排队理论(queueing theory)
自动控制原理实验报告
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
排队系统仿真matlab实验报告
M/M/1排队系统实验报告 一、实验目的 本次实验要求实现M/M/1单窗口无限排队系统的系统仿真,利用事件调度法实现离散事件系统仿真,并统计平均队列长度以及平均等待时间等值,以与理论分析结果进行对比。 二、实验原理 根据排队论的知识我们知道,排队系统的分类是根据该系统中的顾客到达模式、服务模式、服务员数量以及服务规则等因素决定的。 1、 顾客到达模式 设到达过程是一个参数为λ的Poisson 过程,则长度为t 的时间内到达k 个呼叫的概 率 服从Poisson 分布,即e t k k k t t p λλ-=!)()(,?????????=,2,1,0k ,其中λ>0为一常数,表示了 平均到达率或Poisson 呼叫流的强度。 2、 服务模式 设每个呼叫的持续时间为i τ,服从参数为μ的负指数分布,即其分布函数为{}1,0t P X t e t μ-<=-≥ 3、 服务规则 先进先服务的规则(FIFO ) 4、 理论分析结果 在该M/M/1系统中,设 λρμ=,则稳态时的平均等待队长为1Q ρλρ=-,顾客的平均等待时间为T ρ μλ=-。 三、实验内容 M/M/1排队系统:实现了当顾客到达分布服从负指数分布,系统服务时间也服从负指数分布,单服务台系统,单队排队,按FIFO (先入先出队列)方式服务。 四、采用的语言 MatLab 语言 源代码: clear; clc;
%M/M/1排队系统仿真 SimTotal=input('请输入仿真顾客总数SimTotal='); %仿真顾客总数;Lambda=0.4; %到达率Lambda; Mu=0.9; %服务率Mu; t_Arrive=zeros(1,SimTotal); t_Leave=zeros(1,SimTotal); ArriveNum=zeros(1,SimTotal); LeaveNum=zeros(1,SimTotal); Interval_Arrive=-log(rand(1,SimTotal))/Lambda;%到达时间间隔Interval_Serve=-log(rand(1,SimTotal))/Mu;%服务时间 t_Arrive(1)=Interval_Arrive(1);%顾客到达时间 ArriveNum(1)=1; for i=2:SimTotal t_Arrive(i)=t_Arrive(i-1)+Interval_Arrive(i); ArriveNum(i)=i; end t_Leave(1)=t_Arrive(1)+Interval_Serve(1);%顾客离开时间LeaveNum(1)=1; for i=2:SimTotal if t_Leave(i-1) 自动化控制实验报告(DOC 43页) 本科生实验报告 实验课程自动控制原理 学院名称 专业名称电气工程及其自动化 学生姓名 学生学号2013 指导教师 实验地点6C901 实验成绩 二〇一五年四月——二〇一五年五月 线性系统的时域分析 实验一(3.1.1)典型环节的模拟研究 一. 实验目的 1. 了解和掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式 2. 观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响 二.典型环节的结构图及传递函数 方 框 图 传递函数 比例 (P ) K (S) U (S) U (S)G i O == 积分 (I ) TS 1 (S)U (S)U (S)G i O == 比例积分 (PI ) )TS 1 1(K (S)U (S)U (S)G i O +== 比例微分 (PD ) )TS 1(K (S) U (S) U (S)G i O +== 惯性 TS 1K (S)U (S)U (S)G i O += = 环节 (T) 比例 积分 微分 (PI D) S T K S T K K (S) U (S) U (S) G d p i p p i O + + = = 三.实验内容及步骤 观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响.。 改变被测环节的各项电路参数,画出模拟电路图,阶跃响应曲线,观测结果,填入实验报告 运行LABACT程序,选择自动控制菜单下的线性系统的时域分析下的典型环节的模拟研究中的相应实验项目,就会弹出虚拟示波器的界面,点击开始即可使用本实验机配套的虚拟示波器(B3)单元的CH1测孔测量波形。具体用法参见用户手册中的示波器部分。1).观察比例环节的阶跃响应曲线 典型比例环节模拟电路如图3-1-1所示。 图3-1-1 典型比例环节模拟电路 传递函数: 1 (S) (S) (S) R R K K U U G i O= = = ;单位阶跃响应: matlab 单服务台排队系统实验报告 一、实验目的 本次实验要求实现M/M/1单窗口无限排队系统的系统仿真,利用事件调度法实现离散事件系统仿真,并统计平均队列长度以及平均等待时间等值,以与理论分析结果进行对比。 二、实验原理 根据排队论的知识我们知道,排队系统的分类是根据该系统中的顾客到达模式、服务模式、服务员数量以及服务规则等因素决定的。 1、 顾客到达模式 设到达过程是一个参数为λ的Poisson 过程,则长度为t 的时间内到达k 个呼 叫的概率 服从Poisson 分布,即 e t k k k t t p λλ-= !)()(,?????????=,2,1,0k ,其中λ>0为一 常数,表示了平均到达率或Poisson 呼叫流的强度。 2、 服务模式 设每个呼叫的持续时间为i τ,服从参数为μ的负指数分布,即其分布函数为 {}1,0t P X t e t μ-<=-≥ 3、 服务规则 先进先服务的规则(FIFO ) 4、 理论分析结果 在该M/M/1系统中,设λρμ= ,则稳态时的平均等待队长为1Q ρλ ρ= -,顾客 的平均等待时间为 T ρμλ= -。 三、实验内容 M/M/1排队系统:实现了当顾客到达分布服从负指数分布,系统服务时间也服 从负指数分布,单服务台系统,单队排队,按FIFO 方式服务。 四、采用的语言 MatLab 语言 源代码: clear; clc; %M/M/1排队系统仿真 SimTotal=input('请输入仿真顾客总数SimTotal='); %仿真顾客总数;Lambda=0.4; %到达率Lambda; Mu=0.9; %服务率Mu; t_Arrive=zeros(1,SimTotal); t_Leave=zeros(1,SimTotal); ArriveNum=zeros(1,SimTotal); LeaveNum=zeros(1,SimTotal); Interval_Arrive=-log(rand(1,SimTotal))/Lambda;%到达时间间隔Interval_Serve=-log(rand(1,SimTotal))/Mu;%服务时间 t_Arrive(1)=Interval_Arrive(1);%顾客到达时间 ArriveNum(1)=1; for i=2:SimTotal t_Arrive(i)=t_Arrive(i-1)+Interval_Arrive(i); ArriveNum(i)=i; end t_Leave(1)=t_Arrive(1)+Interval_Serve(1);%顾客离开时间LeaveNum(1)=1; for i=2:SimTotal if t_Leave(i-1) 实验报告 课程名称:自动控制原理 实验项目:典型环节的时域相应 实验地点:自动控制实验室 实验日期:2017 年 3 月22 日 指导教师:乔学工 实验一典型环节的时域特性 一、实验目的 1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。 2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。对比差异,分析原因。 3.了解参数变化对典型环节动态特性的影响。 二、实验设备 PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。 三、实验原理及内容 下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。 1.比例环节 (P) (1)方框图 (2)传递函数: K S Ui S Uo =) () ( (3)阶跃响应:) 0()(≥=t K t U O 其中 01/R R K = (4)模拟电路图: (5) 理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。 ② 取R0 = 200K ;R1 = 200K 。 2.积分环节 (I) (1)方框图 (2)传递函数: TS S Ui S Uo 1 )()(= (3)阶跃响应: ) 0(1)(≥= t t T t Uo 其中 C R T 0= (4)模拟电路图 (5) 理想与实际阶跃响应曲线对照: ① 取R0 = 200K ;C = 1uF 。 ② 取R0 = 200K ;C = 2uF 。 1 Uo 0t Ui(t) Uo(t) 理想阶跃响应曲线 0.4s 1 Uo 0t Ui(t) Uo(t) 实测阶跃响应曲线 0.4s 10V 无穷 3.比例积分环节 (PI) (1)方框图: (2)传递函数: (3)阶跃响应: (4)模拟电路图: (5)理想与实际阶跃响应曲线对照: ①取 R0 = R1 = 200K;C = 1uF。 理想阶跃响应曲线实测阶跃响应曲线 ②取 R0=R1=200K;C=2uF。 K 1 + U i(S)+ U o(S) + Uo 10V U o(t) 2 U i(t ) 0 0 .2s t Uo 无穷 U o(t) 2 U i(t ) 0 0 .2s t 排队系统仿真实验报告 1 实验题目 考虑一个排队系统,顾客到达后若无空闲服务台则等待,否则接受服务后离开,仿真目的是统计服务台前的平均队长和服务台的忙闲程度,要求能利用离散事件仿真的方法对该系统进行仿真,系统的规则和参数自定。 2 实验原理 离散事件驱动的模型只在一些离散点上由事件改变其状态,故离散事件模型是由事件驱动的。驱动某一模型的所有事件按其发生的时间先后构成一个序列,通常要求按时间先后顺序处理事件,而不能颠倒。离散事件系统仿真的关键是按时间顺序确定这一序列。除初始事件,事件序列中的事件不能在仿真前事先确定,而是在仿真进行中产生,离散事件系统仿真中一般采用事先策划事件的方式,即在仿真系统处理任何事件之前该事件必须已被策划。确定事件发生的时间的方式有三类:直接方式、间接方式、混合方式。从事件、活动、进程三个层次来组织事件即构成了处理离散事件模型的三种典型处理方法:事件调度法、活动扫描法、进程交互法。本次实验针对排队系统采用事件调度法,仿真策略如图1所示: 图1事件调度法仿真排队系统流程图 3 仿真程序 #include 自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3 系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3 排队论实验报告 《排队现象的建模、解析与模拟》 课程设计 姓名: 学号: 班级: 题目描述:排队系统的稳定性与什么有关?与系统的一步概率转移矩阵有什么关系?收敛速度快慢与什么有关? 解答过程: (1)初始设定: 设初始状态X=(P1 P2 P3 … Pn),一步状态概率转移矩阵为P ,最终系统趋于稳定的状态为Y=(Y1 Y2 Y3 … Yn),可知X 和Y 是一个固定不变的行向量,且P1+P2+P3+…+Pn=1,Y1+Y2+Y3+…+Yn=1。 (2)描述模型: 对排队系统最终趋于稳定的描述为:Y=X*P n ,n>N(N 是一个足够大的数)。 (3)提出假想: 由(2)中对于系统最终趋于稳定状态的描述,因为X 和Y 都是固定的向量,所以,若系统趋于稳定,则P n 收敛。假设P 最终收敛为 P σ=(a1 a2 ?an ???x1x2?xn ) , 由概率转移矩阵的性质可知各行概率之和为1,即a1+a2+…+an=1。 因为Y* P σ= (Y1 Y2 Y3 … Yn)* (a1 a2 ?an ???x1x2?xn )=Y=(Y1 Y2 Y3 … Yn),故提出猜测:概率转移矩阵收敛后各列的元素值相等。 (4)MATLAB 验证猜想: ① 当n ≥73时收敛: ② 当n≥38时收敛 ③ 当n≥11时收敛 ④ 当n≥3时收敛 ⑤ P本身就是收敛后的结果 (5)结论: 经过一系列验证,得出系统的稳定性只与一步转移概率矩阵P 有关,若P 收敛,则系统趋于稳定,反之系统不稳定。并且P 收敛后行和为1,每列元素值相同。 因为Y* P σ= (Y1 Y2 Y3 …… Yn)* (a1 a2 ?an ???a1a2?an ) =((Y1+Y2+Y3+…Yn)*a1 (Y1+Y2+Y3+…Yn)*a2 … (Y1+Y2+Y3+…Yn)*an) =(a1 a2 … an) 所以最终的概率分布的结果是矩阵收敛后的一行。 收敛速度快慢与一步概率转移矩阵每列元素值的分布有关,若每列元素值分布比较均匀,则收敛速度较快,反之收敛速度较慢。每列元素值相等的矩阵,本身就是收敛后的结果。单位阵是一个特例,它每列元素值不相等,但是单位阵收敛。与单位阵类似的一类矩阵,即 每列有且仅有一个1出现的矩阵,这类矩阵不会收敛。 自动控制原理实验报告 学院: 班级: 姓名: 学号: 西安交通大学实验报告 课程自动控制原理实验日期2014 年12月22 日专业班号交报告日期 2014 年 12月27日姓名学号 实验五直流电机转速控制系统设计 一、实验设备 1.硬件平台——NI ELVIS 2.软件工具——LabVIEW 二、实验任务 1.使用NI ELVIS可变电源提供的电源能力,驱动直流马达旋转,并通过改变电压改变 其运行速度; 2.通过光电开关测量马达转速; 3.通过编程将可变电源所控制的马达和转速计整合在一起,基于计算机实现一个转速自 动控制系统。 三、实验步骤 任务一:通过可变电源控制马达旋转 任务二:通过光电开关测量马达转速 任务三:通过程序自动调整电源电压,从而逼近设定转速 编程思路:PID控制器输入SP为期望转速输出,PV为实际测量得到的电机转速,MV为PID输出控制电压。其中SP由前面板输入;PV通过光电开关测量马达转速得到;将PID 的输出控制电压接到“可变电源控制马达旋转”模块的电压输入控制端,控制可变电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,达到直流电机转速的负反馈控制。 PID参数:比例增益:0.0023 积分时间:0.010 微分时间:0.006 采样率和待读取采样:采样率:500kS/s 待读取采样:500 启动死区:电机刚上电时,速度为0,脉冲周期测量为0,脉冲频率测量为无限大。通过设定转速的“虚拟下限”解决。本实验电机转速最大为600r/min。故可将其上限值设为600r/min,超过上限时,转速的虚拟下限设为200r/min。 改进:利用LabVIEW中的移位寄存器对转速测量值取滑动平均。 《通信网理论基础》 实验二:二次排队问题——M/M/1排队系统的级联一、实验目的 M/M/1是最简单的排队系统,其假设到达过程是一个参数为λ的Poisson过程,服务时间是参数为μ的负指数分布,只有一个服务窗口,等待的位置有无穷多个,排队的方式是FIFO。 M/M/1排队系统的稳态分布、平均队列长度,等待时间的分布以及平均等待时间,可通过泊松过程、负指数分布、生灭过程以及Little公式等进行理论上的分析与求解。 本次实验的目标有两个: 实现M/M/1单窗口无限排队系统的系统仿真,利用事件调度法实现离散事件系统仿真,并统计平均队列长度以及平均等待时间等值,以与理论分析结果进行对 比。 仿真两个M/M/1级联所组成的排队网络,统计各个队列的平均队列长度与平均系统时间等值,验证Kleinrock有关数据包在从一个交换机出来后,进入下一个 交换机时,随机按负指数分布取一个新的长度的假设的合理性。 二、实验原理 1、M/M/1排队系统 根据排队论的知识我们知道,排队系统的分类是根据该系统中的顾客到达模式、服务模式、服务员数量以及服务规则等因素决定的。 设到达过程是一个参数为λ的Poisson过程,则长度为t的时间内到达k个呼叫的概率 )(t P k 服从Poisson 分布,即()()! k t k t P t k e λλ-= ,?????????=,2,1,0k ,其中λ>0为 一常数,表示了平均到达率或Poisson 呼叫流的强度。设每个呼叫的持续时间为 i τ,服从 参数为μ的负指数分布,即其分布函数为 {}1,0t P X t e t μ-<=-≥.服务规则采用先进 先服务的规则(FIFO )。 在该M/M/1系统中,设 λρμ= ,则稳态时的平均队长为[]1E N ρ ρ= -,顾客的平均 等待时间为 1 T μλ= -。 2、 二次排队网络 由两个M/M/1排队系统所组成的级联网络,顾客以参数为λ的泊松过程到达第一个排队系统A ,服务时间为参数为1μ的负指数分布;从A 出来后直接进入第二个排队系统B ,B 的服务时间为参数为 2μ的负指数分布,且与A 的服务时间相互独立。 在该级联网络中,如稳态存在,即 1λμ<且2λμ<,则两个排队系统相互独立,顾客 穿过网络的总时延为各个排队系统的时延之和,即 1211 T μλμλ= + --。 如将该模型应用于数据包穿越网络的平均时延的计算,假设数据包的包长服从负指数分布,平均包长为b ;排队系统A 的信道速率为 1C ,B 的信道速率为2C 。为保证两次排队的 独立性,Kleinrock 假设数据包在从一个交换机出来后,进入下一个交换机时,随机按负指数分布取一个新的长度。 三、 实验内容 -150-100 -50 50 实验一 典型环节的模拟研究及阶跃响应分析 1、比例环节 可知比例环节的传递函数为一个常数: 当Kp 分别为0.5,1,2时,输入幅值为1.84的正向阶跃信号,理论上依次输出幅值为0.92,1.84,3.68的反向阶跃信号。实验中,输出信号依次为幅值为0.94,1.88,3.70的反向阶跃信号, 相对误差分别为1.8%,2.2%,0.2%. 在误差允许范围内可认为实际输出满足理论值。 2、 积分环节 积分环节传递函数为: (1)T=0.1(0.033)时,C=1μf (0.33μf ),利用MATLAB ,模拟阶跃信号输入下的输出信号如图: T=0.1 T=0.033 与实验测得波形比较可知,实际与理论值较为吻合,理论上T=0.033时的波形斜率近似为T=0.1时的三倍,实际上为8/2.6=3.08,在误差允许范围内可认为满足理论条件。 3、 惯性环节 i f i o R R U U -=TS 1 CS R 1Z Z U U i i f i 0-=-=-=15 20 惯性环节传递函数为: K = R f /R 1,T = R f C, (1) 保持K = R f /R 1 = 1不变,观测T = 0.1秒,0.01秒(既R 1 = 100K,C = 1μf , 0.1μf )时的输出波形。利用matlab 仿真得到理论波形如下: T=0.1时 t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3%,读数误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值 较为接近。 T=0.01时 t s (5%)理论值为30ms,实际测得t s =40ms 相对误差为:(40-30)/30=33.3% 由于ts 较小,所以读数时误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值较为接近 (2) 保持T = R f C = 0.1s 不变,分别观测K = 1,2时的输出波形。 K=1时波形即为(1)中T0.1时波形 K=2时,利用matlab 仿真得到如下结果: t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3% 读数误差较大 K 理论值为2,实验值4.30/2.28, 1 TS K )s (R )s (C +-= 《管理系统模拟》课程实验报告 ——银行排队系统仿真建模 学部:管理与经济学部 专业:信息管理与信息系统 课程名称:管理系统模拟 学生:韩玉萍 学号:201003038 班级:管信1002班 任课教师:金淳 目录 1. 仿真模型概述 (3) 1.1 顾客到达数量分析 (3) 1.2 服务时间分析 (3) 1.3 服务机构 (3) 1.4 服务规则 (3) 2. 建立这类银行排队系统的仿真模型的流程及模块设计清单 (4) 1.5 模型假设 (4) 1.6 服务系统流程图如下: (4) 1.7 模块设计清单: (5) 2.3.1 CREATE模块设置 (5) 2.3.2 DECIDE模块设置 (5) 2.3.3 PROCESS模块设置 (6) 2.3.4 RECORD模块设置 (10) 2.3.5 ASSIGN模块设置 (10) 2.3.6 DISPOSE模块设置 (10) 3. 仿真模型 (11) 4. 运行仿真模型及结果分析 (11) 5. 收获及体会 (14) 1. 仿真模型概述 1.1 顾客到达数量分析 顾客的到达通常是一个一个的到达,当然也有批量的到达,但是顾客的到达肯定遵循一定的规律。即顾客的到达时间间隔符合一定的概率分布,比较常用的分布有:泊松分布、爱尔朗分布、等长分布等。而在排队系统中,泊松分布通常是最为广泛的,在这里采用泊松分布,泊松分布函数: {}0,1,2! k e p X K k k λ λ-== =L 是离散型概率函数。 1.2 服务时间分析 顾客是无论是一个一个到达还是批量到达,服务窗口对顾客的服务都是一个一个进行服务的,且对每一个顾客的服务时间不同,若将顾客接受服务的时间一概率分布来描述的,那么常见的分布有:指数分布、爱尔朗分布等。本文则以简单的排队服从指数分布建立模型。 其分布函数为: ()10t F t e t μ-=-≥其中,是指单位时间内的平均服务率 1.3 服务机构 银行的服务机构是指服务台的个数,一般来讲,多服务台并联是银行系统中最为常见的模式。如图1 图1 1.4 服务规则 银行服务系统中遵循的规则常见的是先到先服务,但也不排除拥有优先权顾客抢占先服务,比如,在银行里会设置VIP 客户,但是通常VIP 客户有专门的VIP 服务接待的洽谈室。先到先服务是针对于大部分的顾客所使用的规则。 顾客进入银行,首先分为两大类客户:普通客户和VIP 客户,VIP 客户直接由专门的人员接待,不需要等候,直接进入洽谈室办理银行业务。普通客户需要在叫号机排号相当于但队列多服务台模型。当然在某些银行, 如建设银行也会有 1n n-1 2 股客源 服务台 离开 成绩 北京航空航天大学 自动控制原理实验报告 学院机械工程及自动化学 专业方向工业工程与制造 班级110715 学号11071113 学生姓名吕龙 指导教师 自动控制与测试教学实验中心 实验一一、二阶系统的电子模拟及时域响应的动态测试 实验时间2013.10.30 实验编号同组同学无 一、实验目的 1.了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。 2.学习在电子模拟机上建立典型环节系统模型的方法。 3.学习阶跃响应的测试方法。 二、实验内容 1.建立一阶系统的电子模型,观测并记录不同时间常数T时的跃响应曲线,测定其过渡过程时间Ts。 2.建立二阶系统的电子模型,观测并记录不同阻尼比ζ时的跃响应曲线,测定其超调量σ%及过渡过程时间Ts。 三、实验原理 1.一阶系统: 系统传递函数为: 模拟运算电路如图1-1所示: 图1-1 由图得: 在实验当中始终取, 则, 取不同的时间常数T分别为: 0.25、 0.5、1。 记录不同时间常数下阶跃响应曲线,测量纪录其过渡过程时 ts。(取误差带)2.二阶系统: 其传递函数为: 令,则系统结构如图1-2所示: 图1-2 根据结构图,建立的二阶系统模拟线路如图1-3所示: 图1-3 取,,则及 取不同的值, , ,观察并记录阶跃响应曲线,测量超调量σ%(取误差带),计算过渡过程时间Ts。 四、实验设备 1.HHMN-1型电子模拟机一台。 2.PC 机一台。 3.数字式万用表一块。 4.导线若干。 五、实验步骤 1. 熟悉HHMN-1 型电子模拟机的使用方法,将各运算放大器接成比例器,通电调零。 2. 断开电源,按照实验说明书上的条件和要求,计算电阻和电容的取值,按照模拟线路图搭接线路,不用的运算放大器接成比例器。 3. 将与系统输入端连接,将与系统输出端连接。线路接好后, 经教师检查后再通电。 4.运行软件,分别获得理论和实际仿真的曲线。 5. 观察实验结果,记录实验数据,绘制实验结果图形,填写实验数据表格,完成 第四章交通流理论2 §4-1概述 一、概念 ●交通流理论,是一门用以解释交通流现象或特性的理论,运用数学或物理的方法,从宏观和微观描述交通流运行 规律。 3 二、发展 ●在20世纪30年代才开始发展,概率论方法。 ●1933年,Kinzer.J.P泊松分布用于交通分析的可能性。 ●1936年,Adams.W.F发表数值例题。 ●1947年,Greenshields泊松分布用于交叉口分析。 ●20世纪50年代,跟驰理论,交通波理论(流体动力学模拟)和车辆排队理论。 ●1975年丹尼尔(DanieL lG)和马休(Marthow,J.H)出版了《交通流理论》一书。 ●1983年,蒋璜翻译为中文。人交出版社出版。 ● 4 三、种类 幻灯片5§4-1概述 ●交通流量、速度和密度的相互关系及量测方法; ●交通流的统计分布特性; ●排队论的应用; ●跟驰理论; ●驾驶员处理信息的特性; ●交通流的流体力学模拟理论;. ●交通流模拟。§4-2交通流的统计分布特性 一、交通流统计分布的含义与作用 ●离散型分布: ●在某固定时段内车辆到达某场所的波动性;(也可描述某一路段上所拥有车辆数的分布特性)。 ●泊松分布/二项分布/负二项分布 ●连续型分布: ●研究上述事件发生的间隔时间的统计特性,如车头时距的概率分布。 ●负指数分布/移位负指数分布/爱尔朗分布 7 二、离散型分布 幻灯片8§4-2交通流的统计分布特性 ●在一定的时间间隔内到达的车辆数,或在一定的路段上分布的车辆数,是所谓的随机变数,描述这类随机变数的 1. 泊松分布 统计规律用的是离散型分布4-2 交通流的统计分布特性 (1) 适用条件 作业调度实验 一.实验目的及要求: 用高级语言编写和调试一个或多个作业调度的模拟程序,以加深对作业调度算法的理解。 二. 实验环境: 操作系统:Windows XP 编译环境:Visual C++ 6.0 三.算法描述 由于在单道批处理系统中,作业一投入运行,它就占有计算机的一切资源直到作业完成为止,因此调度作业时不必考虑它所需要的资源是否得到满足,它所占用的 CPU时限等因素。 作业调度算法:采用先来先服务(FCFS)调度算法,即按作业提交的先后次序进行调度。总是首先调度在系统中等待时间最长的作业。 每个作业由一个作业控制块JCB表示,JCB可以包含如下信息:作业名、提交时间、所需的运行时间、所需的资源、作业状态、链指针等等。 作业的状态可以是等待W(Wait)、运行R(Run)和完成F(Finish)三种状态之一。每个作业的最初状态总是等待W。 各个等待的作业按照提交时刻的先后次序排队,总是首先调度等待队列中队首的作业。 每个作业完成后要打印该作业的开始运行时刻、完成时刻、周转时间和带权周转时间,这一组作业完成后要计算并打印这组作业的平均周转时间、带权平均周转时间。 四. 实验步骤: 1.、作业等待算法:分别采用先来先服务(FCFS),最短作业优先(SJF)调度算法。 对每种调度算法都要求打印每个作业开始运行时刻、完成时刻、周转时间、带权周转时间。 2.程序流程图 3、程序源码结构: void main() { void fcfs(); void sjf(); ... while(1){ printf("\n\t\t/* 1、fcfs */"); printf("\n\t\t/* 2、sjf */"); printf("\n\t\t/* 0、Exit */\n"); printf("\n\n\t请选择:\t"); scanf("%d",&a); printf("\n"); switch(a){ case 1: fcfs();break; case 2: sjf();break; default: break; } if(a!=1&&a!=2) break; } } 自动控制原理 实验报告 实验一典型系统的时域响应和稳定性分析 (2) 一、实验目的 (3) 二、实验原理及内容 (3) 三、实验现象分析 (5) 方法一:matlab程序 (5) 方法二:multism仿真 (12) 方法三:simulink仿真 (17) 实验二线性系统的根轨迹分析 (21) 一、确定图3系统的根轨迹的全部特征点和特征线,并绘出根轨迹 (21) 二、根据根轨迹图分析系统的闭环稳定性 (22) 三、如何通过改造根轨迹来改善系统的品质? (25) 实验三线性系统的频率响应分析 (33) 一、绘制图1. 图3系统的奈氏图和伯德图 (33) 二、分别根据奈氏图和伯德图分析系统的稳定性 (37) 三、在图4中,任取一可使系统稳定的R值,通过实验法得到对应的伯德图,并据此导 出系统的传递函数 (38) 实验四、磁盘驱动器的读取控制 (41) 一、实验原理 (41) 二、实验内容及步骤 (41) (一)系统的阶跃响应 (41) (二) 系统动态响应、稳态误差以及扰动能力讨论 (45) 1、动态响应 (46) 2、稳态误差和扰动能力 (48) (三)引入速度传感器 (51) 1. 未加速度传感器时系统性能分析 (51) 2、加入速度传感器后的系统性能分析 (59) 五、实验总结 (64) 实验一典型系统的时域响应和稳定性分 析 一、 实验目的 1.研究二阶系统的特征参量(ξ、ωn )对过渡过程的影响。 2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。 3.熟悉Routh 判据,用Routh 判据对三阶系统进行稳定性分析。 二、 实验原理及内容 1.典型的二阶系统稳定性分析 (1) 结构框图:见图1 图1 (2) 对应的模拟电路图 图2 (3) 理论分析 导出系统开环传递函数,开环增益0 1 T K K = 。 (4) 实验内容 先算出临界阻尼、欠阻尼、过阻尼时电阻R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。在此实验中(图2), s 1T 0=, s T 2.01=,R 200 K 1= R 200 K =? 计算机仿真实验报告 第一题 1.作业内容 应用排队系统流程图,用C语言编制仿真程序,求解以下问题。 修理店只有一个修理工,来修理的顾客到达次数服从泊松分布,平均4人/h;修理时间服从指数分布,平均需6min。试求(随机数发生器采用float lcgrand(int stream) ,种子stream 为自己学号的最后两位。): ①修理店空闲的概率; ②店内有三个顾客的概率; ③店内至少有一个顾客的概率; ④在店内顾客的平均数; ⑤顾客在店内的平均逗留时间; ⑥顾客必须在店内消耗15分钟以上的概率。 统计量实现算法: ①修理店空闲的概率; p1=1-area_server_status/sim_time area_server_status:总服务时间(即修理工在这段仿真时间里非空闲时间) sim_time:总仿真时间 用1减去非空闲概率,即为空闲概率。 ②店内有三个顾客的概率; p2=Three_people_time/sim_time 增加变量Three_people_time,即有三个顾客在店内的时间。 三个顾客在店里,也就是说一个顾客在理发,两个人在排队,此时,无论是来一个新的客人或者离开一个客人,都会破坏这种三个人的状态,所以我们每次要统计的,就是这种三个人的状态持续的时间。因此,用到的是time_since_last_event这个变量,该变量用于统计两种状态(事件,包括离开和到来)之间的事件。因此,在每次计算完time_since_last_even t之后,考察队伍中的人数是否为2,若为2,则把该段time_since_last_event加到Three_pe 2016~2017学年第一学期《自动控制原理》实验报告 年级:2014级班号: 姓名:He学号: 成绩:教师: 实验设备及编号: 实验同组人名单: 实验地点:电气工程学院自动控制原理实验室实验时间:2016年10月 目录: 实验一典型环节的电路模拟 (3) 一、实验目的 (3) 二、实验内容 (3) 三、实验电路图及参数 (3) 四、实验分析 (10) 五、实验思考题 (11) 实验二二阶系统的瞬态响应 (12) 一、实验目的 (12) 二、实验设备 (12) 三、实验电路图及其传递函数 (12) 四、实验结果及相应参数 (14) 五、实验分析 (16) 六、实验思考题 (16) 实验五典型环节和系统频率特性的测量 (17) 一、实验目的 (17) 二、实验设备 (17) 三、传递函数.模拟电路图及波特图 (17) 四、实验思考题 (22) 实验六线性定常系统的串联校正 (24) 一、实验目的 (24) 二、实验设备 (24) 三、实验电路图及其实验结果 (24) 四、实验分析 (28) 五、实验思考题 (28) 实验七单闭环直流调速系统 (29) 一、实验目的 (29) 二、实验设备 (29) 三、PID参数记录表及其对应图像 (30) 四、PID控制参数对直流电机运行的影响 (37) 实验一典型环节的电路模拟 一、实验目的 1.熟悉THKKL-B 型模块化自控原理实验系统及“自控原理软件”的使用; 2.熟悉各典型环节的阶跃响应特性及其电路模拟; 3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。 二、实验内容 1.设计并组建各典型环节的模拟电路; 2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。 三、实验电路图及参数 1.比例(P)环节 比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。 它的传递函数与方框图分别为: 图1-1比例环节的模拟电路 图中后一个单元为反相器,其中R0=200k。 当U i(S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2 所示。 若比例系数K=1 时,电路中的参数取:R1=100k,R2=100k。自动化控制实验报告(DOC 43页)
matlab单服务台排队系统实验报告
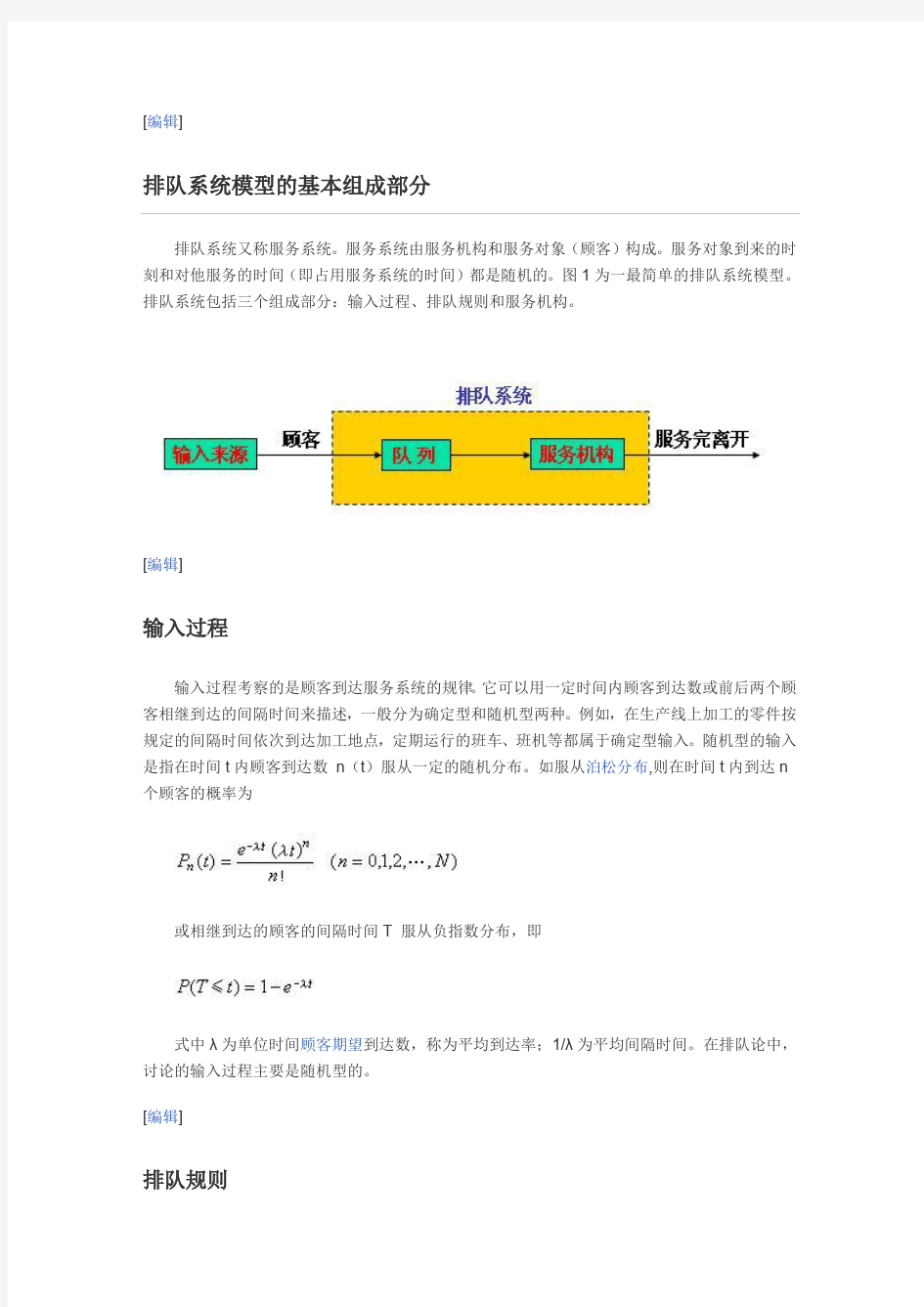
自动控制原理实验报告
排队系统实验报告
北航自动控制原理实验报告(完整版)
排队论
西安交大自动控制原理实验报告
北邮通信网性能分析实验二MM1排队系统实验报告
自动控制原理实验报告73809
系统仿真医院排队
自动控制实验报告.
第四章交通流理论(详细版)
操作系统实验报告-作业调度实验
自动控制原理实验报告
计算机仿真排队系统实验报告(附代码)
武汉大学《自动控制原理》实验报告