west控制器用户手册

使用手册
目录
1................................................................................ 概述错误!未定义书签。
安装........................................................... 错误!未定义书签。
自动安装................................................... 错误!未定义书签。
程序和模块之间的数据连接....................................... 错误!未定义书签。
与模块的连接............................................... 错误!未定义书签。
识别模块................................................... 错误!未定义书签。
离线模式....................................................... 错误!未定义书签。
载入离线数据............................................... 错误!未定义书签。
保存离线数据............................................... 错误!未定义书签。
2................................................................................ 功能错误!未定义书签。
参数表(表格式输入)........................................... 错误!未定义书签。
参数输入................................................... 错误!未定义书签。
参数组..................................................... 错误!未定义书签。
显示器......................................................... 错误!未定义书签。
工艺参数................................................... 错误!未定义书签。
远程控制................................................... 错误!未定义书签。
状态信息................................................... 错误!未定义书签。
示波器......................................................... 错误!未定义书签。
光标功能................................................... 错误!未定义书签。
终端........................................................... 错误!未定义书签。
3............................................................................ 特殊功能错误!未定义书签。
保存/默认/回送................................................. 错误!未定义书签。
保存....................................................... 错误!未定义书签。
默认....................................................... 错误!未定义书签。
回送....................................................... 错误!未定义书签。
导入/导出...................................................... 错误!未定义书签。
固件更新(来自版本的对话框)................................. 错误!未定义书签。
启动固件更新............................................... 错误!未定义书签。
安全密钥组合............................................... 错误!未定义书签。
有效期..................................................... 错误!未定义书签。
固件更新(从传统版本到版)................................... 错误!未定义书签。
4................................................................................ 选项错误!未定义书签。
界面........................................................... 错误!未定义书签。
示波器......................................................... 错误!未定义书签。
显示器......................................................... 错误!未定义书签。
5........................................................................ 系统前提条件错误!未定义书签。
设置 Windows 延迟计时器(仅 USB 接口)......................... 错误!未定义书签。
6................................................................... 安装 USB 驱动程序错误!未定义书签。
7................................................................................ 备注错误!未定义书签。
备忘录/计划扩展:
1 概述
这个新版本主要关注表格式数据输入。也可以使用终端输入。可借助监控和示波器功能动态评估工艺变量。除了工艺变量之外,现在还可以显示各种其他状态信息。新增了远程控制功能,可从用户界面轻松地远程控制各模块。同时还整合了固件升级功能。
与我们的所有产品一样,本软件经过特殊设计,以确保简单操作,同时尽可能获得最高灵活性。
但是,我们仍欢迎您提出宝贵的改进意见和建议。
安装
可以人工或者自动安装程序,过程十分简单。
自动安装
如选择自动安装,您只需启动设置程序,剩下的过程将会自动进行,无需您操心。
程序和模块之间的数据连接
与模块的连接
首次启动程序时,必须选择模块已经与之连接的界面。可在连接按钮旁边的组合框中选择这一设置,或者在 Options(选项)对话框中的 Interface(界面)选项卡上选择。设置自动保存在程序的 .ini 文件中,只需要在有必要时修改。
基本上,模块和程序之间的通讯有两种工作模式。
采用固定波特率的工作模式
这种工作模式预设为默认模式。在这种工作模式中,程序按照 Options(选项)对话框中定义的波特率工作(默认值:9600 波特)。按 Connect(连接)按钮将发出连接信号。然后 Connect(连接)按钮图标发生变化,程序状态栏上显示文本“connected(已连接)”和波特率。ID 按钮被激活。
意!
即使已发出连接信号,也并不意味着实际存在着与模块的工作连接。在这种工
作模式中,这只意味着个人计算机上设定的串行界面已经打开。
采用自动波特率感应的工作模式
当采用自动波特率感应工作时,一旦按下 Connect (连接)按钮,程序就会尝试着自动感应模块的波特率。只有成功,Connect (连接)按钮图标才会发生变化,且状态栏上显示“connected (已连接)”和感应到的波特率。只有这样才会释放 ID 按钮。
在这种工作模式下,还有一个选项,即选择波特率自动切换。成功识别波特率之后,程序尝试将模块切换到设定的波特率。可以在 Options (选项)对话框中设置此选项和相关波特率。
注意!
并非所有模块都支持波特率自动切换。还应该注意的是,在重启模块之后,模块将再次以默认波特率工作(9600 波特)。如果在与程序连接时模块关闭并再次启动,那么程序可能无法感知模块侧可能出现的波特率变化。这就意味着通讯无法继续。如要纠正这一点,必须重新连接程序。(断开程序,然后重新连接。)
采用半双工模式工作
在这种工作模式中,通讯的发送与接收交替进行。在全双工模式下,可同时进行发送和接收。在半双工模式下,波特率固定设置为 19200 波特,不能改变。在半双工模式下无法进行波特率自动感应和切换,Options (选项)对话框上对应的设置被禁用。
注意!
一般情况下,通讯采用全双工模式。半双工模式专用于集成阀门电子元件。这个电子元件带有用于通讯的 LIN 总线。所有其他模块只支持全双工模式。如果设置错误就不可能进行通讯。
识别模块
只有模块与程序之间存在连接才能识别模块。在识别模块时,将读取模块 ID 、参数结构和所有参数值。这对于正确地初始化各个功能(参数表、显示器、远程控制、状态显示、示波器),同时根据所连接模块的功能调整程序,是有必要的。参数表、显示器和示波器功能也是在成功识别之后才可用。否则,相关功能按钮被禁用。
识别之后,状态栏上将显示各自的模块 ID 。
注意!
并非所有模块都支持远程控制和状态显示功能。显示器上显示的内容根据所连接模块的功能进行动态调整。因此,相关显示区域可能没有内容。
离线模式
离线模式让用户无需连接模块就可以载入、编辑和保存模块参数。对于这些参数文件,执行带有文
件扩展名 *.wpc 的新数据格式。
在创建新参数文件之前,模块已经一次性连接。在这之后,新的参数文件也可以离线编辑。一般可以将不同模块的参数保存在同一个文件中。
示波器和显示器不以离线模式运行。这些功能只可以选择用于可用工艺参数和状态字节的概览。
载入离线数据
通过选择子菜单项目“Load offline data(载入离线数据)”,可以启动离线数据载入。该子菜
单项目位于主菜单中的“File(文件)”下面。离线数据载入只有在模块没有连接的情况下才可以使用。在其他情况下,该子菜单项目被禁用。
如果参数文件包括来自不同模块的数据,那么将自动显示一个选择对话框。
保存离线数据
通过选择子菜单项目“Save offline data(保存离线数据)”,可以启动离线数据保存。该子菜单项目位于主菜单中的“File(文件)”下面。如果模块已连接并且识别或者离线数据已经载入,通常可以成功保存。也可以将不同模块的数据保存在同一个文件中。如果所选文件已包含来自当前模块的数据,那么这些数据将在安全性询问后被覆盖。在其他情况下,新数据将被添加到文件中,所有其它已存在的模块数据不会更改。
此外,可以通过导入功能保存离线参数。(见节“导入/导出”)
2 功能
参数表(表格式输入)
当启动程序时,默认显示参数表。参数表提供最简单的模块参数化方式,同时也是终端输入的一种替代方式。当识别到所连接的模块时,读出命令结构和参数。如果没有识别到模块,表格为空。
某些模块处理受密码保护的参数。只有先输入有效的密码,才可以在表格中看到这些参数。在打开的工具面板上按下密码按钮,即可在特定对话框中输入密码。只有存在密码保护参数,该密码按钮才可用。
输入表格旁边的其他按钮见“特殊功能”一节。
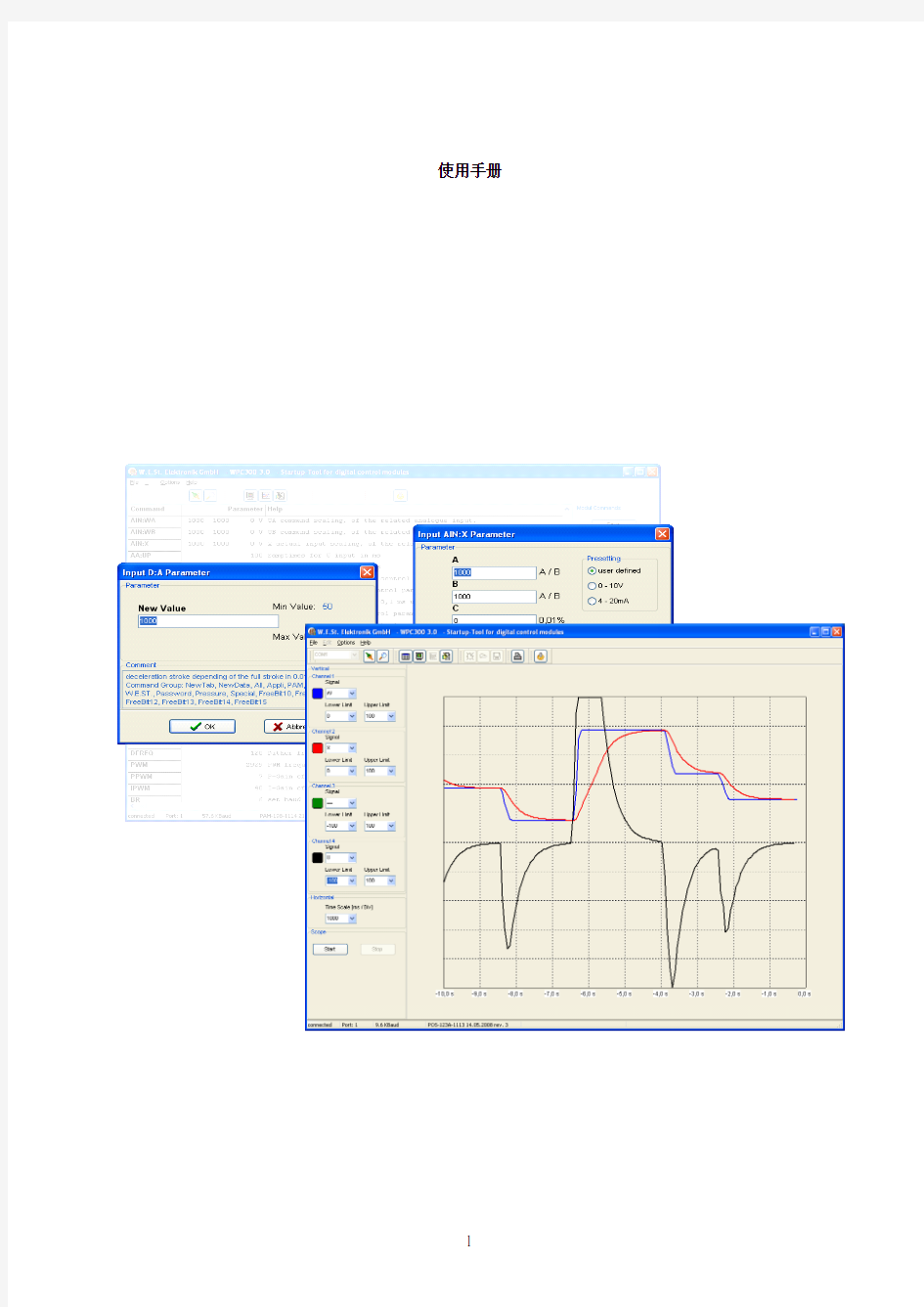
下图显示了参数表的结构。
参数输入
在特殊输入对话框中输入参数。当用鼠标双击选定的参数栏时,输入对话框会自动打开。出现的对话框取决于参数类型。对话框将监控输入是否正确。数字参数还设定了限值。
说明栏显示参数的简短描述,帮助输入正确参数。
数字参数对话框
参数以数字形式输入。显示相关限值。
文本参数对话框
从组合框中选择可能的参数。
AIN 参数对话框
AIN 命令是缩放输入信号的特殊命令。输入信号用过线性方程转换。用参数 A 和 B 设置放大比例,用参数 C 设置便宜。参数 X 将输入定义为电流或者电压输入(V = 电压,C = 电流)。
为了为用户简化线性方程的参数计算,输入项可在“Presettings(预设)”中定义为 0-10V/4-20mA 界面。然后,相应的输入栏会自动填上值并被禁用。
在模块文件中可以看到相关 AIN 命令设置的描述。
CC 参数对话框
使用 CC 命令,可以将输出信号线性化。默认输出信号为线性的,从 1 开始上升。这意味着输出信
号不会改变。对应的 V 值是连续的线,从 CC:-10 x=-10000; y=-10000 增加到 CC:10 x=10000;
y=10000。
基本上,所有用户自定义信号曲线都是可能的。有两种方式改变信号点的值。第一种方式是直接在表
格中输入 x 和 y 的值。第二种方式是图像方法。图像上的所有信号点都可以用鼠标移动。在这两种情况下,数据查看自动同步。
通过按鼠标左键移动信号点。如要选择一个信号点,需要将鼠标指针移动靠近信号点。
对于信号点的定义,有两个限制,输入对话框将防止出现这两种情况。
1) 对于所有 x 值有效:CC:i-1 X Val < CC:i X Val < CC:i+1 X Val
2) 其他:CC:-10 X=-10000 以及 CC:10 X=10000
参数组
当前版本支持参数组。使用参数分组,可以清楚地显示。此外,如果需要的话,可以隐藏不必要的参数。更改某些参数可能使其他参数成为不必要参数,因此将其隐藏。
更改某些参数也可能意味着其他参数的值也会发生改变。比如,时间范例就是这样的一个参数。如果其发生改变,那么所有其他时间参数也会发生改变。因此,参数分组可更加有效地使用参数表,使参数表动态地适应于所连接的模块。
只有从版本 *20 以上的最新代模块才支持参数组。对于较老的模块,没有任
何改变。所有参数都按往常显示。
与以前版本相比,显示器发生了重大改变。显示器外观取决于所连接的模块,现在显示器细分为三个不同的显示区域(工艺参数、远程控制、状态信息)。显示器全部显示内容以 250ms 的取样速度持续更新。
注意!
并非所有模块都支持远程控制和状态显示功能(只有 *20 以上版本才支持所有功能)。因此,相关显示区域可能没有内容。
工艺参数显示在程序的左侧区域内。所显示的参数数量可以调整。默认显示四个参数(假定所连接的模块提供四个或者更多工艺参数)。
在 Options(选项)对话框中,有各种设置选项用于显示工艺参数(见“Options(选项)”)。
远程控制
远程控制信息显示在程序的右上区域。显示内容分为模拟输入和数字输入/输出区域。远程控制功能用“Enable Remote Control(激活远程控制)”复选框来激活。(注意:只有模块支持远程控制功能,才有可能激活。)如果远程控制功能被禁用并在连接模块中执行,那么相关显示和运行组件只作为状态信息,无法更改。
模拟输入
可用的模拟参考值输入数量取决于所连接的模块。相关运行组件(编辑栏)用模块相应的终端名称来标注,以便能够借助框图来轻松识别输入。
如要更改一个值,那么必须激活所需的输入栏。可通过双击鼠标右键或者点击相关输入栏的 ENTER 键来实现。在激活之后,输入栏以彩色显示。下面的滑动块也被激活。现在可采用直接输入数字或者通过滑动块来更改。
注意!
只有第二次按 ENTER 键之后才能使直接数字输入生效。这会再次禁用输入栏。而使用滑动块做出的更改则立即生效。
当转移到另一个输入组件或者再次按活动输入栏中的 ENTER 键时,输入完成。
数字输入和输出
数字输入/输出状态只有在远程控制功能激活的情况下才可更改。输入/输出名称参照模块的终端。并不是所有输入/输出都会出现,视所连接的模块而定,尽管会显示。出于向下兼容性的原因,这是必要的。终端的详细配置可从各自模块的框图中查看。
状态信息
状态信息以 LED 形式显示在显示器右下显示区域内。状态 LED 的数量取决于所连接的模块。
基本上,LED 分为三个不同的类别。绿色 LED 表示待机信息,黄色 LED 提供状态信息,红色
LED 为错误信息。作为额外辅助方式,当鼠标移动到 LED 或其名称上,会出现小的黄色帮助文本。
示波器
按工具面板上的示波器按钮可使示波器显示出来。
新版本的示波器也已经大大改进。可同时显示至多四个信号。信号质量已经进一步提高。根据所连接模块以及波特率设定,最高可实现 10ms 的取样速度。图像每 250ms 更新一次。
可对每个通道在 -100 到 5000 范围内独立设置垂直比例缩放(对于整个显示区域 (10 个 DIV))。
横向比例缩放将同时改变所有通道,可在每个 DIV 可在 100ms 到 10000ms 的范围内设置(整个显示区域内 1 秒到 100 秒)。
使用启动和停止按钮来启动和停止记录。
如有必要,可以将当前示波器图像复制到剪贴板,以便进一步编辑。“Copy Scope Display(复制范围显示)”菜单项必须从弹出菜单中选择。(如要打开弹出菜单,在鼠标指针位于示波器格栅范围内时点击鼠标右键。)示波器图像可打印出来,用于编制文件。光标坐标、通道关键值以及比例值也会同时打印。点击工具面板上的打印按钮开始打印。
可以在示波器选项卡的 Options(选项)对话框中进行各种设置,以根据个人喜好调整示波器外
观。这些设置保存在程序的 .ini 文件中,因此可以在程序启动之后采用。
光标功能
新程序中的示波器拥有光标功能,可以垂直和横向测量各个信号。
在单独的对话框中激活此功能。当从弹出菜单中选则相应的菜单项时,将会打开单独的对话框。(在鼠标指针位于示波器格栅范围内时点击鼠标右键。)
横向(时间)和垂直(幅度)光标可针对每个通道单独打开或者关闭。程序状态栏上显示光标位置和相关差值,视设置而定。
通过拉动鼠标来移动光标。首先用鼠标指针点到光标上,然后按住鼠标左键,即可拖动。
终端
按下工具面板上的终端输入按钮,可以进入终端输入。只要连接有模块,基本上就可以进行终端
输入。与表格输入和显示器和示波器功能不同的是,这次不必提前识别模块。
在终端操作中,可以向模块发送简单命令。模块基本上采用信息反馈的方式工作。这就意味着终端窗口上只显示模块发送回来的文本,但是不显示输入。这样可以轻易地测试与已连接模块之间的连接。如果在终端窗口的字符输入之后没有出现输出,这就表示程序与模块之间存在连接问题。
模块参数化通过输入命令以及命令参数来实现。通过按 ENTER 按钮来确认命令,并在模块侧执行。新值立即激活。
命令分为三类。
1. 无参数的命令:这些是直接命令,比如SAVE(保存)、LOADBACK(回送)或者
DEFAULT(默认)。这些特殊命令也可通过终端送入和参数表附近的功能按钮局部实现。详细描述见“特殊功能”一节。
2. 带参数的命令:这里,除了命令之外,还通过一个值。某些性能通过这些命令来编程
设置。比如:POL +(正极性)、OFFSET 27(编程设置 % 偏移)。
3. 带参数的索引命令1:这些命令为命令组。通过各自索引来定义相应命令。索引可以是一个数字,也可以是文本,视命令而定。通过这种索引,可以更好地处理同属性的参数项。例如:MIN:A 500 和 MIN:B 600(偏移量可以根据方向通过指数 A 或者 B 来设置)。
如果参数命令(包括索引命令)没有输入相关参数并且按 ENTER 键确认了,那么这将视为读命令。相关值在终端窗口读出。
注意!
更改的参数不会自动保存在模块内。要永久保存输入内容,必须执行特殊“Save (保存)”命令。具体描述见“特殊功能”一节。
另外,还可以删除、保存和打印终端窗口的内容。也可以在终端窗口再次显示以前保存的终端内容。终端内容以 RTF 格式保存,使文件能够用 Word 等文字处理程序编辑。功能通过工具栏上的按钮选择。
注意!
表格式输入比终端输入(见参数表)更简单也更安全。前者对输入错误和数字限值进行监控,并自动更新实际值。只有几个特殊功能才需要用到终端,比如固件更新。
1
在命令表中,i 是索引值的占位符。
3 特殊功能
保存/默认/回送
可通过按相应的功能按钮来执行这些特殊功能键。这些功能键位于终端输入附近或者表格输入附近。或者,也可在终端直接输入这些命令。
保存
SAVE(保存)命令将参数永久保存于模块的 EEPROM 中。这意味着保存的值不受电源关断影响。
默认
DEFAULT(默认)命令将所有参数设置回到原来的工作设置。
注意:参数不会自动保存。
回送
LOADBACK(回送)命令将所有参数设置为保存在 EEPROM 中的值,也就是以前用 SAVE 命令保存在EEPROM 中的值。如果没有保存任何内容,那么 EEPROM 值相当于 DEFAULT(默认)设置。
导入/导出
导入和导出功能也可通过特殊功能按钮调用。这些功能位于终端输入和表格输入的旁边。在以前版本中,各自的功能按钮标识为 PCto 和 ToPC。
借助于导入功能,可以将参数记录从模块导入,并以参数文件保存在个人计算机上。比如,如果几个模块使用相同设置的话,这将十分方便。在按 Import(导入)按钮之后,自动打开一个对话框,其中可以定义文件名和保存位置。文件自动接收到 *.par 扩展名。
导出功能是导入功能的补充。这里,参数记录从个人计算机上的参数文件载入,然后导出到模块上。按下 Export(导出)按钮将打开一个对话框,然后在其中选择参数文件。选择参数文件之后,执行兼容性检查。已连接模块的模块 ID 必须与保存在参数文件中的模块 ID 相同。只允许出现修订号和修订日期的偏离。如果不相同,就会出现错误信息。
注意!
在参数化过程中将再次执行检错。参数文件中命令有问题对模块侧没有影响。在软件修订版本不同时,应特别注意。这里参数数量可能会有差异。参数文件中可能还没有新命令。
控制器编程软件说明书
CP Customer Center China希贝动力工具中国客户中心上海市南京西路819号中创大厦1108室20041电话: +86 (021) 6215 3587 传真: +86 (021) 6258 7038 CVIPC2000 操作手册
CP Customer Center China希贝动力工具中国客户中心上海市南京西路819号中创大厦1108室20041电话: +86 (021) 6215 3587 传真: +86 (021) 6258 7038 目录表 1简介 1.1传输方式和命令方式 1.2 “点到点”连接和“多点”连接 1.3 安装 1.3.1 硬件和软件要求 1.3.2 CVIPC 软件保护 1.3.3 安装 1.3.4 升级控制器软件 1.3.5 卸载 1.3.6升级CVIPC 软件 1.4起动程序 2.创建一个站点 2.1 创建 2.2 复制一个站点
CP Customer Center China希贝动力工具中国客户中心上海市南京西路819号中创大厦1108室20041电话: +86 (021) 6215 3587 传真: +86 (021) 6258 7038 2.3 删除一个站点 3.参数 3.1 控制器 3.1.1串口RSA和RSB RSA口 RSB 口 3.1.2 连接以太网 3.1.3 外设 报告输出 条形码 标签打印机 遥控显示 3.2 笔记本 3.3 拧紧轴 3.4 拧紧周期 3.4.1加一个周期 3.4.2加一个相 3.4.3删除 3.4.4 复制
CP Customer Center China希贝动力工具中国客户中心上海市南京西路819号中创大厦1108室20041电话: +86 (021) 6215 3587 传真: +86 (021) 6258 7038 3.4.5 粘贴 3.4.6灵敏度系数 3.4.7 主要参数 3.4.8 相类型 3.4.9指令 3.4.9.1 寻帽相 3.4.9.2 快速旋转相 3.4.9.3 最终拧紧相 3.4.9.4 反转相 3.4.9.5 拧紧结果不合格时所采取的动作相 3.4.9.6 用残余扭矩法的相 3.4.9.7 同步等候相 3.4.9.8 跳转相 3.4.10 拧紧轴清单 3.5 曲线 4 结果 4.1 拧紧 4.1.1显示 4.1.2 打印 以PC4格式的详情报告码
简易单轴运动控制器使用说明书
简易单轴运动控制器使用说明书 该款简易单轴运动控制器SAMC(Simple Axis Motion Controller)不需编程,提供多种运动方式:单向单次、往返单次、单向连续、往返连续,自动回原点等,参数设置合理简单,工作中实时显示位置状态,适用于单轴步进电机的各种场合控制应用,如自动送料、自动冲床、自动剪板机、器件编带、商标印刷、切标机、切带机、化妆品封尾等。 一、性能指标: 1.输出脉冲频率:20KHz。 2.位置最大设置值999900脉冲。 3.速度最小设置值100Hz、加速度最小设置值100Hz/s。 二、电气特性: 1.工作电源:DC24V。 2.输入检测口:5V开关信号(IO1\IO2\IO3\IO4,TTL电平)。 3.输出控制口:P+、P-、D+、D-、E+、E-都是差分输出,当用作单端时,可利用Vcc(+5V)与P+、D+、E+配合使用。 三、使用操作说明 控制器底端有六个按键,分别是MODE、SET、SHIFT、UP、RUN、STOP分别表示模式、设定、移位、上加、运行、停止。控制器通电(24V)以后,数码管全部显示零。1.位移设定 按下MODE键,则显示1,表示位移设定模式,如需进入该模式,则按下SET键,此时百位闪烁(位移、速度、加速度的设置值规定都是100的整数倍,所以位移、速度、加速度都是从百位开始设置),每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT 键,则千位开始闪烁,同样方法完成各位设置。当位移值设定好以后,则再次按下SET键,此时设定的位移值成功被CPU读取。位移初始默认值是40000。 2.最大速度设定 再次按下MODE键,则显示2,表示最大速度设定模式,最大速度表示位移进给过程中最大进给速度,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当最大速度设定好以后,则再次按下SET键,此时设定的最大速度成功被CPU读取。最大速度初始默认值是4000。 3.加速度设定 再次按下MODE键,则显示3,表示加速度设定模式,该值表示位移进给过程中电机按此加速度加速到最大速度或者减速到零,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当加速度设定好以后,则再次按下SET键,此时设定的加速度成功被CPU读取。最大加速度初始默认值是4000。 4. 两次运行间隔时间设定 再次按下MODE键,则显示4,表示两次运行间隔时间设定模式,如需进入该模式,则按下SET键,此时个位闪烁,每按下一次UP键、数字显示增加1(1表示两次运行过程中间隔时间是1秒,如果该位不设置则默认为1秒),如果两次运行中间间隔时间较长、则按下SHIFT键,设置十位,设置完成后再次按下SET键,此时设定的连续运行停留时间被CPU读取。注:最大停留时间最大是99秒。
汇川控制器操作手册
电动车驱动器用户手册 深圳市汇川技术股份有限公司
前言 IEVD030系列电动车驱动器用户手册
目录 前言 (1) 第1章安全信息及注意事项 (8) 1.1 安全事项 (8) 1.2 注意事项 (10) 1.3 环境要求和存储、运输特性 (11) 第2章产品信息 (14) 2.1 电机控制器特色功能介绍 (14) 2.2 命名规则 (16) 2.3 铭牌 (16) 2.4 IEVD系列电机控制器规格 (17) 2.5 技术规范 (18) 2.6 选型指导 (19) 2.7 选配件 (20) 第3章机械与电气安装 (22) 3.1 机械安装 (22) 3.2 电气安装 (23) 第4章电气设计 (30) 4.1 IEVD系列电机控制器工作原理简介 (30) 4.2 纯电动汽车端子控制方式电气设计方案 (31) 4.3 纯电动汽车通讯控制方式电气设计方案 (34) 4.4 辅助动力控制电气设计方案 (36) 第5章调试说明 (40) 5.1 首次匹配台架标定 (40) 5.2 纯电动汽车端子控制方式调试说明 (42) 5.3 纯电动汽车通讯控制方式调试说明 (43) 5.4 辅助动力控制调试说明 (44) 第6章外引键盘的操作与显示 (46) 6.1 操作与显示界面介绍 (46) 6.2 功能码查看、修改方法说明 (47) 6.3 切换菜单模式的操作方式 (48) 6.4 电机控制器功能码的组织方式 (49) 6.5 多功能按键的定义与操作 (49) 6.6 状态参数的查阅 (49) 6.7 密码设置 (51)
6.8 电机参数自动调谐 (51) 第7章维护保养与故障诊断 (54) 7.1 维护与保养 (54) 7.2 故障诊断及对策 (55) 7.3 常见故障及其处理方法 (59) 第8章功能参数表 (62) 第9章参数说明 (84) A0组系统基本参数 (84) B0组常用功能参数 (84) B1组电机参数 (90) B2组矢量控制参数 (92) B4组数字量输入端子 (94) B5组模拟量输入端子 (99) B6组数字量输出端子 (102) B7组模拟量输出端子 (106) BA组故障与保护 (107) C4组同步机控制参数 (112) D3组控制优化参数 (113) D4组转矩控制参数 (115) D5组辅助功能参数 (115) DE组功能码管理 (116) 附录A CAN通讯协议 (122) A.1 系统拓扑结构 (122) A.2 网络硬件规范 (122) A.3 网络协议说明 (122) A.4网络报文结构 (123) A.5通讯协议 (123) 附录B 版本变更记录 (126)
发电机使用维护手册
P550E 发电机组维护手册 发动机2800系列控制板2001 1.简介 .发电机技术操作及维修保养手册 1.本发电机组是设计为重工业用途,并在设计上考虑了机组安放后只需注入水 /冷却液,燃料及电池液便即可以准备运行。多年的柴油发电机设计及生产经验使本机能提供高效率及稳定的高质素电源。本技术操作及维修保养手册为用户提供保养及操作之方法。利用本手册并配合柴油机手册,交流发电机手册及操操作作人员手册同时参照使用,可确保发电机能长期地提供高效率运作。请注意,如在肮脏或多尘的环境使用本机组,应勤加保养以确保机器能正常运作。要确保由经受专业训练之人士来对本机进行调校及维修。基本每一台机组发电机外壳上钉有一块名牌,在名牌上刻独有的机组型号及机身编号。在需要订购备用零件或保修服务时,就需要提供上述号码,关于这一点,将在第3章一节作进一步说明。 24-00-01
General information Lntroduction The 2806 diesel engine is the latest development from perkins Engines Company Limited,a qorld leader in the design and manufacture of high performance diesel engines.More than fifty years of diesel production experience,together qith the use of the latest technology,have been used in the manufacture of your engine to give you rdliable and econkmic power. To ensure that you use the relevant information for your specific engine type, refer to“Engine identificationn page 5. The terms“left side ”and“right stide”apply when the engine is seen from the rear end,the flywheel end. Number one cylinder is at the front end of the engine Danger is indicated in the text by two methods: Warning! This indicates that there is a possible danger to the person. Caution:Thisindicates that there is a possible danger to the engine. Note:Is used where the information is important,but there is not a danger. 24-00-02
west控制器用户手册
__________________________________________________ 使用手册
目录
备忘录/计划扩展:
1 概述 这个新版本主要关注表格式数据输入。也可以使用终端输入。可借助监控和示波器功能动态评估工艺变量。除了工艺变量之外,现在还可以显示各种其他状态信息。新增了远程控制功能,可从用户界面轻松地远程控制各模块。同时还整合了固件升级功能。 与我们的所有产品一样,本软件经过特殊设计,以确保简单操作,同时尽可能获得最高灵活性。 但是,我们仍欢迎您提出宝贵的改进意见和建议。 1.1 安装 可以人工或者自动安装程序,过程十分简单。 1.1.1 自动安装 如选择自动安装,您只需启动设置程序,剩下的过程将会自动进行,无需您操心。
1.2 程序和模块之间的数据连接 1.2.1 与模块的连接 首次启动程序时,必须选择模块已经与之连接的界面。可在连接按钮旁边的组合框中选择这一设置,或者在 Options(选项)对话框中的 Interface(界面)选项卡上选择。设置自动保存在程序的 .ini 文件中,只需要在有必要时修改。 基本上,模块和程序之间的通讯有两种工作模式。 1.2.1.1 采用固定波特率的工作模式 这种工作模式预设为默认模式。在这种工作模式中,程序按照 Options(选项)对话框中定义的波特率工作(默认值:9600 波特)。按 Connect(连接)按钮将发出连接信号。然后 Connect(连接)按钮图标发生变化,程序状态栏上显示文本“connected(已连接)”和波特率。ID 按钮被激活。 即使已发出连接信号,也并不意味着实际存在着与模块的工作连接。在这种工作模 式中,这只意味着个人计算机上设定的串行界面已经打开。
电动汽车整车控制器功能结构说明
新能源汽车整车控制器系统结构 和功能说明书 新能源汽车作为一种绿色的运输工具在环保、节能以及驾驶性能等方面具有诸多内燃机汽车无法比拟的优点,其是由多个子系统构成的一个复杂系统,主要包括电池、电机、制动等动力系统以及其它附件(如图1所示)。各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配,这项任务需要由控制系统中的整车控制器来完成。基于总线的分布式控制网络是使众多子系统实现协同控制的理想途径。由于CAN总线具有造价低廉、传输速率高、安全性可靠性高、纠错能力强和实时性好等优点,己广泛应用于中、低价位汽车的实时分布式控制网络。随着越来越多的汽车制造厂家采用CAN协议,CAN逐渐成为通用标准。采用总线网络可大大减少各设备间的连接信号线束,并提高系统监控水平。另外,在不减少其可靠性前提下,可以很方便地增加新的控制单元,拓展网络系统功能。 新能源汽车控制系统硬件框架 整车控制器电机控制器仪表ECU电池管理系统车载充电机MCU 外围 电路信号 调理 电路功率 驱动 电路电源 电路通讯 电路
图1新能源汽车控制系统硬件框架 一、整车控制器控制系统结构 公司自行设计开发的新能源汽车整车控制器包括微控制器、模拟量输入和输出、开关量调理、继电器驱动、高速CAN总线接口、电源等模块。整车控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。该整车控制器采集司机驾驶信号,通过CAN总线获得电机和电池系统的相关信息,进行分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动回馈控制。该整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。 其结构原理如图2所示。 电源模块 CAN 加速踏板传感器 制动踏板传感器模 拟 量 调 理微 控 制 器光 电
SEL控制器软件用户手册(基础)
前言 本书主要讲述以下程序的基本操作方法。 ①单轴的移动 ②3轴的同時移动 ③重复移动 ④移动中的暂时停止 ⑤根据输入信号的ON/OFF,轴移动的有効/无効 ⑥轴移动完了后开启输出信号 ⑦设定区域输出 注意 由于在实际操作中会会使用到电气,具有一定的危险性,所以请遵守以下注意事项。 ?接线时一定要听从讲师的指挥,在他说「请将电源接头接入电源插座。」之前,请绝对不要给任何机器接上电源。 ?如不听从讲师的指示随意操作,机械手可能会做预想以外的动作,这是非常危险的,所以请一定遵照讲师的指示一步一步,老老实实的操作。
目录 1.绝对归零(X-SEL) (3) 2.试运行(运行程序例) (3) 3.输入位置数据 (3) 4.制作运转程序 (12) 5.输出区域信号 (35)
1.绝对归零(DS3轴) 如是DS3轴的话,请根据X-SEL J/K型号的说明书进行绝对归零。在这个操作之后即使是关闭电源的重启也无须再作绝对归零。 由于TT是增量样式,虽然无需做绝对归零,但程序须要在开始时做原点恢复。之后只要不关闭电源,原点恢复就只须做此一次就行。 2.试运行(运行程序例) (1)请将切换程序的数据开关拨到「01」位置。 (2)然后将功能按钮(开始按钮)拨到ON。 (3)可以认为驱动轴已经开始进行画图。 TT的话,用切换程序的数据开关来指定程序No。,使程序在开始按钮拨到ON时就能实行。 【DS3轴】 (1)将I/O检验速断开关的「IN7」拨到ON。 (2)再将速断开关的「IN0」拨到ON。 (3)可以认为驱动轴已经开始进行画图。 X-SEL的话,可以从外部指定程序No。,使开始信号一输入程序就能实行。(出厂时的标 准设定) ※速断开关「IN7」为选择程序No.键,速断开关「IN0」为信号开始键。 3.输入位置数据 (1)输入位置数据。 请双击(鼠标左键)「位置」
30303479 GST-5000火灾报警控制系统软件用户手册Ver1.01,2006.04 F2.480.028YC用户手册
GST-5000火灾报警控制系统软件 用户手册 (Ver 1.01,2006.04) 海湾安全技术有限公司
目录 第1章系统简介 (1) 1.1系统特点 (1) 1.2系统配置 (1) 1.2.1 软件环境 (1) 1.2.2 硬件环境 (1) 第2章系统的安装及卸载 (2) 2.1安装程序 (2) 2.2执行程序 (4) 2.3卸载程序 (4) 第3章用户使用说明 (6) 3.1概述 (6) 3.2用户操作步骤及说明 (7) 3.2.1 标准工具条 (7) 3.2.2 系统导航操作列表 (10) 3.2.3 控制器操作 (11) 3.2.4 分区定义 (12) 3.2.5 回路设备配置 (13) 3.2.6 联动公式配置 (15) 3.2.7 回路计算 (18) 3.2.8 实时操作 (20) 3.2.9 报表系统 (21) 第4章操作流程图 (23)
第1章系统简介 1.1 系统特点 GST-5000火灾报警控制系统是新一代海湾消防控制系统,它的主要功能是用于调试和配置及控制海湾消防设备。系统在整体上界面美观、大方、人机界面友好, 功能完备,操作灵活,可与海湾集团公司所生产的GST5000火灾报警控制器(联动型)通讯,可将回路设备、手动盘设备、联动公式等进行定义,并将这些定义信息下载到控制器或从控制器上传至本系统中,从而大大简化了消防系统的工程调试工作,方便现场调试人员进行工程定义及诊断。它主要具有以下主要功能: ●定义系统中的控制器 ●定义控制器的回路 ●定义控制器的联动公式 ●定义手动盘 ●定义回路设备 ●定义防火分区 ●对定义信息的上传下载 ●软件与控制器的通讯测试 ●设备实时操作 ●回路计算 ●报表系统 1.2 系统配置 1.2.1软件环境 操作系统:Win98,Win2000,WinXP 1.2.2硬件环境 ●内存:256M以上 ●CPU:PIII 1G以上 ●硬盘:2G以上
单轴控制器使用手册
单轴运动控制器操作手册 目录 一与外部驱动器及IO(输入输出)接线图 (4) 二用户管理操作 (5) 三系统参数设置 (6) 四IO(输入输出)设置 (7) 五系统自检操作 (10) 六手动操作 (12) 七编程操作 (14)
八自动执行 (17) 九指令详解 (18) 十电子齿轮计算及公式 (20) 十一编程案例 (23) 十二常见问题及处理 (28)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线)
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。二用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内
容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。 三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分两屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
west控制器用户手册范本
.. .. 使用手册
目录 1概述 (6) 1.1 安装 (6) 1.1.1 自动安装 (6) 1.2 程序和模块之间的数据连接 (7) 1.2.1 与模块的连接 (7) 1.2.2 识别模块 (8) 1.3 离线模式 (9) 1.3.1 载入离线数据 (9) 1.3.2 保存离线数据 (9) 2功能 (10) 2.1 参数表(表格式输入) (10) 2.1.1 参数输入 (11) 2.1.2 参数组 (14) 2.2 显示器 (15) 2.2.1 工艺参数 (16) 2.2.2 远程控制 (16) 2.2.3 状态信息 (16) 2.3 示波器 (17) 2.3.1 光标功能 (18) 2.4 终端 (19) 3特殊功能 (21) 3.1 保存/默认/回送 (21) 3.1.1 保存 (21) 3.1.2 默认 (21) 3.1.3 回送 (21) 3.2 导入/导出 (21) 3.3 固件更新(来自 3.2 版本的对话框) (22) 3.3.1 启动固件更新 (22) 3.3.2 安全密钥组合 (22) 3.3.3 有效期 (23) 3.4 固件更新(从传统版本到 3.1 版) (23) 4选项 (26) 4.1 界面 (26) 4.2 示波器 (28) 4.3 显示器 (29) 5系统前提条件 (30) 5.1 设置 Windows 延迟计时器(仅 USB 接口) (30) 6安装 USB 驱动程序 (32) 7备注 (38)
备忘录/计划扩展:
1 概述 这个新版本主要关注表格式数据输入。也可以使用终端输入。可借助监控和示波器功能动态评估工艺变量。除了工艺变量之外,现在还可以显示各种其他状态信息。新增了远程控制功能,可从用户界面轻松地远程控制各模块。同时还整合了固件升级功能。 与我们的所有产品一样,本软件经过特殊设计,以确保简单操作,同时尽可能获得最高灵活性。 但是,我们仍欢迎您提出宝贵的改进意见和建议。 1.1 安装 可以人工或者自动安装程序,过程十分简单。 1.1.1 自动安装 如选择自动安装,您只需启动设置程序,剩下的过程将会自动进行,无需您操心。
超静音智能型无刷电动车控制器接线说明
、超静音智能型无刷电动车控制器接线说明: 1、电源线为6.3-3AY三根线,红,红,黑。接48v电压。 2、电机线为黄,绿,蓝三根线,一般情况是相应的颜色接相应的线,如果转的声音很大,可以把这三根线调换位置接一下。 3、霍尔信号线为2.8-6AY五根线,一般情况是相应的颜色接相应的线。红,黑,黄,绿,蓝。 4、反相充电为2.8-2AY二根线,红,黑。 5、调速线为sm-3AY三根线,红,黑,灰。 6、1:1助力线为sm-3AY三根线,红,黑,绿。 8、刹车线为sm-2AY二根线,黑,紫。 7、巡航线相当于转把线sm-2AY二根线,红,黑。 9、限速线为二根单独的白色线,当把这二根线接上时,无论转把转的位置多大,速度也不会变快,保持一定速度。 10、 ABS为二根单独的绿色线,当把这二根线接上时,按下刹车,电动自行车的电机马上停转,如果不接,滑行时按下刹车,由于惯性,会向前滑行一段距离。 首先电动车要转起来,基本的连线就是电机相线(三根线:黄、绿、蓝)接上控制相线(三根线:黄、绿、蓝)、电机霍尔线(五根线:红、黑、黄、绿、蓝)接上控制器霍尔线(五根线:红、黑、黄、绿、蓝),电池(两根线加AAC线:红、红、黑)接上控制器的电源端子(两根线加AAC线:红、红、黑),调速把接控制器的调速端子,接好这四个基本连线(还要考虑相序问题),就可以转起来了。 另外还有助力线(三根:红、黑、白),限速端子等。其他的功能线可以通过合端子分辩出来。深圳市士金技术的电动车检修匹配仪可以用来检修和帮助接线。1分20秒可以从36种接法中选出最佳接线方式。 中国惯用(通用)的颜色:主电源线黑色-负极,红色+正极(最粗的那两根根)比这两根稍稍细点的一般是充电线路,注意红黑不能接错,不然严重的烧毁车子,运气好的话烧毁线路。粗点,硬的三根线(一般为黄蓝绿三色)是电机线,作用是相位线,可以随便接,主要是转的方向要注意,不然就有了倒车功能了呵呵,和这三根线在一起的是五根小线,红黑在上面两个是电源线不能接反颜色要一致,下面三根黄蓝绿是信号线(也叫:霍尔线)可以随便接,原理与三根电机线一样。其他的线路要通过万用表测量,分别是:喇叭,大灯,转向灯,尾灯,刹车灯,有些带助力的还有助力线。颜色各个厂家采用的不一样,只有通过万用表测。 无刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁
控制器使用说明书
JB-TB-BK8000 智能型火灾报警控制器(联动型) 本系统中的控制器采取模块化、积木式结构设计,使打印机、大屏幕汉显液晶屏、PC机、联动控制板、回路板可与主控板任意组合,32台控制器可构成大型网络,每台控制器其软件、硬件构成方式和带载能力完全相同,因此,即可成为主控机(集中机)又可做从机(区域机)使用。系统采用两总线、无极性、模拟量信号传输方式,总线上可并接所有的输入/输出模块及探测器。其性能符合国际GB4717-93和GB16806-1997的要求。 一、主要功能 1、故障报警 当检测点由于某种原因发生故障时,控制器面板上的黄色发光管点亮,液晶上显示总数及探测点的地址、位置、名称、时间等信息,并伴随有喇叭报警声。 若回路发生故障时,液晶屏的地址位置显示“_路”。 主、从机若通讯有故障时,液静晶屏的地址位置显示“—从机”。 2、预警报警 2.1监测点由于长期使用或者在调试过程中出现重码等原因引起模拟值偏高,系统将其作 为预警处理,面板上的预警灯被点亮,液晶显示预警总数及监测点的地址、位置、名称、时间等信息,并伴随有喇叭报警声。 2.2监测点接收到早期异常情况,但未达到报警点,系统须作进一步判断,系统将预警和 故障作为同一级别处理,因而在液晶上采用同屏显示。 3、火警、启动 当监测点发生火灾时,面板火警被点亮,且面板上的首火警地址,液晶屏上显示火警总数及监测点的地址、名称、位置、时间等信息,并伴随有喇叭报警声; 不管在手动或自动状态下,系统发出启动指令后,面板上联动灯被点亮;如果联动设备有回答信号时,液晶显示联动设备的地址,名称、位置、时间等信息,并伴随有喇叭报警声。 以上各种报警信息均可采用快捷键进行查询。 4、火警优先 在任何情况下,火警、启动为最高级别,优先于故障、预警。 5、消音键 任何报警引起的喇叭均利用消音键进行消音。 6、电源转换 系统采用了主电与备电两种供电方式,并具有自识别能力,能对主电的过压、欠压或失压以及备电低于额定的电压值时,失压等进行声与光的报警。 7、手动与自动 系统设有自动与手动的转换功能,通过自动与手动转换键完成。 8、复位 当火警、启动等状态发生后,系统具有保持功能,通过复位键可以使系统进行复位操作,从机可接受主机的复位信号。 9、关机记忆 系统对火警、启动几开、关机的时间具有记忆功能,以供随时查询。 10、时钟
双轴运动控制器操作手册
双轴运动控制器操作手册 目录 一 与外部驱动器及IO(输入输出)接线图 (3) 二 用户管理操作 (4) 三 系统参数设置 (5) 四 IO(输入输出)设置 (6) 五 系统自检操作 (8) 六 手动操作 (9) 七 编程操作 (11) 八 自动执行 (13) 九 指令详解 (14) 十 电子齿轮计算及公式 (15) 十一 编程案例 (17)
十二 常见问题及处理 (19)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线) 注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二 用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。 用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO 设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分4屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。 修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。若保存成功则提示“参数保存成功”。
west控制器用户手册
使用手册
目录 1................................................................................ 概述错误!未定义书签。 安装........................................................... 错误!未定义书签。 自动安装................................................... 错误!未定义书签。 程序和模块之间的数据连接....................................... 错误!未定义书签。 与模块的连接............................................... 错误!未定义书签。 识别模块................................................... 错误!未定义书签。 离线模式....................................................... 错误!未定义书签。 载入离线数据............................................... 错误!未定义书签。 保存离线数据............................................... 错误!未定义书签。 2................................................................................ 功能错误!未定义书签。 参数表(表格式输入)........................................... 错误!未定义书签。 参数输入................................................... 错误!未定义书签。 参数组..................................................... 错误!未定义书签。 显示器......................................................... 错误!未定义书签。 工艺参数................................................... 错误!未定义书签。 远程控制................................................... 错误!未定义书签。 状态信息................................................... 错误!未定义书签。 示波器......................................................... 错误!未定义书签。 光标功能................................................... 错误!未定义书签。 终端........................................................... 错误!未定义书签。 3............................................................................ 特殊功能错误!未定义书签。 保存/默认/回送................................................. 错误!未定义书签。 保存....................................................... 错误!未定义书签。 默认....................................................... 错误!未定义书签。 回送....................................................... 错误!未定义书签。 导入/导出...................................................... 错误!未定义书签。 固件更新(来自版本的对话框)................................. 错误!未定义书签。 启动固件更新............................................... 错误!未定义书签。 安全密钥组合............................................... 错误!未定义书签。 有效期..................................................... 错误!未定义书签。 固件更新(从传统版本到版)................................... 错误!未定义书签。 4................................................................................ 选项错误!未定义书签。 界面........................................................... 错误!未定义书签。 示波器......................................................... 错误!未定义书签。 显示器......................................................... 错误!未定义书签。 5........................................................................ 系统前提条件错误!未定义书签。 设置 Windows 延迟计时器(仅 USB 接口)......................... 错误!未定义书签。 6................................................................... 安装 USB 驱动程序错误!未定义书签。 7................................................................................ 备注错误!未定义书签。
翠欧控制卡入门手册-MC206X-学习..
目的 (2) 原则 (2) 内容 (2) 1 用途 (2) 1.1 应用领域 (2) 1.2 应用实例 (3) 2 运动控制系统构架 (3) 2.1 组成 (3) 2.2 各部分功能 (4) 3 配线 (6) 3.1 MC206X介绍 (6) 3.2 供电 (9) 3.3 控制器、驱动器配线 (9) 3.4 孔制器、上位机连接 (12) 4 软件编程 (12) 4.1 支持软件使用 (12) 4.2 简单运动指令举例 (27) 4.3 简单运动控制程序举例 (34)
目的 通过阅读本手册,让刚刚接触TRIO运动控制器的客户可以从用途、系统构架、TRIO 在系统中的作用以及软、硬件有一个初步的了解。其中最主要的是,通过本手册一定要让用户能够自己搭建一个简单的控制系统,能用Motion Perfet与控制器、电机连接起来,对电机进行一些简单的操作。为用户未来使用TRIO运动控制器开发项目打下基础。 原则 简单、实用、图文并茂。 内容 1 用途 1.1 应用领域 TRIO运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等进行控制。其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令就可以完成。
1.2 应用实例 2 运动控制系统构架 2.1 组成 2.1.1 运动控制系统概念 运动控制是指在一定的环境中,根据给定的条件,将预定的控制方案、规划指令转变成期望的机械运动。实现对被控目标机械部件精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。 当今的运动控制,由于环境条件的复杂,使得控制方案,数据也显得越来越复杂,这样,实际中要想完成预定的动作,实现准确的运动控制,更多的依靠大型的运动控制系统。 运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。有的系统还包括操作员界面或主机终端前端处理设备。 2.1.2 运动控制系统框图
智能控制器使用手册
一概述 智能控制器是框架式空气断路器的核心部件,适用于50~60Hz电网,主要用作配电、馈电或发电保护,使线 路和电源设备免受过载、短路、接地/漏电、电流不平衡、过压、欠压、电压不平衡、过频、欠频、逆功率等故障 的危害;通过负载监控,需量保护,区域连锁等功能实现电网的合理运行。同时也用作电网节点的电流、电压、功率、频率、电能、需量、谐波等电网参量的测量;故障、报警、操作、电流历史最大值、开关触头磨损情况等运行维护参数的记录;当电力网络进行通讯组网时,智能控制器可用为电力自动化网络的远程终端实现遥测,遥信,遥控,遥调等,智能控制器支持多种协议以适用不同的组网要求。 二基本功能 表1 基本功能配置 2.1.3 通讯功能 通讯功能为可选项,对于M型没有通讯功能,对于H型通讯协议可根据需要选择为Modbus,Profibus-DPQevice net. 2.1.4增选功能选择
1 ?需用值测量 2 ?需用值保护1 ?电压测量 2.频率测量 3?电压不平衡率 及保护 4?相序检测 5.过压保护 6 ?欠压保护 7 ?电压不平衡保 护 &过频保护 9 ?欠频保护 10.相序保护 1 ?电压测量 2.频率测量 3 ?电压不平衡率 4?相序检测 5. 电流需用值测 量 6. 过压保护 7 ?欠压保护 8 ?电压不平衡保 护 9. 过频保护 10. 欠频保护 11. 相序保护 12. 需用值保护 I ?电压测量 2.频率测量 3 ?电压不平衡率 4 ?相序检测 5. 功率测量 6. 功率因数测量 7. 电能测量&过压 保护 9 ?欠压保护 10.电压不平衡保 护 II ?过频保护 12 ?欠频保护 13 ?相序保护 14.逆功率保护 I ?电压测量 2.频率测量 3 ?电压不平衡率 4 ?相序检测 5. 功率测量 6. 功率因数测量 7. 电能测量&需用 值测量 9.过压保护 10 ?欠压保护 II ?电压不平衡保 护 12 ?过频保护 13 ?欠频保护 14 ?相序保护 15 .逆功率保护 16 .最大需用值保 护 I ?电压测量 2.频率测量 3 ?电压不平衡 率 4 ?相序检测 5. 功率测量 6. 功率因数测量 7. 电能测量&谐波 测量 9.过压保护 10 ?欠压保护 II ?电压不平衡保 护 12 ?过频保护 13 ?欠频保护 14 ?相序保护 15.逆功率保护 I ?电压测量 2.频率测量 3 ?电压不平衡率 4?相序检测 5. 功率测量 6. 功率因数测量 7. 电能测量&需用 值测量 9.谐波测量 10 ?过压保护 II .欠压保护 12. 电压不平衡保 护 13. 过频保护 14. 欠频保护 15 ?相序保护 16. 逆功率保护 17. 最大需用值保 护 表2增选功能配置表 2.1.5区域连锁及信号单元的选择 “区域连锁及信号单元”为可选项,M型、H型都可以选择信号单元的功能配置,当信号单元选择为S2, S3时,控制器具备区域连锁功能。 2.2技术性能 2.2.1 适用环境 工作温度:—10C?+ 70 C(24h?内平均值不超过+35 C) 储存温度:—25C?+ 85 C 安装地点最湿月的月平均最大相对湿度不超过90%,同时该月的月平均最低温度不超过+25C,允许由于温度变化产生在产品表面的凝露。 污染等级:3级。(在和断路器装配在一起的情况下) 安装类别:川。(在和断路器装配在一起的情况下) 2.2.2工作电源 由辅助电源和电源互感器同时供电,保证负载很小和短路情况下控制都可以可靠工作。控制器的供电方式有下面3种方式: a.电源CT供电 额定电流大于等于400A时,一次电流单相不低于0.41 n ,三相不低于0.2In时控制器正常工作。额定 电流小于400A时,单相不低于0.8倍,三相不低于0.4倍In时控制器正常工作。
卡乐控制器操作手册C
操作手册
目录---------------------------------------------------------------------------------1 1.简介-------------------------------------------------------------------------------2 1.1基本特性--------------------------------------------------------------------------2 2.硬件结构---------------------------------------------------------------------------2 2.1产品代码--------------------------------------------------------------------------3 2.2pCO主板布局-----------------------------------------------------------------------4 2.3输入/输出口说明-------------------------------------------------------------------5 3用户手操器--------------------------------------------------------------------------6 3.1用户手操器版本--------------------------------------------------------------------6 3.2 pCO手操器按键--------------------------------------------------------------------8 3.3图形显示手操器的功能和特性--------------------------------------------------------8 4. 安装------------------------------------------------------------------------------9 4.11pCO主板的安装-------------------------------------------------------------------9 4.2输入接口-------------------------------------------------------------------------10 4.3输入接口-------------------------------------------------------------------------11 4.4电源-----------------------------------------------------------------------------12 4.5主板EPROM的安装------------------------------------------------------------------12 4.6手操器的安装---------------------------------------------------------------------12 4.7图形显示手操器中程序存储器EPROM的安装--------------------------------------------13 5. 安装注意事项---------------------------------------------------------------------13 6. pLAN局域网-----------------------------------------------------------------------13 6.1主板地址------------------------------------------------------------------------14 6.2手操器地址-----------------------------------------------------------------------15 6.3专用/共享手操器------------------------------------------------------------------15 6.4 pLAN局域网的电气连接------------------------------------------------------------15 6.5 pLAN局域网中手操器远距离安装----------------------------------------------------16 6.6 pLAN局域网的技术特性------------------------------------------------------------17 6.7 pLAN局域网的元件----------------------------------------------------------------177选配卡----------------------------------------------------------------------------177.1图形显示手操器的串行打印卡-----------------------------------------------------177.2标准4×20LCD或6-LED显示手操器的串行打印卡---------------------------------------187.3用于监控和远程维护网络的RS422串行通讯卡-----------------------------------------187.4用于监控和远程维护网络的RS485串行通讯卡-----------------------------------------197.5用于RS232接口的Modem接口卡------------------------------------------------------197.6时钟卡--------------------------------------------------------------------------197.7pLAN 局域网的地址卡-------------------------------------------------------------197.8地址,时钟,32KbityEPROM卡------------------------------------------------------207.9OEM加湿器管理卡-----------------------------------------------------------------207.10选配卡的安装-------------------------------------------------------------------20 8故障原因---------------------------------------------------------------------------20 9技术参数---------------------------------------------------------------------------22 9.1, pCO主板PCOB*的技术参数---------------------------------------------------------22 9.2手操器PCOI*和PCOT*技术参数-------------------------------------------------------23 9.3电气参数-------------------------------------------------------------------------23 10.尺寸-----------------------------------------------------------------------------24 10.1用户手操器----------------------------------------------------------------------24 10.2按键和显示窗口------------------------------------------------------------------24 10.3PCOB*主板-----------------------------------------------------------------------25 11.用户手操器的安装 ----------------------------------------------------------------26 11.1面板安装------------------------------------------------------------------------26 11.2墙壁安装------------------------------------------------------------------------26 12电气连接--------------------------------------------------------------------------27