遥感特征提取物具体步骤
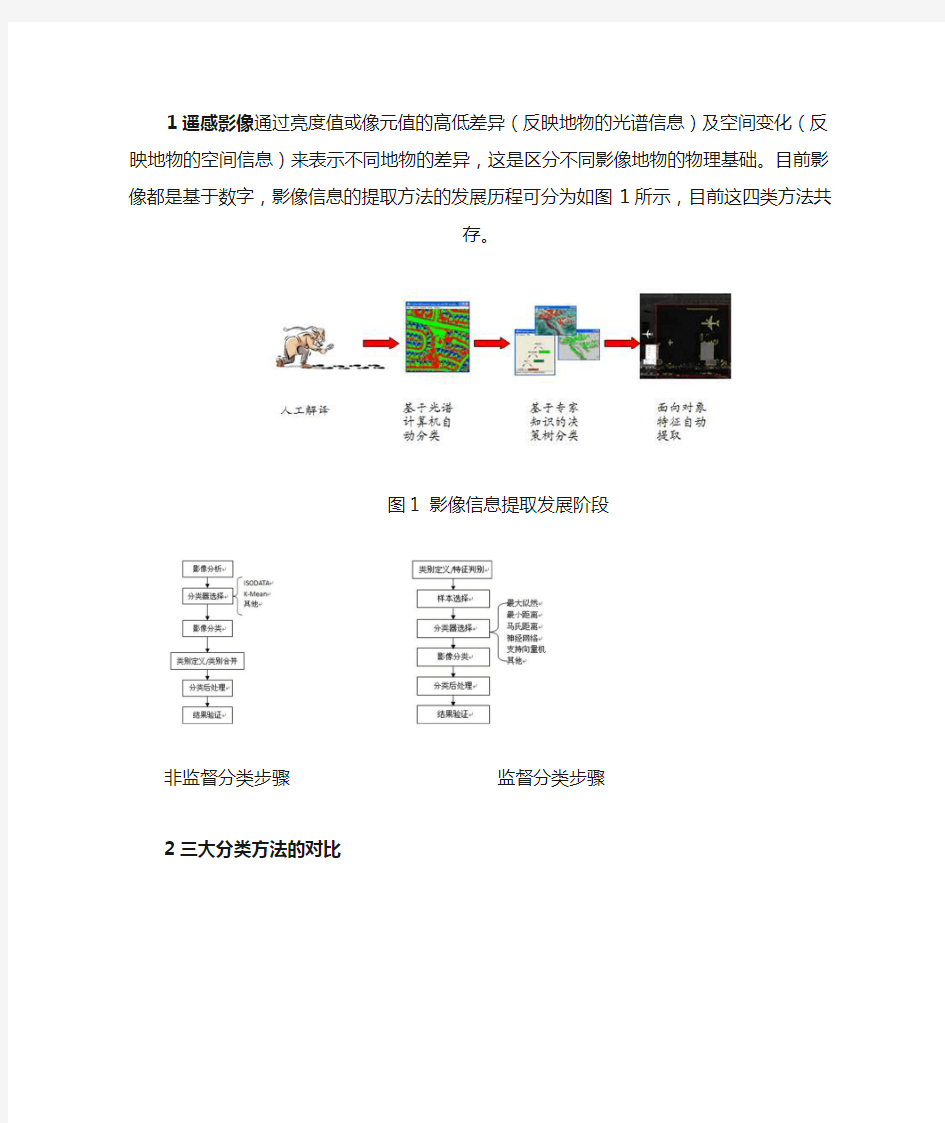
1遥感影像通过亮度值或像元值的高低差异(反映地物的光谱信息)及空间变化(反映地物的空间信息)来表示不同地物的差异,这是区分不同影像地物的物理基础。目前影像都是基于数字,影像信息的提取方法的发展历程可分为如图1所示,目前这四类方法共存。
图1 影像信息提取发展阶段
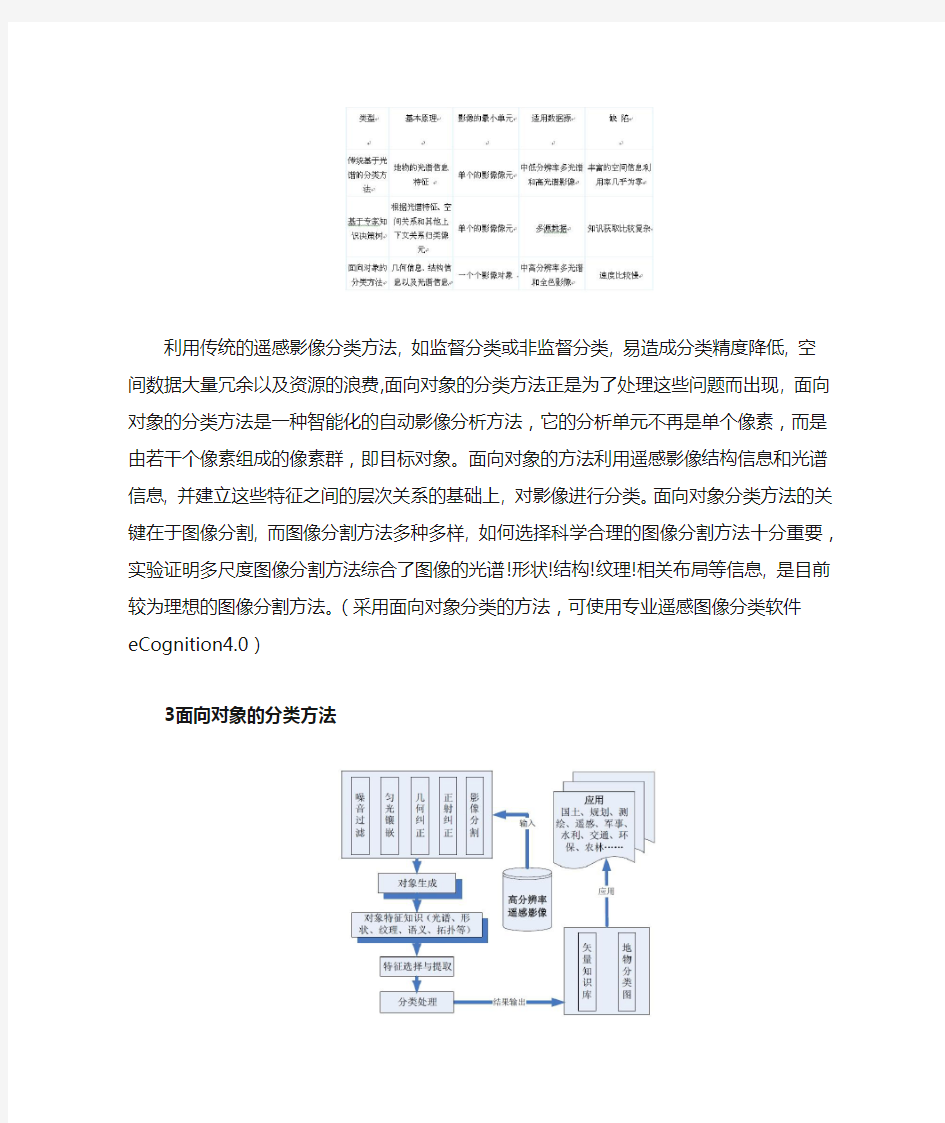
非监督分类步骤监督分类步骤
2三大分类方法的对比
利用传统的遥感影像分类方法, 如监督分类或非监督分类, 易造成分类精度降低, 空间数据大量冗余以及资源的浪费,面向对象的分类方法正是为了处理这些问题而出现, 面向对象的分类方法是一种智能化的自
动影像分析方法,它的分析单元不再是单个像素,而是由若干个像素组成的像素群,即目标对象。面向对象的方法利用遥感影像结构信息和光谱信息, 并建立这些特征之间的层次关系的基础上, 对影像进行分类。面向对象分类方法的关键在于图像分割, 而图像分割方法多种多样, 如何选择科学合理的图像分割方法十分重要,实验证明多尺度图像分割方法综合了图像的光谱!形状!结构!纹理!相关布局等信息, 是目前较为理想的图像分割方法。(采用面向对象分类的方法,可使用专业遥感图像分类软件eCognition4.0)
3面向对象的分类方法
面向对象的技术流程图
3Envi_ENVI FX简介
全名叫“面向对象空间特征提取模块—Feature Extraction”,基于影像空间以及影像光谱特征,即面向对象,从高分辨率全色或者多光谱数据中提取信息,该模块可以提取各种特征地物如车辆、建筑、道路、桥、河流、湖泊以及田地等。该模块可以在操作过程中随时预览影像分割效果。该项技术对于高光谱数据有很好的处理效果,对全色数据一样适用。对于高分辨率全色数据,这种基于目标的提取方法能更好的提取各种具有特征类型的地物。一个目标物体是一个关于大小、光谱以及纹理(亮度、颜色等)的感兴趣区域。
应用于:1】从影像中尤其是大幅影像中查找和提取特征
2】添加新的矢量层到地理数据库
3】输出用于分析的分类影像
4】替代手工数字化过程
ENVI FX的操作可分为两个部分:发现对象(Find Object)和特征提取(Extract features),如图所示
FX操作流程示意图(红色字体为可选项)
具体实现步骤:1)准备工作:有选择的对数据做一些预处理工作
空间分辨率的调整-如果您的数据空间分辨率非常高,覆盖范围非常大,而提取的特征地物面积较大(如云、大片林地等)。可以降低分辨率,提供精度和运算速度。可利用ENVI主界面->Basic Tool->Resize Data工具实现。
光谱分辨率的调整-如果您处理的是高光谱数据,可以将不用的波段除去。可利用ENVI主界面->Basic Tool->layer stacking工具实现。
多源数据组合-当您有其他辅助数据时候,可以将这些数据和待处理数据组合成新的多波段数据文件,这些辅助数据可以是DEM, lidar 影像, 和SAR 影像。当计算对象属性时候,会生成这些辅助数据的属性信息,可以提高信息提取精度。可利用ENVI主界面->Basic Tool->layer stacking
工具实现。
空间滤波-如果您的数据包含一些噪声,可以选择ENVI的滤波功能做一些预处理2)发现对象:(一)打开数据:在ENVI Zoom中打开Processing > Feature Extraction。如下图所示,Base Image 必须要选择,辅助数据(Ancillary Data)和掩膜文件(Mask File)是可选。这里选择ENVI自带数据envidata\feature_extraction \ qb_colorado,它是0.6米的快鸟数据
(二)影像分割:FX根据临近像素亮度、纹理、颜色等对影像进行分割,它使用了一种基于边缘的分割算法,这种算法计算很快,并且只需一个输入参数,就能产生多尺度分割结果。通过不同尺度上边界的差异控制,从而产生从细到粗的多尺度分割。选择高尺度影像分割将会分出很少的图斑,选择一个低尺度影像分割将会分割出更多的图斑,分割效果的好坏一定程度决定了分类效果的精确度,我们可以通过预览分割效果,选择一个理想的分割阀值,尽可能好地分割出边缘特征。
图影像分割阈值设定
调整滑块阀值对影像进行分割,这里设定阈值为30,点击Next按钮,这时候FX生成一个Region Means 影像自动加载图层列表中,并在窗口中显示,它是分割后的结果,每一块被填充上该块影像的平均光谱值。接着进行下一步操作。注:按钮是用来选择分割波段的,默认为Base Image所有波段
(三)合并分块:影像分割时,由于阈值过低,一些特征会被错分,一个特征也有可能被分成很多部分。我们可以通过合并来解决这些问题。FX利用了 Full Lambda-Schedule算法。这一步是可选项,如果不需要可以直接跳过。
设定一定阈值,点Next进入下一步。
(四)分块精炼:FX提供了一种阈值法(Thresholding)进一步精炼分块的方法。对于具有高对比度背景的特征非常有效(例如,明亮的飞机对黑暗的停机坪)。可以将精炼结果生成掩膜图层(Mask),按钮可以修改基于哪个波段。
这里我们就直接选择No Thresholding(default),点击Next进入下一步操作。
(五)计算对象属性:计算4个类别的属性:光谱、空间、纹理、自定义(颜色空间和波段比)。其中“颜色空间”选择三个RGB波段转换为HSI颜色空间,“波段比”选择两个波段用于计算波段比(常用红色和近红外波段)。各个属性的详细描述参考ENVI/IDL提供的Feature_Extraction_Module.pdf文档。
这里我们按照默认全选择,Color Space 选择RGB,Band Ratio选择红色和近红外波段,点击Next按钮进行下一步操作。目前,已经完成了发现对象的操作过程,接下来是特征的提取。
3)特征提取:有三种特征提取方法供选择,分别是监督分类、规则分类和直接矢量输出。
图a特征提取方法选择
(一)输出矢量:选择Export Vectors,进入下图界面,选择保存路径,属性信息也可选择输出。
输出完成会出来一个报表。不关闭FX浮动面板,在ENVI Zoom中将得到的矢量特征加载显示。点击Previous 按钮,回到图a界面。
(二)监督分类: 在图a界面中选择Classify by selection examples,
图b
选择样本:在ENVI Zoom中,切换到Select方式,双击Feature_1,打开一个类别的属性,如下图所示,修改显示颜色、名称等信息。
在分割图上选择一些样本,为了方便样本的选择,可以在ENVI Zoom的图层管理中将原图移到最上层,选择一定数量的样本,如果错选样本,可以在这个样本上点击左键删除。一个类别的样本选择完成之后,新增类别,用同样的方法修改类别属性和选择样本。在选择样本的过程中,可以随时预览结果。可以把样本保存为xml文件以备下次使用。设置样本属性:在图b中,切换到Attributes选项。默认是所有的属性都被选择,可以根据提取的实际地物特性选择一定的属性。
这里我们按照默认全部选择。选择分类方法:在图b中,切换到Algorithm选项。FX提供了两种分类方法:K邻近法(K Nearest Neighbor)和支持向量机(Support Vector Machine ,SVM),如下图所示
这里我们选择K邻近法,K参数设置为5,点击下一步,输出结果。输出结果:特征提取结果可以以两种格式输出,矢量和图像。矢量可以是所有分类以单个文件输出或者每一个类别分别输出;图像可以把分类结果和规则结果分布输出。
这里我们选择单个文件以及属性数据一块输出,分类图像和规则图像一块输出。点击Next按钮完成输出,同时可以看到整个操作的参数和结果统计报表。
分类结果和统计报表
(三)规则分类:在图a界面中选择Classify by creating rules,点击Next,到图c规则分类界面。每一个分类有若干个规则(Rule)组成,每一个规则有若干个属性表达式来描述。规则与规则直接是与的关系,属性表达式之间是并的关系。同一类地物可以由不同规则来描述,比如水体,水体可以是人工池塘、湖泊、河流,也可以是自然湖泊、河流等,描述规则就不一样,需要多条规则来描述。每条规则又有若干个属性来描述,如下是对水的一个描述:面积大于500像素延长线小于0.5 NDVI小于0.3
对道路的描述:延长线大于0.9 紧密度小于0.3 标准差小于20
图c
这里以提取居住房屋为例来说明规则分类的操作过程。首先分析影像中容易跟居住房屋错分的地物有:道路、森林、草地以及房屋旁边的水泥地。双击Feature_1图标,修改好类别的相应属性。 1)第一条属性描述,划分植被覆盖和非覆盖区,双击rule ,打开对象属性选择面板,如图所示。
选择Customized->bandratio。FX会根据选择的波段情况技术波段比值,比如这里在属性计算步骤中选择的Ratio Band是红色和近红外波段,所以此时计算的是NDVI。把Show Attribute Image勾上,可以看到计算的结果,通过ENVI Zoom工具查看各个分割块对应的值。点击Next按钮,或者双击bandratio,进入bandratio属性设置对话框,如图所示
通过拖动滑条或者手动输入确定阈值。Fuzzy Tolerance是设置模糊分类阈值,值越大,其他分割块归属这一类的可能性就越大。归类函数有线性和S-type两种。这里设置模糊分类阈值为默认的5,归属类别为S-type,值的范围为0~0.3,勾选Show Rule Confidence Image可以预览规则图像。点击Ok完成此条属性描述。2)第二条属性描述,去除道路影响,居住房屋和道路的最大区别是房屋是近似矩形,我们可以设置Rect_fit属性。点击按钮或者双击rule ,选择Spatial->rect_fit。设置值的范围是0.5~1,其他参数为默认值。同样的方法设置 Spatial->Area: Fuzzy Tolerance=0, 90
居住房屋规则与效果图
类似的思路可以提取道路、林地、草地等分类,这里就不一一例举。最终结果的输出方式和监督分类一样。4)批处理操作:ENVI提供了ENVI_FX 函数,具体语法如下:
ENVI_DOIT, ’ENVI_FX_DOIT’ [, A_FID=array] [, A_POS=array] [, BR_BANDS=array][, CENTERLINE_OPTIONS=array] [, CONF_THRESHOLD=floating point] [, CS_BANDS=array], DIMS=array, FID=file ID [, /EXPORT_ATTRIBUTES] [, /EXPORT_RASTER] [, /INVERSE_MASK][, KERNEL_SIZE=long integer] [, M_FID=file ID] [, MERGE_LEVEL=floating point], POS=array[, R_FID=variable] [, RASTER_FILENAME=string or string array] [, /RAW_ATTRIBUTES][, RAW_FILENAME=string] [, REFINE_BAND=integer] [, /REFINE_INVERSE] [, /REFINE_MASK][, RULESET_FILENAME=string], SCALE_LEVEL=floating point [, SEGMENT_BANDS=array][, SMOOTHING_THRESHOLD=floating point] [, TD_FILENAME=string][, THRESHOLD_LOWER=floating point] [, THRESHOLD_UPPER=floating point][, VECTOR_FILENAME=string] [, VECTOR_OPTIONS=string array]
详细的变量说明请参考ENVI/IDL提供的Feature_Extraction_Module.pdf。利用此函数可以对根据分割参数和分类参数编写批处理,或者将此功能应用到别的系统上。
从以上的实际操作可以看到,ENVI FX扩展模块操作具有易于操作(向导操作流程),随时预览效果和修改参数;功能比较强大,具有多种特征提取方法,包括监督分类和知识规则分类,等等。
4对比检测(一个地区在不同年份的变化)
4-1用土地利用类型转换(变化)混淆矩阵
定义:不同时间段内同一区域内土地利用类型的相互转换关系,一般用二维表来表达,从二维表中可以快速查看各个地类间相互转化的具体情况。比如某一类别的土地有百分之多少(或者面积)分别转化成了其他的土地类型,现在某类型的土地分别是由过去的哪些类别转化而来的等等。还可以生成变化统计栅格图(掩膜图像),它描述了前后两幅土地分类图之间的地类发生转变的位置和类别。土地利用类型转换矩阵可以从两幅栅格图中计算得到,也可以从两个矢量文件中计算获得。下面介绍在ENVI下从两幅分类结果的栅格图中计算土地利用类型转换矩阵。
步骤:1、准备数据
两个时相的土地利用分类结果,它是单波段、专题类型的伪彩色图像(ENVI Classification)
2、计算转换矩阵
打开两个土地利用分类结果。
(1)在主菜单中,选择Basic Tools → Change Detection → Change Detection Statistics。
(2)分别在Initial State对话框和final state对话框中选择前一时相和后一时相的土地利用结果。
(3)在Define Equivalent Classes对话框中(图1),如果两个土地利用分类名称一致,系统自动将Initial State Class和Final State Class对应,否则手动选择,单击Add Pair按钮选择。
(4)选择对应的地物类型之后,单击OK按钮,出现图2对话框。选择生成图表表示单位(Report Type):像素(Pixels)、百分比(Percent)和面积(Area)。选择Output Classification Mask Images?为YES,输出掩膜图像,选择输入路径及文件名。
(5)单击OK,执行土地利用类型转换矩阵计算过程。
3、查看结果
(1)如图3为得到的土地利用类型转换矩阵结果。横字段表示前一时间段(Initial State)的土地利用类别,纵字段为后一时间段(Final State)的土地利用类别。横字段和纵字段交叉处表示变化值,如有2520900平方米林地用地变化为草地。
2)还可以为每一个地类生成一个变换掩膜图像,图4所示为其中一个地类的掩膜图像。掩膜图像的灰度值表示变化类型,如这里的2{草地}表示林地变化为草地的像元。
4-2利用面向对象的方法对不同年份的同一地区的遥感影像进行分类
地物提取->提取图对比
5-1,建筑物提取系统:国际上发展了一些自动半自动的提取方法, 一些航空影像理解系统中也提供了建筑物提取功能, 比如Nagao 等人研制的二维航空像片理解系统, 还有国内适普公司的VirtuoZo 系统等。。总结起来, 这些方法的主要技术思路有三种: ①以区域分割为基础的区域分析, 如Nago 的航空像片理解系统; 张煜采用几何约束与影像分割相结合的快速半自动房屋提取; 杨益军针对建筑物密度高, 且灰
度值大于背景值的航空影像提出了基于区域分割进行建筑物检测; 巩丹超针对顶部灰度和纹理均匀一致的建筑物也提出了基于分割区域进行边缘追踪的提取思路。②基于角点检测和匹配的方法, 徐芳基于角点检测和匹配的方法设计建筑物的半自动提取,但是没有充分利用房屋的直线边缘信息; 巩丹超针对建筑物边
缘清晰的影像提出了基于边界线检测的建筑物提取。③由于航空摄影测量像片具有优越的提供立体相对的能力, 极大促进了基于多片多视角分析技术的建筑物高度提取以及三维重建, 如著名的3DMOSAIC 系统;
此外
有研究中利用DSM(激光扫描数据或数字摄影测量产品) 或现有GIS 数据等来再辅助获得建筑物高度信息。5-2,道路提取系统:已有研究针对不同影像类型(航空/ 遥感影像) , 不同的比例尺、不同区域的影像(城区/ 乡村/ 郊区) 和不同道路类型(乡村路/ 街道/ 等级公路/ 高速公路) 发展了不同提取方法。但有学者将这些方法总结为四个主要的步骤: ①道路特征的增强, 如滤波和小波变换等。②道路“种子点”确定, 确定可能的道路点。人们提出了各种道路检测算子, 有基于像素分类、边缘检测和模板匹配等方法。
③将种子点扩散成段, 有基于规则的边缘点自动连接, 动态规划和卡尔曼滤波等方法。④道路段的判断与修复, 这一步骤顾及到上下文知识和连接假设生成和假设验证, 地物的语义关系表达, 多源数据的融合等高层次的影像解译方法。目前研究中最主要的难点是综合利用道路相关关联信息和拓扑特性解决道路的自动连接和道路网的提取。也有学者认为由于遥感影像和道路系统的复杂性,在“可预见的将来”完全全自动地提取道路是不太现实的,必须结合人工引导将人的模式认知能力与计算机的快速精确计算能力结合起来, 即所谓的道路半自动提取。
5-3,桥梁目标识别:(采用基于区域的分割)①采用一些预处理方法如增强和二值化等改善分割环境; ②将水域与非水域分割开来; ③利用线条检测的方法如Hough 变换或链码追踪等提取桥梁的边界线。如Jong2hyeok jeong 等利用Hough 变换, 结合水体环境知识, 从IKONOS 影像上提取桥梁目标[ 8 ] , 史册和姜骊黎等基于团块的图像处理思想, 在将桥梁影像二值化或直方图分割后采用BL 算法用链码表达线
特征来提取桥梁。
6,综观以上各种类型地物的提取, 可以总结出: ①大多研究中采用的数据都是一小块包含目标的影像, 即其研究进行的前提是已经存在目标, 而缺少在大尺度影像上搜索和查找可能存在目标的能力, 或者说缺少这样一种多尺度信息提取的策略。②以上研究基本是针对某一特定种类目标而设计和实施, 缺乏一个总体性的技术模型作为指导, 与具体任务联系太紧密, 造成技术的分散化、过度的参数依赖性与不确定性、处理目标的单一性, 因此造成方法普适性较差。当然不同目标其特征和可利用的知识不同, 其提取技术也不可能完全一致, 但对于遥感影像信息提取来说, 有一个统一综观全局的指导思想或策略(比
如说专门针对面状地物或线状地物) 也是很必要的, 更便于这些技术的集成与统一。③许多研究在特征提取后即认为实现了目标的提取, 缺少高层的匹配和推理过程, 不可避免地具有一定的人为性和主观性。④在知识的处理与运用上, 关于地物空间语义关系知识的运用程度还不够, 此外, 目前的推理技术大多采用简单的符号规则推理, 而对于带有不确定性的模糊推理和证据理论推理等的研究和利用还不深入, 这些问题也正是遥感影像高层处理与分析所应首要解决的问题。
7,基于特征基元的高分辨率遥感影像多尺度信息提取技术体系框架首先根据影像光谱或纹理等特征在大尺度上进行粗分割(分类) , 得到目标大区域, 进而在此基础上对可能存在目标的区域或感兴趣的区域(AOI)根据光谱、形状、大小和空间关系等特征进行精细分割, 获得特征基元并进行特征表达,最终实现遥感影像的信息提取和目标识别。
基于特征的高分辨率遥感影像信息提取技术框架
低层处理主要是针对数据而进行的一些基本的影像处理工作, 包括图像的几何校正、恢复、信息增强、信息融合、粗分割等处理。这方面的工作都是基于影像的像元级别进行的。
中层处理的核心目的是基于多特征描述的基元表达, 即基元特征提取。其处理先是是通过图像分割后进行边缘追踪提取基元, 然后对每一个单元对象进行特征提取计算, 从而形成基于特征描述的基元对象集, 在这里用于基元描述的特征不再只限于光谱特征, 还可以包括文理特征、形状特征、邻接特征等视觉特征, 以及其它一些统计特征。
高层处理是遥感信息提取与目标识别技术体系的核心层次。在这里, 主要是在特征基元的基础上, 将不同类型的知识层次化的加入到高层的影像分析理解和目标匹配过程。首先, 通过地物特征描述库中的视觉知识对基于特征描述的空间单元对象进行浅层理解, 得到单个基元所属的地物类型, 在这里, 视觉知识主要包括各种地物对象的空间视觉特征(包括形状、大小、位置、光谱特征和纹理特征等等) 。在基于浅层视觉理解的基础上, 利用环境知识, 比如根据GIS 辅助数据(如高程、坡度等) , 以基于规则推理的方式对各种单个地物信息提取的结果的正确性进行判断, 以得到更加准确的理解结果。并在此基础上, 实现复杂地物信息的提取。首先, 通过对感兴趣的区域进行设定, 通过对区域内进行搜索, 得到可能的地物群。其次, 在地物群内部自动建立拓扑关系, 并通过对单个地物的特征分析建立起彼此间相互的语义关系。通过存储在知识库中的推理过程控制知识控制推理机, 实现对复杂地物的信息提取。
9面向对象的遥感影像处理方法和软件应运而生,主要有美国VLS 公司的Feature Analyst 模块,德国Definiens 公司的eCognition 软件。两个软件都提供了针对高分辨率影像的分类和提取,但前者更侧重于基于机器学习的特征提取,后者更侧重于面向对象的影像分类。从设计原理、软件体系结构、分类算法等方面既存在相似点又存在不同点, Feature Analyst 是一种基于象元的信息提取软件,支持变化检测、三维特征提取、多元数据融合等,但依赖于ERDAS Imagine 或ArcGIS 等运行环境,要求用户同时购买ERDAS Imagine 等软件。eCognition 软件是一种面向对象的信息提取独立软件,不支持变化检测、三维特征提取,操作复杂。在中国巨大的市场需求拉动下, Feature Analyst 和eCognition 已占领了中国的遥感应用市场[1]。国内面向对象的影像分析处于起步阶段,虽然已经成功开发了类似eCognition 的面向对象的软件系统,如上海交通大学的ELU 遥感影像智能解译平台软件,武汉中地数码科技有限公司开发的MAPGIS-RSP 遥感信息提取系统,但这些系统尚处于研究试用阶段,实用化、应用化程度不高,核心技术有待于进一步深入研究[2]。因此,进行面向对象的高分辨率遥感影像分析技术的研究,并开发相应的处理软件已经迫在眉睫。
10
6-遥感图像特征和解译标志
上次课主要内容 4.4简单自然地物可识别性分析 4.5复杂地物识别概率(重点理解) ①要素t 的价值②要素总和(t 1,t 2,…,t m )t 的价值 K -K E ∑ = ③复杂地物识别概率的计算理解p70~71例子
第五章遥感图像特征和解译标志 5.1 解译标志的定义和分类 5.2 遥感图像特征与解译标志的关系 5.3 遥感图像的时空特性 5.4 遥感图像中的独立变量 5.5 地物统计特征的构造
第五章遥感图像特征和解译标志 地物特征 电磁波特性 影像特征 遥感图像记录过程 n 图像解译就是建立在研究地物性质、电磁波性质 及影像特征三者的关系之上 n 图像要素或特征,分“色”和“形”两大类:?色:色调、颜色、阴影、反差; ?形:形状、大小、空间分布、纹理等。“形”只有依靠“色”来解译才有意义。
第五章遥感图像特征和解译标志 5.1 解译标志的定义和分类 n两个定义: ?解译标志定义:遥感图像光谱、辐射、空间和时间特征决定 图像的视觉效果、表现形式和计算特点,并导致物体在图像上 的差别。 l给出了区分遥感图像中物体或现象的可能性; l解译标志包括:色调与色彩、形状、尺寸、阴影、细部(图 案)、以及结构(纹理)等; l解译标志是以遥感图像的形式传递的揭示标志; ?揭示标志定义:在目视观察时借以将物体彼此分开的被感知 对象的典型特征。 l揭示标志包括:形状、尺寸、细部、光谱辐射特性、物体的阴 影、位置、相互关系和人类活动的痕迹; l揭示标志的等级决定于物体的性质、他们的相对位置及与周围 环境的相互作用等;
第五章遥感图像特征和解译标志 5.1 解译标志的定义和分类 n解译标志和揭示标志的关系: ?解译标志是以遥感图像的形式传递的揭示标志; ?虽然我们是通过遥感图像识别地物目标的,但是大多数情况 下,基于遥感图像识别地物并作出决定时,似乎并不是利用解 译标志,而是利用揭示标志。 例如,很多解译人员刚看到图像就差不多在脑海中形成地物的形象, 然后仅仅分析这个形象就能作出一定的决定。实际上,有经验的解译人 员,在研究图像的解译标志并估计到传递信息的传感系统的影响以后, 思想中就建立起地物的揭示标志,并在这些标志的基础上识别被感知物 体。解译人员在实地或图像上都没见过的地物或现象是例外。 n解译标志和揭示标志可以按两种方式进行划分:?直接标志和间接标志; ?永久标志和临时标志;
图像颜色特征提取基本知识
一、颜色特征 1 颜色空间 1.1 RGB 颜色空间 是一种根据人眼对不同波长的红、绿、蓝光做出锥状体细胞的敏感度描述的基础彩色模式,R、 G、B 分别为图像红、绿、蓝的亮度值,大小限定在 0~1 或者在 0~255。 1.2 HIS 颜色空间 是指颜色的色调、亮度和饱和度,H表示色调,描述颜色的属性,如黄、红、绿,用角度 0~360度来表示;S 是饱和度,即纯色程度的量度,反映彩色的浓淡,如深红、浅红,大小限定在 0~1;I 是亮度,反映可见光对人眼刺激的程度,它表征彩色各波长的总能量,大小限定在 0~1。1.3 HSV 颜色模型 HSV 颜色模型依据人类对于色泽、明暗和色调的直观感觉来定义颜色, 其中H (Hue)代表色度, S (Saturat i on)代表色饱和度,V (V alue)代表亮度, 该颜色系统比RGB 系统更接近于人们的经验和对彩色的感知, 因而被广泛应用于计算机视觉领域。 已知RGB 颜色模型, 令M A X = max {R , G, B },M IN =m in{R , G,B }, 分别为RGB 颜色模型中R、 G、 B 三分量的最大和最小值, RGB 颜色模型到HSV 颜色模型的转换公式为: S =(M A X - M IN)/M A X H = 60*(G- B)/(M A X - M IN) R = M A X 120+ 60*(B – R)/(M A X - M IN) G= M A X 240+ 60*(R – G)/(M A X - M IN) B = M A X V = M A X 2 颜色特征提取算法 2.1 一般直方图法
遥感影像判读
南京信息工程大学复习参考资料—— 遥感影像判读 第一章绪论 遥感影像判读既是一门学科,又是图像处理的一个过程: 1.作为一门学科,遥感影像判读的目的是为了从遥感图像上得到地物信息所进行的基础理 论和实践方法的研究 2.作为一个过程,它完成地物信息的传递并起到揭示遥感图像内容的作用,其目的是取得 地物各组成部分和存在于其他地物的内涵的信息 分为计算机辅助判读和人工目视判读 遥感影像判读的任务与实施 任务 根据应用范围:巨型、大型、中型和小型地物与现象的判读 实施(组织方法): 野外判读、飞行器目视判读、室内判读、综合判读 遥感信息的利用方式(5个) 1.瞬时信息的定性分析:确定相关目标是否存在 2.空间信息的定位:空间分布规律 3.瞬时信息的定量分析:定量反演目标参数 4.时间信息的趋势分析:地表物质能量迁移规律 5.多源信息的综合分析 遥感信息的技术支撑(6个) 1.观察与测量仪器的改变 2.产品形式的改变 3.生产工艺的改变 4.新一代传感器的研制 5.地理信息系统的支持 6.遥感应用模型的深化 遥感影像判读的质量要求:分为用户精度(正确分类/所有分为该类制图精度 )和制图者精度(正确分类/参考数据中的该类) 1.判读结果的完整性(详细性):与给定任务的符合程度,用质量指标评价 2.判读的可靠性:与实际的符合程度,用质量和数量指标评价 3.判读的及时性:资料及时;指定限期完成 4.判读结果的明显性:便于理解和应用 第二章遥感影像判读的理论基础 地物的电磁辐射特性—— 地物的电磁辐射特性概念: 1.从近紫外到中红外(0.3-6μm)波段区间能量最集中而且相对来说较稳定 2.被动遥感主要利用可见光、红外等稳定辐射 3.对流层:地表到平均高度12km处,航空遥感活动区,侧重研究电磁波在该层内的传输 特性;
图像特征提取总结
图像常见特征提取方法简介 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一、颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1)颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于:图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。 (4)颜色聚合向量 其核心思想是:将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。(5)颜色相关图 二纹理特征 (一)特点:纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。在模式匹配中,这种区域性的特征具有较大的优越性,不会由于局部的偏差而无法匹配成功。作为一种统计特征,纹理特征常具有旋转不变性,并且对于噪声有较强的抵抗能力。但是,纹理特征也有其缺点,一个很明显的缺点是当图像的分辨率变化的时候,所计算出来的纹理可能会有较大偏差。另外,由于有可能受到光照、反射情况的影响,从2-D图像中反映出来的纹理不一定是3-D物体表面真实
遥感数字图像处理要点
遥感数字图像处理-要点 1.概论 遥感、遥感过程 遥感图像、遥感数字图像、遥感图像的数据量 遥感图像的数字化、采样和量化 通用遥感数据格式(BSQ、BIL、BIP) 遥感图像的模型:多光谱空间 遥感图像的信息内容: 遥感数字图像处理、遥感数字图像处理的内容 遥感图像的获取方式主要有哪几种? 如何估计一幅遥感图像的存储空间大小? 遥感图像的信息内容包括哪几个方面? 多光谱空间中,像元点的坐标值的含义是什么? 与通用图像处理技术比较,遥感数字图像处理有何特点? 遥感数字图像处理包括那几个环节?各环节的处理目的是什么? 2.遥感图像的统计特征 2.1图像空间的统计量 灰度直方图:概念、类型、性质、应用 最大值、最小值、均值、方差的意义 2.2多光谱空间的统计特征 均值向量、协方差矩阵、相关系数、相关矩阵的概念及意义 波段散点图概念及分析 主要遥感图像的统计特征量的意义 两个重要的图像分析工具:直方图、散点图 3.遥感数字图像增强处理 图像增强:概念、方法 空间域增强、频率域增强
3.1辐射增强:概念、实现原理 直方图修正,线性变换、分段线性变换算法原理 直方图均衡化、直方图匹配的应用 3.2空间增强 邻域、邻域运算、模板、模板运算 空间增强的概念 平滑(均值滤波、中值滤波)原理、特点、应用 锐化、边缘增强概念 方向模板、罗伯特算子、索伯尔算子、拉普拉斯算子的算法和特点 ?计算图像经过下列操作后,其中心象元的值: –3×3中值滤波 –采用3×3平滑图像的减平滑边缘增强 –域值为2的3×1平滑模板 –Sobel边缘检测 –Roberts边缘检测 –模板 3.3频率域处理 高频和低频的意义 图像的傅里叶频谱 频率域增强的一般过程 频率域低通滤波 频率域高通滤波 同态滤波的应用
遥感专题讲座——影像信息提取(四、面向对象特征提取)
面向对象的影像分类技术 “同物异谱,同谱异物”会对影像分类产生的影响,加上高分辨率影像的光谱信息不是很丰富,还有经常伴有光谱相互影响的现象,这对基于像素的分类方法提出了一种挑战,面向对象的影像分类技术可以一定程度减少上述影响。 本小节以ENVI中的面向对象的特征提取FX模块为例,对这种技术和处理流程做一个简单的介绍。 本专题包括以下内容: ??●面向对象分类技术概述 ??●ENVI FX简介 ??●ENVI FX操作说明 1、面向对象分类技术概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:影像对象构建和对象的分类。
影像对象构建主要用了影像分割技术,常用分割方法包括基于多尺度的、基于灰度的、纹理的、基于知识的及基于分水岭的等分割算法。比较常用的就是多尺度分割算法,这种方法综合遥感图像的光谱特征和形状特征,计算图像中每个波段的光谱异质性与形状异质性的综合特征值,然后根据各个波段所占的权重,计算图像所有波段的加权值,当分割出对象或基元的光谱和形状综合加权值小于某个指定的阈值时,进行重复迭代运算,直到所有分割对象的综合加权值大于指定阈值即完成图像的多尺度分割操作。 影像对象的分类,目前常用的方法是“监督分类”和“基于知识分类”。这里的监督分类和我们常说的监督分类是有区别的,它分类时和样本的对比参数更多,不仅仅是光谱信息,还包括空间、纹理等信息。基于知识分类也是根据影像对象的熟悉来设定规则进行分类。 目前很多遥感软件都具有这个功能,如ENVI的FX扩展模块、易康(现在叫Definiens)、ERDAS的Objective模块、PCI的FeatureObjeX(新收购)等。 表1为三大类分类方法的一个大概的对比。 类型基本原理影像的最小单元适用数据源缺陷 传统基于光谱的分类方 法地物的光谱信息 特征 单个的影像像元 中低分辨率多光谱 和高光谱影像 丰富的空间信息利 用率几乎为零 基于专家知识决策树根据光谱特征、空 间关系和其他上 下文关系归类像 元 单个的影像像元多源数据知识获取比较复杂 面向对象的分类方法几何信息、结构信 息以及光谱信息 一个个影像对象 中高分辨率多光谱 和全色影像 速度比较慢
遥感数据特征
常用遥感数据特征总结 按照遥感平台类型,遥感技术可以分为航宇遥感、航天遥感、航空遥感、地面遥感四类。其中航天遥感平台发展最快,应用最广。很据航天遥感平台的服务内容,可以将其分为气象卫星系列、陆地卫星系列和海洋卫星系列。不同的卫星系列所获得的遥感数据有着不同的特征,常常应用于不同的应用领域,在进行检测研究时,常常根据不同的卫星资料特点,选择不同的遥感数据。下文简单总结了几种常用的航天遥感数据特征。 1 气象卫星系列 气象卫星是最早发张起来的环境卫星。从1960年美国发射第一颗实验性气象卫星(TIROS)以来,已经有多种实验性或者业务性气象卫星进入不同轨道。气象卫星资料已经在气象预报、气象研究、资源调查海洋研究等方面显示出了强大的生命力。 气象卫星主要有以下几种系列:60年代——TIROS系列、ESSA系列、Nimus 系列;70年代——ITOS系列、NOAA系列、SMS系列、GOES系列、MeteopII、GMS、Meteosat;80年代后,主要以NOAA系列为代表。我国的气象卫星发展比较晚,FY-1是我国发射的第一颗1988年9月7日发射成功。气象卫星主要有以下特征。 (1)轨道。气象卫星轨道可以分为两种,低轨和高轨。低轨是近极低太阳同步轨道,简称极地轨道,轨道高度800~1600km,南北向绕地球运转。对东西宽约2800km的带状地域进行观测,由于与太阳同步,使卫星每天在固定的时间经过每个地方的上空,资料获得时具有相同的照明条件。高轨是指地球同步轨道,轨道高度36000km左右,相对于地球静止,能够观测地球1/4的面积,有3—4颗卫星形成观测网,对某一固定地区,每隔20~30min获取一次资料,由于它相对于地球静止,可以作为通讯中继站,用于传送各种天气资料。 (2)短周期重复观测。地球同步卫星观测周期为0.5小时一次,极轨卫星为约为0.5~1天/次,时间分辨率较高。有助于对地面快速变化的动态检测。 (3)成像面积大,有助于获得宏观同步信息,减少数据处理容量。 (4)资源来源连续、实时性强、成本低 NOAA系列。 NOAA-11卫星:发射日期1988年9月24日,正式运行日期1988年11月8日,轨道高度841公里,轨道倾角98.9度,轨道周期:101.8分。 NOAA-12卫星:发射日期1991年5月14日,正式运行日期1991年9月17日轨道高度804公里,轨道倾角98.6度,轨道周期101.1分。 NOAA-14卫星:发射日期1994年12月30日,正式运行日期1985年4月10日,轨道高度845公里,轨道倾角99.1度,轨道周期101.9分。 NOAA-15卫星:发射日期1998年5月13日,正式运行日期1998年12月15日轨道高度808公里,轨道倾角98.6度,轨道周期101.2分。 NOAA-16卫星:发射日期2000年9月12日,正式运行日期2001年3月20日,轨道高度850公里,轨道倾角98.9度,轨道周期102.1分。
图像纹理检测与特征提取技术研究综述
龙源期刊网 https://www.360docs.net/doc/7615140986.html, 图像纹理检测与特征提取技术研究综述 作者:李秀怡 来源:《中国管理信息化》2017年第23期 [摘要] 图像纹理作为图像数据的重要信息,是符合人类视觉特征的重要信息之一。纹理 检测与特征提取是纹理分类与分割的基础前提,可以应用到医疗、工业、农业、天文等多个领域,也是近几十年来一个经久不衰的热点研究。随着图像处理领域各种技术的发展,纹理特征分析提取方法也得到不断创新。文章在对相关文献进行调研的基础上,叙述了纹理特征提取方法的发展历程及研究现状,并重点对近十年纹理特征提取方法进行了论述,最后指出了该领域的发展趋势及问题。 [关键词] 图像纹理;特征提取;小波;支持向量机 doi : 10 . 3969 / j . issn . 1673 - 0194 . 2017. 23. 088 [中图分类号] TP311 [文献标识码] A [文章编号] 1673 - 0194(2017)23- 0175- 04 1 引言 随着大数据时代的到来,相对于一般数据,图像信息作为一种更直观更形象的数据表现形式,其应用已经深入到医学、工业、航空、农业等各行业领域中。而纹理作为图像的重要特征之一,可以充分反映图像的整体特征,因此也成为了诸多图像后处理技术所必备的研究条件。但是,纹理的复杂多样性使得研究者们对其分析和准确识别是非常困难。而解决这个困难的方法之一是对图像提取纹理,然后对提取的纹理进行分析研究。这也是模式识别、图像检索、和计算机视觉等研究的基础。在纹理研究的每个阶段内,随着国内外学者研究对图像纹理提取模型及算法的不断创新,以及纹理提取的广泛的应用价值,促使着大家对这一领域进行更深入的研究。 2 纹理的基本定义及特性 目前,人们对纹理的精确定义还没有完全统一,当前几个类别的定义基本上按不同的应用类型形成相对的定义。一般认为,纹理是图像色彩或者灰度在空间上的重复或变化形成纹理。通常,人们将组成纹理的基本单元称为纹理基元或纹元(texture element)。 尽管关于纹理的定义尚未统一,但人们对纹理信息所具有的如下特性达成共识: (1)纹理基元是纹理存在的基本元素,并一定是按照某种规律排列组合形成纹理;(2)纹理信息具有局部显著性,通常可以表现为纹理基元序列在一定的局部空间重复出现;(3)纹理有周期性、方向性、密度、强度和粗糙程度等基本特征,而与人类视觉特征相一致的周期
(完整版)图像特征特点及常用的特征提取与匹配方法
图像特征特点及常用的特征提取与匹配方法 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1) 颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2) 颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡 的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3) 颜色矩
遥感卫星影像数据信息提取.
北京揽宇方圆信息技术有限公司 、 遥感卫星影像数据信息提取 北京揽宇方圆信息技术有限公司中科院企业,卫星影像数据服务全国领先。业务包括遥感数据获取与分发、遥感数据产品深加工与处理。按照遥感卫星数据一星多用、多星组网、多网协同的发展思路,根据观测任务的技术特征和用户需求特征,重点发展光学卫星影像、雷达卫星影像、历史卫星影像三个系列,构建由 26个星座及三类专题卫星组成的遥感卫星系统,逐步形成高、中、低空间分辨率合理配置、多种观测技术优化组合的综合高效全球观测和数据获取能力形成卫星遥感数据全球接收与全球服务能力。 (1光学卫星影像系列。 面向国土资源、环境保护、防灾减灾、水利、农业、林业、统计、地震、测绘、交通、住房城乡建设、卫生等行业以及市场应用对中、高空间分辨率遥感数据的需求,提供 worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、 ikonos、pleiades、spot1、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm、 landsat(etm、 rapideye、alos、Kompsat 卫星、北京二号、资源三 号、高分一号、高分二号等高分辨率光学观测星座。围绕行业及市场应用对基础地理信息、土地利用、植被覆盖、矿产开发、精细农业、城镇建设、交通运输、水利设施、生态建设、环境保护、水土保持、灾害评估以及热点区域应急等高精度、高重访观测业务需求,发展极轨高分辨率光学卫星星座,实现全球范围内精细化观测的数据获取能力。像国产的中分辨率光学观测星座。围绕资源调查、环境监测、防灾减灾、碳源碳汇调查、地质调查、水资源管理、农情监测等对大幅宽、快速覆盖和综合观测需求,建设高、低轨道合理配置的中分辨率光学卫星星座,实现全球范围天级快速动态观测以及全国范围小时级观测。
图像特征特点及其常用的特征提取与匹配方法
图像特征特点及其常用的特征提取与匹配方法 [ 2006-9-22 15:53:00 | By: 天若有情 ] 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1)颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于:图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(m ean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。(4)颜色聚合向量 其核心思想是:将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。 (5)颜色相关图 二纹理特征 (一)特点:纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。在模式匹配中,这种区域性的特征具有较大的优越性,不会由于局
Gabor纹理特征
利用Gabor滤波器组提取图像纹理特征 本部分将包含以下四个方面:纹理特征提取方法综述、Gabor滤波器简介、Gabor滤波器组实现纹理特征提取的步骤与实现、存在的问题与改进策略。 1、纹理特征提取方法综述[1] 纹理没有准确的定义,但对纹理认识的共识是:①纹理不同于灰度和颜色等图像特征,它通过像素及其周围空间邻域的灰度分布来表现,即局部纹理信息;②局部纹理信息不同程度的重复性,即全局纹理信息。 按照纹理特征提取方法所基于的基础理论和研究思路的不同,并借鉴非常流行的Tuceryan和Jain的分类方法,将纹理特征提取方法分为四大家族:统计家族、模型家族、信号处理家族和结构家族。 统计家族的方法是基于像元及其邻域的灰度属性,研究纹理区域中的统计特性,或像元及其邻域内的灰度的一阶、二阶或高阶统计特性;在模型家族中,假设纹理是以某种参数控制的分布模型方式形成的,从纹理图像的实现来估计计算模型参数,以参数为特征或采用某种分类策略进行图像分割,因此模型参数的估计是该家族方法的核心问题;信号处理的方法是建立在时、频分析与多尺度分析基础之上,对纹理图像中某个区域内实行某种变换后,再提取保持相对平稳的特征值,以此特征值作为特征表示区域内的一致性以及区域间的相异性;结构家族的方法基于“纹理基元”分析纹理特征,着力找出纹理基元,认为纹理由许多纹理基元构成,不同类型的纹理基元、不同的方向及数目等,决定了纹理的表现形式。信号处理家族的方法从变换域提取纹理特征,其他3个家族直接从图像域提取纹理特征。各个家族的方法既有区别,又有联系。 利用Gabor滤波器组提取图像纹理特征,如图所示,可以归结为信号处理家族中小波方法的一个分支。
图像纹理特征提取方法
安徽大学 本科毕业论文(设计、创作) 题目:图像纹理特征提取方法研究 学生姓名:朱邵成学号:Z01114175 院(系):电气工程与自动化学院专业:自动化 入学时间:2011年9月 导师姓名:寻丽娜职称/学位:讲师/博士 导师所在单位:安徽大学电气工程与自动化学院 完成时间:2015年5月
图像纹理特征提取方法研究 摘要 近年来,随着信息多媒体时代的到来,以及网络在世界范围内的日益流行、云计算的风行,人们在日常生活工作接触的信息量越来越大。图像作为信息的一种载体,具有直观、信息量大、便于不同国家间交流的特点,是网络多媒体的重要组成部分。基于文本的图像检索是基于内容图像检索的基础,用人工方式解释图像信息,其工作量我们难以想象,可行性也值得商榷。因此CBIR方法有效解决了这一个难题。基于内容的图像检索(CBIR)包括四个阶段,分别是:获取图像、提取特征、分类图像、检索图像。图像检索主要是一个核心问题:选取何种算法提取哪一种图像特征,快速有效的进行图像的区分与检测。纹理特征的提取是 CBIR 的关键问题之一,本论文也是基于图像纹理特征的提取为基础。首先,本文使用基于纹理基元的共生矩阵分析方法,用来提取纹理特征向量。此方法中,采用局部二进制模式(Local Binary Pattern,LBP)来进行图像的基本纹理基元的提取,并用灰度共生矩阵(Gray Level Co.occurrence Matrix,GLCM)中共生矩阵的分析方法来对纹理基元图像进行分析。其次文中深入研究了基于灰度共生矩阵( GLCM) 的纹理特征提取方法,给出了基于 Matlab 的简便实现代码,分析了共生矩阵各个构造参数对构造共生矩阵的影响。分析结果对优化灰度共生矩阵的构造、实现基于灰度共生矩阵( GLCM) 的特定图像的纹理特征提取等都具有重要参考意义。 关键词:纹理特征;灰度共生矩阵;基于内容的图像检索;Matlab
图像纹理特征提取方法
图像纹理特征提取方法
安徽大学 本科毕业论文(设计、创作) 题目:图像纹理特征提取方法研究 学生姓名:朱邵成学号:Z01114175 院(系):电气工程与自动化学院专业:自动化 入学时间:2011年9月 导师姓名:寻丽娜职称/学位:讲师/博士 导师所在单位:安徽大学电气工程与自动化学院 完成时间:2015年5月
图像纹理特征提取方法研究 摘要 近年来,随着信息多媒体时代的到来,以及网络在世界范围内的日益流行、云计算的风行,人们在日常生活工作接触的信息量越来越大。图像作为信息的一种载体,具有直观、信息量大、便于不同国家间交流的特点,是网络多媒体的重要组成部分。基于文本的图像检索是基于内容图像检索的基础,用人工方式解释图像信息,其工作量我们难以想象,可行性也值得商榷。因此CBIR方法有效解决了这一个难题。基于内容的图像检索(CBIR)包括四个阶段,分别是:获取图像、提取特征、分类图像、检索图像。图像检索主要是一个核心问题:选取何种算法提取哪一种图像特征,快速有效的进行图像的区分与检测。纹理特征的提取是 CBIR 的关键问题之一,本论文也是基于图像纹理特征的提取为基础。首先,本文使用基于纹理基元的共生矩阵分析方法,用来提取纹理特征向量。此方法中,采用局部二进制模式(Local Binary Pattern,LBP)来进行图像的基本纹理基元的提取,并用灰度共生矩阵(Gray Level Co.occurrence Matrix,GLCM)中共生矩阵的分析方法来对纹理基元图像进行分析。其次文中深入研究了基于灰度共生矩阵( GLCM) 的纹理特征提取方法,给出了基于 Matlab 的简便实现代码,分析了共生矩阵各个构造参数对构造共生矩阵的影响。分析结果对优化灰度共生矩阵的构造、实现基于灰度共生矩阵( GLCM) 的特定图像的纹理特征提取等都具有重要参考意义。 关键词:纹理特征;灰度共生矩阵;基于内容的图像检索;Matlab
遥感图像处理方法
遥感图像处理方法 随着遥感技术的快速发展,人们已经从遥感集市中获得了大量的遥感影像数据,如何从这些影像中提取人们感兴趣的对象已成为人们越来越关注的问题。但是传统的方法不能满足人们已有获取手段的需要,另外GIS的快速发展为人们提供了强大的地理数据管理平台,GIS数据库包括了大量空间数据和属性数据,以及未被人们发现的存在于这些数据中的知识。将GIS技术引入遥感图像的分类过程,用来辅助进行遥感图像分类,可进一步提高了图像处理的精度和效率。如何从GIS数据库中挖掘这些数据并加以充分利用是人们最关心的问题。GIS支持下的遥感图像分析特别强调RS和GIS的集成,引进空间数据挖掘和知识发现(SDM&KDD)技术,支持遥感影像的分类,达到较好的结果,专家系统表明了该方法是高效的手段。 遥感图像的边缘特征提取观察一幅图像首先感受到的是图像的总体边缘特征,它是构成图像形状的基本要素,是图像性质的重要表现形式之一,是图像特征的重要组成部分。提取和检测边缘特征是图像特征提取的重要一环,也是解决图像处理中许多复杂问题的一条重要的途径。遥感图像的边缘特征提取是对遥感图像上的明显地物边缘特征进行提取与识别的处理过程。目前解决图像特征检测/定位问题的技术还不是很完善,从图像结构的观点来看,主要是要解决三个问题:①要找出重要的图像灰度特征;②要抑制不必要的细节和噪声;③要保证定位精度图。遥感图像的边缘特征提取的算子很多,最常用的算子如Sobel算子、Log算子、Canny算子等。 1)图像精校正 由于卫星成像时受采样角度、成像高度及卫星姿态等客观因素的影响,造成原始图像非线性变形,必须经过几何精校正,才能满足工作精度要求一般采用几何模型配合常规控制点法对进行几何校正。 在校正时利用地面控制点(GCP),通过坐标转换函数,把各控制点从地理空间投影到图像空间上去。几何校正的精度直接取决于地面控制点选取的精度、分布和数量。因此,地面控制点的选择必须满足一定的条件,即:地面控制点应当均匀地分布在图像内;地面控制点应当在图像上有明显的、精确的定位识别标志,如公路、铁路交叉点、河流叉口、农田界线等,以保证空间配准的精度;地面控制点要有一定的数量保证。地面控制点选好后,再选择不同的校正算子和插值法进行计算,同时,还对地面控制点(GCPS)进行误差分析,使得其精度满足要求为止。最后将校正好的图像与地形图进行对比,考察校正效果。 2)波段组合及融合 对卫星数据的全色及多光谱波段进行融合。包括选取最佳波段,从多种分辨率融合方法中选取最佳方法进行全色波段和多光谱波段融合,使得图像既有高的空间分辨率和纹理特性,又有丰富的光谱信息,从而达到影像地图信息丰富、视觉效果好、质量高的目的。 3)图像镶嵌 如果工作区跨多景图像,还必须在计算机上进行图像镶嵌,才能获取整体图像。镶嵌时,除了对各景图像各自进行几何校正外,还需要在接边上进行局部的高精度几何配准处理,并且使用直方图匹配的方法对重叠区内的色调进行调整。
图像特征提取总结
图像常见xx方法简介 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一、颜色特征 (一)特点: 颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。 一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。 由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的xx与匹配方法 (1)颜色直方图 其优点在于: 它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于: 它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间: RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:
直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。 在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于: 图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。 (4)颜色聚合向量 其核心思想是: 将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。 (5)颜色相关图 二纹理特征 (一)特点: 纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行
遥感特征提取物具体步骤
1遥感影像通过亮度值或像元值的高低差异(反映地物的光谱信息)及空间变化(反映地物的空间信息)来表示不同地物的差异,这是区分不同影像地物的物理基础。目前影像都是基于数字,影像信息的提取方法的发展历程可分为如图1所示,目前这四类方法共存。 图1 影像信息提取发展阶段 非监督分类步骤监督分类步骤 2三大分类方法的对比 利用传统的遥感影像分类方法, 如监督分类或非监督分类, 易造成分类精度降低, 空间数据大量冗余以及资源的浪费,面向对象的分类方法正是为了处理这些问题而出现, 面向对象的分类方法是一种智能化的自 动影像分析方法,它的分析单元不再是单个像素,而是由若干个像素组成的像素群,即目标对象。面向对象的方法利用遥感影像结构信息和光谱信息, 并建立这些特征之间的层次关系的基础上, 对影像进行分类。面向对象分类方法的关键在于图像分割, 而图像分割方法多种多样, 如何选择科学合理的图像分割方法十分重要,实验证明多尺度图像分割方法综合了图像的光谱!形状!结构!纹理!相关布局等信息, 是目前较为理想的图像分割方法。(采用面向对象分类的方法,可使用专业遥感图像分类软件eCognition4.0) 3面向对象的分类方法
面向对象的技术流程图 3Envi_ENVI FX简介 全名叫“面向对象空间特征提取模块—Feature Extraction”,基于影像空间以及影像光谱特征,即面向对象,从高分辨率全色或者多光谱数据中提取信息,该模块可以提取各种特征地物如车辆、建筑、道路、桥、河流、湖泊以及田地等。该模块可以在操作过程中随时预览影像分割效果。该项技术对于高光谱数据有很好的处理效果,对全色数据一样适用。对于高分辨率全色数据,这种基于目标的提取方法能更好的提取各种具有特征类型的地物。一个目标物体是一个关于大小、光谱以及纹理(亮度、颜色等)的感兴趣区域。 应用于:1】从影像中尤其是大幅影像中查找和提取特征 2】添加新的矢量层到地理数据库 3】输出用于分析的分类影像 4】替代手工数字化过程 ENVI FX的操作可分为两个部分:发现对象(Find Object)和特征提取(Extract features),如图所示
纹理特征
纹理特征 纹理是指存在于图像中某一范围内的形状很小的、半周期性或有规律地排列的图案。在图像判读中使用纹理表示图像的均匀、细致、粗糙等现象。纹理是图像处理和模式识别的主要特征之一。纹理特征是指图像灰度等级的变化,这种变化是与空间统计相关的。图像的纹理特征反应了图像本身的属性,有助于图像的区分。一般的图片都具有丰富、稳定的纹理特征,且利用统计方法方法提取图像的纹理特征具有计算量小的特点。 a.统计法 a)灰度共生矩阵 假定,在一幅图像中规定了一个方向(水平的、垂直的等)和一个距离(一个象素,两个象素等)。那么该物体的共生矩阵P 的第(i,j )个元素值等于灰度级i 和j 在物体内沿该方向相距该指定距离的两个像素上同时出现的次数,除以M ,其中M 是对P 有贡献的像素对的总数。矩阵P 是N ×N 的,其中N 为灰度阴影级的划分数目。 各个共生矩阵可以通过对距离和方向的各个组合来定义。对矩阵有贡献的像素对的总数M ,比物体内部像素的个数少,而且这个数目随着距离的增加逐渐减少。因此,小物体的矩阵会相当稀疏。由于这个原因,灰度级划分N 常常被减少,例如从256级到8级,以便于共生矩阵的计算。 在水平方向上的共生矩阵,如果考虑当前像素的左右方向上的像素,则称为对称共生矩阵,如果只考虑当前像素的右或左方向上的像素,则称为非对称共生矩阵。 例如,设一幅图像的大小为M ×N ,灰度级为L ,G ={0,1,2……., L-1},f(x,y)是坐标(x,y)处像素的灰度级,一幅图像的一个共生矩阵是一个L ×L 矩阵L L ij t T *][,T 中的元素是图像灰度的空间关系,以及按特定方式表示的两灰度间变化的次数。 我们只考虑水平方向的共生矩阵,则对称共生矩阵的定义如下: ∑∑=== M i N j ij k l t 00 ),(δ (3-2) 式中 ?? ?=-==+=j k l f i k l f j k l f i k l f )1,(,),()1,(,),( ;1),(=k l δ (3-3) 否则 0),(=k l δ (3-4) 当只考虑水平方向的右边的像素,则非对称共生矩阵的定义如下: j k l f i k l f =+=)1,(,),( ;1),(=k l δ (3-5) 否则 ;0),(=k l δ (3-6) 我们得到从灰度级i 到j 变化的概率如下:
遥感影像信息提取与分析_沈占锋
计算机世界/2006年/7月/31日/第B15版 技术专题 Taries软件主要应用于对高分辨率遥感影像的各种信息的处理、提取与分析,是具有自主知识产权的软件产品。 遥感影像信息提取与分析 沈占锋 近年来,一系列高分辨率卫星的相继上天,高分辨率卫星遥感的应用也因此成为可能,也凸现出遥感影像数据处理的重要性日益显现。遥感影像数据处理的主要内容就是对遥感数据(主要是高分辨率遥感影像数据)进行自动(半自动)图像处理分析,从而获取人们需要的信息。 Taries软件是具有自主知识产权的软件产品,由中科院遥感所国家遥感应用工程技术研究中心下属的空间信息关键技术研发部开发。Taries软件主要应用于对高分辨率遥感影像的各种信息的处理、提取与分析,其功能包括影像的预处理、影像分割、影像分类、特征提取与表达、特征分析、目标识别等。它是集矢量和栅格于一体化的软件系统。 Taries主要功能 1. 影像处理 (1)采用几何精纠正方法:建立基于空间投影理论与有限控制点的全局自适应方法,并建立基于控制点、线、面特征的局部自适应相结合的影像几何精纠正模型。 (2)实现多源遥感影像信息的特征级融合: 在像元级、高精度的多源遥感信息分析技术基础上,发展了各种特征估计器和融合评判规则,建立特征级的多源遥感信息融合的方法以及相应的算法。 2. 影像信息提取 (1)在复杂环境中的目标信息增强: 采用具有空间自适应能力的目标特征的信息增强模型与方法,特别是弱目标信息的增强方法,并对无关背景信息进行抑制。 (2)高分辨率影像分割: 基于空间特征(包括纹理特征、形状特征和动态特征)以及高维统计特征,采用面向特征的高分辨率影像分割技术(如基于模糊集理论、EM模型、Markov模型、MCMC模型、小波分析等)。 (3)基于智能计算模型的目标特征提取: 基于神经网络、支撑向量机等智能计算模型,研究和发展针对目标的纹理特征、结构特征的提取方法,并实现相应算法。 (4)目标识别与提取系统原型: 采用组件技术,研制开发目标识别与提取软件系统原型,包括影像精处理、目标单元分割与特征提取、目标识别等模块。 3. 矢量数据显示、处理与分析 (1)兼容ArcGIS SHP等矢量数据存储格式,能够采用系统的矢栅一体化数据模型对相应的矢量数据进行读取与显示。 (2)基于底层数据模型,能够实现基于Taries软件的矢量数据的修改功能,包括基本对象(点、线、面)的增、删、改等操作。 (3)基于相应的矢量数据建立拓扑关系,并在此基础上进行相应的空间分析功能(如最优路径查询分析等)。 (4)具有常规的矢量数据显示软件的基本功能,并可在此基础开发进一步的应用(如移动目标定位与车辆跟踪系统等)。 关键技术