永磁无刷直流电动机转矩脉动及其抑制方法

无刷直流电机转矩脉动抑制方法综述
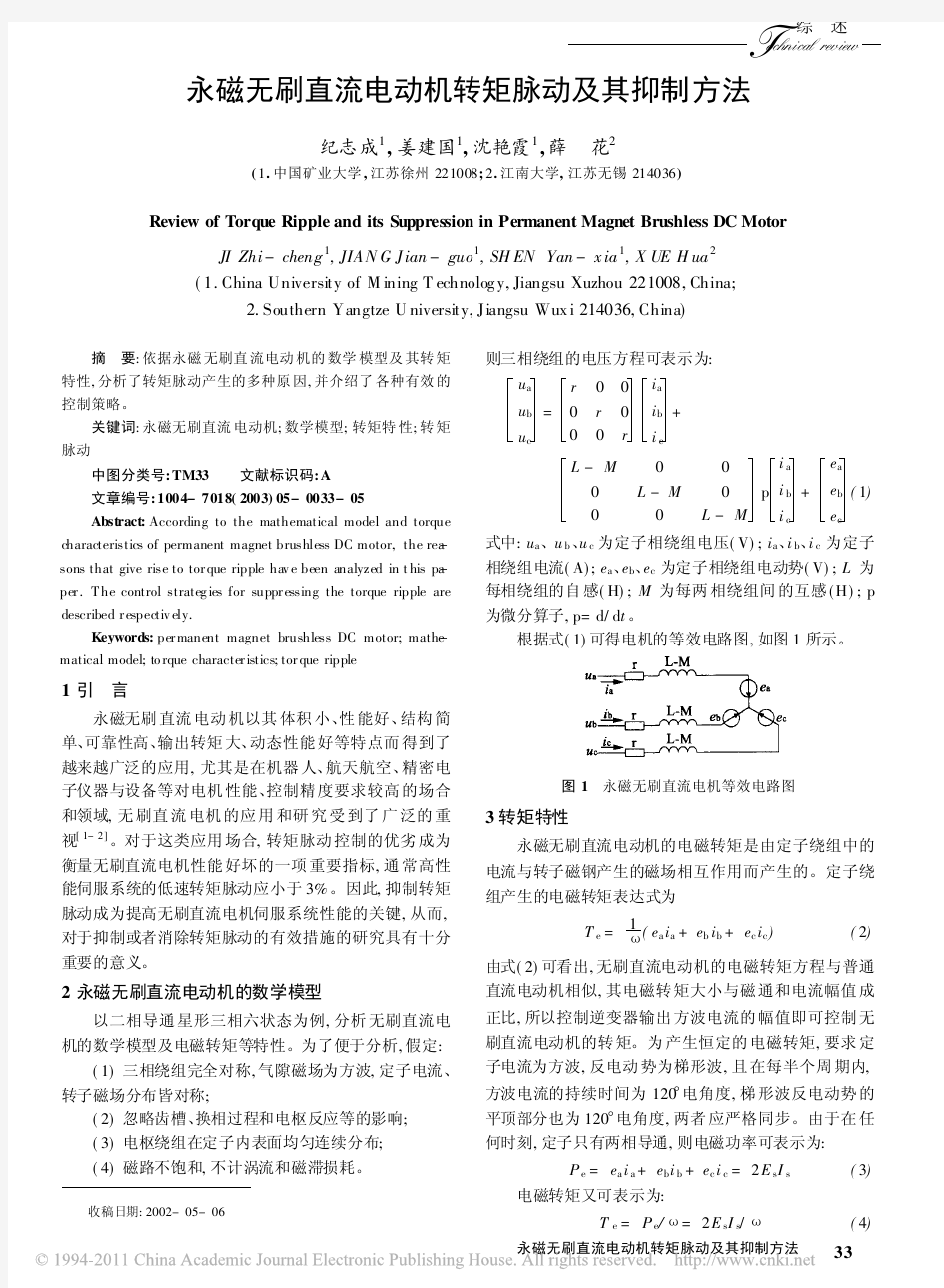
无刷直流电机转矩脉动抑制方法综述 周杰,侯燕 (河南工业大学电气工程学院,450007) 摘要:为扩大无刷直流电机在精度较高的伺服系统中的应用,必须尽量减小其转矩脉动。详细论述了无刷直流电机各种有效的转矩脉动抑制方法,并进行分类归纳。 关键词:无刷直流电机;转矩脉动;综述 中图分类号:TM33 文献标识码:B 文章编号:1004-0420(2007)06-0005-04 The review on torque ripple minimization of brushless DC motors ZHOU Jie,HOU Yan (College of Electrical Engineering,Henan University of Technology,450007) Abstract:To enlarge the application of brushless DC motor in higher accurateness servos,the torque ripple of brushless DC motor must be minimized. Aiming at the torque ripple attenuation of brushless DC motor,many efficient methods were discussed and classified in detail. Key words:brushless DC motor; torque ripple; review 0 引言 近年来,无刷直流电机(BLDCM)以其体积小、结构简单、功率密度高、输出转矩大、动态性能好等特点而得到了广泛应用[1],尤其是在机器人、精密电子仪器与设备等对电机性能、控制精度要求较高的场合和领域,其应用和研究更是受到普遍重视。目前,无刷直流电机最突出的问题就是具有转矩脉动,转矩脉动会直接降低电力传动系统控制特性和驱动
永磁无刷直流电动机的基本工作原理
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
齿槽转矩脉动
齿槽转矩脉动 齿槽转矩是由转子的永磁体磁场同定子铁心的齿槽相互作用,在圆周方向产生的转矩。此转矩与定子的电流无关,它总是试图将转子定位在某些位置。在变速驱动中,当转矩频率与定子或转子的机械共振频率一致时,齿槽转矩产生的振动和噪声将被放大。齿槽转矩的存在同样影响了电机在速度控制系统中的低速性能,和位置控制系统中的高精度定位。解决齿槽转矩脉动问题的方法主要集中在电机本体的优化设计 上。 (1)斜槽法定子斜槽或转子斜极是抑制齿槽转矩脉动最有效且应用广泛的方法之一,该方法主要用于定子槽数较多且轴向较长的电机。实践表明,采用斜槽角度为10°时,齿槽转矩的基波转矩幅值相当于直槽时的90%,3次谐波幅值相当于直槽时的30%,5次谐波幅值相当于直槽时的19%。值得注意的是,为产生恒定的电磁转矩,反电动势波形必须是平顶宽度大于120°的理想梯形波,而斜槽或斜极引起的绕组反电动势的正弦化将会增大电磁转矩纹波。因此,选择合适的斜槽角度是有效抑制齿槽转矩脉动的关键。 (2)分数槽法该方法可以提高齿槽转矩基波的频率,使齿槽转矩脉动量明显减少。但是,采用了分数槽后,各极下绕组分布不对称,从而使电机的有效转矩分量部分被抵消,电机的平均转矩也会因此而相应减 小。 (3)磁性槽楔法采用磁性槽楔法就是在电机的定子槽口上涂压一层磁性槽泥,固化后形成具有一定导磁性能的槽楔。磁性槽楔减少了定子槽开口的影响,使定子与转子间的气隙磁导分布更加均匀,从而减少由于齿槽效应而引起的转矩脉动。由于磁性槽楔材料的导磁性能不是很好,因而对于转矩脉动的削弱程度有限。 (4)闭口槽法闭口槽即定子槽不开口,槽口材料与齿部材料相同。因槽口的导磁性能较好,所以闭口槽比磁性槽楔能更有效地消除转矩脉动。但采用闭口槽,给绕组嵌线带来极大不便,同时也会'大大增加槽漏抗,增大电路的时间常数,从而影响电机控制系统的动态特性。 (5)无齿槽绕组为了消除齿槽转矩脉动,可采用无槽绕组的永磁无刷直流电机,这种结构的电机定子可使用非导磁铁心的无齿槽空心杯定子结构(见图),能够彻底消除了齿槽转矩脉动的影响;但绕组电感显著减小,一般只有几μH到几十μH,因此定子电流中的PWM分量非常明显。
无刷直流电机PWM调制方式与转矩脉动关系研究
无刷直流电机PWM 调制方式与转矩脉动关系研究 收稿日期:2005-04-28 航空科学基金项目(项目编号:04F 53036) 齐 蓉,周素莹,林 辉,陈 明 (西北工业大学,西安 710072) 摘 要:针对无刷直流电机的双斩和四种单斩PW M 调制方式,分析调制方式对电机稳态转矩脉动的影响,建立稳态及换向过程中电机相电流及电磁转矩的数学模型。基于M atlab 无刷直流电机的仿真模型,研究换向转矩脉动与各种单斩P WM 调制方式的关系。 关键词:无刷直流电动机;转矩脉动;仿真;脉宽调制;数学模型 中图分类号:T M 361 文献标识码:A 文章编号:1001-6848(2006)01-0058-04 The Relation Between Torque Ripples and PWM Modes of Brushless DC Motor Q I Ro ng ,ZHOU Su-ying ,LIN Hui,CHEN Ming (N or thwester n Po ly technical U niv ersit y,Xi'an 710072,China) ABSTRACT :T his paper analy zes the differ ent PW M modes (sing le cho p P WM m odes and do uble chop PW M modes )influence on the static to r que ripple in Br ushless DC mo tor (BLD CM )co ntro l sy st em .T he ma thematic models o f phase curr ent and electr omag netic tor que ar e derived.Based on M atlab BL DCM modules,the r elation between fo ur PW M modes(H pw m -L o n,H o n-L pw m,on pwm ,pw m on )and co mmutation tor que ripples a re discussed. KEY WORDS :Br ushless DC M ot or ;T o r que ripples ;Simulatio n ;PW M ;M athematic mo dels 0 引 言 无刷直流电动机(BLDCM )由于转矩脉动较大地限制了其在高精度伺服系统中的进一步应用。因此,分析其转矩脉动产生的原因及过程,寻找抑制转矩脉动的解决办法成为提高BLDCM 伺服性能的关键。 PWM 调制方式通常分为双斩和单斩两大类型。换相转矩脉动及稳态转矩脉动都与PWM 调制方式有关[1-4]。由于BLDCM 相电感的存在使电机换相时产生换相延时,形成电机换向过程中的转矩脉动[5] ,称为换向转矩脉动。本文针对双斩及H pw m -L o n 、H on-L pw m 、on pw m 和pw m on 四种单斩PWM 调制方式,研究电机稳态和换向时的电流和电磁转矩,分析转矩脉动产生的过程,比较各种PWM 调制方式对转矩脉动的影响。 1 PWM 调制方式对稳态电流和转矩 的影响分析 (a )三相六状态 (b ) 双斩调制 (c)H pw m-L o n (d)H on-L pw m (e )o n pwm (f )pw m on 图1 P WM 调制方式的输出波形 当无刷直流电动机反电势为梯形波时,系统采用二二导通,三相六状态的120°导通方式如图1(a)所示,双斩调制方式如图1(b )所示。四种单斩PWM — 58—
直流电机原理与控制方法
专业资料 电机简要学习手册 2015-2-3
一、直流电机原理与控制方法 1直流电机简介 直流电机(DM)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能 (直流发电机)的旋转电机。 它是能实现直流电能和机械 能互相转换的电机。当它作电 动机运行时是直流电动机,将 电能转换为机械能;作发电机 运行时是直流发电机,将机械 能转换为电能。 直流电机由转子(电枢)、定子(励磁绕组或者永磁体)、换向器、电刷等部分构成,以其良好的调速性能以至于在矢量控制出现以前基本占据了电机控制领域的整座江山。但随着交流电机控制技术的发展,直流电机的弊端也逐渐显现,在很多领域都逐渐被交流电机所取代。但如今直流电机仍然占据着不可忽视的地位,广泛用于对调速要求较高的生产机械上,如轧钢机、电力牵引、挖掘机械、纺织机械,龙门刨床等等,所以对直流电机的了解和研究仍然意义重大。 2 直流电动机基本结构与工作原理 2.1 直流电机结构
如下图,是直流电机结构图,电枢绕组通过换向器流过直流电流与定子绕组磁场发生作用,产生转矩。定子按照励磁可分为直励,他励,复励。电枢产生的磁场会叠加在定子磁场上使得气隙主磁通产生一个偏角,称为电枢反应,通常加补偿绕组使磁通畸变得以修正。 2.2 直流电机工作原理 如图所示给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷 A 流入,经过线圈abcd,从电刷 B 流出,根据电磁力定律,载流导体ab和 cd收到电磁力的作用, 其方向可由左手定则判 定,两段导体受到的力 形成了一个转矩,使得 转子逆时针转动。如果 转子转到如上图(b)所 示的位置,电刷 A 和换向片2接触,电刷 B 和换向片1接触,直流电流从电刷 A 流入,在线圈中的流动方向是dcba,从电刷 B 流出。 此时载流导体ab和cd受到电磁力的作用方向同样可由左手定
直流电动机设计方案
直流电动机设计方案 第1章前沿 1.1 课题研究的背景及意义 直流电动机以其良好的起动、制动性能,较宽范围内平滑调速的优点,在许多调速要求较高、要求快速正反向、以蓄电池为电源的电力拖动领域中得到了广泛的应用。近年来,虽然高性能交流调速技术得到了很快的发展,在某些领域交流调速系统已逐步取代直流调速系统。然而直流调速系统系统不仅在理论上和实践上都比较成熟,目前还在应用,比如轧钢机、电气机车等都还有用直流电机;而且从控制规律的角度来看,交流拖动控制系统的控制方式是建立在直流拖动控制系统的基础之上的,从某种意义上说有相似的地方。因此,掌握和了解直流拖动控制系统的控制规律和方法是非常必要的。 从生产机械的要求的角度看,电力拖动控制系统分为调速系统、伺服系统、多电动机同步控制系统、张力控制系统等多种类型。而各种系统大多都是通过控制转速来实现的,因此调速系统是电力拖动控制系统最基本的系统[1]。 从直流电机在国民生产生活中所占位置的角度来看,直流电机目前依旧应用于工业生产中,并广泛应用于人们的生活中。因此直流电机的控制技术的发展很大程度上影响着国民经济的增长,影响着人们的生产生活水平,因此,对直流电机调速系统的研究还是很有必要的。 1.2 课题发展历程及趋势 在很长的一段时间里直流电动机作为最主要的电力拖动工具,其应用已经渗透到人们的工作、学习、生活的各个方面。早期电动机调速控制器主要由模拟器件构成,由于模拟器件存在的固有缺点,比如存在温漂,零漂电压等,使系统控制精度和可靠性降低。后来,随着可编程控制器比如AT89C51,PLC等和IGBT、GTR等电力电子开关器件,传感器技术等的发展使得直流电机调速系统进入了数字控制的阶段,这使得直流电机调速系
直流电机原理与控制方法
电机简要学习手册 2015-2-3
一、直流电机原理与控制方法 1直流电机简介 直流电机(DM)是指能将 直流电能转换成机械能(直流 电动机)或将机械能转换成直 流电能(直流发电机)的旋转 电机。它是能实现直流电能和机械能互相转换的电机。当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。 直流电机由转子(电枢)、定子(励磁绕组或者永磁体)、换向器、电刷等部分构成,以其良好的调速性能以至于在矢量控制出现以前基本占据了电机控制领域的整座江山。但随着交流电机控制技术的发展,直流电机的弊端也逐渐显现,在很多领域都逐渐被交流电机所取代。但如今直流电机仍然占据着不可忽视的地位,广泛用于对调速要求较高的生产机械上,如轧钢机、电力牵引、挖掘机械、纺织机械,龙门刨床等等,所以对直流电机的了解和研究仍然意义重大。
2 直流电动机基本结构与工作原理 2.1 直流电机结构 如下图,是直流电机结构图,电枢绕组通过换向器流过直流电流与定子绕组磁场发生作用,产生转矩。定子按照励磁可分为直励,他励,复励。电枢产生的磁场会叠加在定子磁场上使得气隙主磁通产生一个偏角,称为电枢反应,通常加补偿绕组使磁通畸变得以修正。 2.2 直流电机工作原理 如图所示给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷 A 流入,经过线圈abcd,从电刷 B 流出,根据电磁力定律,载流导体ab和 cd收到电磁力的作用, 其方向可由左手定则判 定,两段导体受到的力 形成了一个转矩,使得 转子逆时针转动。如果 转子转到如上图(b)所
示的位置,电刷 A 和换向片2接触,电刷 B 和换向片1接触,直流电流从电刷 A 流入,在线圈中的流动方向是dcba,从电刷 B 流出。 此时载流导体ab和cd受到电磁力的作用方向同样可由左手定则判定,它们产生的转矩仍然使得转子逆时针转动。这就是直流电动机的工作原理。外加的电源是直流的,但由于电刷和换向片的作用,在线圈中流过的电流是交流的,其产生的转矩的方向却是不变的。 发电机的原理则是电机的逆过程:原动机提供转矩,利用法拉第电磁感应产生直流电流。 如下图,比较清晰的说明了直流电动机的原理。 3直流电机重要特性 如下图,更加清晰的揭示了直流电机电流电压与转速转矩之间的关系。 我们可以得到直流电机的四个基本方程:
无刷直流永磁电动机设计流程和实例
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
直流无刷电动机工作原理控制方法
直流无刷电动机工作原 理控制方法 Document number:PBGCG-0857-BTDO-0089-PTT1998
直流无刷电动机工作原理与控制方法 序言 由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。 一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。其主要类型有同步电动机、异步电动机和直流电动机三种。由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。 针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应 用奠定了坚实的基础。 三相直流无刷电动机的基本组成 直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。图1所示为三相两极直流无刷电机结构, 图1 三相两极直流无刷电机组成 三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。位 置传感器的跟踪转子与电动机转轴相联结。
方波无刷直流电机转矩脉动分析
方波无刷直流电机转矩脉动分析 作 者:中国中铁电气化局集团第二工程有限公司 李 庆 [专家点评] 引言 永磁方波无刷直流电动机具有体积小、重量轻、出力大、控制简单和调速方便等优点,被广泛应用于军事、工业和家电等各行业。但是,方波无刷直流电机转矩脉动大,限制了它在一些场合的应用。转矩脉动主要是由于电磁因素引起的,本文分析了无刷直流电动机转矩脉动的成因,并从系统的观点提出改善转矩脉动的措施。 方波无刷直流电机转矩脉动成因[2] 永磁无刷直流电动机的气隙磁场为方波,相应的逆变装置采用二二导通模式,以保证定子电流波形与气隙磁场波形一致,这样电机转矩脉动最小,几乎为零。但是现实中做到定子电流波形与气隙磁场波形完全一致是不可能的,同时由于电机本身存在定子绕组的换流问题,这就带来了转矩的脉动。从转矩公式 (1) 式中:t e为转矩;为相反电;为相电流;ω角速度;从式中可以看出,转矩脉动主要与定子电流和气隙磁场有关。 定子电流对转矩脉动的影响 控制逆变装置目的就是调整电流,使之尽量接近理想的方波波形,但是由于定子绕组存在电感,使得定子中的电流上升和下降都有个过程,使得定子电流达不到理想方波波形,导致了转矩的脉动。同时由于斩波频率的限制,非换相期间电流的脉动也带来的精度允许范围之内的转矩脉动。 气隙磁场对转矩脉动的影响 电机气隙磁场在设计时是梯形波磁场,但是由于机械加工制造等方面的影响,使得气隙磁场达不到理想的梯形波形,同时由于定子齿槽的存在使得气隙磁场有脉动[1];当电机带负载运行时,定子磁场与转子磁场相互作用,有电枢反应,使得气隙磁场产生畸变,偏离理想梯形波,这也带来了转矩的脉动。 抑制转矩脉动的措施 为了抑制转矩脉动主要从三方面来采取措施: (1)从主回路角度,尽量采用高频器件,提高谐波次数,减少谐波转矩脉动; (2)从控制的角度,采用最佳的逆变器控制模式,尽量增加有效电磁转矩,采用合适的控制方法抑制换流带来的电流脉动导致的转矩脉动;
直流电动机的PWM调压调速原理
直流电动机的PWM调压调速原理 直流电动机转速N的表达式为:N=U-IR/Kφ 由上式可得,直流电动机的转速控制方法可分为两类:调节励磁磁通的励磁控制方法和调节电枢电压的电枢控制方法。其中励磁控制方法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。现在,大多数应用场合都使用电枢控制方法。 对电动机的驱动离不开半导体功率器件。在对直流电动机电枢电压的控制和驱动中,对半导体器件的使用上又可分为两种方式:线性放大驱动方式和开关驱动方式。 线性放大驱动方式是使半导体功率器件工作在线性区。这种方式的优点是:控制原理简单,输出波动小,线性好,对邻近电路干扰小;但是功率器件在线性区工作时由于产生热量会消耗大部分电功率,效率和散热问题严重,因此这种方式只用于微小功率直流电动机的驱动。绝大多数直流电动机采用开关驱动方式。开关驱动方式是使半导体器件工作在开关状态,通过脉宽调制PWM 来控制电动机电枢电压,实现调速。 在PWM调速时,占空比α是一个重要参数。以下3种方法都可以改变占空比的值。 (1)定宽调频法 这种方法是保持t1不变,只改变t2,这样使周期T(或频率)也随之改变。 (2)调频调宽法 这种方法是保持t2不变,只改变t1,这样使周期T(或频率)也随之改变。 (3)定频调宽法 这种方法是使周期T(或频率)保持不变,而同时改变t1和t2。 前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固有频率接近时,将会引起振荡,因此这两种方法用得很少。目前,在直流电动机的控制中,主要使用定频调宽法。 直流电动机双极性驱动可逆PWM控制系统 双极性驱动则是指在一个PWM周期里,作为在电枢两端的脉冲电压是正负交替的。 双极性驱动电路有两种,一种称为T型,它由两个开关管组成,采用正负电源,相当于两个不可逆控制系统的组合。但由于T型双极性驱动中的开关管要承受较高的反向电压,因此只用在低压小功率直流电动机驱动。 另一种称为H型。 H型双极性驱动 一、显示接口模块 方案一:液晶显示器也是一种常用的显示器件。它的优点是功耗低,寿命长,本身无老化问题,显示信息量大(可以显示字母和数字),在显示字符上没有限制。但价格高,接口电路较为复杂。其只在一些(袖珍型)设备上作为显示之用。
转矩脉动抑制
International Journal of Automotive Technology , Vol. 12, No. 2, pp. 291?297 (2011)DOI 10.1007/s12239?011?0034?8 Copyright ?2011KSAE 1229?9138/2011/057?16 291 TORQUE RIPPLE MINIMIZA TION CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTORS FOR EPS APPLICA TIONS G . H. LEE 1), W. C. CHOI 1), S. I. KIM 2), S. O. KWON 2) and J. P . HONG 2)* 1) Graduate School of Automotive Engineering, Kookmin University, Seoul 136-702, Korea 2) Department of Automotive Engineering, Hanyang University, Seoul 133-791, Korea (Received 18 February 2009; Revised 9 August 2010) ABSTRACT ?This paper identifies a control method used to reduce torque ripple of a permanent magnet synchronous motor (PMSM) for an electric power steering (EPS) system. NVH (Noise Vibration Harshness) is important for safe and convenient driving. Vibration caused by motor torque is a problem in column type EPS systems. Maintaining a very low torque ripple is one solution that allows for smoother steering. Theoretically, it is possible to design and drive the motor without torque ripple.However, in reality, a PMSM system torque ripple is caused by the motor itself (saturation in the iron core and EMF distortion)and the imperfect driver. This paper analyzes torque ripple of a PMSM system, and an advanced PMSM control method for the column typed EPS system is presented. Results of the analysis indicate that the compensation current is needed in order to minimize torque ripple when a PMSM is driven. KEY WORDS :Electric power steering, Magnetic saturation, PMSM, Torque ripple, Deadtime, EMF distortion 1. INTRODUCTION Research is being performed to improve the fuel efficiency of vehicles. One of the main areas of focus is on the steering of auxiliary equipment. Electric Power Steering (EPS) is receiving more attention than Hydraulic Power Steering (HYPS). Electric power steering (EPS) is a system that supplies motor power directly to the steering to assist steering torque while HYPS uses an oil pump that is driven by the engine (Shimizu and Kawai, 1991). A permanent magnet synchronous motor (PMSM) has been used to improve the performance of EPS. Since a PMSM has many advantages, such as high efficiency and high torque per rotor volume, it is especially suitable for automotive applications in which space and energy savings are critical (Miyoshi et al ., 2005). In a column type EPS system, the PMSM is linked to the steering shaft via a reduction gear. This connection transfers the motor vibration and torque fluctuation directly through the steering wheel to the hands of the driver (Zhang et al .,2008). For this reason, only the ripple between one and three percent of rated torque is permitted. Several technical papers have presented a motor design andcontrol technique to reduce cogging torque and torque pulsation (Islam et al ., 2005; Mattavelli et al ., 2005; Bianchi et al ., 2002; Lee et al ., 2008). However, this paper discusses an estimation method of compensation current for suppress-ing torque ripple caused by a PMSM (Lee et al ., 2008).In an EPS application, the magnetic saturation in the stator core and distortion of EMF is inevitable due to spatial and cost limitations(Lee, 2010). Imperfections of a low voltage inverter for EPS can be severe. This paper also analyzes torque ripple caused by the motor, deadtime effects, and current offset problems of the PMSM driver.The harmonic current distribution is calculated using finite element analysis, and the effective dead time compensation method is proposed. 2. TORQUE RIPPLE OF PMSM 2.1. Torque Ripple of PMSM for the EPS Figure 1 indicates a fabricated PMSM for the column type EPS system. The rotor configuration was skewed to reduce cogging torque. Segment type and ring type rotors are used for the purpose of this research. The specifications for a PMSM are listed in Table 1. Cogging torque and total harmonic distortion (THD) of a back-EMF required in the motor are less than 0.02 Nm and 0.7% respectively. If the rotor of a SPMSM is composed of segment-type permanent magnets, there is relatively low THD in the back-EMF (0.7%). A ring-type magnet has a higher THD in the back-EMF (2.3%) and an acceptable level of productivity.The torque waveforms of segment and ring magnets are shown in Figure 2. In order to measure torque ripple accurately, the motor is driven at 10 rpm, and input current is controlled with a THD less than 0.5%. As the magnetic torque increases, the electric frequency increases by a *Corresponding author . e-mail: hongjp@hanyang.ac.kr
无刷直流永磁电动机原理
二相三相轮流导通星形三相十二状态 无刷直流永磁电动机工作原理 模型仍然采用星形连接的ABC三组线圈进行励磁,图1是星形接法线圈与电子换向器的连接图,由换向器中六个开关晶体管BG1至BG6组成的桥式电路切换通过ABC三个线圈的电流。例如BG1与BG5导通时电流从A线圈流进B线圈流出;如果BG2与BG4与BG6导通时电流从B线圈流进从A线圈与C线圈并联流出。 新的模型由一个六凸极结构的内定子与两极永磁外转子组成,我们将通过这个模型来展示三个线圈电流的切换顺序,图2是六凸极结构的内定子。
图3是凸极上绕上励磁线圈的定子,线圈的绕向见图5 在定子外周有外转子,外转子有一对永磁体磁极,粘贴在外转子磁軛上,外转子可在定子外周自由旋转,见图4
图5是该模型的正视图,用来表演线圈磁场的切换与转子跟随转动的过程,在六个凸极上绕有线圈,由径向相对的凸极线圈组成一个线圈组,图中黄色的是A组线圈、绿色的是B组线圈、红色的是C组线圈,三个线圈组按星形连接,标有ABC三个字母的是三个线圈的输入端。在外转子磁軛内贴有圆弧状永磁体磁极,蓝色的是N极朝轴心、红色的是S极朝轴心。图5右边是内定子磁场方向箭头,在下面的磁场随开关切换流程图中将附在内定子上旋转,代表定子产生的磁场方向。以此图作动画来演示线圈磁场的切换与转子跟随转动的过程。 根据图1的星形接法线圈与电子换向器的连接图与下面动画的截图来说明开关晶体管是如何控制产生旋转的磁场,图中标注的“红色A+、B+、C+”表示相应线圈与电源正极接通,“蓝色A-、B-、C-”表示相应线圈与电源负极接通。 当开关管BG1、BG5、BG6导通时,电流由A组线圈进B组、C组线圈出,形成的磁场方向向下,规定此时的磁场方向为0度、转子旋转角度为0,见图6左。 当开关管BG1与BG5导通时,电流由A组线圈进B组线圈出,形成的磁场方向顺时针转到30度,转子也随之转到30度,见图6中。 当转子转到30度时,开关管BG1、BG3、BG5导通时,电流由A组与C组线圈进B组线圈出,形成的磁场方向顺时针转到60度,转子也随之转到60度,见图6右。
直流无刷电动机工作原理与控制方法
直流无刷电动机工作原理与控制方法 序言 由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。 一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。其主要类型有同步电动机、异步电动机和直流电动机三种。由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。 针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应用奠定了坚实的基础。 三相直流无刷电动机的基本组成 直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。图1所示为三相两极直流无刷电机结构, 图1 三相两极直流无刷电机组成 三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。位置传感器的跟踪转子与电动机转轴相联结。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 图2为三相直流无刷电动机半控桥电路原理图。此处采用光电器件作为位置传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
直流无刷电动机工作原理及控制方法
由於直流無刷電動機既具有交流電動機の結構簡單、運行可靠、維護方便等一系列優點,又具備直流電動機の運行效率高、無勵磁損耗以及調速性能好等諸多優點,故在當今國民經濟各領域應用日益普及。 一個多世紀以來,電動機作為機電能量轉換裝置,其應用範圍已遍及國民經濟の各個領域以及人們の日常生活中。其主要類型有同步電動機、異步電動機和直流電動機三種。由於傳統の直流電動機均采用電刷以機械方法進行換向,因而存在相對の機械摩擦,由此帶來了噪聲、火化、無線電幹擾以及壽命短等弱點,再加上制造成本高及維修困難等缺點,從而大大限制了它の應用範圍,致使目前工農業生產上大多數均采用三相異步電動機。 針對上述傳統直流電動機の弊病,早在上世紀30年代就有人開始研制以電子換向代替電刷機械換向の直流無刷電動機。經過了幾十年の努力,直至上世紀60年代初終於實現了這一願望。上世紀70年代以來,隨著電力電子工業の飛速發展,許多高性能半導體功率器件,如GTR、MOSFET、IGBT、IPM等相繼出現,以及高性能永磁材料の問世,均為直流無刷電動機の廣泛應用奠定了堅實の基礎。 三相直流無刷電動機の基本組成 直流無刷永磁電動機主要由電動機本體、位置傳感器和電子開關線路三部分組成。其定子繞組一般制成多相(三相、四相、五相不等),轉子由永久磁鋼按一定極對數(2p=2,4,…)組成。圖1所示為三相兩極直流無刷電機結構, 圖1 三相兩極直流無刷電機組成 三相定子繞組分別與電子開關線路中相應の功率開關器件聯結,A、B、C相繞組分別與功率開關管V1、V2、V3相接。位置傳感器の跟蹤轉子與電動機轉軸相聯結。 當定子繞組の某一相通電時,該電流與轉子永久磁鋼の磁極所產生の磁場相互作用而產生轉矩,驅動轉子旋轉,再由位置傳感器將轉子磁鋼位置變換成電信號,去控制電子開關線
无刷直流永磁电动机设计流程和实例
. 无刷直流永磁电动机设计实例 一.主要技术指标 1.额定功率:P N30W 2.额定电压:U N 48,直流 V 3.额定电流:I N1A 3.额定转速:n N10000r/min 4.工作状态:短期运行 5.设计方式:按方波设计 6.外形尺寸:0.0360.065m 二.主要尺寸的确定 1.预取效率0.63、 2.计算功率P i 直流电动机 ' K m P N0.8530 P i40.48W,按陈世坤书。 N 0.63 长期运行 1 2 PN Pi 3 短期运行 1 3 PN Pi 4 3.预取线负荷A s'11000A/m 4.预取气隙磁感应强度B'0.55T 5. 预取计算极弧系数i0.8 6.预取长径比(L/D)λ′=2
Word资料
. 7.计算电枢内径 6.1P i 6.1 40.48 10 2 m D i13 3 1.37 i A s B n N 0.811000 0.55 210000 根据计算电枢内径取电枢内径值D i1 1.4 102 m 8. 气隙长度 0.7 103 m 9. 电枢外径D 1 2.95 102m 10. 极对数p=1 11.计算电枢铁芯长 L D i1 2 1.4 102 2.8 102 m 根据计算电枢铁芯长取电枢铁芯长 L= 2.8102 m 12. 极距 Di13.14 1.410 2 2 m 2p 2 2.2 10 13. 输入永磁体轴向长L m L 2.8102 m 三.定子结构 1. 齿数 Z=6 2. 齿距 D i1 3.141.410 2 10 2 m t 6 0.733 z 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: b t tB 0.733 102 0.55 0.294 10 2 m ,B t 可由 B t K Fe 1.430.96 设计者经验得 1.43T ,b t 由工艺取0.295102 m 5. 预估轭高: h j1 a i B 2.2 0.8 0.55 0.32310 2 m 2lB j1K Fe 2KFeBj1 2 0.96 1.56