第三章思考题与习题解析
第三章思考题与习题
3.1 工业控制计算机有什么主要特点?有哪几种主要类型?
答:工业控制计算机简称工控机,是为满足工业生产过程的数据采集、监测与控制等要求而设计的一类计算机的总称,它通常采用开放式总线结构,将各种过程通道做成相应的模板或模块,以便与工业现场的各种传感器及执行机构直接连接,并配有功能齐全的控制软件。目前,工业控制计算机不但用于工业生产的过程控制,而且也直接参与生产调度管理,从而使工业自动化在就地控制、集中控制的基础上,向综合自动化方向发展。
它与通用计算机相比有许多不同点,其主要特点有:
(1)可靠性高工业生产过程大部分是连续不间断的,在运行期间不允许停机检修,一旦发生故障将导致质量事故甚至是生产事故。因此,它要求故障率低、维修时间短,可靠性高。(2)实时性好工业控制计算机主要用于实时控制与检测,它必须满足实时性。
(3)环境适应能力强工业现场环境恶劣、电磁干扰严重等,这要求它具备抗电磁干扰、防振、防潮、耐高温等性能,可实现各种恶劣环境下控制系统的可靠运行。
(4)输入和输出模板配套好工业控制计算机应具有良好的过程通道,以满足生产控制要求。
(5)系统通信功能强工业控制计算机应具有较好的串行通信和网络功能,以构成较大的计算机控制下图,如现场总线控制系统、DCS分布控制系统、CIMS综合自动化系统等等。(6)系统开放性和扩充性好要求系统在软件和硬件上具有开放性,以便于系统扩充、异种机连接、软件升级、移植和互换等。
(7)控制软件包功能强以适应生产过程控制的各种要求。
(8)后备措施齐全和具有冗余性应具备系统冗余或双机工作等方式,以满足生产实际要求。
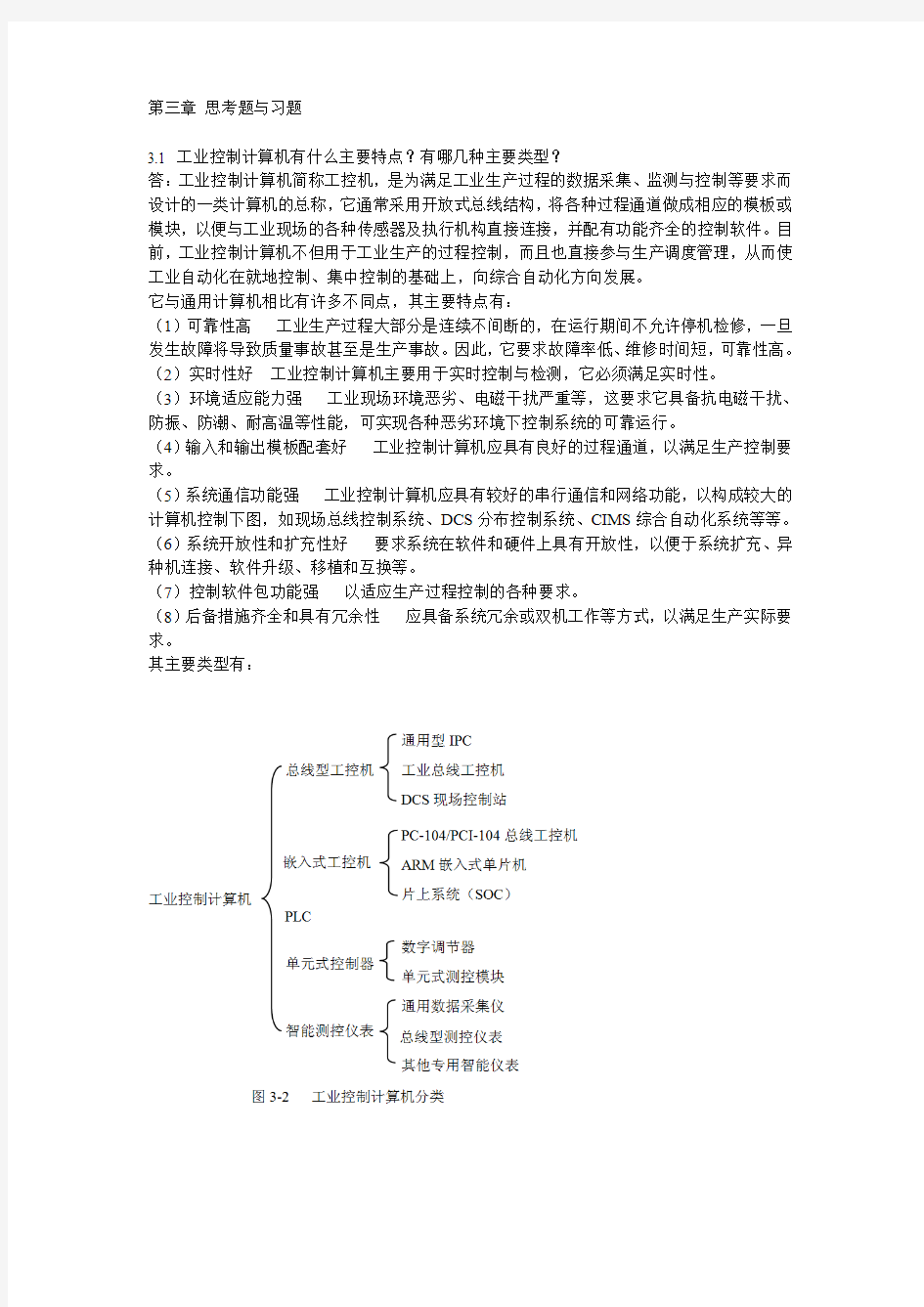
其主要类型有:
3.2 何为总线?何为总线标准?
答:总线是连接一个或多个部件的一组电缆的总称,通常包括地址总线、数据总线和控制总线。总线的特点在于公用性和兼容性,它能同时挂连多个功能部件,且可互换使用。
如果是两个部件之间的专用信号连接线,就不能称为总线。
总线标准是指芯片之间、模板之间及系统之间,通过总线进行连接和传输信息时,应遵守的一些协议与规范。总线标准包括硬件和软件两个方面,如总线工作时钟频率、总线信号线定义、总线系统结构、总线仲裁机构与配置机构、电气规范、机械规范和实施总线协议的驱动与管理程序。通常说的总线,实际上指的是总线标准。
3.3 何为接口?何为接口标准?总线标准与接口标准有何特点?
答:
3.4 总线有哪几种形式?
答:1.根据总线不同的结构和用途分类
(1)专用总线。只实现一对物理部件间连接的总线称为专用总线,可同时完成收发。
(2)非专用总线。非专用总线可以被多种功能或多个部件所共享,所以也称之为共享总线,可分时复用。
2.根据总线的用途和应用环境分类
(1)局部总线。又称为芯片总线。它是微处理器总线的延伸,是微处理器与外部硬件接口的通路。它是构成中央处理机或子系统内所用的总线。局部总线通常包括地址总线(用于传递地址信息)、数据总线(用于传递数据信息)和控制总线(包括控制、时序和中断信号线,用于传递各种控制信息,决定了总线的性能好坏)三类。
(2)系统总线(内部总线(Internal Bus)—用于计算机内部模块(板)之间通信)。由于微处理器芯片总线驱动能力有限,所以大量的接口芯片不能直接挂在微处理器芯片上。系统总线又称内总线和板级总线,即微型计算机总线,用于各微处理机之间、模块之间的通信,可用于构成分布式多机系统,如STD总线、PC总线等。
(3)外总线。又称为通信总线,用于计算机之间或计算机与其它智能仪器仪表间的通信。外总线通常通过总线控制器挂接在系统总线上,外总线如图3所示。常用的外总线有:连接智能仪器仪表的IEEE-488通用接口总线、RS-232C、RS-422、RS-485、USB串行通信总线等。
3.根据总线传送信号的形式分类
(1)并行总线。如果用若干根信号线同时传递信号,就构成了并行总线。并行总线的特点是能以简单的硬件来运行高速的数据传输和处理。
(2)串行总线。串行总线是按照信息逐位的顺序传送信号。其特点是可以用几根信号线在远距离范围内传递数据或信息,主要用于数据通信。
上面提到的系统总线和局部总线均属于并行总线范畴。而现场总线(Fieldbus)则是连接工业过程现场仪表和控制系统之间的全数字化、双向、多站点的串行通信网络。
3.5 STD是什么总线?有何特点?
答:STD总线是内部总线(板机总线),是在计算机系统内连接各插件板的总线。由Matt Biewer研制,1978年由美国Pro-Log公司和Mostek公司首先作为工业标准而制定的8位工业I/O总线,以及随后发展的16位总线,统称为STD80。
1987年正式成为IEEE961标准。
STD总线采用同步方式进行数据传输。
STD总线的特点:
56根并行总线,采用小模板结构, 尺寸为165×114mm
模块化的总体设计布局
开放式的系统结构
拥有丰富的I/O功能
模板的小尺寸设计, 减少冲击和震动的影响
特别适合用来组建小型自动控制系统
STD总线的信号分配
56根并行总线都有明确的定义,按功能可分为五大类
(1)逻辑电源线6根(引线1~6)
(2)数据总线8根(引线7~14)
(3)地址总线16根(引线15~30)
(4)控制总线22根(引线31~52)
(5)辅助电源线4根(引线53~56)
在制定STD总线标准时以多种微处理器作为背景,许多类型的CPU引脚信号不必经过多少逻辑变换就可以于STD总线连接,所以其总线接口简单可靠,且对地址和数据线采用复用技术既可用于8位系统也可用于16位系统,系统地址空间可达16MB,同时,设置有多种等级的电源,如±5V、±12V,以及多条地线,给多种类型的模板提供电源,特别适合于高精度模拟量输入输出电路
综上所述,STD总线具有良好的抗干扰、防振动、抑操声的性能,接口简单,适应性强,简单易学,容易普及并支持多微处理机系统。
3.6 PC系列总线包括哪几种?
答:PC系列总线是以8088/8086为CPU的IBM/XT及其兼容机的XT62总线基础发展起来的,从最初的XT总线到PCI局部总线、以及最新的PCI Express总线。包括:
(1)ISA总线即AT总线,是在XT总线基础上扩充设计的16位总线其寻址空间最大16MB,操作速度为8MHz,数据传输速率为16MB/s。
(2)EISA总线(Extend ISA)是32为总线,支持总线主控,其数据传输速率可达32MB/s。(3)VL总线也称VESA Lacal总线,它是局部总线(local Bus)标准,是ISA总线的简单扩展,可以与ISA或EISA总线同时使用。由通过ISA总线进行的数据交换改为CPU总线直接进行,传送速度与CPU一致,局部总线设备可直接连接到处理器总线,并以处理器的时钟速率运行。
(4)PCI(外部设备连接接口)总线,PCI(Peripheral Component Interconnect)是美国SIG(Special Interest Group of Association for Computer Machinery)集团推出的64位总线。该总线的最高总线频率为33MHz,数据传输率为80Mby/s(峰值传输率为133Mby/s)
(5)PCI Express总线是在PCI基础上发展起来的第3代内部总线,解决了PCI总线的带宽问题
目前工业PC机大多采用ISA总线(AT总线)或PCI总线
3.7 PCI总线有何特点?
答:PCI总线的特点及系统结构
它是一种兼容性很强、功能齐全的计算机总线。可同时支持多组外围设备,且不受制于处理器,为CPU及外围设备高性能、高吞吐量、低延迟的数据通道。
PCI支持5V及3.3V的通信环境,其主要特点有:
①传输速率高。数据宽度是32位(64位),总线时钟33MHz(66MHz),最大传输速率为132MB/s(264MB/s)
②采用总线主控和同步操作。主控可让智能外围设备暂时接管总线,以加速执行高吞吐量、高优先级的任务。同步操作功能可保证微处理器与执行主控者的同时操作,无需等待后者完成任务再操作。
③PCI执行与CPU异步工作。PCI总线的工作频率固定为33MHz(66MHz),与CPU的工作频率无关,因此,PCI总线不受微处理器控制。
④低成本、高效益。PCI的芯片将系统功能高度集成,节省了逻辑电路,占用较小的电路板空间。PCI部件采用地址/数据线复用,使PCI部件用以连接其他部件的引脚数较少。
⑤软件兼容性好。由于PCI的设计是辅助现有的扩展总线标准,因此它与ISA、EISA及MCA 总线在软件上完全兼容,使用户的先前投资得到保证。
PCI总线是一种高性能32/64位地址数据复用总线。在高度集成的外围控制器件、外围插件板和处理器/存储器之间作为互连机构应用。在一个PCI系统中,可做到高速和低速外围设备共存,PCI总线与ISA/EISA总线共存。
3.8 PCI总线信号分哪两类?
答:在PCI应用系统中,取得总线控制权的设备称为“主设备”,而被主设备选中进行通信的设备称为“从设备”或“目标设备”。相应的接口信号线通常分为必备的和可选的两大类。若只作为目标设备,至少需47条接口信号线,若作为主设备,则需要49条。利用这些信号线可处理数据、地址,实现接口控制、仲裁以及系统功能。
3.9 PCI总线定义了哪3种物理地址空间?其中配置空间有何作用?
答:PCI总线定义了3种物理地址空间:内存地址空间、I/O地址空间和配置空间。前两者为通常意义的地址空间。PCI总线配置空间的目的是提供一个合适的配置设备集合,使其满足当前和未来系统配置特性的需要。配置空间是一个容量为256B并具有特定纪录结构的地址空间,该空间分为头标区和设备相关区两部分。软件必须使用I/O,通过内存的存取来访问设备配置空间。其结构如图
3.10 简要介绍PCI总线数据传输的基本操作规则(协议)。
答:PCI总线的基本操作规定(协议):
①基本的总线传输机制:一次突发传输包括一个地址期和一个或若干个数据期。
②除RST#、INTA#~INTD#之外的所有信号都是在时钟的上升沿被采样。
③PCI总线上数据传输基本上都由FRAME#,IRDY#,TRDY#三条信号线控制。
④当FRAME#和IRDY#都无效时,接口处于空闲状态。FRAME#信号建立后的第一个时钟前沿是地址期,在这个时钟前沿上传送地址和总线命令。下一个时钟前沿开始一个或若干个数据期,IRDY#,TRDY#同时有效时,所有时钟前沿进行一次数据传输。
⑤无论是主设备还是目标设备,一旦承诺了数据传输,就要进行到本次传输完成。
⑥FRAME#撤销而IRDY#建立,表示主设备准备好了最后一次数据传输,等到目标设备发出TRDY#信号,就标志着最后一次传输完成。
3.11 Compact PCI总线与PCI总线有何共同点与不同点?
答:
3.12 RS-232C和RS-485是什么总线?试对两者进行对比。
答:RS-232C和RS-485是外部总线。主要用于计算机系统与系统之间或计算机系统与外部设备之间的通信。
RS-232C串行总线是国际电子工业学会正式公布的串行总线标准,也是在计算机系统中最常用的串行接口标准,用于实现计算机与计算机之间、计算机与外设之间的同步或异步通信。采用RS-232C作为串行通信时,通信距离可达12m,传输数据的速率可任意调整,最大可达20kbps。
现在的计算机一般至少有两个RS-232串行口COM1和COM2,通常COM1使用的是9针D形连接器,而COM2使用的是老式的DB25针连接器
RS-232C的电气线路连接方式如图。
接口为非平衡型,每个信号用一根导线,所有信号回路公用一根地线。信号速率限于20Kbit/s内,电缆长度限于15m之内。由于是单线,线间干扰较大。其电性能用±12V。
注意:RS-232C采用负逻辑
在数据线TXD和RXD上:逻辑高电平为-3V~-15V,逻辑低电平为+3V~+15V;在控制线和状态线RTS、CTS、DSR、DTR和DCD上:信号有效电平为+3V~+15V,信号无效电平为-3V~-15V。RS-232C逻辑状态定义的正负电压范围与TTL高低电平表示逻辑状态的规定不同。因此,为了能够使计算机接口与终端的TTL器件连接,必须在RS-232C 与TTL电路之间进行电平和逻辑关系变换。
RS-232C既是协议标准又是电气标准,它描述了在终端和通信设备之间信息交换的方式和功能。然而,RS-232C有一系列不足:
(1)数据传输速率局限于20kbps;
(2)传输距离较短;
(3)该标准没有规定连接器,因而设计方案不尽相同,这些方案有时互不兼容;
(4)每个信号只有一根导线,两个传输方向共用一个信号地线;
(5)接口使用不平衡的发送器和接收器,可能在各信号成分间产生干扰。
针对RS-232C串口标准的局限性,又提出了RS-485、RS-422接口标准。RS-485/422采用平衡发送和差分接收方式实现通信:发送端将串行口的TTL电平信号转换成差分信号,通过两路输出,经过线缆传输之后在接收端将差分信号还原成TTL电平信号。由于传输线通常使用双绞线,又是差分传输,所以有极强的抗共模干扰的能力,总线收发器灵敏度很高,可以检测200mV电压。
RS-485接口采用二线差分平衡传输。差分电路的最大优点是抑制噪声。由于在它的两根信号线上传递着大小相同、方向相反的电流,而噪声电压往往在两根导线上同时出现,一根导线上出现的噪声电压会被另一根导线上出现的噪声电压抵消,因而可以极大地削弱噪声对信号的影响。
RS-485/422最大的通信距离约为1219m,最大传输速率为10Mbps,传输速率与传输距离成反比,在100kbps的传输速率下,才可以达到最大的通信距离,RS-485采用半双工工作方式,支持多点数据通信。RS-485总线网络一般采用终端匹配的总线型结构,即采用一条总线将各个节点串接起来,不支持环形或星型网络。
RS-485网络互联。利用RS-485接口可以使一个或多个信号发送器与接收器互联,在多台计算机或带微处理器的设备之间实现远程数据通信,形成分布式测控系统。
大多数应用中,RS-485的端口连接采用半双工通信方式,多个驱动器和接收器共享一条信号通路。
两个120Ω的电阻为总线终端电阻,当终端电阻等于电缆的特征阻抗时,可以削弱甚至消除信号的反射。RS-485的驱动器能驱动32个单位负载。
在半双工连接时,在同一时间内只能有一个驱动器工作,否则会在某个元件上产生大电流。所以所有RS-485的接口芯片上都必须包括限流和过热关闭功能。
RS-232C和RS-485之间的转换可以采用RS-232C/RS-485转换模块。
3.13 IEEE488是什么总线?通常作为什么设备接口?有何特点?
3.14 IPC工业控制机在结构上与普通PC机有何不同?
答:1.IPC工业控制机主要特点
(1) 兼容性好、升级容易
(2) 性能价格比高
(3) 丰富的软件支持
(4) 通信功能强
(5) 可靠性高
2.IPC工业控制机体系结构
3.IPC工业控制机的结构
4.外围接口部件
(1) 输入接口模板
(2) 输出接口模板
(3) 通信接口模板
(4) 信号调理模块
(5) 远程数据采集模块
(6) 人机接口
3.15 DCS现场控制站结构上有何特点?通常有那几部分组成?
3.16 可编程控制器有何特点?
3.17 何谓嵌入式工控机?嵌入式系统的基本特征是什么?
3.18 嵌入式处理器有哪几种主要类型?ARM属于哪种类型的嵌入式处理器?
3.19 PC/104总线工控机有何特点?PCI/104总线结构有何特点?
3.20 数字调节器在计算机控制系统中有何作用?
3.21 分布式数据采集控制模块有何特点?它与PLC有何不同?有何共同点?
3.22 数据采集仪有何特点?通常用于哪些场合?
3.23 PXI总线与Compact PCI总线有何共同点和不同点?
3.24 PXI总线仪表有何特点?通常用于哪种场合?
3.25 从本章中任选一个议题,收集与该议题相关资料,写一篇文献综述。
第3章钢筋混凝土受弯构件习题和思考题及答案word版本
第3章钢筋混凝土受弯构件习题和思考题 及答案
第三章钢筋混凝土受弯构件 问答题 1.适筋梁正截面受弯全过程可划分为几个阶段?各阶段的主要特点是什么?与计算有何联 系? 1.答:适筋梁正截面受弯全过程可划分为三个阶段—混凝土开裂前的未裂阶段、混凝土开裂后至钢筋屈服前的裂缝阶段和钢筋开始屈服前至截面破坏的破坏阶段。 第Ⅰ阶段的特点是:1)混凝土没有开裂;2)受压区混凝土的应力图形是直线,受拉区混凝土的应力图形在第Ⅰ阶段前期是直线,后期是曲线;3)弯矩与 I阶段可作为受弯构件抗裂度的计算依据。 截面曲率基本上是直线关系。 a 第Ⅱ阶段的特点是:1)在裂缝截面处,受拉区大部分混凝土推出工作,拉力主要由纵向受拉钢筋承担,但钢筋没有屈服;2)受压区混凝土已有塑性变形,但不充分,压应力图形为只有上升段的曲线;3)弯矩与截面曲率是曲线关系,截面曲率与挠度的增长加快了。阶段Ⅱ相当于梁使用时的受力状态,可作为使用阶段验算变形和裂缝开展宽度的依据。 第Ⅲ阶段的特点是:1)纵向受拉钢筋屈服,拉力保持为常值;裂缝截面处,受拉区大部分混凝土已退出工作,受压区混凝土压应力曲线图形比较丰满,有上升曲线,也有下降段曲线;2)由于受压区混凝土合压力作用点外移使内力臂增大,故弯矩还略有增加;3)受压区边缘混凝土压应变达到其极限压应变实验值 时,混凝土被压碎,截面破坏;4)弯矩—曲率关系为接近水平的曲线。第Ⅲcu 阶段末可作为正截面受弯承载力计算的依据。
2.钢筋混凝土梁正截面受力全过程与匀质弹性材料梁有何区别? 2.答:钢筋混凝土梁正截面受力全过程与匀质弹性材料梁的区别有:钢筋混凝土梁从加载到破坏的全过程分为三个阶段;从第Ⅱ阶段开始,受拉区混凝土就进入塑性阶段,梁就开始带裂缝工作,受拉区拉力都由钢筋来承担,直到第Ⅲ阶段末整个梁破坏,而匀质弹性材料梁没有这两个阶段,始终是在弹性阶段内工作的。 3.钢筋混凝土梁正截面有哪几种破坏形态?各有何特点? 3. 答:钢筋混凝土梁正截面有适筋破坏、超筋破坏和少筋破坏三种。 其各自特点为: 1)适筋破坏:从屈服弯矩M y到极限弯矩M u有一个较长的变形过程,钢筋屈服处的临界裂缝急剧开展和挠度急速增长,将给人以明显的破坏预兆,具有延性破坏的特征。 2)超筋破坏:钢筋在梁破坏前仍处于弹性阶段尚未屈服,所以钢筋伸长不多,没有形成一条集中的临界裂缝,裂缝分布比较细密,挠度不大,没有明显的预兆,具有脆性破坏的特征。 3)少筋破坏:受拉混凝土“一裂即坏”,构件由于钢筋应力突增且迅速屈服导致裂缝过宽或挠度过大而失效,破坏时仅出现一条很宽的集中裂缝,沿梁高延伸很高,受压区混凝土虽未压碎但已经失效,破坏十分突然,属于脆性破坏。 4.梁内纵向受拉钢筋的根数、直径及间距有何规定?纵向受拉钢筋什么情况下才按两排设 置? 4 .答:梁内纵向受拉钢筋宜采用HRB400级或HRB335级,常用直径为12~ 25mm,根数最好不少于3(或4)根。纵向受拉钢筋水平方向的净间距不应小于
解析几何专题含答案
椭圆专题练习 1.【2017浙江,2】椭圆22 194 x y +=的离心率是 A B C .23 D .5 9 2.【2017课标3,理10】已知椭圆C :22 221x y a b +=,(a >b >0)的左、右顶点分别为A 1,A 2,且以线段A 1A 2为直径的圆与直线20bx ay ab -+=相切,则C 的离心率为 A .3 B .3 C .3 D .13 3.【2016高考浙江理数】已知椭圆C 1:+y 2=1(m >1)与双曲线C 2:–y 2=1(n >0)的焦点重合,e 1, e 2分别为C 1,C 2的离心率,则() A .m >n 且e 1e 2>1 B .m >n 且e 1e 2<1 C .m
第三章配气机构
1.功用: 配气机构是进、排气管道的控制机构,它按照气缸的工作顺序和工作过程的要求,准时地开闭进、排气门、向气缸供给可燃混合气(汽油机)或新鲜空气(柴油机)并及时排出废气。另外,当进、排气门关闭时,保证气缸密封。进饱排净,四行程发动机都采用气门式配气机构。 2.充气效率 新鲜空气或可燃混合气被吸入气缸愈多,则发动机可能发出的功率愈大。新鲜空气或可燃混合气充满气缸的程度,用充气效率ηv表示。ηv越高,表明进入气缸的新气越多,可燃混合气燃烧时可能放出的热量也就越大,发动机的功率越大。 3.型式 气门位于气缸盖上称为气门顶置式配气机构,由凸轮、挺柱、推杆、摇臂、气门和气门弹簧等组成。其特点,进气阻力小,燃烧室结构紧凑,气流搅动大,能达到较高的压缩比,目前国产的汽车发动机都采用气门顶置式配气机构。 气门位于气缸体侧面称为气门侧置式配气机构,由凸轮、挺柱、气门和气门弹簧等组成。省去了推杆、摇臂等另件,简化了结构。因为它的进、排气门在气缸的一侧,压缩比受到限制,进排气门阻力较大,发动机的动力性和高速性均较差,逐渐被淘汰。 凸轮轴下置式,主要缺点是气门和凸轮轴相距较远,因而气 门传动另件较多,结构较复杂,发动机高度也有所增加。
凸轮轴中置,凸轮轴位于气缸体的中部由凸轮轴经过挺柱直接驱动摇臂,省去推杆,这种结构称为凸轮轴中置配气机构。凸轮轴上置,凸轮轴布置在气缸盖上。 凸轮轴上置有两种结构,一是凸轮轴直接通过摇臂来驱动气门,这样既无挺柱,又无推杆,往复运动质量大大减小,此结构适于高速发动机。另一种是凸轮轴直接驱动气门或带液力挺柱的气门,此种配气机构的往复运动质量更小,特别适应于高速发动机. 凸轮轴下置,中置的配气机构大多采用圆柱形正时齿轮传动,一般 从曲轴到凸轮轴只需一对正时齿轮 传动,若齿轮直径过大,可增加一个中间齿轮。为了啮合平稳, 减小噪声,正时齿轮多用斜齿。 链条与链轮的传动适用于凸轮轴上置的配气机构,但其工作可 靠性和耐久性不如齿轮传动。近年来高速汽车发动机上广泛采 用齿形皮带来代替传动链,齿形带传动,噪声小、工作可靠、 成本低. 一般发动机都采用每缸两个气门,即一个进气门和一个排气门的结构。为了改善换气,在可能的条件下,应尽量加大气门的直径,特别是进气门的直径。但是由于燃烧 室尺寸的限制,气门直径最大一般不能超过气缸直径的一半。当气 缸直径较大,活塞平均速度较高时,每 缸一进一排的气门结构就不能保证良 好的换气质量。因此,在很多新型汽车 发动机上多采用每缸四个气门结构。即 两个进气门和两个排气门。 4.组成
计算机网络第三章习题答案解析
第三章数据链路层 3-01 数据链路(即逻辑链路)与链路(即物理链路)有何区别? “电路接通了”与”数 据链路接通了”的区别何在? 答:数据链路与链路的区别在于数据链路出链路外,还必须有一些必要的规程来控制数 据的传输,因此,数据链路比链路多了实现通信规程所需要的硬件和软件。 “电路接通了”表示链路两端的结点交换机已经开机,物理连接已经能够传送比特流了 ,但是,数据传输并不可靠,在物理连接基础上,再建立数据链路连接,才是“数据链 路接通了”,此后,由于数据链路连接具有检测、确认和重传功能,才使不太可靠的物 理链路变成可靠的数据链路,进行可靠的数据传输当数据链路断开连接时,物理电路连 接不一定跟着断开连接。 3-02 数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层 有哪些优点和缺点. 答:链路管理帧定界流量控制差错控制 将数据和控制信息区分开透明传输寻址可靠的链路层的优点和缺点取决于所应用的环境:对于干扰严重的信道,可靠的链路层可以将重传范围约束在局部链路,防止全网络的传输效率受损;对于优质信道,采用可靠的链路层会增大资源开销,影响传输效率。 3-03 网络适配器的作用是什么?网络适配器工作在哪一层? 答:适配器(即网卡)来实现数据链路层和物理层这两层的协议的硬件和软件 网络适配器工作在TCP/IP协议中的网络接口层(OSI中的数据链里层和物理层) 3-04 数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以 解决? 答:帧定界是分组交换的必然要求;透明传输避免消息符号与帧定界符号相混淆; 差错检测防止有差错的无效数据帧浪费后续路由上的传输和处理资源 3-05 如果在数据链路层不进行帧定界,会发生什么问题? 答:无法区分分组与分组;无法确定分组的控制域和数据域;无法将差错更正的范围限定在确切的局部 3-06 PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况 ?为什么PPP协议不能使数据链路层实现可靠传输? 答:简单,提供不可靠的数据报服务,检错,无纠错不使用序号和确认机制 地址字段A 只置为 0xFF。地址字段实际上并不起作用。控制字段 C 通常置为 0x03。PPP 是面向字节的当 PPP 用在同步传输链路时,协议规定采用硬件来完成比特填充(和HDLC 的做法一样),当 PPP 用在异步传输时,就使用一种特殊的字符填充法 PPP适用于线路质量不太差的情况下、PPP没有编码和确认机制 3-07 要发送的数据为1101011011。采用CRC的生成多项式是P(X)=X4+X+1。试求应 添加在数据后面的余数。数据在传输过程中最后一个1变成了0,问接收端能否发现?若 数据在传输过程中最后两个1都变成了0,问接收端能否发现?采用CRC检验后,数据链 路层的传输是否就变成了可靠的传输? 答:作二进制除法,11010110110000模2除 10011 得余数1110 ,添加的检验序列是1110.
(电子行业企业管理)模拟电子技术基础学习指导与习题解答(谢红主编)第三章思考题与习题
第三章 思考题与习题解答 3-1 选择填空(只填a 、b 、c 、d) (1)直接耦合放大电路能放大,阻容耦合放大电路能放大 。(a.直流信号,b.交流信号,c.交、直流信号) (2)阻容耦合与直接耦合的多级放大电路之间的主要不同点是 。(a.所放大的信号不同,b.交流通路不同,c.直流通路不同) (3)因为阻容耦合电路 (a1.各级Q 点互相独立,b1.Q 点互相影响,c1.各级Au 互不影响,d1.Au 互相影响),所以这类电路 (a2.温漂小,b2.能放大直流信号,c2.放大倍数稳定),但是 (a3.温漂大,b3.不能放大直流信号,c3.放大倍数不稳定)。 目的 复习概念。 解 (1)a 、b 、c ,b 。(2)a 、c 。(3)a1,a2,b3。 3-2 如图题3-2所示两级阻容耦合放大电路中,三极管的β均为100,be1 5.3k Ωr =,be26k Ωr =,S 20k ΩR =,b 1.5M ΩR =,e17.5k ΩR =,b2130k ΩR =,b2291k ΩR =,e2 5.1k ΩR =,c212k ΩR =,1310μF C C ==,230μF C =,e 50μF C =,CC V =12 V 。 图题3-2 (a)放大电路;(b)等效电路(答案) (1)求i r 和o r ; (2)分别求出当L R =∞和L 3.6k ΩR =时的S u A 。 目的 练习画两级放大电路的微变等效电路,并利用等效电路求电路的交流参数。 分析 第一级是共集电路,第二级是分压供偏式工作点稳定的典型电路,1V 、2V 均为
NPN 管。 解 (1)求交流参数之前先画出两级放大电路的微变等效电路如图题3-2(b)所示。注意图中各级电流方向及电压极性均为实际。第一级中b1I 的方向受输入信号i U 极性的控制,而与1V 的导电类型(NPN 还是PNP)无关,i U 上正下负,因此b1I 向里流,输出电压o1U 与i U 极性相同;第二级中b2I 的方向受o1U 极性的控制,o1U 上正下负,因此b2I 向里流,也与2V 的导电类型无关,或者根据c1I 的方向(由1c 流向1e )也能确定b2I 的方向是向里流。再由电流的受控关系c1I (=2b2I β)的方向向下流(由2c 流向2e ),输出电压o U 的实际极性应是下正上负,与假设极性相反。等效电路应画成“一”字型,如图所示。 e1 e1i2e1b21b22be2////////R R r R R R r '== 7.5//30//91//6 2.9k Ω=≈ 则 [][]3 i b be11e1//(1) 1.510//5.3(1100) 2.9294k Ωr R r R β'=++=?++?≈ 因为第二级是共射电路,所以其输出电阻近似由c2R 决定: o c212k Ωr R ≈= (2)求o S S u U A U =。 当L R =∞时,L c212k ΩR R '== 1e11be11e1 (1)(1100) 2.90.98(1) 5.3(1100) 2.9u R A r R ββ'++?==≈'++++? c222be2121002006 u R A r β=-=-?=- 120.98(200)u u u A A A =?=?-=-196 则 i S S i 249(196)18120249 u u r A A R r =?=-?=-++ 当L 3.6k ΩR =时,L c2L //12//3.6 2.77k ΩR R R '=== L 22be2 2.77100466 u R A r β'=-=-?=- 0.98(46)45u A =?-=-
第三章习题和思考题参考答案
第三章习题和思考题 一、填空题 1、对于指令XCHG BX, [BP+SI],如果指令执行前,(BX)=6F30H,(BP)=0200H,(SI)=0046H,(SS)=2F00H,(2F246H)=154H,(2F247H)=41 H,则执行指令后:(BX)=__4154H__,(2F246H)=___30H______,(2F247H)=___6FH____。 2、指令LOOPZ/LOOPE是结果_为零_且_相等发生转移的指令;而指令LOOPNZ/LOOPNE则是结果__不为零__且____不相等___发生转移的指令。 3、串操作指令规定源串在____数据_____段中,用__SI___来寻址源操作数;目的串在__附加__段中,用__DI__来寻址目的操作数。 4.、中断返回指令IRET后,从堆栈顺序弹出3个字分别送到___IP____、__CS_____、____标志寄存器FR____。 5、设(SS)=0FFA0H,(SP)=00B0H,(AX)=8057H,(BX)=0F79H,执行指令PUSH AX 后,(SP)=__00AEH________;若再执行指令: PUSH BX POP AX 后,(SP)=__00AEH________,(AX)=____0F79H________,(BX)=___0F79H_____。 6、设(SS)=2250H,(SP)=0140H,若在堆栈中存入5个数据,则栈顶的物理地址为___22636H________,如果再从堆栈中取出3个数据,则栈顶的物理地址为_____2263CH____。 7、M OV AL, ‘A’指令的源操作数的寻址方式为__立即寻址方式________。 8、指出下列指令源操作数的寻址方式: (1).MOV AX, BLOCK[SI] 寄存器相对寻址方式 (2).MOV AX, [SI] 寄存器间接寻址方式 (3).MOV AX, [6000H] 直接寻址 (4).MOV AX, [BX+SI] 基址变址寻址 (5).MOV AX, BX 寄存器寻址 (6).MOV AX, 1500H 立即寻址 (7).MOV AX, 80[BX+DI] 相对基址变址 (8).MOV AX, [DI+60] 寄存器相对寻址 9、以CX寄存器内容为计数对象的指令有循环控制指令和串操作重复指令。
解析几何第四版吕林根课后习题答案第三章(同名3095)
第三章 平面与空间直线 § 3.1平面的方程 1.求下列各平面的坐标式参数方程和一般方程: (1)通过点)1,1,3(1-M 和点)0,1,1(2-M 且平行于矢量}2,0,1{-的平面(2)通过点 )1,5,1(1-M 和)2,2,3(2-M 且垂直于xoy 坐标面的平面; (3)已知四点)3,1,5(A ,)2,6,1(B ,)4,0,5(C )6,0,4(D 。求通过直线AB 且平行于直线CD 的平面,并求通过直线AB 且与ABC ?平面垂直的平面。 解: (1)Θ }1,2,2{21--=M M ,又矢量}2,0,1{-平行于所求平面, 故所求的平面方程为: ?? ? ??++-=-=--=v u z u y v u x 212123 一般方程为:07234=-+-z y x (2)由于平面垂直于xoy 面,所以它平行于z 轴,即}1,0,0{与所求的平面平行,又 }3,7,2{21-=M M ,平行于所求的平面,所以要求的平面的参数方程为: ?? ? ??+-=+-=+=v u z u y u x 317521 一般方程为:0)5(2)1(7=+--y x ,即01727=--y x 。 (3)(ⅰ)设平面π通过直线AB ,且平行于直线CD : }1,5,4{--=,}2,0,1{-= 从而π的参数方程为: ?? ? ??+-=+=--=v u z u y v u x 235145 一般方程为:0745910=-++z y x 。 (ⅱ)设平面π'通过直线AB ,且垂直于ABC ?所在的平面 ∴ }1,5,4{--=, }1,1,1{4}4,4,4{}1,1,0{}1,5,4{==-?--=?
国际贸易和实务第三章习题答案解析
国际贸易习题答案 配套教材:《国际贸易理论与实务 (第二版) 》 主编:赵登峰江虹 出版社:高等教育出版社 2012年8月 第三章 一、填空题 1、南北贸易 2、外部 3、产业内 4、历史或偶然 5、产品生命周期 6、收入水平 7、林德 8、贸易模式 9、对外贸易乘数 10、通过补贴获得市场份额 11、自由贸易政策 12、《综合贸易法》 13、进口替代政策 14、出口替代政策 15、规模经济 16、最优关税 17、知识产权保护 18、大低 19、先发优势 20、产业内贸易产业间贸易 21、《就业、利息和货币通论》 22、劳动密集型 23、战略性贸易理论 24、竞争效率 25、政府干预 二、判断题
三、单项选择题 四、问答题 1、产业内贸易和产业间贸易有什么区别?产业内贸易是怎么发生的? 答:产业内贸易和产业间贸易之间的区别有: (一)产业间贸易是建立在国家间要素禀赋差异产生的比较优势之上,而产业内贸易则是以产品差异性和规模经济为基础。 (二)产业间贸易的流向可以根据贸易前同种产品的相对价格差来确定;如果在规模经济条件下进行差异产品的生产与产业内贸易,贸易前相对价格就不能准确预测贸易模式。 (三)按照要素禀赋理论,产业间贸易会提高本国丰裕要素的报酬和降低本国稀缺要素的报酬,而基于规模经济的产业内贸易可以使所有要素都获得收入。 (四)在以要素禀赋差异为基础的产业间贸易条件下,要素的国际流动在一定程度上是贸易的一种替代品;而在要素禀赋相似的国家间产业内贸易条件下,要素流动带来了作为产业内贸易主要载体的跨国公司的兴起。从这点来说,产业内贸易与要素流动之间存在着一定的互补关系。 产业内贸易的成因有: (一)产品的差异性是产业内贸易的基础。产品的差异性满足了不同消费者的特殊偏好,并且成为产业内贸易存在与发展的客观条件。有的学者甚至认为,并不一定要有规 模效益,只要产品存在着多样性,就足以引起产业内贸易。 (二)规模经济是国际贸易的一个独立起因,并对产业内贸易模式具有较强解释力。同类产品因产品差别与消费者偏好的差异而相互出口,可以扩大生产规模进而扩大市 场。这样,就使研制新产品的费用和设备投资分摊在更多的产品上,可以节约研发 费用,进而降低单位产品成本。 (三)两国需求的重叠程度及经济发展水平。重叠需求理论认为,发达国家的消费结构与收入水平的相似性决定了重叠需求范围较大,贸易关系较密切,对发达国家之间的 产业内贸易有一定的解释力。 (四)从技术差异商品看,产业内贸易产生的原因,主要是产品存在生命周期。根据产品生命周期理论,工业最发达的国家出口那些技术先进的新产品,同时进口那些技术 比较成熟的工业品,因而处于不同生命周期阶段的同类产品会发生产业内贸易。(五)国际直接投资与产业内贸易的形成。随着跨国公司的大量出现,跨国公司的投资行为对国际贸易的影响越来越大,极大地促进了产业内贸易的发展。 2、外部规模经济形成的原因有哪些? 答:新古典经济学、新制度经济学、产业组织理论和新增长理论从不同的角度解释了外部规模经济形成的原因: (一)新古典经济学的奠基人马歇尔主要从要素市场的供给与需求分析外部规模经济产生
第三章 思考题与练习题.doc
TO \/\ ) ) ) TO Y10 ) 第三章思考题与练习题 3-1写出题3-1图中梯形图对应的指令表语句。 题3-1图 3-2根据题3-2图,画出X10接通后,Y10的输出波形图,并写出与题3-2图对应的 指令 表语句(al=a2=#300)o X10 题3-2图 3-3 PCC 程序设计包括哪些基本的内容?(思考题) 3-4什么是PCC 程序设计的状态分析法?(思考题) 3-5简单叙述状态分析法编制程序的步骤。(思考题) 3-6 PCC 的编程语言有何特点?(思考题) 3-7最常用的PCC 编程语言为梯形图和指令表语句,那么这两种语言各有什么特点? (思 考题) 3-8将题3-8图的梯形图简化改进后,画出新梯形图,并写出相应的指令表语句。(思 考 题) ) ) )
3-9画岀与下面指令表语句对应的梯形图。 LD M200 ORN X400 AND( MI0I ORN MI02 OR( M3I 5 AND X403 ) OR( X40I ANDN X402 ) ) ORN X405 ST MI05 3-10设有装料、送料、卸料小车,在初始位置0处,按动启动按钮后,进行装料,10 min 后,小车开始向右送料(此时左限位开关X0接通,右限位开关XI 断开),当达到右端 右限位开关XI 接通,小车便开始卸料,5 min 后,开始返回(左行),小车到达左端X0接 通,小车停在左端,又开始装料,此后,重复前述运动。当按下停止按钮,小车停止 工 作。 设计控制小车装料、送料、卸料、返回、停止运动的梯形图及对应的指令表语句。 设启动按钮为X10,停止按钮为XII,定时器调用功能块TON 来实现,右行输出逻辑 线圈为 Y0,左行为Y1,装料为Y3,卸料为Y4。 3-11有按红,黄,绿,红,……,黄,绿顺序布詈的12只节日彩灯,要求: (1) 每Is 移动一个灯位; (2) 每次亮0.5 s; (3) 有一个选择开关:每次只点亮一只灯泡或者每次点亮相邻的三只灯泡。 请设计控制程序,绘出梯形图并编写出指令表语句。 3-12用煤气加热烧杯中的溶液到一定的温度,每隔一定的时间测试一次它的温度,测 试三 次后,计算这三次的温度平均值act_tmp ,预先给定预设温度set_tmp ,实现以下的控 制要求: (1) act_tmp < set_tmp 时激活加热器开关heat 。 (2) act_tmp > set_tmp 时激活降温器开关cool 。 请用指令表语言和高级语言Automation Basic 设计该控制程序。 3-13行车上有五个载重传感器。必须将单个的负载加起来,才能确定整个负载。若总 负载 大于预设负载,则发出警告。 请用指令表语言和高级语言Automation Basic 设计该控制程序。 3-14用高级语言Automation Basic 设计投币式公用电话的控制程序。要求投入一个硬 币 可以通话3 min,当时间还剩30 s 时给出投币提示。 3-15有10个学生,每个学生的数据包括学号,姓名,三门课的成绩,输入10个学生 数 据,要求计算三门课的总平均成绩,对于总平均成绩高于80分的学生打印出学号,姓名 及 “Excellent!”的字符串;对于总平均成绩高于70分小于80分的学生打印出学号,姓名 及“Good!”的字符串;对于总平均成绩高于60分小于70分的学生打印出学号,姓名及“Pass!” 的字 符串;对于总平均成绩小于60分的学生打卬出学号,姓名及“Not -Pass!”的字符串, 用高级语言 Automation Basic 编程实现。 3-16写出题3-16图中梯形图对应的指令语句表。(思考题) 3-17利用编程技巧,将题3-16图中的梯形图改画成最省指令的形式,并分别编程, 作以 比较。(思考题)
第三章习题
第三章思考题 一、选择题 1.电涡流式传感器是利用( A )材料的电涡流效应工作的。 A.金属导体 B.半导体 C.非金属 D. PVF 2 2.为消除压电传感器电缆分布电容变化对输出灵敏度的影响,可采用( 3. )。 A.电压放大器 B. 电荷放大器 C.前置放大器 3.磁电式振动速度传感器的数学模型是一个()。 A. 一阶环节 B.二阶环节 C.比例环节 4. 磁电式振动速度传感器的测振频率应()其固有频率。 A.远高于 B.远低于 b C.等于 5. 压电式加速度计,其压电片并联时可提高()。 A.电压灵敏度 B.电荷灵敏度 C.电压和电荷灵敏度 6.下列传感器中()是基于压阻效应的。 A.金属应变片 B.半导体应变片 C.压敏电阻 7.压电式振动传感器输出电压信号与输入振动的()成正比。 A.位移 B.速度 C.加速度 8.石英晶体沿机械轴受到正应力时,则会在垂直于()的表面上产生电荷量。 A.机械轴 B.电轴 C.光轴 9.石英晶体的压电系数比压电陶瓷的()。 A.大得多 B.相接近 C.小得多 10.光敏晶体管的工作原理是基于()效应。 A.外光电 B.内光电 C.光生电动势 11.一般来说,物性型的传感器,其工作频率范围()。 A.较宽 B.较窄 C.不确定 12.金属丝应变片在测量构件的应变时,电阻的相对变化主要由()来决定的。 A.贴片位置的温度变化 B. 电阻丝几何尺寸的变化
C.电阻丝材料的电阻率变化 13.电容式传感器中,灵敏度最高的是()。 A.面积变化型 B.介质变化型 C.极距变化型 14.高频反射式涡流传感器是基于()和()的效应来实现信号的感受和变化的。 A.涡电流 B.纵向 C.横向 D.集肤 15.压电材料按一定方向放置在交变电场中,其几何尺寸将随之发生变化,这称为()效应。 A.压电 B.压阻 C.压磁 D.逆压电 二、填空题 1.可用于实现非接触式测量的传感器有___和___等。 2.电阻应变片的灵敏度表达式为 / 12 / dR R S E dl l υλ ==++,对于金属应变片来说: S=___,而对于半导体应变片来说S=___。 3.具有___的材料称为压电材料,常用的压电材料有___和___。 4.当测量较小应变值时应选用___效应工作的应变片,而测量大应变值时应选用___效应工作的应变片。 5.电容器的电容量0A C εε δ =,极距变化型的电容传感器其灵敏度表达式为:_ __。 6. 极距变化型的电容传感器存在着非线性度,为了改善非线性度及提高传感器的灵敏度,通常采用___的形式。 7.差动变压器式传感器的两个次级线圈在连接时应___。 8.光电元件中常用的有___、___和___。 9.不同的光电元件对于不同波长的光源,其灵敏度是___。 10.发电式传感器(也称能量转换型传感器)有___、___等,而电参量式的传感器(也称能量控制型传感器)主要是___、___和___等。 11.压电传感器在使用___放大器时,其输出电压几乎不受电缆长度变化的影
第三章 平面机构的运动分析 习题与答案
第三章平面机构的运动分析 1 机构运动分析包括哪些内容 2 对机构进行运动分析的目的是什么 3 什么叫速度瞬心 4 相对速度瞬心和绝对速度瞬心有什么区别 5 在进行机构运动分析时,速度瞬心法的优点及局限是什么 6 什么叫三心定理 7 怎样确定组成转动副、移动副、高副的两构件的瞬心怎样确定机构中不组成运动副的两构件的瞬心 8 在同一构件上两点的速度和加速度之间有什么关系 9组成移动副两平面运动构件在瞬时重合点上的速度和加速度之间有什么关系 · 10 平面机构的速度和加速度多边形有何特性 11 什么叫“速度影像”和“加速度影像”,它在速度和加速度分析中有何用处 12 机构运动时在什么情况下有哥氏加速度出现它的大小及方向如何决定 13 如何根据速度和加速度多边形确定构件的角速度和角加速度的大小和方向 14 如何确定构件上某点法向加速度的大小和方向 15 当某一机构改换原动件时,其速度多边形是否改变其加速度多边形是否改变 16 什么叫运动线图它在机构运动分析时有什么优点 17 当两构件组成转动副时,其相对速度瞬心在处;组成移动副时,其瞬心在处;组成滑动兼滚动的高副时,其瞬心在处. 18相对瞬心与绝对瞬心相同点是,而不同点是. 19速度影像的相似原理只能用于两点,而不能用于机构的各点. … 20速度瞬心可以定义为互相作平面相对运动的两构件上的点. 21 3个彼此作平面平行运动的构件共有个速度瞬心,这几个瞬心必位于.含有6个构件的平面机构,其速度瞬心共有个,其中个是绝对瞬心,有个相对瞬心. 22 在图示机构中,已知原动件1以匀角速度沿逆时针方向转动,试确定:(1)机构的全部瞬心;(2)构件3的速度v3(需写出表达式)。
现代移动通信-蔡跃明-第三版思考题与习题参考答案-chapter-3
第三章思考题与习题 1.组网技术包括哪些主要问题? 答:(1)干扰对系统性能的影响; (2)区域覆盖对系统性能的影响; (3)支撑网络有序运行的要素; (4)越区切换和位置管理; (5)无线资源的有效共享。 2.为何会存在同频干扰?同频干扰会带来什么样的问题? 答:同频干扰是指所有落在接收机通带内的与有用信号频率相同的无用信号的干扰,这些无用信号和有用信号一样,在超外差接收机经放大、变频而落在中频通带内,接收系统无法滤出无用信号,从而产生同频干扰。 同频干扰会带来的问题:影响链路性能、频率复用方案的选择和系统的容量限制等问题3.什么叫同频复用?同频复用系数取决于哪些因素? 答:在移动通信系统中,为了提高频率利用率,在相隔一定距离以外,可以使用同的频率,这称为同频复用。 影响同频复用系数的因素有:一个区群(簇)中小区的个数(区群的大小),小区的大小,形状等。 4.为何说最佳的小区形状是正六边形?
答:小区形状的设计要求:小区无空隙、无重叠的覆盖整个服务区域。 全向天线辐射的覆盖区为圆形,不能无空隙、无重叠的覆盖整个区域。在考虑交叠之后,实际上每个辐射区的有效覆盖区是一个多边形。满足无空隙、无重叠条件的小区形状有三种:正三角形、正方形和正六边形。而在服务区面积一定的情况下,正六边形小区的形状最接近理想的圆形,用它覆盖整个服务区所需的基站数最少,也就最经济。 5. 证明对于六边形系统,同频复用系数为22Q N i j ij ==++。 证明:同频复用系数Q 的定义为在同频些小区距离)(D 与小区半径)(R 的比值。 同频小区的距离也就是两个同频小区的中心距离,对于正六边形系统它是这样确定的,从一个小区的中心出发,沿着一边的中垂线数i 个小区,在向顺时针转060再向前数j 个小区,起点和终点的两个小区的距离就是同频小区的距离。由余弦定理可得 R ij j i D )(322++=,又因为ij j i N ++=22 所以N R R N R D Q 33===即得证。 6. 设某小区移动通信网,每个区群有4个小区,每个小区有5个信道。试用分区分组配 置法完成群内小区的信道配置?(见书上15,16页和6页) 答:根据分区分组配置法进行信道配置要满足无三阶互调干扰的要求,利用无三阶互调干扰的原理可知道只需在无三阶互调干扰的信道组中初选一组信道组,将初选的信道组进行平移就可以得到。在这里我们选用1,2,5,11,13,利用上述思想可以得到 第一组 1,2,5,11,13 第二组 8,9,12,18,20 第三组 3,4,7,15,17 第四组 6,10,16,22,23
复变函数习题答案第3章习题详解
第三章习题详解 1. 沿下列路线计算积分? +i dz z 30 2 。 1) 自原点至i +3的直线段; 解:连接自原点至i +3的直线段的参数方程为:()t i z +=3 10≤≤t ()dt i dz +=3 () ()()?? +=??????+=+= +1 3 1 332 3 30 2 3313313i t i dt t i dz z i 2) 自原点沿实轴至3,再由3铅直向上至i +3; 解:连接自原点沿实轴至3的参数方程为:t z = 10≤≤t dt dz = 33 33 2 3 2 33131=??? ???== ? ? t dt t dz z 连接自3铅直向上至i +3的参数方程为:it z +=3 10≤≤t i d t dz = () ()()33 1 31 2 33 2 3313313313-+=??????+=+= ?? +i it idt it dz z i ()()()33 3 3 1 02 30 2 30 2 33 13 3 133 133 13i i idt it dt t dz z i += - ++ = ++ = ∴ ?? ? + 3) 自原点沿虚轴至i ,再由i 沿水平方向向右至i +3。 解:连接自原点沿虚轴至i 的参数方程为:it z = 10≤≤t i d t dz = ()()31 31 20 2 3131i it idt it dz z i =??? ???== ? ? 连接自i 沿水平方向向右至i +3的参数方程为:i t z += 10≤≤t dt dz = () ()()33 1 31 2 32 3113131i i i t dt i t dz z i i -+=??????+=+= ?? + ()()33 3 3 32 2 30 2 13 13 113 13 1i i i i dz z dz z dz z i i i i += - ++ = + = ∴ ? ? ? ++ 2. 分别沿x y =与2 x y =算出积分()? ++i dz iy x 10 2 的值。 解:x y = ix x iy x +=+∴2 2 ()dx i dz +=∴1 ()()()()()??? ??++=? ???? ???? ??++=++=+∴ ? ?+i i x i x i dx ix x i dz iy x i 213112131111 0231 210 2 2 x y = ()2 2 2 2 1x i ix x iy x +=+=+∴ ()dx x i dz 21+=∴ ()()()()()? ???? ??++=????? ???? ??++=++=+∴ +1 1 0432 10 2 2131142311211i i x i x i dx x i x i dz iy x i 而()i i i i i 6 5 6121213131213 11+-=-++=??? ??+ +
思考题与习题 第3章
思考题与习题 3—1 试述变隙式电感传感器的结构、工作原理和输出特性。差动变隙式传感器有哪些优点? 3—2 为什么螺管式电感传感器比变隙式电感传感器有更大的位移范围? 3—3 如何提高螺管式电感传感器的线性度和灵敏度? 3—4 电感式传感器和差动变压器传感器的零点残余误差是怎样产生的?如何消除? 3—5 差动螺管式电感传感器与差动变压器传感器有哪些主要区别? 3—6 电感式传感器和差动变压器式传感器测量电路的主要任务是什么?变压器式电桥和带相敏检波的交流电桥,谁能更好地完成这一任务?为什么? 3—7 电感传感器测量的基本量是什么?请说明差动变压器加速度传感器和电感式压力传感器的基本原理? 3—8 差动变压器传感器的激励电压与频率应如何选择? 3—9 什么叫电涡流效应?什么叫线圈一导体系统? 3—10 概述高频反射式电涡流传感器的基本结构和工作原理?并说明为什么电涡流传感器也属于电感式传感器? 3—11 使用电涡流传感器测量位移或振幅时,对被测物体要考虑哪些因素?为什么? 3—12 电涡流的形成范围包括哪些内容?它们的主要特点是什么? 3—13 被测物体对电涡流传感器的灵敏度有何影响? 3—14 简述电涡流传感器三种测量电路(恒频调幅式、变频调幅式和调频式)的工作原理。 3—15 某差动螺管式电感传感器(参见图3-15)的结构参数为单个线圈匝数W=800匝,l=10mm,l c=6mm,r=5mm,r c=1mm,设实际应用中铁芯的相对磁导率μr=3000,试求: (1)在平衡状态下单个线圈的电感量L0=?及其电感灵敏度足K L=? (2)若将其接人变压器电桥,电源频率为1000Hz,电压E=1.8V,设电感线圈有效电阻可忽略,求该传感器灵敏度K。 (3)若要控制理论线性度在1%以内,最大量程为多少? 图3-15 差动螺管式电感传感器习题图3-16 3—16 有一只差动电感位移传感器,已知电源电U sr=4V,f=400Hz,传感器线圈铜电阻与电感量分别为R=40Ω,L= 30mH,用两只匹配电阻设计成四臂等阻抗电桥,如习题3—16图所示,试求: (1)匹配电阻R3和R4的值;
解析几何第四版吕林根课后习题答案第三章
第三章 平面与空间直线 § 平面的方程 1.求下列各平面的坐标式参数方程和一般方程: (1)通过点)1,1,3(1-M 和点)0,1,1(2-M 且平行于矢量}2,0,1{-的平面(2)通过点 )1,5,1(1-M 和)2,2,3(2-M 且垂直于xoy 坐标面的平面; (3)已知四点)3,1,5(A ,)2,6,1(B ,)4,0,5(C )6,0,4(D 。求通过直线AB 且平行于直线CD 的平面,并求通过直线AB 且与ABC ?平面垂直的平面。 解: (1)Θ }1,2,2{21--=M M ,又矢量}2,0,1{-平行于所求平面, 故所求的平面方程为: 一般方程为:07234=-+-z y x (2)由于平面垂直于xoy 面,所以它平行于z 轴,即}1,0,0{与所求的平面平行,又}3,7,2{21-=M M ,平行于所求的平面,所以要求的平面的参数方程为: 一般方程为:0)5(2)1(7=+--y x ,即01727=--y x 。 (3)(ⅰ)设平面π通过直线AB ,且平行于直线CD : }1,5,4{--=,}2,0,1{-= 从而π的参数方程为: 一般方程为:0745910=-++z y x 。 (ⅱ)设平面π'通过直线AB ,且垂直于ABC ?所在的平面 ∴ }1,5,4{--=AB , }1,1,1{4}4,4,4{}1,1,0{}1,5,4{==-?--=?AC AB 均与π'平行,所以π'的参数式方程为: 一般方程为:0232=--+z y x . 2.化一般方程为截距式与参数式:
042:=+-+z y x π. 解: π与三个坐标轴的交点为:)4,0,0(),0,20(),0,0,4(--, 所以,它的截距式方程为: 14 24=+-+-z y x . 又与所给平面方程平行的矢量为:}4,0,4{},0,2,4{-, ∴ 所求平面的参数式方程为: 3.证明矢量},,{Z Y X =平行与平面0=+++D Cz By Ax 的充要条件为: 0=++CZ BY AX . 证明: 不妨设0≠A , 则平面0=+++D Cz By Ax 的参数式方程为: 故其方位矢量为:}1,0,{},0,1,{A C A B --, 从而v 平行于平面0=+++D Cz By Ax 的充要条件为: ,}1,0,{},0,1,{A C A B -- 共面? ? 0=++CZ BY AX . 4. 已知连接两点),12,0(),5,10,3(z B A -的线段平行于平面0147=--+z y x ,求B 点的z 坐标. 解: Θ }5,2,3{z +-= 而平行于0147=--+z y x 由题3知:0)5(427)3(=+-?+?-z 从而18=z . 5. 求下列平面的一般方程. ⑴通过点()1,1,21-M 和()1,2,32-M 且分别平行于三坐标轴的三个平面; ⑵过点()4,2,3-M 且在x 轴和y 轴上截距分别为2-和3-的平面;
统计学第三章课后题及答案解析
第三章 一、单项选择题 1.统计整理的中心工作是() A.对原始资料进行审核B.编制统计表 C.统计汇总问题D.汇总资料的再审核 2.统计汇总要求资料具有() A.及时性B.正确性 C.全面性D.系统性 3.某连续变量分为五组:第一组为40—50,第二组为50—60,第三组为60—70,第四组为70—80,第五组为80以上,依习惯上规定() A.50在第一组,70在第四组B.60在第二组,80在第五组 C.70在第四组,80在第五组D.80在第四组,50在第二组 4.若数量标志的取值有限,且是为数不多的等差数值,宜编制() A.等距式分布数列B.单项式分布数列 C.开口式数列D.异距式数列 5.组距式分布数列多适用于() A.随机变量B.确定型变量 C.连续型变量D.离散型变量 6.向上累计次数表示截止到某一组为止() A.上限以下的累计次数B.下限以上的累计次数 C.各组分布的次数D.各组分布的频率 7.次数分布有朝数量大的一边偏尾,曲线高峰偏向数量小的方向,该分布曲线属于()A.正态分布曲线B.J型分布曲线 C.右偏分布曲线D.左偏分布曲线 8.划分连续变量的组限时,相临组的组限一般要() A.交叉B.不等 C.重叠D.间断 二、多项选择题 1.统计整理的基本内容主要包括() A.统计分组B.逻辑检查 C.数据录入D.统计汇总 E.制表打印 2.影响组距数列分布的要素有() A.组类B.组限 C.组距D.组中值 E.组数据 3.常见的频率分布类型主要有() A.钟型分布B.χ型分布 C.U型分布D.J型分布 E.F型分布 4.根据分组标志不同,分组数列可以分为() A.组距数列B.品质数列 C.单项数列D.变量数列 E.开口数列 5.下列变量一般是钟型分布的有()