验报告 (Visual C++.Net) 班级:测绘0901班 学号: 04 姓名:代娅琴 2012年4月29日
实验八平差程序设计基础 一、实验目的 巩固过程的定义与调用 巩固类的创建与使用 巩固间接平差模型及平差计算 掌握平差程序设计的基本技巧与步骤 二、实验内容 水准网平差程序设计。设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。 1.水准网间接平差模型: 2.计算示例:
近似高程计算: 3.水准网平差计算一般步骤 (1)读取观测数据和已知数据; (2)计算未知点高程近似值; (3)列高差观测值误差方程; (4)根据水准路线长度计算高差观测值的权; (5)组成法方程; (6)解法方程,求得未知点高程改正数及平差后高程值; (7)求高差观测值残差及平差后高差观测值; (8)精度评定; (9)输出平差结果。 4.水准网高程近似值计算算法
5.输入数据格式示例 实验代码: #pragma once class LevelControlPoint { public: LevelControlPoint(void); ~LevelControlPoint(void);
public: CString strName;trName=pstrData[0]; m_pKnownPoint[i].strID=pstrData[0]; m_pKnownPoint[i].H=_tstof(pstrData[1]); m_pKnownPoint[i].flag=1;trName=pstrData[i]; m_pUnknownPoint[i].strID=pstrData[i]; m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=Sea rchPointUsingID(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID) {return &m_pKnownPoint[i];} } return NULL; } trID==ID) {return &m_pUnknownPoint[i];} } return NULL; } LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID) { LevelControlPoint* cp; cp=SearchKnownPointUsingID(ID); if(cp==NULL) cp=SearchUnknownPointUsingID(ID); return cp; } void AdjustLevel::ApproHeignt(void)lag!=1) { pFrontObj->strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpBackObj->flag==1 ) { =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/ m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue; m_pUnknownPoint[i].flag=1; break; } } if(m_pUnknownPoint[i].flag!=1)pBackObj- >strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpFrontObj->flag==1 ) { =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;
水准网的条件平差
目录 目录 (1) 观测误差 (2) 摘要: (2) 关键词: (2) 引言 (3) 1水准测量 (4) 1.1水准测量的原理 (4) 1.2水准网 (5) 2条件平差 (6) 2.1衡量精度的指标 (6) 2.2条件平差的原理 (8) 3水准网的平差 (14) 3.1必要观测与多余观测 (14) 3.2条件方程 (14) 3.3条件平差法方程式 (14) 3.4条件平差的精度评定 (15) 3.5水准网的条件平差 (18) 致谢 (20) 参考文献 (21)
观测误差 —由观测者、外界环境引起的偶然误差 学生: xxx 指导教师:xxx 摘要: 对一系列带有偶然误差的观测值,采用合理的的方法消除它们间的不符值,得出未知量的最可靠值;以及评定测量成果的精度。 关键词: 偶然误差;观测值;精度
引言 测量工作中,要确定地面点的空间位置,就必须进行高程测量,确定地面点的高程。几何水准测量是高程测量中最基本、最精密的一种方法。通过测量仪器,工具等任何手段获得的以数字形式表示的空间信息,即观测量。然而,测量是一个有变化的过程,受仪器、观测值、外界环境因素的影响,观测的结果与客观上存在的一个能反映其真正大小的数值,即真值(理论值),有一定的差异。可以说在测量中产生误差是不可避免的。所以,观测值不能准确得到,在测量上称这种差异为观测误差。根据其对观测结果影响的性质,可将误差分为系统误差和偶然误差两种。前者可以通过在观测过程中采取一定的措施和在观测结果中加入改正数,消除或减弱它的影响,使其达到忽略不计的程度。但是,观测结果中,不可避免地包含了后者,它是不可消除的,但可以选择较好的观测条件或采用适当的数据处理方法减弱它。现在我们要讨论的就是采用适当的数据处理方法来减弱其对水准测量中的影响。
平差易软件数据输入实例
导线实例 这是一条符合导线的测量数据和简图,A、B、 C 和 D 是已知坐标点,2、3 和 4 是待测的控制点。 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D 为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4 点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D 作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A 的观测信息”所示: A 的观测信息 以C 为测站点,以4 号点为定向点时,照准D 点的数据输入如下图“测站C 的观测信息”所示: C 2 2 以3 号点为测站点,以2 号点为定向点时,照准4 号点的数据输入如下图“测站3 的观测信息”所示: 3 以4 号点为测站点,以3 号点为定向点时,照准C 点的数据输入如下图“测站4 的观测信息”所示:
测站 4 的观测信息 说明:①数据为空或前面已输入过时可以不输入(对向观测例外) ②在电子表格中输入数据时,所有零值可以省略不输。 以上数据输入完后,点击菜单“文件另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A ): [STATION] (测站信息) B,10,8345.870900,5216.602100 A,10,7396.252000,5530.009000 C, 10,4817.605000,9341.482000 D, 10,4467.524300,8404.762400 2,00 3,00 4,00 [OBSER] (观测信息) A,B,,1000.0000 A,2,85.302110,1474.4440 C,4 C,D,244.183000,1000.0000 2,A 2,3,254.323220,1424.7170 3,2 3,4,131.043330,1749.3220 4,3 4,C,272.202020,1950.4120 上面[STATION] (测站点)是测站信息区中的数据,[OBSER] (照准点)是观测信息区中的数据。 水准实例 这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的
水准网平差c++代码
水准网平差 结果 #include (误差理论与测量平差础) 课程设计报告 系(部):土木工程系 实习单位:山东交通学院 班级:测绘084 学生姓名:田忠星学号0 带队教师:夏小裕﹑周宝兴 时间:10 年12 月13日到10 年12 月19日 山东交通学院 目录: 1.摘要P3 2.概述P3 3.水准网间接平差程序设计思路P3—P4 4. 平差程序流程图P4—P6 5. 程序源代码及说明P7—P23 6. 计算结果P23—P26 7. 总结P26—P27 一:摘要 在测量工作中,为了能及时发现错误和提高测量成果的精度,常作多余观测,这就产生了平差问题。在一个平差问题中,当所选的独立参数X?的个数等于必要观测数t时,可将每个观测值表达成这t个参数的函数,组成观测方程,这种以观测方程为函数模型的平差方法,就是间接平差。 二:概述: 该课程设计的主要目是对水准网进行间接平差,在输入数据后依次计算高程近似值﹑误差方程和平差计算。 三:水准网间接平差程序设计思路 1.根据平差问题的性质,选择t 个独立量(既未知点的高程) 作为参数X ? 2. 将每一个观测量的平差值(既观测的高程差值)分别表达成 3.由误差方程系数B 和自由项组成法方程,法方程个数等于参数的个数t ; 4. 解算法方程,求出参数X ?,计算参数(高程)的平差值 X ?=X 0 +x ? ; 5.由误差方程计算V ,求出观测量(高差)平差值 6.评定精度 单位权中误差 平差值函数的中误差 四:平差程序流程图 1. 已知数据的输入 需要输入的数据包括水准网中已知点数﹑未知点数以及这些点的点号,已知高程和高差观测值﹑距离观测值。程序采用文件方式进行输入,约定文件输入的格式如下: 第一行:已知点数﹑未知点数﹑观测值个数 第二行:点号(已知点在前,未知点在后) V L L +=∧ 《测量平差课程设计》 设计报告 设计名称:测量平差课程设计 学院名称:矿业工程学院 专业班级:测绘12-2 学生姓名:雷蕾 学号: 2012020782 指导教师:张红华 测绘工程教研室 2014年8月 一.课程设计的目的 《测量平差》是一门理论与实践并重的课程,测量平差课程设计是测量数据处理理论学习的一个重要实践环节,是在学生学习了专业基础理论课《误差理论与测量平差基础》课程后进行的一门实践课程,其目的是增强学生对测量平差基础理论的理解,牢固掌握测量平差的基本原理和公式,熟悉测量数据处理的基本原理和方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机基础知识,编制简单的计算程序。 二.课程设计题目内容描述和要求 1.设计的任务 (1)该课的课程设计安排在理论学习结束之后进行的,主要是平面控制网和高程控制网严密平差,时间为一周。 (2)通过课程设计,培养学生运用本课程基本理论知识和技能,分析和解决本课程范围内的实际工程问题的能力,加深对课程理论的理解与应用。 (3)在指导老师的指导下,要求每个学生独立完成本课程设计的全部内容。 2.课程设计要求 2.1基本要求: 测量平差课程设计要求每一个学生必须遵守课程设计的具体项目的要求,独立完成设计内容,并上交设计报告。在学习知识、培养能力的过程中,树立严谨、求实、勤奋、进取的良好学风。 课程设计前学生应认真复习教材有关内容和《测量平差》课程设计指导书,务必弄清基本概念和本次课程设计的目的、要求及应注意的事项,以保证保质保量的按时完成设计任务。 2.2具体设计项目内容及要求: 2.2.1高程控制网严密平差及精度评定 总体思路:现有等级水准网的全部观测数据及网型、起算数据。要求对该水准网,分别用条件、间接两种方法进行严密平差,并检验。进行平差模型的正确性 水准网的条件平差: ①列条件平差值方程、改正数条件方程、法方程; //////////////////////////////////////////////////// // visual C++6.0 编译通过// //////////////////////////////////////////////////// /////////////////////////////////////////////////// // 参考资料// // 部分网络资料// // 宋力杰《测量平差程序设计》// //姚连壁《基于matlab的控制网平差程序设计》// /////////////////////////////////////////////////// #include 测量平差基础 实验报告(三) 水准网的条件平差 班级 学号 姓名 实验三水准网的间接平差 一、实验原理 输入矩阵元素—组成法方程—法方程解算—未知数平差值计算—精度计算。 二、实验目的 通过实例水准网间接平差计算,理解水准网间接平差原理,掌握其应用方法,能应用平差软件计算一个实际水准网。 三、主要仪器及耗材 计算机和相应平差软件及打印纸。 四、实验内容和步骤 根据给定的水准网列出误差方程式并完成相应的间接平差计算。 五、实验地点 建测楼测绘机房409 步骤:(1)确定未知数及其个数,列出误差方程,确定观测值权阵,权函数式; (2)输入误差系数阵、自由项矩阵、观测值权阵和未知数近似值阵的元素; (3)根据观测值的平差值进行验证。 间接平差计算质量报告观测值个数n: 8 未知数个数t: 3 多余观测r: 5 已知计算数据一: 已知矩阵B: 1 0 0 -1 0 0 0 0 1 0 0 -1 0 1 0 -1 1 0 0 1 0 0 1 -1 已知矩阵l: -0.006 -0.003 0.003 -0.008 -0.005 已知矩阵P: 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 已知矩阵X0: 11.425 10.36 12.521 已知矩阵L: 1.251 0.852 0.235 -2.311 0.15 -1.062 -1.931 -2.166 全部计算结果: 得到矩阵B的转置 1 -1 0 0 0 -1 0 0 0 0 0 0 1 1 1 1 0 0 1 -1 0 0 0 -1 得到矩阵Nb 《测绘程序设计(https://www.360docs.net/doc/542510945.html,)》 上机实验报告 (Visual C++.Net) 班级:测绘0901班 学号: 0405090204 姓名:代娅琴 2012年4月29日 实验八平差程序设计基础 一、实验目的 ?巩固过程的定义与调用 ?巩固类的创建与使用 ?巩固间接平差模型及平差计算 ?掌握平差程序设计的基本技巧与步骤 二、实验内容 水准网平差程序设计。设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。 1.水准网间接平差模型: 2.计算示例: 近似高程计算: 3.水准网平差计算一般步骤 (1)读取观测数据和已知数据; (2)计算未知点高程近似值; (3)列高差观测值误差方程; (4)根据水准路线长度计算高差观测值的权; (5)组成法方程; (6)解法方程,求得未知点高程改正数及平差后高程值; (7)求高差观测值残差及平差后高差观测值; (8)精度评定; (9)输出平差结果。 4.水准网高程近似值计算算法 5.输入数据格式示例 实验代码: #pragma once class LevelControlPoint { public: LevelControlPoint(void); ~LevelControlPoint(void); public: CString strName;//点名 CString strID;//点号 float H; bool flag;//标记是否已经计算出近似高程值,若计算出则为,否则为}; class CDhObs { public: CDhObs(void); ~CDhObs(void); public: LevelControlPoint* cpBackObj;//后视点 LevelControlPoint* cpFrontObj;//前视点 double ObsValue;//高差值 double Dist;//测站的距离 }; #include"StdAfx.h" #include"LevelControlPoint.h" LevelControlPoint::LevelControlPoint(void) { strName=_T(""); strID=_T(""); H=0; flag=0; } LevelControlPoint::~LevelControlPoint(void) { } CDhObs::CDhObs(void) { } CDhObs::~CDhObs(void) { } #pragma once #include"LevelControlPoint.h" #include"Matrix.h" class AdjustLevel { public: AdjustLevel(void); ~AdjustLevel(void); public: LevelControlPoint* m_pKnownPoint;//已知点数组 int m_iKnownPointCount;//已知点个数 7 单结点水准网平差 #include function tiaojian %条件方程的组成 A=[1 -1 0 0 1 0 0;0 0 1 -1 1 0 0;0 0 1 0 0 1 1;0 1 0 -1 0 0 0]; W=[7 8 6 -3]'; %协因数阵的组成 Q=diag([1.1 1.7 2.3 2.7 2.4 1.4 2.6]); P=inv(Q); %法方程组成 Naa=A*Q*A'; %求解联系数K和改正数 K=-inv(Naa)*W; V=Q*A'*K; %计算观测值的平差值 h=[1.359 2.009 0.363 1.012 0.657 0.238 -0.595]'; adjh=h+V/1000; %精度评定 VTPV=V'*P*V; r=4; var0=sqrt(VTPV/r);%计算单位权方差 %评定观测值平差值函数的精度 fs=[0 0 0 0 1 0 0]';%函数的系数 Qss=fs'*Q*fs-(A*Q*fs)'*inv(Naa)*A*Q*fs;%观测值平差值函数的协因数varS=Qss*var0;%观测值平差值函数的方差 %写输出结果文件 fid=fopen('C:\Documents and Settings\陈岑\桌面\tiaojian.dat','w+'); fprintf(fid,'%s\n\n ',' ######水准网平差算例######'); fprintf(fid,'%s ','观测值改正数');fprintf(fid,'\n'); for i=1:7 fprintf(fid,' %s%1.0f ','V',i); fprintf(fid,'%15.3f\n',V(i)); end fprintf(fid,'\n'); fprintf(fid,'%s\n','观测值平差值'); for i=1:7 fprintf(fid,' %s%1.0f ','h',i); fprintf(fid,'%15.3f',h(i)); fprintf(fid,'\n'); end fprintf(fid,'\n'); 水准平差实例 实例1 符合水准路线平差(单一水准路线) 实例2 三角高程平差 实例3 水准网平差(多条水准路线) 实例1、符合水准路线平差 这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。 测站点高差(米) 距离(米)高程(米) A -50.440 1474.4440 96.0620 2 3.252 1424.7170 3 -0.908 1749.3220 4 40.218 1950.4120 B 88.1830 水准原始数据表 水准路线图(模拟) 图中h为高差。 在平差易中输入以上数据,如下图“水准数据输入”所示: 水准数据输入 在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。因为没有平面坐标数据,故在平差易软件中没有网图显示。 根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示: 选择格式 注意: 1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。 “一般水准”所需要输入的观测数据为:观测边长和高差。 “三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。 2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。 在观测信息区中输入每一组水准观测数据 测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示: A->2观测数据 测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:水准网平差(VB代码)
平差课程设计水准网,导线网解算解读
水准网间接平差程序设计(C++)
水准网的间接平差
测绘程序设计—实验八 水准网平差程序设计报告
单结点水准网平差
水准网平差实例
南方平差易水准网平差实例.