新型四足机器人步态仿真与实现
M ac hine B uilding
A uto mation,Jun 2008,37(3):21~23,33
作者简介:马东兴(1982— ),男,江苏省丹阳市人,在读硕士研究生,主要从事虚拟样机和四足机器人技术研究。
新型四足机器人步态仿真与实现
马东兴,王延华,岳林
(南京航空航天大学机电学院,江苏南京210016)
摘 要:研究一种背部带关节的新型四足机器人,通过三维建模软件Pr o /E 和机械系统动力学
仿真分析软件ADAMS 建立了四足机器人虚拟样机,规划了四足机器人的步态,并且利用AD 2AM S 仿真软件对该四足机器人进行了步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度控制。仿真与实验结果表明四足机器人能够根据设计步态实现直线行走。
关键词:四足机器人;步态仿真;舵机;单片机中图分类号:TP24 文献标识码:A 文章编号:167125276(2008)0320021203
Ga it S i m ul a ti on and I m plem en t a ti on of a New Quadruped Robot
MA Dong 2xing,WANG Yan 2hua,Y UE L in
(Co ll ege o f M echan i ca l and E l ec tri ca l Eng i nee ri ng,N a n ji ng U n i ve rs ity o f Ae r o na u ti c s &
A s tr o na u ti c s,N a n ji ng 210016,C h i na )
Abstract:A new qua drup e d r obo t w ith w a ist 2j o i nt is d iscu sse d i n this p ap e r .The virtua l p r o t o type o f quad rup ed r obo t is c re a te d by
P r o /E a nd ADAM S a nd the ga it o f the r obo t is p l a nne d.The ga it s i m ul a ti o n of the qua drupe d r o bo t is do ne by ADAM S virtua lp r o t o ty 2p i ng so ft w a re.M e a nw hil e ,w e succe s sfull y con tr o l fi ve rudde r se rvo s by a s i ngl e AT89C52SCM a nd a lso rea li ze the ve l o c ity co ntr o l of the rudde r se rvo.The s i m ul a ti o n a nd e xp e ri m e nta l re sults show tha t the qua drup e d r o t w ith w a is t 2j o i n t ca n w a l k s tra i ght s te a dil y thr ough the de s i gned ga it .
Key words:qua drup e d r obo t;ga it s i m ul a ti o n;rudde r se rvo;SCM
0 引言
与轮式机器人或履带式机器人相比,由于足式机器人的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,足式机器人对崎岖路面也具有很好的适应能力,因此足式机器人受到各国研究人员的普遍重视,目前已成功开发了多款足式机器人。例如日本东京工业大学
研发的TI T AN 2V III [1]
机器人,每个腿具有3个自由度,其
中大腿关节具有前后转动和上下转动2个自由度,膝关节具有1个上下转动自由度。采用新型的电机驱动和绳传动。上海交通大学马培荪等人研制的JT UWM 2III 四足机器人[2,
3]
,腿为开链式关节型结构,膝关节为一纵摇自由
度,髋关节为纵摇和横摇2个自由度。每一腿有3个自由度,共12个自由度。机体重心较高,与哺乳类动物相似,适应于动态行走。华中科技大学研发的“4+2”多足步行机器人[4,
5]
,其腿部件由髖关节、大腿关节、小腿关节和踝
关节四部分组成,大、小腿关节之间由线轮传动,每一腿有
3个自由度。但是先前研制的机器人的本体大多是一个
刚性整体,没有考虑机器人的背部关节。
因此,在分析卡内基梅隆大学(Carnegie Mell on Uni 2
versity )研制的RGR 仿壁虎机器人[628]
,以及韩国庆北大学(Kyungpook Nati onal University )设计的E L I RO 2II 四足步行机器人的基础上[9,
10]
,研究了一种新型四足机器人。
该机器人与传统的足式机器人相比,其机器人本体不再是
一个单一的刚性整体,而是在本体上用一个主动关节将机
器人的本体分为前后两个部分,通过背部主动关节的运动来实现四足机器人的直线行走。通过机械系统动力学仿真分析软件(aut omatic dynam ic analysis of mechanical sys 2te m s,ADAMS )对该四足机器人虚拟样机进行步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度变化,四足机器人的直线行走平均速度达到12.14mm /s 。
1 四足机器人虚拟样机
1.1 四足机器人结构
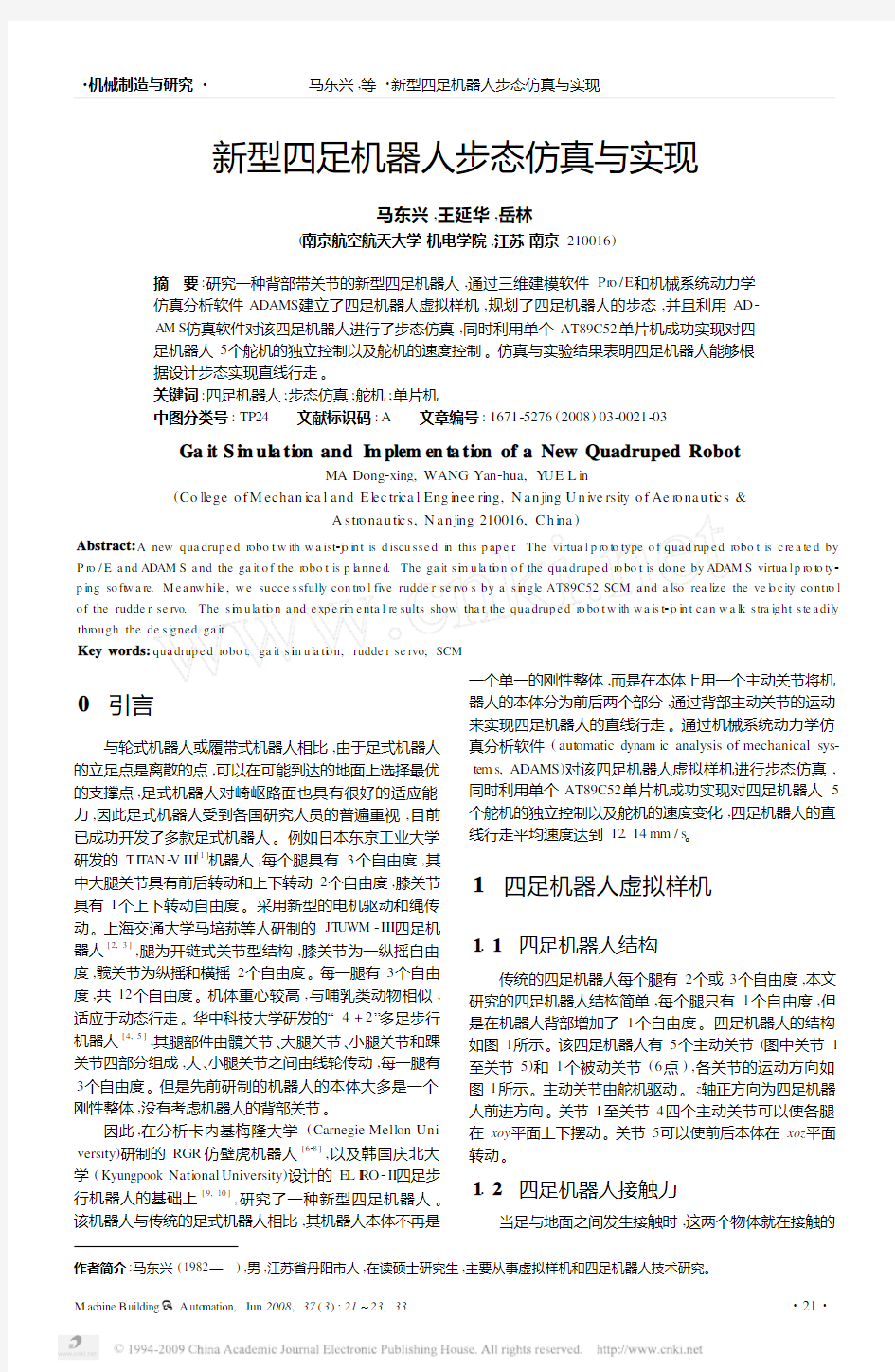
传统的四足机器人每个腿有2个或3个自由度,本文研究的四足机器人结构简单,每个腿只有1个自由度,但是在机器人背部增加了1个自由度。四足机器人的结构如图1所示。该四足机器人有5个主动关节(图中关节1至关节5)和1个被动关节(6点),各关节的运动方向如图1所示。主动关节由舵机驱动。z 轴正方向为四足机器人前进方向。关节1至关节4四个主动关节可以使各腿在xoy 平面上下摆动。关节5可以使前后本体在xoz 平面转动。
1.2 四足机器人接触力
当足与地面之间发生接触时,这两个物体就在接触的
?
12?
htt p:∥ZZHD.chinaj ournal .net .cn E 2mail:ZZHD@chainaj ournal .net .cn 《机械制造与自动化
》
图1 四足机器人结构简图
位置产生接触力。足与地面的接触力是一种特殊的力,它们之间是一种时断时续的接触,在这种情况下,足与地面从不接触到接触再到不接触,由于存在相对运动,在接触的位置,足与地面开始出现材料压缩,物体的动能转化成材料的压缩势能,并伴随着能量的损失。当足与地面的相对速度为零时,足又要开始弹起,势能转化成动能,并伴随着能量的损失。
在ADAMS 软件中有两种计算接触力的方法[11],一种是补偿法(restituti on ),另一种是冲击函数法(i m pact )。补偿法:接触力根据给出的惩罚参数和归还系数进行计算,其中惩罚系数用来模拟单边约束,归还系数用来控制碰撞时能量的扩散。冲击函数法:计算碰撞力时,调用
ADAM S 函数库中的i m pact 函数来计算相互碰撞的两个物
体之间的接触力。接触力由两个部分组成,一个是由于两个物体之间的相互切入而产生的弹性力,另一个是由相对速度产生的阻尼力。所以,补偿法适于多次碰撞,而冲击函数法适于单侧碰撞。四足机器人虚拟样机中,足与地面的碰撞是单侧碰撞,因此选用冲击函数法(i m pact )。而摩擦力取为库伦摩擦力,接触力的各参数如表1所示。
表1 接触力参数设置
接触力参数名称数值大小
静态摩擦系数0.8动态摩擦系数0.7刚度/(N /mm )2855力的非线性
2.2最大阻尼系/(N ?sec /mm )10最大阻尼时变形深度/mm 0.1摩擦转换速度/(mm /s )10粘质转换速度/(mm /s )
0.1
由于ADAMS 软件的建模功能有限,通过功能强大的建模软件Pr o /E 创建四足机器人的三维实体模型,再通过
MD I 公司开发的无缝连接Pr o /E 软件与ADAM S 软件间
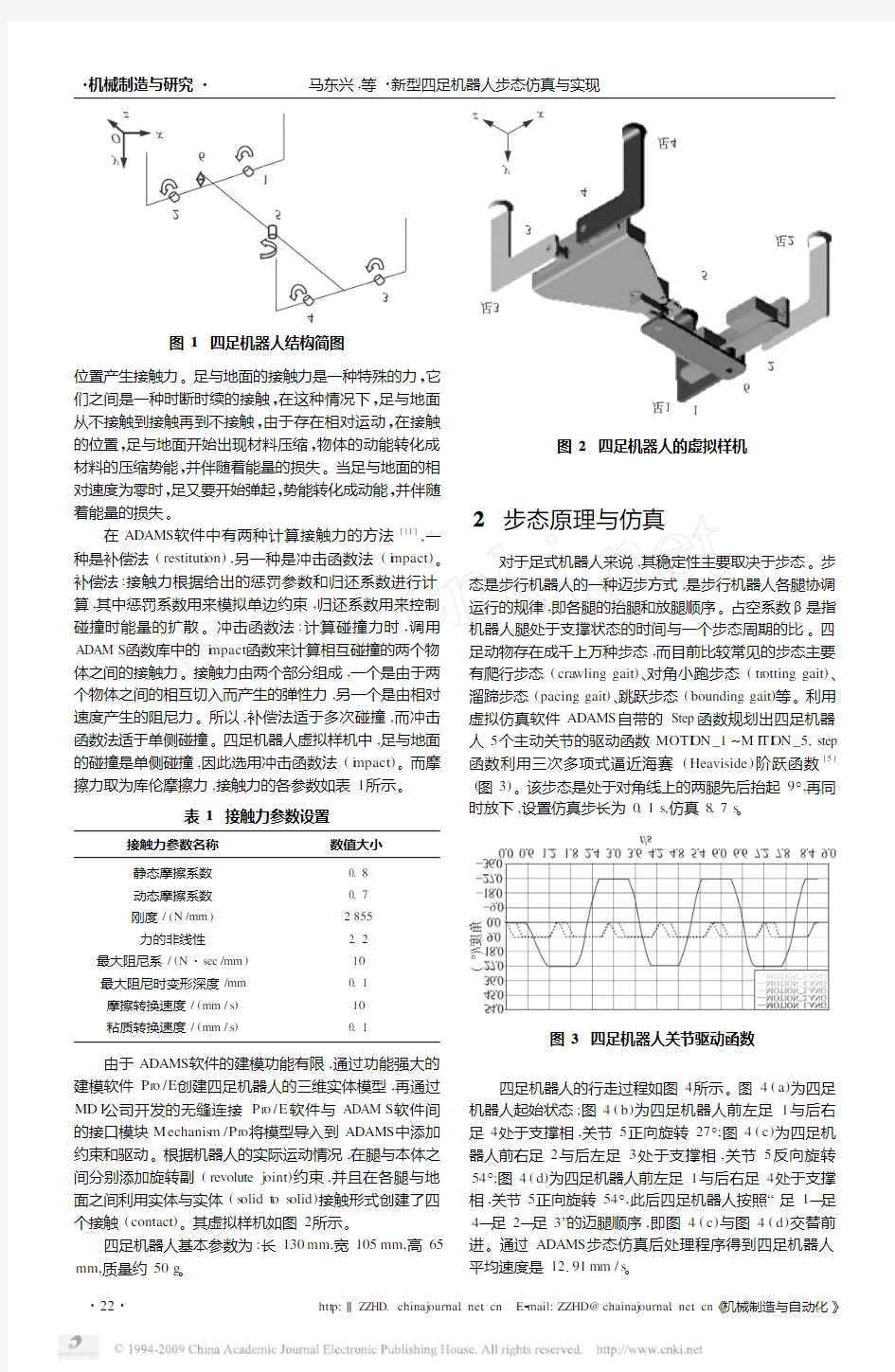
的接口模块M echanis m /Pr o 将模型导入到ADAMS 中添加约束和驱动。根据机器人的实际运动情况,在腿与本体之间分别添加旋转副(revolute j oint )约束,并且在各腿与地面之间利用实体与实体(s olid t o s olid )接触形式创建了四个接触(contact )。其虚拟样机如图2所示。
四足机器人基本参数为:长130mm,宽105mm,高65
mm,质量约50g
。
图2 四足机器人的虚拟样机
2 步态原理与仿真
对于足式机器人来说,其稳定性主要取决于步态。步
态是步行机器人的一种迈步方式,是步行机器人各腿协调运行的规律,即各腿的抬腿和放腿顺序。占空系数β是指机器人腿处于支撑状态的时间与一个步态周期的比。四足动物存在成千上万种步态,而目前比较常见的步态主要有爬行步态(cra wling gait )、对角小跑步态(tr otting gait )、溜蹄步态(pacing gait )、跳跃步态(bounding gait )等。利用虚拟仿真软件ADAMS 自带的Step 函数规划出四足机器人5个主动关节的驱动函数MOTI O N _1~M I TI O N _5,step 函数利用三次多项式逼近海赛(Heaviside )阶跃函数[5](图3)。该步态是处于对角线上的两腿先后抬起9°,再同时放下,设置仿真步长为0.1s,仿真8.7s
。
图3 四足机器人关节驱动函数
四足机器人的行走过程如图4所示。图4(a )为四足
机器人起始状态;图4(b )为四足机器人前左足1与后右足4处于支撑相,关节5正向旋转27°;图4(c )为四足机器人前右足2与后左足3处于支撑相,关节5反向旋转54°;图4(d )为四足机器人前左足1与后右足4处于支撑相,关节5正向旋转54°,此后四足机器人按照“足1—足4—足2—足3”的迈腿顺序,即图4(c )与图4(d )交替前进。通过ADAMS 步态仿真后处理程序得到四足机器人平均速度是12191mm /s 。
?22?
图4 四足机器人行走过程
3 实验验证
3.1 舵机主要参数及工作原理
舵机主要由舵盘、直流电机、减速齿轮组、位置反馈电位计和内部控制电路组成。
本文选择的是质量仅为4.3g的BA2TS24.3型号的舵机。其主要参数列于表2。
表2 舵机主要参数
参数名称参数大小
可控转角范围/(°)0~180
可控脉宽范围/m s0.5~2.5
堵转扭矩/(kg?c m/V)0.7/4.8;
0.8/6.0
空载速度/[s/(°)]0.12/60
总体尺寸/mm19.6×19.6×8
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20m s,宽度为1.5m s的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动[6]。
3.2 舵机控制及速度控制
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生周期为20m s基本脉宽调制(P WM)信号;其次是脉宽的调整,即单片机模拟P WM信号的输出,并且调整占空比[12]。
舵机的控制信号是周期为20m s的P WM信号,利用占空比的变化改变舵机的位置。舵机的控制要求如图5所示,其中脉宽在0.5m s~2.5m s之间变化,对应的舵机在0°~180°之间呈线性变化。所以如果需要使舵机维持某一转角,需要不间断地向舵机发送相同脉宽的P WM信号,若需要改变舵机的转角,就需要改变P WM信号的脉宽。
AT89C52单片机同时控制
5个舵机的转动,就要求单片机能够同时将5路脉宽不同的P WM信号持续地发送给舵机内部控制器,从而使机器人能够按照设计步态行
图5 舵机的P WM控制
走。另外,由于机器人是按照一个步态接着一个步态有规律的行走的,如此反复,经过若干个步态后,机器人又回到初始状态,把前进一次的步态以循环的方式控制,即可实现机器人的连续行走。
目前市场上出售的舵机速度都比较快,选用的舵机空载速度为0.12s每60°,此速度直接用于机器人关节运动会引起较大冲击。因此需要对舵机进行降速处理。由于舵机的驱动信号是间歇性发送内部控制器的,将每个周期
内的脉宽宽度以不同的微量递增或递减,则在宏观上就可以实现不同速度的变化[13]。舵机速度控制流程图如图6所示。
图6 舵机速度控制流程图
舵机的可转角范围为:0°~180°,可控脉宽范围:0.5 m s~2.5m s,则脉宽每改变0.05m s,相应的舵机转角将改变4.5°。若四足机器人腿部关节需要转动27°,即脉宽需要变化0.3m s。那么将0.3m s脉宽分6次(每次延时时间为40m s)发送给舵机内部控制器,就可以实现舵机的降速。经过多次反复实验测得机器人的平均速度是12114mm/s。故实验值与仿真值基本吻合。
(下转第33页)
?机械制造与研究?徐松杰?制造过程有效性评价与改进
入指标在现有基础上分别降低31.79%,14.74%,
83165%,29157%和14174%。同时将产出指标y1提高
125139%,y3提高47.43%,就可以使DMU17达到有效。比
较而言,企业B的投入产出调整幅度较之企业E要小,表
明企业B的各项投入指标的利用程度相对较高,产出指标
也较接近目标值;相反,企业E的各项投入产出指标均有较
大的调整幅度,表明其投入指标还存在较大的改进空间,资
源利用率有待提高。进一步分析企业E的投入产出指标,可
知x
3(设备维护投入)和y
1
(生产率产出)的调整幅度最大,因
此,企业E可以优先调整x
3和y
1
以提高其过程的有效性。
整体来看,B企业和E企业无效的原因主要源于设备陈旧所带来的维护费用投入过高(x
3
)和设备运行成本加
大(x
4),从而导致设备生产率过低(y
1
)。因此,要提高制
造过程的有效性,设备技术进步是关键。企业一方面可以通过技术改造改进现有设备的性能和精度,从而达到节约资源、降低能耗、提高产品质量和设备生产率的目的;另一方面,有条件的企业还可以进行设备更新,用新型设备代替老设备。现代生产设备具有高速度、高效率和高自动化的特点,制造过程中能够实现设备运行状态的自动检测以及故障的自动排除,从而可以极大地提高产品品质和设备生产效率。由此可见,加快企业的设备改造或更新是提高两家企业制造过程有效性的关键所在。
4 结论
通过五家企业的样本数据,运用DE A模型评价了具 有相似特征的20个制造过程的有效性,并对无效过程进行了诊断分析和改进。DE A方法在工业领域有着广泛的应用前景,无论是有效过程还是无效过程的识别,都能为管理者提供许多有益的决策信息。过程有效性的评价分析和诊断,为管理者识别关键过程因素、改进过程策划和加强过程监控等提供了决策依据。文中所述方法可进一步推广应用于其他过程,如R&D过程、库存过程等的评价诊断和改进。
参考文献:
[1]G B/T19580-2004,卓越绩效评价准则[S].
[2]刘飞,杨丹,陈进.制造系统工程[M].北京:国防工业出版
社,1995.
[3]陈良猷.管理工程学[M].北京:北京航空航天大学出版
社,1995.
[4]G olany B,Roll Y.An app licati on p r ocedure for DE A[J].I nter2
nati onal Journal of Manage ment Science,1989,17(3):2372250.
[5]Charnes A,CooperW W,Rhodes E.Measuring the efficiency of
decisi on making units[J].Eur opean Journal of Operati onal Re2 search,1978(2):4292444.
收稿日期:2007211228;修回日期:2008203218
(上接第23页)
4 结论
与传统四足机器人不同,本文所研究的是背部带关节的四足机器人,该四足机器人具有结构简单、自由度少和质量轻等特点。通过ADA MS软件建立四足机器人虚拟样机,规划了四足机器人的步态,利用ADA MS仿真软件对该四足机器人进行了步态仿真,成功实现对舵机的速度控制,并且进行了步态实验。仿真与实验结果表明四足机器人具有良好的平稳性,直线行走平均速度达到12.14mm/s。
参考文献:
[1]A rikawa K,H ir ose S.Devel opment of quadruped walking r obot
TI T AN2V III[A].I EEE I nternati onal Conference on I ntelligent Robots and System s[C].1996:2082214.
[2]何冬青,马培荪,曹曦,等.四足机器人对角小跑起步姿态对
稳定步行的影响[J].机器人,2004,26(6):5292532.
[3]何冬青,马培荪.四足机器动态步行仿真及步行稳定性分析
[J].计算机仿真,2005(2):1462149.
[4]陈学东,孙翊,贾文川.多足步行机器人运动规划与控制
[M].武汉:华中科技大学出版社,2006.
[5]苏军,陈学东,田文罡.六足步行机器人全方位步态的研究
[J].机械与电子,2004(3):48252.
[6]Menon C,Sitti M.A bi om i m etic cli m bing r obot based on the
gecko[J].Journal of B i onic Engineering.2006,3(3):1152125.
[7]Menon C,Sitti M.B i ol ogically ins p ired adhesi on based surface
cli m bing r obots[A].Pr oceedings of the2005I EEE I nternati onal Conference on Robotics and Aut omati on[C].Barcel ona,Spain, 2005:271522720.
[8]Menon C,Mur phyM,SittiM.Gecko ins p ired surface cli m bing r o2
bots[A].I EEE I nternati onal Conference on Robotics and B i om i2 metics(ROB I O)[C].Shenyang,China,2004:4312436.
[9]Park S,Lee Y J.D iscontinuous zigzag gait p lanning of a quadru2
ped walking r obot with a waist2j oint[J].Advanced Robotics, 2007,21(1):14321642.
[10]Park S,Ki m D S,Lee Y J.D iscontinuous s p inning gait of a
quadruped walking r obot with waist2j oint[A].Pr oceedings of
I EEE I nternati onal Conference on I ntelligent Robots and Syste m s
[C].2005:274422749.
[11]陈立平,张云清,任卫群,等.机械系统动力学分析及AD2
AMS应用教程[M].北京:清华大学出版社,2005.
[12]时玮.利用单片机P WM信号进行舵机控制[J].今日电子,
2005(10):80282.
[13]赵杰,郭亮,臧希秸,等.应用于六足机器人平台的舵机控制
器设计[J].机械与电子,1995(9):48251.
收稿日期:2007211221
四足机器人步行腿运动学正反解
四足机器人步行腿的运动学正反解摘要:本文设计的步行腿具有3个驱动关节,分析了该步行机器人的机构及其等效简化,给出了运动学正反解,正解问题要比反解问题复杂很多。该分析方法准确率高,为步行腿的运动空间、轨迹规划和位置控制奠定了基础。 关键词:步行腿运动学正反解 abstract: in this paper, the design of walking legs with three drive joint analysis of the institutions of the walking robot and its equivalent simplified kinematics and inverse solution positive solution of the problem is much more complex than the inverse solution. the analytical method with high accuracy, and laid the foundation for walking space for the movement of the legs, trajectory planning and position control. keywords: walking legs kinematics positive and negative solution 0 前言 四足机器人的行走机构是步行腿,它是步行机器人中最为重要也是最复杂的构件[1],步行腿的灵活度这届决定了步行机器人的行走姿态和完成任务的复杂程度。本文设计的步行腿具有三个驱动关节,采用混连机构设计。给出了步行腿的运动正解和反解,是整个四足步行机器人系统设计的基础,也是机器人运动空间分析和尺
新型四足机器人步态仿真与实现
M ac hine B uilding A uto mation,Jun 2008,37(3):21~23,33 作者简介:马东兴(1982— ),男,江苏省丹阳市人,在读硕士研究生,主要从事虚拟样机和四足机器人技术研究。 新型四足机器人步态仿真与实现 马东兴,王延华,岳林 (南京航空航天大学机电学院,江苏南京210016) 摘 要:研究一种背部带关节的新型四足机器人,通过三维建模软件Pr o /E 和机械系统动力学 仿真分析软件ADAMS 建立了四足机器人虚拟样机,规划了四足机器人的步态,并且利用AD 2AM S 仿真软件对该四足机器人进行了步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度控制。仿真与实验结果表明四足机器人能够根据设计步态实现直线行走。 关键词:四足机器人;步态仿真;舵机;单片机中图分类号:TP24 文献标识码:A 文章编号:167125276(2008)0320021203 Ga it S i m ul a ti on and I m plem en t a ti on of a New Quadruped Robot MA Dong 2xing,WANG Yan 2hua,Y UE L in (Co ll ege o f M echan i ca l and E l ec tri ca l Eng i nee ri ng,N a n ji ng U n i ve rs ity o f Ae r o na u ti c s & A s tr o na u ti c s,N a n ji ng 210016,C h i na ) Abstract:A new qua drup e d r obo t w ith w a ist 2j o i nt is d iscu sse d i n this p ap e r .The virtua l p r o t o type o f quad rup ed r obo t is c re a te d by P r o /E a nd ADAM S a nd the ga it o f the r obo t is p l a nne d.The ga it s i m ul a ti o n of the qua drupe d r o bo t is do ne by ADAM S virtua lp r o t o ty 2p i ng so ft w a re.M e a nw hil e ,w e succe s sfull y con tr o l fi ve rudde r se rvo s by a s i ngl e AT89C52SCM a nd a lso rea li ze the ve l o c ity co ntr o l of the rudde r se rvo.The s i m ul a ti o n a nd e xp e ri m e nta l re sults show tha t the qua drup e d r o t w ith w a is t 2j o i n t ca n w a l k s tra i ght s te a dil y thr ough the de s i gned ga it . Key words:qua drup e d r obo t;ga it s i m ul a ti o n;rudde r se rvo;SCM 0 引言 与轮式机器人或履带式机器人相比,由于足式机器人的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,足式机器人对崎岖路面也具有很好的适应能力,因此足式机器人受到各国研究人员的普遍重视,目前已成功开发了多款足式机器人。例如日本东京工业大学 研发的TI T AN 2V III [1] 机器人,每个腿具有3个自由度,其 中大腿关节具有前后转动和上下转动2个自由度,膝关节具有1个上下转动自由度。采用新型的电机驱动和绳传动。上海交通大学马培荪等人研制的JT UWM 2III 四足机器人[2, 3] ,腿为开链式关节型结构,膝关节为一纵摇自由 度,髋关节为纵摇和横摇2个自由度。每一腿有3个自由度,共12个自由度。机体重心较高,与哺乳类动物相似,适应于动态行走。华中科技大学研发的“4+2”多足步行机器人[4, 5] ,其腿部件由髖关节、大腿关节、小腿关节和踝 关节四部分组成,大、小腿关节之间由线轮传动,每一腿有 3个自由度。但是先前研制的机器人的本体大多是一个 刚性整体,没有考虑机器人的背部关节。 因此,在分析卡内基梅隆大学(Carnegie Mell on Uni 2 versity )研制的RGR 仿壁虎机器人[628] ,以及韩国庆北大学(Kyungpook Nati onal University )设计的E L I RO 2II 四足步行机器人的基础上[9, 10] ,研究了一种新型四足机器人。 该机器人与传统的足式机器人相比,其机器人本体不再是 一个单一的刚性整体,而是在本体上用一个主动关节将机 器人的本体分为前后两个部分,通过背部主动关节的运动来实现四足机器人的直线行走。通过机械系统动力学仿真分析软件(aut omatic dynam ic analysis of mechanical sys 2te m s,ADAMS )对该四足机器人虚拟样机进行步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度变化,四足机器人的直线行走平均速度达到12.14mm /s 。 1 四足机器人虚拟样机 1.1 四足机器人结构 传统的四足机器人每个腿有2个或3个自由度,本文研究的四足机器人结构简单,每个腿只有1个自由度,但是在机器人背部增加了1个自由度。四足机器人的结构如图1所示。该四足机器人有5个主动关节(图中关节1至关节5)和1个被动关节(6点),各关节的运动方向如图1所示。主动关节由舵机驱动。z 轴正方向为四足机器人前进方向。关节1至关节4四个主动关节可以使各腿在xoy 平面上下摆动。关节5可以使前后本体在xoz 平面转动。 1.2 四足机器人接触力 当足与地面之间发生接触时,这两个物体就在接触的 ? 12?
创意之星模块化机器人实验程序
第一次实验:MultiFLEX控制卡编程实验 蜂鸣器实验 #include
{ write_gpio(~((uint16)io_out)); delay(5);//延时5×20MS=0.1s io_out<<=1; write_gpio(~((uint16)io_out)); delay(5); } } else write_gpio(0xFF00); } } 第二次实验:多自由度串联式机械手 #include "Public.h" #include "Usertask.h" void u ser_task(void) { uint8 array_rc[23]={0};//舵机控制数组长度为24,可控制12路舵机,舵机运动函数要求array_rc[偶数]为舵机目标角度值,array_rc[奇数]为舵机运动速度值 array_rc[0]=90; //舵机1,中位为0度(对应数值90),目标角度+20度。取值范围0-180,超过此范围程序会丢弃此数据 array_rc[1]=170;//舵机1,速度为170。取值范围0-255,超过范围程序会丢弃此数据 array_rc[2]=90;//舵机2目标角度设置 array_rc[3]=170;//舵机2转动速度设置 array_rc[4]=90+90;//舵机3 array_rc[5]=170; rc_moto_control(array_rc);//将舵机运动信息交给舵机运动函数,实现舵机运动 delay(50);//延时50*20MS= 1S,给舵机提供反应时间,此反应时间应大于舵机实际运动所需时间 array_rc[0]=90-90; array_rc[1]=170; array_rc[2]=90-90; array_rc[3]=170; array_rc[4]=90+90; array_rc[5]=170; rc_moto_control(array_rc); delay(50); array_rc[0]=90; array_rc[1]=170; array_rc[2]=90;
四足机器人方案设计书
浙江大学“海特杯”第十届大学生机械设计竞赛“四足机器人”设计方案书
“四足机器人”设计理论方案 自从人类发明机器人以来,各种各样的机器人日渐走入我们的生活。仿照生物的各种功能而发明的各种机器人越来越多。作为移动机器平台,步行机器人与轮式机器人相比较最大的优点就是步行机器人对行走路面的要求很低,它可以跨越障碍物,走过沙地、沼泽等特殊路面,用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人。四足机器人在整个步行机器中占有很大大比重,因此对仿生四足步行机器人的研究具有很重要的意义。 所以,我们在选择设计题目时,我们选择了“四足机器人”,作为我们这次比赛的参赛作品。 一.装置的原理方案构思和拟定: 随着社会的发展,现代的机器人趋于自动化、高效化、和人性化发展,具有高性能的机器人已经被人们运用在多种领域里。特别是它可以替代人类完成在一些危险领域里完成工作。 科技来源于生活,生活可以为科技注入强大的生命力,基于此,我们在构思机器人的时候想到了动物,在仔细观察了猫.狗等之后我们找到了制作我们机器人的灵感,为什么我们不可以学习小动物的走路呢,于是我们有了我们机器人行走原理的灵感。 为了使我们所设计的机器人在运动过程中体现出特种机器人的性能及其运动机构的全面性,我们在构思机器人的同时也为它设计了一些任务: 1. 自动寻找地上的目标物。 2. 用机械手拾起地上的目标物。 3.把目标物放入回收箱中。 4. 能爬斜坡。 图一 如图一中虚线所示的机器人的行走路线,机器人爬过斜坡后就开始搜寻目
标物体,当它发现目标出现在它的感应范围时,它将自动走向目标,同时由于相关的感应器帮助,它将自动走进障碍物中取出物体。 二.原理方案的实现和传动方案的设计: 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 图二 图三 机器人初步整体构思如上的图二和图三,四只腿分别各有一个电机控制它的转动,用一个电机驱动两条腿的抬伸。根据每只腿的迈步先后实现机器人的前进,后退,左转和右转,在机器人腿迈出的同时,它也会相应地进行抬伸,具体实现情况会在下文详细说明。 任务的实现主要是利用单片机来控制机器人的四条腿以及几个传感器的共同工作,并通过它们的协调工作来完成的。如图一中所示,让机器人爬过了斜坡之后,就先进行扫描,如果发现有目标出现在它的视野之内,它就会寻着目标前进。如果没有发现目标,机器人会原地转弯并搜寻在它视野之外的目标。由于目标物有可能正好被障碍物遮住,此时我们会设计相应的程序告诉机器人现在先向右行走一定的距离再进行扫描。又由于尽管已经扫描到了目标物,当机器人走向
外文翻译---四足机器人的步态适应
附录 Gait Adaptation in a Quadruped Robot 1. Introduction A short time after birth a foal can walk and then run. It is remarkable that the animal learns tocoordinate the many muscles of the legs and trunk in such a short period of time. It is not likely that any learning algorithm could program a nervous system ab initio with so few training epochs. Nor is it likely that the foal?s locomotor controller is completely determined before birth. How can this a- bility be explained? How can this ability be incorporated into the control system of a walking machine? Researchers in biology have presented clear evidence of a functional unit of the central nervous system, the Central Pattern Generator (CPG), which can cause rhythmic movement of the trunk and limb muscles(Grillner and Wall′en, 1985). In adult animals, the output of these cells can generate muscle activity that is very similar to activity during normal walking, even when sensory feedback has been eliminated (Grillner and Zangger, 1975). The CPG begins its ac- tivity before birth, although its activity does not appear to imitate the details of a particular walking animal, it is apparently correlated with the animal?s class, i.e., amphibian, reptile, mammal, etc. (Bekoff, 1985; Cohen, 1988).Apparently, the basic structure of the CPG network is laid down by evolution. How is this basic structure adapted to produce the detailed coordination needed to control a walk- ing animal? The answer to this question is important to robotics for the following reason. CPGs have been well studied as a basic coordinating mechanism (Cohen et al., 1982; Bay and Hemami, 1987; Matsuoka, 1987; Rand et al., 1988; Taga et al., 1991; Collins and Stewart, 1993; Murray, 1993; Zielinska, 1996; Jalics et al., 1997; Ito et al., 1998; Kimura et al., 1999). However, the details of how this system can automatically adapt to control a real robot are not clear. A good goal would be to describe a general strategy for matching a generic CPG to a particular robot in real-time, with a minimal amount of interaction with the environment.
“创意之星”模块化机器人实验指导书(实验版)
电子科技大学 “创意之星”模块化机 器人实验 机械电子工程学院 2010 年3 月
目录 实验一MULTIFLEX控制卡编程实验 (1) 实验二多自由度串联式机械手 (10) 实验三简易四足机器人 (15) 实验四轮式机器人运动控制实验 (19) 实验五机器人传感系统实验 (24) 实验六自主避障机器人实验 (27) 实验七追光的机器爬虫 (37) 实验八开放性实验:设计自己的机器人 (48)
实验一MultiFLEX 控制卡编程实验 实验目的 (1)了解MultiFLEX控制卡的基本结构; (2)了解WinAVR+AVRStudio编译环境的使用; (3)了解C 语言环境下编写控制程序,并编译、下载到MultiFLEX 控制器中执行的流程 (4)熟悉关于AVR 单片机的io 口有关的寄存器的概念、作用 (5)理解函数gpio_mode_set(),write_gpio(),read_gpio()的定义,掌握其用法 (6)熟悉并掌握利用2 中的3 个函数控制MultiFLEX 控制卡的16 路IO 口实验环境: UP-MRcommander 控制软件 实验器材: 计算机1台 MultiFLEX 控制卡1块 控制卡电源线1根 串口下载线1根 232电缆1根 USB转232电缆1根 舵机4个 舵机延长线4根 实验步骤 1 WinAVR 以及AVRStudio 软件的安装 首先大家打开实验指导书配套光盘,在“MultiFLEX 控制卡\AVR MCU 开发资料”目录下,打开“WinAVR”文件夹,双击 “WinAVR-20060421-install.exe”完成WinAVR 的安装;然后打开“AVR Studio”文件夹,根据文件夹里面的安装说明进行AVRstudio 的安装,并将其升级到最新版本。 注意:请先安装WinAVR 再安装AVRStudio,这样WinAVR 才能自动嵌入到AVRStudio 中。 2 用3AVRStudio 建立一个工程 首先打开我们刚刚安装好的AVRStudio,会出现如下窗口:
四足机器人设计报告
四足机器人设计报告 摘要:本文介绍了四足机器人(walking dog )的设计过程,其中包括控制系统软硬件的设计、传感器的应用以及机器人步态的规划。 一、本体设计: walking dog 的单腿设置髋关节和踝关节两自由度,能在一个平面内自由运动(见图1.1)。采用舵机作为机器人的关节驱动器,其单腿结构图见(图1.2)。为了便于步态规划,设计上下肢L1、L2长均为65mm 。四肢间用铝合金框架连接,完成后照片见(图1.3)。walking dog 的每只脚底均有一个光电传感器,能有效检测脚底环境的变化。walking dog 的头部为一个舵机,携带光电反射式传感器,能探测前方180度75cm 内的障碍物。 图1.1 四足机器人模型 图1.2 单腿结构 图1.3:完成后照片 二、控制系统设计 为了使机器人能灵活地搭载各种传感器以及实现不同的步态,将底层驱动单元与上层步态算法平台分开。因为walking dog 的各关节均为舵机,特设计了16路舵机驱动器作为底层驱动单元,用来驱动机器人全身各关节。并设计了上层算法平台,将各关节参数通过UART 实时地发送到底层驱动单元。图2.1为系统框图。
图2.1:系统框图 1、底层驱动单元设计 图2.2给出了舵机的工作原理框图,电动机驱动减速齿轮组,并带动一个线性的电位器作位置检测,控制电路将反馈电压与输入的控制脉冲信号作比较,产生偏差并驱动直流电动机正向或反向转动,使齿轮组的输出位置与期望值相符。 图2.2:舵机工作原理框图 针对舵机这一特性,设计底层驱动器的系统结构图见图2.3。Mage8的16位定时器分时产生16次定时中断,中断子程序产生移位脉冲,通过4N25光偶隔离输入到移位寄存器,实现各路PWM信号高电平部分的分时产生。图2.4为定时产生脉冲的中断处理流程,图2.5例举了产生4路PWM信号的波形图。实际电路原理图见附录1。 图2.3:16路舵机驱动器结构图
创客中心建设方案
创客中心建设方案 1.创客教学背景 “创客”源于英文单词Maker,在中文里“创”的含义是:创造、首创、开创、创立,它体现了一种通过行动和实践去发现问题、解决问题的做事原则。“创客”就是坚守创新,持续实践,乐于分享的一群人。 2015年1月28日,********、国务院总理**主持召开国务院常务会议,确定了支持发展“众创空间”的多项政策措施,明确要求“打造良好创业创新生态环境。培育创客文化,让创业创新蔚然成风”。 2015年3月2日,科技部“发展众创空间推进大众创新创业电视电话会议”中进一步强调,推进大众创新创业是新时期科技工作的重要任务,要按照党**、国务院决策部署,努力营造良好的创新创业生态环境,帮助大众创新创业者应用新技术、开发新产品、创造新需求、培育新市场、打造新经济。 要培育创客文化、广泛推广创客教学并不是中国特色的新事物。在过去几年内,美国高校中的学术性创客空间和制造类实验室迅速多了起来。而一些K12(美国基础教育的通称)学校也纷纷尝试在图书馆设立创客空间,或者改装教室以适应基于项目和实践的学**。 其实,对学校而言,开展“创客”教学更像是传统实践教育在数字时代的“升级版”,其精髓是将学生训练成为能独当一面的工程师,提高学生应对复杂应用需求的综合应对能力,加深学生的专业技能。这种人才培养模式陆续在德国、美国的工程院校、技术院校和科技院校中推进,取得了很好的效果。它把教学与实践、教室与工作室、知识获取和能力锻炼、教育文化和企业文化多方面融合,开创一种新型的人才培养模式。可以想象,如果每个科技类专业学生都具有创客精神,将会产生多大的价值空间。
2. 建设创客中心的构想 学生是创客的主体,在学生中间,有少数的创客,一部分很向往,绝大多数表示支持。让创客们继续坚持,让大多数人参与进来,如果没有大力组织推动,就不太可能。简单讲,对学生而言不缺乏积极性和钻研兴趣,缺乏的是氛围和场地。因此,创客中心应该满足学生群体的基本需求。 对于教师日常教学而言,创客可以激发学生的学**主动性,带着项目任务和实践中的目标去学**,能让教学过程体现出更大的趣味性、深度和价值。通过创客中心的建设,产生一种新型的教学方式或文化并延续下来,也是教学改革创新的需求。 对学校而言,创客没有专业的隔阂,创客文化的传播是一个学校整体性的活动。如果将创客教育作为一种人才培养的模式,创客精神就会逐渐发展为学校的一种学**氛围,产生这种氛围就应该是创客中心建设的意义。 从学生、教师、学校三个层次的需求出发,构建一个创客中心的平台,这个平台能给入门级的学生提供一个训练场所,通过项目推动,引导学生动手实践,实现想法,项目可由老师的研究课题延伸,或自由命题,重在领入门和培养兴趣,对于大部分学生,通过开课做普及性的培训,对于拔尖学生,有一个固定的活动场所和团队组织。 3. 建设的目标 第一,明确一个方向:广义的创客没有学科的限制,增加了建设的难度。根据高等理工科类院校的实际情况,机电一体化、机器人技术涵盖了机械、电子、计算机信息等学科技术,覆盖面广、综合性强,具有一定的技术深度,适合全面推广。 第二,确定两个目标:实际创客中心针对的是两个群体,一个是没有创客概念、但有兴趣愿意尝试的,对于这一群体,重点是“领进来”进行“培养基础”,培养之后,有一部分人能坚持,掌握了一定的技能,并已经融入创客文化的,成为另外一个群体,对这个群体的培养应该是着重引导创新。因此,创客中心建设的核心目标应该是“培养基础”和“引导创新”。简称“培养”、“创新”。
创意之星之四足机器人
大学 专业实践课题:四足追光机器人 姓名: 学院:机械工程学院 专业:机械设计制造及其自动化 班级: 学号: 指导教师:
四足追光机器人 一、实验目的 用“创意之星”机器人套件组装可以进行追光行走的四足机器人; 二、实验套件(创意之星) 1.机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等; 2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等; 3.控制软件:NorthSTAR 图形化开发环境 三、实验步骤 1、确定其基本功能 基本功能: a.在平地上通过步态设计,可以正常迈步行走。同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。 b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转。右侧的光源强于左侧的光源时用同样的原理控制机器人右转。 c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。直至检测不到光源停止,再控制向后退。
2、机构设计 整个巡视机器人由大致三个模块组成: a.由8个舵机组成四足机器人的4条腿模块; b.由2个舵机组成四足机器人尾部部分; c.由2个红外接近传感器和1个舵机组成的感应模块。 3、机构的装配 整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。 安装可分为零件的安装,部件的组装以及最后的总装过程。根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构。 4、连接电线 由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单。 5、设置各个舵机的限制参数 一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面
创意之星机器人说明书
创意之星机器人说明书
目录 1结构套件简介 (3) 1.1 结构件概述 (3) 1.2 ConnFLEX连接结构 (3) 1.3 不同版本......................................................................................................... .. (4) 1.4 使用零件3D模型 (6) 2控制器及电源 (7) 2.1 MultiFLEX?2-A VR控制器 (8) 2.2 MultiFLEX?2-PXA270控制器 (9) 2.3 电池和直流电源 (12) 3传感器 (12) 3.1传感器的信号类型及电气规范 (13) 3.2“创意之星”传感器接口 (14) 3.1接近传感器 ...................................................................................................... (16) 3.2 测距传感器 (19) 3.3 声音传感器 (24) 3.4 碰撞传感器 (26) 3.5 倾覆传感器 (26) 3.6 温度传感器 (27) 3.7 光强传感器 (27) 3.8 灰度传感器 (28) 3.9 视觉和语音传感器 (28) 4执行器 (29) 4.1 CDS5516机器人舵机 (29) 4.2 CDS5401大扭矩R/C舵机 (32) 4.3 BDMC1203电机驱动模块 (33) 4.4 Faulhaber大功率减速电机 (34) 5 NorthSTAR 图形化开发环境 (35) 5.1 安装及使用介绍 (35) 5.2 使用流程图开发 (39) 5.3 手写代码开发 (46) 5.4 调试与在线监控 (47) 6 其它部件 (54) 6.1 UP-Debugger 下载调试器 (54) 6.2 WiFi 无线网卡或以太网线缆 (55) 6.3 ZigBee无线模组 (56)
创意之星
Inspire your Imagination 创意之星?模块化机器人套件 完全介绍 目录 目录 (1) 1 产品介绍 (2) 1.1 概述和主要特点 (2) 1.2 适用领域 (2) 1.3 创意之星可以构成这些机器人,并且更多! (3) 1.4 产品照片 (6) 2 适合不同用户的三个版本 (7) 2.1 创意之星?机器人套件标准版 (7) 2.2 创意之星?机器人套件入门版 (9) 2.3 创意之星?机器人套件高级版 (11) 3 关键技术介绍 (14) 3.1 创新的结构连接方式 (14) 3.2 MultiFLEX2控制器 (15) 3.3 NorthSTAR软件开发环境 (17) 3.4 机器人舵机 (19) 4 “创意之星”机器人套件组装实例图片 (21)
1 产品介绍 1.1 概述和主要特点 博创科技刚刚推出了最新的UP-InnoSTAR?创意之星?机器人套件产品,以替换上一代“创意之星”产品。该套件是一套用于开展机器人创新实验的模块化机器人套件。分为入门版、标准版和高级版,并有多种配件可选购。 “创意之星?”机器人套件的总体特点类似LEGO Mindstorms?NXT套件,都是具备多种基本“积木”构件的模块化零件套装,包括多种数百个结构零件,一个控制器,多个电机、舵机执行器,多种传感器,以及电池、电缆等附件。用这些“积木”可以搭建出各种发挥想象力的机器人模型来。 所不同的是,“创意之星?”机器人套件主要为创作机器人而设计。具备32位520MHz 的处理器,可处理视频、语音、大容量存储;支持最多254个CDS5500总线式舵机(也可作减速电机使用,指令兼容Robotis的Dynamixel AX12+),并同时具备多个I/O和A/D转换器,以及USB、Wi-Fi等端口。另外,机器人的结构件和创新的连接方式专为创作机器人而设计,连接刚度和结构强度不逊色于铝合金构件,并且连接非常方便。 这样的一套机器人套件可以搭建出无数种机器人构型! “创意之星?”机器人套件配有《构型搭建指南》和《机器人编程实验指导书》等文档,并提供所有构件的3D模型,以及20多种典型构型的装配体3D模型,便于用户学习,并可用于搭建虚拟样机。通过多种典型的机器人构型及其控制系统搭建范例,由浅入深的指引学生搭建机器人结构并学习传感、执行、控制原理和应用,学习机器人控制算法,并发挥创造力,搭建出独特的机器人样机。 “创意之星?”机器人套件具有多种开发方式。初学者可以使用流程图编程软件来给机器人编程;高级用户则可以使用C语言来编程,并可以使用软示波器、3D仿真工具来设计机器人行为,具有极高的透明度和灵活性。 在标准版和高级版两个版本中,还提供MultiFLEX?2控制卡的电路图和参考源程序,以便学生用C语言编写复杂的机器人程序,也可制作自己的机器人控制器。用户可以根据我们提供的技术资料搭建3D虚拟样机、开发自己的机器人控制卡、传感器等等,经由模仿,走向自主创新! 1.2 适用领域 l适合作为大学工科学生的创新实训课程教具和实验器材。 l适合作为大学工科学生的课程设计或者毕业设计平台。 l适合机器人研究者在用于验证理论算法、验证学术论文的结论。 l适合机器人研究者在开发新的机器人之前搭建快速原型,验证原理和可行性。 l适合机器人发烧友用于创作独特的、自己的机器人样机。 l适合初中、高中学生的机器人创作和机器人相关实践活动。
机器人报告
目录 1.无差别擂台机器人 2.双轮平衡小车 3.能够识别并捡起乒乓球的机器人
1.无差别擂台机器人 综述: 老师要求我们搭建一台擂台机器人,具体要求如下: 搭建的机器人长度不超过40厘米,宽度不超过20厘米,高度不超过30厘米。 在黑胶带围成的指定区域里活动,不能出胶带区域,否则失败;需要能够推动对方,将对方推出黑胶带围成的区域即获胜。 要尽量避免自己被推出指定区域,采取一些必要方法。 根据要求,做出以下设计: 要在黑胶带围成的制定区域里活动不超出范围,就需要有传感器进行活动范围边缘的检测。当机器人发现已经靠近边缘时立刻采取行动(停止、掉头或转弯)。黑胶带贴成的区域边缘是与普通地面相比是有灰度变化的,我们可以在机器人底部装上灰度传感器,探头向下,来判读机器人覆盖区域的灰度变化,从而判读机器人相对场地的方向。可以通过整体灰度值来判读机器人位置是不是靠近边缘,如果机器人靠近边缘就马上做出相应动作。 要能够发现对方。能够发现对方的实现方法很多,这里我们采用红外接近传感器来发现对手。 要能够将对方推下擂台。首先考虑推到对方机器人要进行的过程:首先要发现对方,其次贴上去推动对方。要推动对方必须要有足够的动力。增加动力,可以考虑:1.增加驱动轮(由四个增加为六个甚至更多);2.增加摩擦力(用胎面宽的轮胎,增加轮子数量,增加机器人重量)。如果动力不足,我们的机器人很可能被对方的机器人推着倒着走,如果摩擦力不够,机器人在推对方的时候轮子会打滑,轮子一直在转,但小车就不能往前走。 需要避免自己被推出指定区域。如果我方机器人在前进过程中北对方机器人从后方推挤,那么对方可以很轻松的把我方机器人推出指定区域。所以要设置相关程序,在察觉到被推挤时能够采取相关手段避开推挤。此外,适当增大机器人与地面摩擦力也对防止自己被推出标定区域以外很有作用。
(完整版)四足步行机器人腿的机构设计毕业设计
毕业设计(论文) 四足步行机器人腿的机构设计 学生姓名: 学号: 所在系部: 专业班级: 指导教师: 日期:
摘要 本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。展示了SolidWorks强大的三维制图和分析功能。同时结合模仿四足动物形态展示出了本次设计。对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。 关键词:SolidWorks;足步行机器人腿
Abstract In this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional. Keywords: SolidWorks; four-legged walking robot
机器人创新实验三实验报告
机器人创新实验三 机器人名称:仿生蛇形机器人四足爬行机器人 实验目的: ①加强对运动中的“创意之星”四足爬行机器人重心变化的理解和认识,将“创意之星”机器人套件进行搭建和装配,构建出一个“创意之星”四足爬行机器人。 ②了解仿生蛇形机器人的概念,仿生蛇形机器人的动作规划,步态规划的基本知识。 ③在保证整个稳定的前提下,将程序写入控制卡,熟悉UP-MRcommander 软件调试机器人运动步态的技巧,熟悉直流电机的控制,并实现提前设定好的动作步骤,并使机器人能够平稳的爬行。 ④熟悉掌握各种搭建元件的使用方法和电机舵机的使用技巧。 ⑤学会对学习知识的应用到实际中的能力,提高自身动手能力。 实验任务: 设计并实现完整的机器人系统,如四足爬行机器人、挖掘机器人、仿生蛇形机器人等,以“创意之星”模块化机器人教学套件为实验平台。 设计方案: 应用创意之星模块化机器人教学套件组装仿生蛇形机器人,UP-MRcommander软件对动作控制实现机器人运动:用四足爬行机器人,并实现前行动作,左前右后向前,左后右前向后,然后左前右后向后,左后右前向前,便能实现四足爬行机器人前行。 了解:博创科技刚刚推出了最新的UP-InnoSTAR? 创意之星?机器人套件产 品,以替换上一代“创意之星”产品。该套件是一套用于开展机器人创新实验的模块化机器人套件。 熟悉四足爬行机器人向前爬行时的运动方式和运动特点。 熟悉舵机动力关节、基本结构件、控制卡、直流电机、传感器、UP-MRcommander,掌握搭建和调试要领。 实验过程:本实验共分为12学时,分为3个阶段。 第一阶段:老师对我们介绍实验内容,对需要用到的配件、软件环境进行讲解,为使我们对实验内容更加熟悉,对软件环境的熟悉。 第二阶段:开始动手阶段,为了能使我们更好的完成创新实验课程,首先进行了对“创意之星”仿生蛇形机器人必备配件舵机的装配工作。
四足机器人系统设计
(此文档为word格式,下载后您可任意编辑修改!) 摘要 四足机器人作为仿生机器人的一种,得到了广泛的研究。行走机构和转弯机构是四足机器人最关键的部分,目前,行走机构的研究大多采用在腿机构的关节处安装伺服电机进行驱动,增加了机器人的重量和控制策略的难度。并且,机器人本体大多是一个刚性整体,转弯机构研究不足。为此,项目将四足机器人本体作为一个柔性整体,采用三维建模软件Pro/E4.0设计了四足机器人的机械系统,提出了一种新颖的凸轮控制驱动式行走机构,设计了一种腿机构以及相应的凸轮控制驱动机构,并初步设计了柔性转弯机构。在此基础上,论文采用主从式控制方式设计了四足机器人的控制系统,重点讨论了以8051单片机为控制器的行走机构和转向机构的控制系统设计。 关键词:四足机器人;行走机构;凸轮驱动;控制系统;三维设计 Abstract Quadruped robot as one of biomimetic robots, has been extensively studied. Travel agencies and institutions is a quadruped robot turning the key, At the present, servo motor is installed in the leg joints of the most travel agencies, increasing the weight of the robot and the difficulty of the control system strategy . And most of the robot is a rigid body as a whole, and the research of the turning institutions is not fully studied . For this purpose, the project will take four-legged robot whole body as a flexible rigid body, and three-dimensional modeling software Pro/E4.0 is used for designing quadruped robot mechanical systems, a new travel agency based on cam control drive is proposed , a kind of leg mechanism and control of the corresponding cam drive mechanism is designed, and a flexible turning institution is preliminary designed. Based on this work, the