小型道路清扫机虚拟设计
小型道路清扫机虚拟设计
机制13 张佳超指导教师崔坚
摘要:路面清扫车是近几年发展起来的路面养护专用车辆,主要用于高等级路面和城市路面以及广场的垃圾清扫。目前,随着我国经济的迅速发展、人们对健康生活环境的需求,大大地推动了道路清扫机械领域上的发展,并且使它获得了持续发展的动力。为了使我国的道路清扫车水平在较短的时间内得到提高,缩小和一些发达国家道路清扫车性能水平上的差距,满足我国环卫部门对城市街道清扫作业的要求,扫路车制造企业应该加大对道路车性能方面的研究。本文介绍了目前国内路面清扫车的现状,分析了除尘装置的基本结构,介绍了除尘装置结构的最新成果及其改进。整车共分为七大系统:底盘系统、副发动机系统、气路系统、液压系统、盘刷总成、副车架总成、车箱结构总成。本设计主要以吸扫式道路清扫车的扫盘、吸盘、联接座研究对象,对吸盘吸风口、联接座的结构设计进行了理论分析和计算。
关键词:路面清扫车; 除尘装置; 扫盘;结构分析改进
Abstract:Road sweeper is dedicated road maintenance vehicles developed in recent years, mainly used for high grade roads, city roads and squares garbage. At present, with the rapid development of China's economy, the demand for healthy living environment, greatly promoted the development of road cleaning machinery field, and make it the driving force of sustainable development. In order to make our road sweeper level was improved in a short period of time, narrow roads andsome developed countries sweeper performance gap, to satisfy our country's sanitation department cleaning requirements on city streets, sweeping car manufacturing enterprise should increase research on road vehicle performance aspects. This paper introduces the current status of the domestic road sweeper, analyzes the basic structure of dust removal device, introduces the latest achievements in dust removal device structure and its improvement. The vehicle is divided into seven systems: chassis system, auxiliary engine system, pneumatic system, hydraulic system, disc brush assembly, the auxiliary frame assembly, carriage assembly structure. This design mainly sweeping type road sweeper sweeping disc, disc, a connecting seat the research object, the suction cup structure design of outlet, connecting seat through theoretical analysis and calcula tion.
Keywords::road sweeper dust collector structure analysis
前言
近些年来,随着我国的经济迅速发展,人民生活水平也得到很大的提高。人民对城市的卫生、道路清洁程度也越来越重视,人工清扫,工作效率低,工作量大这就会在很大程度上阻碍了城市道路环境卫生工作向更深的层次方向发展,因此道路清扫机得到了广泛的应用和发展。
本论文首先论述了道路清扫机的结构及工作原理,通过对国内外小型道路清扫机现状进行调查,研究和设计了一辆非常使用的道路清扫机。
1.清扫机概述
清扫机用于清除道路上的尘埃、落叶等一些比较轻小的垃圾。它适合作业地点,包括高等级公路、机场跑道、城市街道等,是清扫市政道路、街道和广场,收集和运输垃圾的专用路面清扫机械。道路清扫车多种多样,分类方式各不相同。其大概分类如下:
清扫车按其工作原理可以分为吸扫式扫路车、纯扫式扫路车和真空吸尘车三大类。
道路清扫车按照清扫作业时的除尘方式分为两种类型:湿式扫路车和干式扫路车。
道路清扫车根据体型的大小可以分为:小型,中型和大型三类。
2.清扫机整体结构布置
2.1整车方案
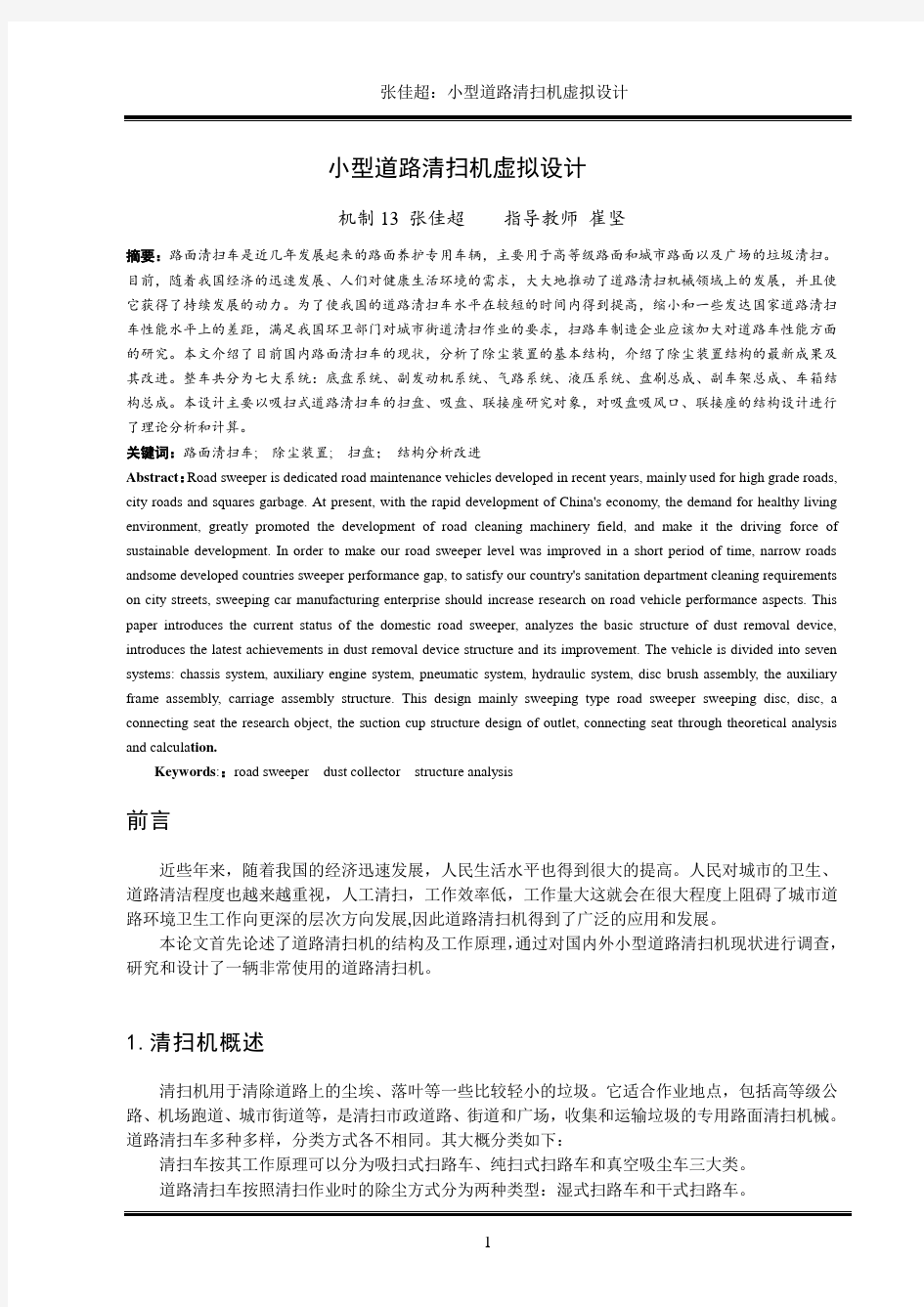
整车结构可以分为七大:前车架、后车架、联接座、操作室、吸扫装置、集尘装置、降尘装置。如图下图所示
2.2小型道路清扫车功能特点
本设计的小型清扫车标准底盘,车辆行走部分直接由底盘发动机的驱动;清扫车的行走机构的动力传动和清扫作业机构的动力传动互不影响,而是相互独立,其中工作装置的传动系统主要包括副发动机、风机及液压系统三大核心部分;清扫装置是在车底盘前后轮的中间适当位置安装两个盘刷,刷毛由合成塑料来制作。其弹性好,而且刚度适中,可以提高垃圾尘粒的抛射速度,同时也提高盘刷的工作能力。
3.清扫机盘刷结构及清扫机理
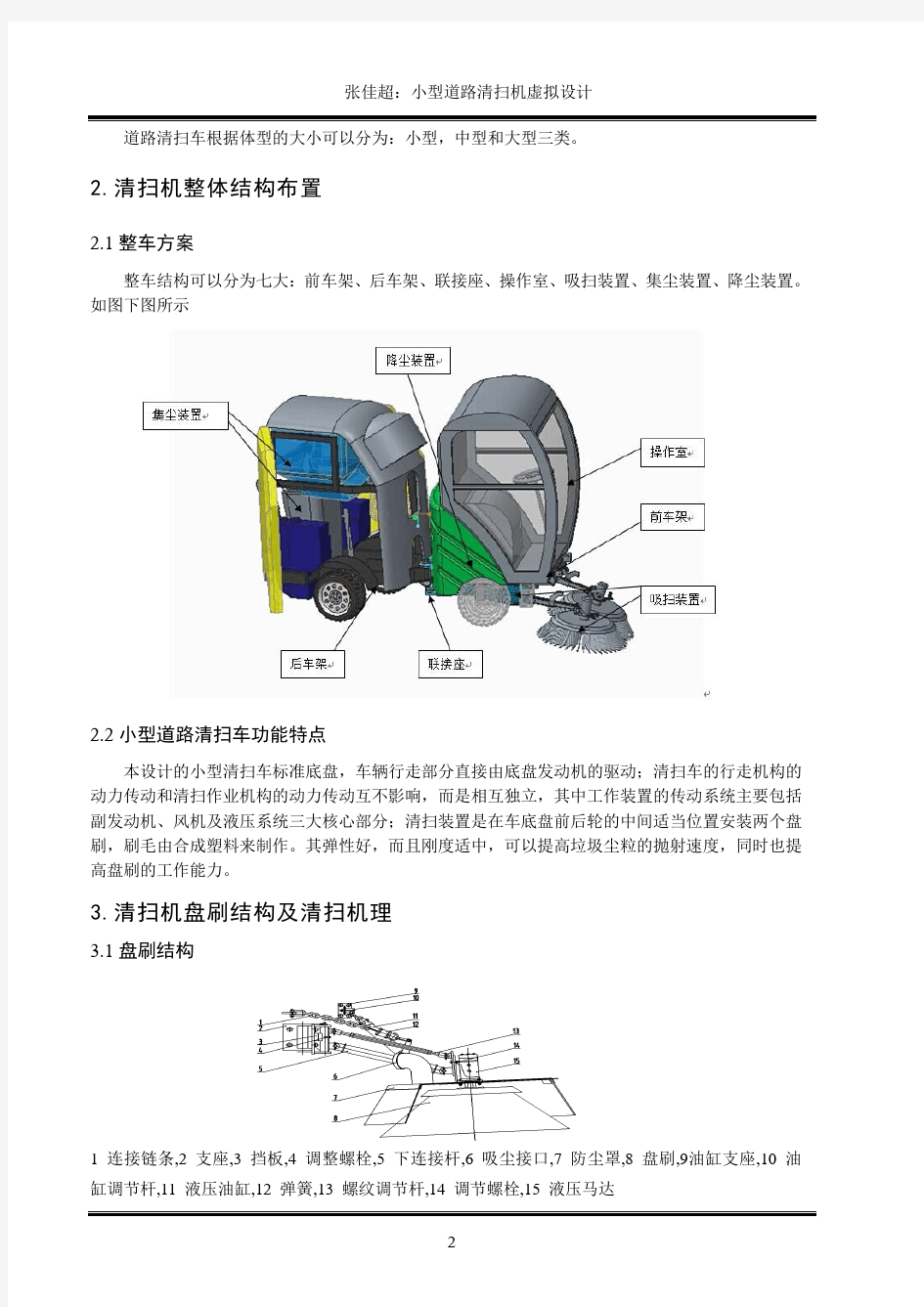
3.1盘刷结构
1 连接链条,
2 支座,
3 挡板,
4 调整螺栓,
5 下连接杆,
6 吸尘接口,
7 防尘罩,
8 盘刷,9油缸支座,10 油缸调节杆,11 液压油缸,12 弹簧,13 螺纹调节杆,14 调节螺栓,15 液压马达
3.2清扫机理
盘刷的转动是由液压马达的旋转来驱动的。清扫车行车作业,盘刷旋转过程中遇垃圾,使垃圾获得一定的速度,拋向吸嘴可吸区域形成垃圾带,在由吸嘴吸收,从而达到清扫的目的。在清扫过程中,需要保证盘刷有正确的拋尘方向,在保证合理的拋尘方向的同时,还要尽量使盘刷的清扫区间最大化,以达到最大的清扫宽度。
4.基于CREO2.0(M080)有限元分析及优化
4.1 联接座有限元分析
利用CREO2.0中的simulate模块进行分析前的相关设置,首先,我们先将装配图导入到simulate 模块中,具体步骤是:选择和分配零件的材料属性---施加机构载荷---施加约束---自动划分网格---定义并运行分析任务---进行静态和模态学分析---分析计算结果---进行优化设计。如图4-1选则材料进行添加
图4-1
进行有关的约束设如图4-2
图4-2 进行网格的自动划分如图4-3
图4-3
定义并运行分析如图4-4
图4-4 进行静态和模态分析如图4-5
图4-5
分析运算结果如图4-6(静态)
图4-6
4.2联接座优化设计
通过前期分析对联接做结构进行优化,改良脆弱部位,达到优化的目的。对相应结构进行改良后的分析比较。
静态分析图4-6中的我们发现变形量大的部位和脆弱部位,通过对联接座添加扣合板的方法,减少外部载荷对联接做做的破坏。如图4-7我们发现变形量和应力有了很大的改观,达到了我们优化的目的。
如图4-7
5.基于SolidWorks(Flow Simulation)CFD分析与优化
5.1概述
目前,国产公路清扫车的吸尘系统的设计大多仍然采用传统的做法,即设计人员首先进行吸盘与气路的结构设计,制造出物理样机进行测试,需要进行多次反复。吸尘系统的效率主要依赖于流场分布,而流场取决于吸盘、气路的结构。由于吸扫式吸尘系统的工作环境的复杂性,这种传统的设计方法往往难以达到期望的效果,这也是目前国产高速公路清扫车普遍存在清扫率低的缺点的原因。
自1990 年代中期以来,虚拟产品开发技术成为产品创新设计的支撑手段,作为近代流体力学、数值科学和计算机科学相结合的产物——计算流体力学(CFD)是分析产品流场的有效工具。本文基于CFD 技术对某一实际公路清扫车的吸尘系统进行仿真设计与优化,同步进行吸尘系统的结构设计和性能分析,减少了设计反复,缩短了设计周期,降低了设计成本,为开发我国高性能的高速公路清扫车做出了重要贡献。
5.1清扫车吸盘流场建模与优化分析
吸盘是吸尘系统的核心,吸盘的结构直接决定了其流场分布,从而决定了吸尘效率。图5-1和图5-2 为某实际清扫车吸盘最初设计的结构示意图,吸盘距离地面距离很小,由于吸盘周围有密封胶条,所以将吸盘理想化。在移动过程中由于风机的负压作用,将回吹气流吹起的地面上的垃圾吸入集尘箱内,该吸盘的尺寸是1.0m×0.5m×0.3m。
为进行CFD 分析,需要对吸盘进行网格划分。网格分为结构化网格和非结构化网格。结构化网格数量少,计算量少,适合规则物体网格划分。非结构化网格一方面可以不受求解域拓扑结构以及边界形状的牵制,同时还可以通过自适应网格,对速度梯度与压力梯度较大以及吸盘与地面接触部位进行网格细化,这样有利于增加计算结果的精确性,由于吸盘精度要求不高,我们也不需要很精细的划分网格,所以我们采用自动划分网格(结构划分网格)。
初始吸盘流场的CFD 分析,初始吸盘的物理模型和网格模型如上,计算过程中使用的边界条件为:
风机流量1.76 m^3/s, 回吹风口流量1.76 m^3/s, 与地面夹角0度,扩展区域边界的静压为0。计算过程中求解N-S 方程,采用k-?双方程湍流模型,离散方法采用有限体积法(FVM),目标设置为进风口的平均速度。由于回吹风的存在,垃圾会被吹出吸盘造成二次污染是一个很重要的问题。
经过计算,我们得出如图5-3为原始模型吸盘流体速度和静压力图,图5-4为优化模型后的速度和静压力图,完整报告表为附录1。经过对比后我们可以知道,优化后的模型进风口的速度(20.458m/s)要比以前的模型进口风速(15.98m/s)大,涡流处的风速也有所增加,所以更利于灰尘的卷起和吸取,对比静压数据后可以知道,优化模型的进风口处压力(100583.41Pa)比优化前压力(101896 Pa)小,所以优化后更有利于吸尘。
图5-3
图5-4
本章节,讨论了CFD 在高速公路清扫车吸盘结构设计中的应用。根据上吸盘外形参数进行建模分析,得出以下结论:
1) 通过利用CFD 数值仿真技术进行分析和改进设计后的新吸盘整体性能大大优于初始设计,达到了设计要求;
2) CFD 数值仿真技术是对清扫车数字样机吸盘进行性能分析的有效手段;
3) 通过CFD 仿真进行设计方案评估,可避免设计反复,加快产品研发速度,缩短产品研发周期;
4) 用CFD 对流场进行仿真,必须结合具体工程的特点,选择适当模型和求解方法,把已有经验、物理试验、仿真试验三者结合起来综合考虑。
6.总结
本文主要以吸扫式道路清扫车的扫盘、吸盘、联接座研究对象,对吸盘吸风口、联接座的结构设计进行了理论分析和计算。得出以下结论:
1)根据小型吸扫式道路清扫车的功用,确定了其主要一些参数,并通过其结构特点和工作方式进行分析,对主要工作装置进行了相关的设计计算。
2)根据联接座的分析,我们进行了优化,改善了联接座的承载情况。
3)在对吸盘的空气动力学分析中,我们由气流矢量图,看到吸风口的速度一定的情况下,由于吸风口和回风口同时连接到吸盘,进风口的速度不会太快,所以该小型道路清扫机只能清扫灰尘是、树叶等质量和体积比较小的垃圾,所以本车存在局限,如果改变车的气流的回流方式即改变吸盘与回风口的联接方式,从而提高进风口速度,相应的适应性就会越高。
参考文献
[1]谢立扬。国外路面清扫车概况。筑路机械与施工机械化
[2]徐宁,吴三达。国内吸扫式扫路车技术发展综述。专用汽车
[3]张新荣。清扫车总体布置探讨。筑路机械与施工机械化,1995
[4]张铁山,凌和平。中型道路清扫车的总体设计与研究。专用汽车,2010
[5]宋永刚等。高等级公路清扫车盘刷性能与技术研究。西安公路学院学报,1995,2010
[6]、、王健。纯扫式扫路车滚刷装置设计与计算。工程机械,2011
[7]袁正前。浅析吸扫式扫路车清扫效率的主要影响因素。江苏交通科技,2003[8]孙桓,陈作模,葛文杰主编,机械原理,高等教育出版社;黄平,朱文坚主编,机械设计,清华大学出版社
[9]盛金良。清扫机立刷摆动轴倾角的设计。工程机械,1993
[10]庞晓琛。马路清扫车总体及关键部件设计研究。东南大学,2008
[11]耿兴平,何黎娟。扫路车扫刷触地压力自控装置的研究。专用汽车,2009
[12]潘公宇。清扫车清扫装置的性能研究。筑路机械与施工机械化,1997
[13]宋永刚等。高等级公路清扫车盘刷性能与技术研究。西安公路学院学报,1995
[14]张巍。清扫车清扫机构的控制研究。重庆大学,2001
[15]袁丹红。扫路车吸嘴结构的改进[J].专用装置,2005
[16]高晖。颗粒悬浮体多相流及其相分流现象。西安交通大学博士学位论文,2003.4
[17]李战军,郑炳旭。尘粒起动机理的初步研究
[18]周光炯,严宗毅,等编。流体力学(上下册)
[19]许礼鸿。吸扫式路面清扫车使用效能影响因素分析。公路与汽运,2005
[20]孙洪亮。清扫吸尘口装置的研究。鞍山钢铁学院硕士学位论文,2000.3
[21]王蓉。高速公路清扫车作业装置的研究。专用汽车,1995
[22]张晨光。清扫车工作装置的匹配性能研究。长安大学机械电子工程,2010
[23]陈忠基,吴晓元,徐广谱,等,路面清扫车吸嘴装置的实验研究。同济大学学报,2001
[24]张毅。JAS2008B型道路清扫车的设计。环境卫生工程,2009
[25]顾柏良等译。汽车工程手册。北京理工大学出版社
[26]华绍曾,杨学宁,等编译,实用流体阻力手册。
[27]曾广银,李欣峰,肖田元,徐云。公路清扫车吸尘系统仿真设计期刊,2004
自动制钉机设计说明书
自动制钉机设计说明书 自动制钉机设计说明书 学院: 工程学院专业: 机械设计制造及其自动化班级: 10级8班姓名: 谢文华学号: 1015013108 同组成员: 指导老师: 魏春梅 1 目录 一. 课程设计任务书及工作要求…………………………………3 二. 机构工作原理…………………………………………………3 三. 功能分解图,执行机构动作分解图…………………………5 四. 工作循环图……………………………………………………10 五. 运动方案的选择与比较………………………………………11 六. 机构运动简图…………………………………………………15 七. 执行机构设计过
程...................................................16 八. 设计总结与心得......................................................19 九. 主要参考资料及其编号 (21) 2 一( 课程设计任务书及工作要求 1、工作要求 ,1.6,3.4mm,; (1)铁钉直径为 mm(2)铁钉长度为25,80; (3)生产率为60枚/min; (4)最大冷镦力为3000N,最大剪断力为2500N; (5)冷镦滑块质量为8kg,其它构件质量和转动惯量不计; (6)要求结构简单紧凑、传动性能优良、噪声尽量减少。 2、设计任务 (1)按工艺动作要求拟定运动循环图。 (2)进行送丝校直机构、冷镦钉帽机构、冷挤钉尖机构、剪断钢丝机构的选型。 (3)机械运动方案的评价和选择。 (4)拟定机械传动方案。 (5)设计飞轮和确定电动机型号。 (6)画出机械运动方案简图。 (7)对传动机构和执行机构进行运动学尺寸计算。二(机构工作原理 , 制造木工用大大小小的铁钉是将一卷直径与铁钉直径 相等的低碳钢丝通过下列工艺动作来完成的。 3 1)校直钢丝。并按节拍要求间歇地输送到装夹工位。 2)冷镦钉帽,在此前夹紧钢丝。
单件物品卸料机构
一、课程设计任务书 1.1课程设计的目的及意义 自动机械设计这门课程是机械专业的一门主要专业课程,学习完这门课程之后同学们在脑中应该对机械系统设计有一个总体的框架。为了加深对这门课程的更深入的理解及运用,培养学生对理论知识的综合应用能力和实践动手能力,安排课程设计这一教学实践环节。 通过课程设计进一步培养学生的设计能力、理论联系实际的能力,同时巩固复习前面学过的理论知识,为后续的毕业设计打下一定的理论基础。 1.2题目:单件物品卸料机构 卸料机构的目的是:对旋转式四工位粉末压力成型机加工的产品实现自动卸料的功能。为此需要了解粉末压力成型机的工艺原理:该压力成型机用于实现对粉末材料进行压力加工而达到成型的目的,并能实现自动出料以便完成后续工作。为提高效率采用回转工作台,它具有运动和停歇两个工作阶段。在停歇阶段,各个工位完成各自的加工动作;在回转阶段,工作台运转到下一个工位。 1.3 设计任务 1.3.1设计参数: (1)卸料次数 120件/分钟 (2)压力成型机生产率 120件/分钟 (3)转盘台面高度 800mm (4)产品的尺寸 L×B×H=200×100×30mm (5)粉末材料密度 p=7.5×103Kg/m3 1.3.2机构的功能: 配合旋转式工作台,能自动将压力成型机加工的产品输送到指定的工位。 1.3.3设计要求及设计内容 (1)设计要求 1) 课程设计是一必修的实践性教学环节,所有学生必须重视,认真对待,必须独立按时完成课程设计任务,遵守设计纪律,严禁雷同,抄袭。 2) 要求所设计的机构性能良好,结构紧凑,便于制造,使用维护方便。考虑自动化生产,要求能自动卸料,且满足产品变化的要求,能方便的组成生产线。
小型马路清扫机的设计
小型马路清扫机的设计 一:摘要 (1) 二:前言 (2) (1)马路清扫机设计的背景及意义 (1) (2)马路清扫机发展的前景和现状 (2) 三:操作系统的确定及计算 (3) (1)转动方案的确定………………………………………………………………………………. (2)设计各种转动比和主要参数…………………………………………………………………. 3.2.1转动比的确定…………………………………………………………………………… 3.2.2各轴转速的确定.......................................................................................3.2.3各轴转速的计算...................................................................................... 四:轴的设计计算及校核 (4) 4.1.1第一级轴的设计计算及校核………………………………………………………….. 4.1.2第二级轴的设计计算与校核…………………………………………………………… 4.2轴承的设计计算与校核……………………………………………………………………. 4.2.1第一级轴的设承计计算与校核……………………………………………………………4.2.2第二级轴的设承计计算与校核………………………………………………………………. 4.2.3第三级轴的设承计计算与校核....................................................................... 五:结论 (5) 5.1主要优点……………………………………………………………………. 5.2主要缺点……………………………………………………………………. 5.3有待改进的地方…………………………………………………………… 5.4维护和保养………………………………………………………………….. 六:设计心得 (6) 参考文献 感谢 摘要 近年来清扫机层出不穷,较为常见的是汽车清扫机,汽车清扫机的出现大大减少了人工。但汽车清扫机只能在主干道和平坦的公路进行清扫,且汽车清扫机结构复杂、成本高,使用数量较少,环卫工人的工作强度并未减少。电动清扫机逐渐发展起来,但是清扫机的蓄电池较重、电压变化等以道只能人工清扫。以往道路清洁用的大型清扫车有4米宽、7米多长,只能夜间在主路作业,而路面狭窄的街道只能人工清扫。今天首次上路的26台小型清扫车则体积小巧、活动灵活,连人行道也能清扫。生活垃圾越来越多,为了我们能有一个舒服的生活环境,小型清扫机的发展是必要的。 前言 一、马路清扫机设计的背景及意义。 随着科学技术的日益发展,人们更多的是得到人性化的生活方式。马路清扫机的设计不仅可以减少环卫工人的劳动更能更快更好的改善人的环境,使人们过上干 净舒心的生活。所以小型马路清扫机的发展是必要的。据介绍,一台小型清扫 车每个工作日可清扫道路5千平方米,相当于6个清洁工的日劳动量,不 仅大大减轻了环卫工人的劳动强度、降低了作业成本,还增强了道路巡回
道路清扫保洁项目应急方案及项目管理
道路清扫保洁项目应急方案及项目管理 一、项目的整体设想与构成 1.项目概况 由阜阳市经济技术开发区招标的阜阳市淮河路等11条道路清扫保洁项目总范围是七里长沟路(沙河路—铁路桥)全长1300米,颍上南路(林带路—南二环路)全长500米,沙河路(七里长沟路—淮河路)全长2400米,南二环路(二环东清河桥—南二环转盘)全长1340米,南三环路(淮河路东清河桥—铁路桥)全长1950米,阜颍路(南三角—铁路桥)全长1100米,老阜颍路(颍上南路—南二环路)全长1000米,三清路(淮河路钢材市场南—东清河桥)全长2800米,颍南路(南三角—东清河桥)全长1200米,颍州南路(贯清路—三清路)全长900米,阜王南路(武警支队—三清路)全长600米,服务总面积约974200平方米,共计11条道路及三座公厕清扫、保洁、垃圾清运及所有道路交通护栏、围墙、公交站台、垃圾收集房、收集箱等附属设施保洁服务。 2、整体设想 l、认真贯彻执行《中华人民共和国合同法》、《中华人民共和国招投标法》、《中华人民共和国城市市容和环境卫生管理条例》、《城市容
貌标准》、《城市生活垃圾管理办法》、《城市道路和公共场所清扫保洁管理办法》等国家、省、市现行有关法律法规。按照招标文件及项目服务合同要求严格执行《环卫作业质量标准及检查考评办法》等国家、行业技术标准、规范及规程,切实履行服务合同,认真落实“全面控制、细节管理、现场督导、文明服务、一丝不苟”的环卫工作方针。积极加强与环卫各职能部门及街道有关单位的日常工作沟通;无条件地接受市环卫部门的监督检查和业务指导。认真完成上级交办的临时性、实质性工作任务,对环卫处提出的意见及时采纳并积极落实相应整改措施;对作业服务范围内发生的违反城市环境卫生管理法律法规的人和事,采取积极劝阻、制止等措施,并及时向环卫部门报告。 2、一个地方的环境卫生状况集中体现一个地方的文化内涵及文明程度,也充分彰显出全市人民的文化素质修养,更能明显反映出社会经济发展水平和人民的健康生活水平。为此强化和提高城市环境卫生工作是城市环卫人员所肩负的一项光荣、神圣的社会使命。我公司项目部对本项目的环卫作业服务,充满信心、决心。请各级主管部门、领导放心,我们将会严格按照环卫作业服务质量标准和检查评定要求,认真做好、经营好、管理好、实施好、服务好环卫作业工作中的每个细节。 3、建立一套符合实情、有序、有效的环卫作业工作管理体系、制定切实可行的环卫作业工作流程,把细节管理、过程管理、绩效管理有机结合起来,从而确保片区环卫作业工作得以不断提升。同时还将开展经常性的职业素质教育培训,努力打造和培养一支优秀的专业环卫团队。在建立健全严格的工作考评考核机制的同时,运用激励机制不断提升环卫作业的服务质量水平;努力营造项目部文化氛围,积极
加工车间自动清扫机设计
青岛农业大学 毕业论文(设计) 题目:机械加工车间清扫机设计 姓名:刘翠 学院:机电工程学院 专业:机械设计制造及其自动化 班级: 2010.04 学号: 20102469 指导教师:徐永健 2014 年 6 月16 日
青岛农业大学机电工程学院本科毕业设计(论文) 毕业论文(设计)诚信声明 本人声明:所呈交的毕业论文(设计)是在导师指导下进行的研究工作及取得的研究成果,论文中引用他人的文献、数据、图表、资料均已作明确标注,论文中的结论和成果为本人独立完成,真实可靠,不包含他人成果及已获得青岛农业大学或其他教育机构的学位或证书使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。 论文(设计)作者签名:日期:年月日 毕业论文(设计)版权使用授权书 本毕业论文(设计)作者同意学校保留并向国家有关部门或机构送交论文(设计)的复印件和电子版,允许论文(设计)被查阅和借阅。本人授权青岛农业大学可以将本毕业论文(设计)全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本毕业论文(设计)。本人离校后发表或使用该毕业论文(设计)或与该论文(设计)直接相关的学术论文或成果时,单位署名为青岛农业大学。 论文(设计)作者签名:日期:年月日指导教师签名:日期:年月日
目录 摘要.............................................................................................................................................. Abstract ........................................................................................................................................... I I 1 选题背景 (1) 2 方案论证 (3) 2.1 设计要求 (3) 2.2 总体方案确定 (3) 3 过程论述 (7) 3.1 铁屑收集装置设计 (7) 3.2 动力装置设计 (8) 3.3 吸尘装置设计 (16) 3.5 底盘的设计 (21) 4 总结 (22) 参考文献 (23) 致谢 (24)
毕业设计说明书城市道路清扫车的设计
本科学生毕业设计 城市道路清扫车的设计 系部名称:汽车工程系 专业班级:车辆工程B05-17班学生姓名:王刘保 指导教师:苏清源 职称:副教授 黑龙江工程学院
二○○九年六月 The Graduation Thesis for Bachelor's Degree Design of the city road sweeper Candidate:Wang Liubao Specialty:Vehicle engineering Class:B05-17 Supervisor:Associate Prof. Su Qingyuan Heilongjiang Institute of Technology
2009-06·Harbin
黑龙江工程学院本科生毕业设计 摘要 我国道路清扫车行业历经数十年的发展,产品从单一的纯扫式发展到目前的多种型式,产品性能和产品质量迅速提高,特别是在改革开放以后,通过进口关键外购件使扫路车产品性能和可靠性大大提高。但目前我国扫路车的水平与国外发达国家相比,还存在一定的差距,特别是在产品的可靠性方面。 文中介绍了道路清扫车的改装设计说明。叙述了在改装道路清扫车过程中容易出现的问题。对清扫系统进行了详细的设计,叙述了相关专用设备的工作原理,并进行了比较分析。对扫盘、吸嘴、集尘箱、风机等设备的选择进行了仔细的对比分析。保证道路清扫作业的安全性。 关键词:道路清扫车;扫刷;扫盘;吸嘴;集尘箱;专用车 I
黑龙江工程学院本科生毕业设计 ABSTRACT Our country path sweeps clear the vehicle profession to have been through repeatedly the dozens of years the development, the product from sole sweeps the type to develop present many kinds of patterns purely, the product performance and the product quality rapid enhancement, specially after reform and open policy, causes the sweeping machine product performance and the reliability through the import key outsourcing enhances greatly.But the present our country sweeping machine level and the overseas developed country compare, but also has certain disparity, specially in product reliable aspect. In the article introduced the path sweeps clear the vehicle the re-equipping design explanation.Narrated in re-equipped the path to sweep clear the question which in the vehicle process easy to appear.To swept clear the system good detailed design, narrated the correlation special purpose equipment principle of work, and has carried on the comparative analysis.To swept the plate, attracts mouth, collection dust box, air blower equipment and so on choice has carried on the careful contrast analysis.Guaranteed the path sweeps clear the work the security. Key words: the path sweeps clear the vehicle;the scanning;sweeps the plate;attracts the mouth;the collection dust box;the private car II
自动制钉机的原理方案设计53
1 引言 1.1 制钉机 制钉机是用来制造铁钉的生产设备。 制钉机又名废旧钢筋制钉机,它本着一切从废物利用节能高效,变废为宝的角度出发,一切从用户能够快速致富的角度出发,以经济实用性为主,达到了技术含量高,操作使用方便,它动力小,节约能源,性能稳定可靠。质量达到标准,该设备具有体积小,灵活移动方便,低噪声、低耗电、易安装等特点。故此该项目已成为各企业、个体、家庭、下岗职工、农民朋友快速致富投资的理想项目。 1.1.1 国外制钉机的发展现状 1970年到1979年,国际制钉机业飞速发展.尤其是美国、德国、日本、韩国和我国台湾省等国家和地区,利用雄厚的资金和技术不断推陈出新。近年来工业发达国家在集团优势差。我国,技术含量越高的制钉机产品质量越差,而质量差的产品,很难参与国际制钉机发展上速度不快,甚至有所下降。而发展中国家的制钉机产量则大幅度上伸升。 1.1.2 我国制钉机的发展现状 国内制钉机产品的生产工艺落后,产品质量挡次较低。中国的全自动制钉机制造业经过多年的发展,从无到有,从弱小到强大。但总的来说,规模小的企业偏多,营业收入低,竞争,更谈不上形成品牌。据了解,美国,西欧和日本一年共消耗制钉机近20万。而作为手工产品著称的我国大陆,出口欧、美、日本市场的制钉机只占其消耗量的l%~1.5 %,显然是很不相称的。制钉机业较发达的韩国和台湾在几年前已达到年出口10万台以上。与我国处在同等水平的巴基斯坦和泰国制钉机出口也超过我国。1.2 ADAMS软件 ADAMS,即机械系统动力学自动分析,该软件是美国MDI公司开发的虚拟样机分析软件。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用
垃圾清运管理制度
垃圾清运管理制度 铁山街道办事处垃圾处理长效管理实施方案 为进一步完善我处“户集、村收、处处理”的农村垃圾处理运行机 制,加强全处环境卫生长效管理,有效改善村处环境卫生状况,创建环境优美、干净整洁、舒适宜居的处、村环境,根据中共胶南市委办公室、胶南市人民政府办公室《关于印发〈2011年城乡环境综合整治工作考核办法〉的通知》(南办发【2011】3号)文件要求,经办事处政府研究,制订如下方案: 一、指导思想 以科学发展观为指导,围绕社会主义新农村建设和城乡一体化建 设目标,按照”户集、村收、处处理”的农村垃圾处理模式,本着布局合理、运转有效、资源充分利用的原则,由处、村、户三级负责,分级管理,加强农村垃圾收集处理工作,完善基础设施,建立环卫队伍,加大资金投入,落实运营经费,严格考核奖惩,逐步建立收集、运输、处理、管理、监督于一体的农村垃圾处理管理机制,推进农村环境整治工作的制度化、规范化、科学化、常态化。 二、主要任务 (一)责任分工 按照属地管理和“谁产生、谁负责”的原则,划分垃圾收集和保洁 工作责任范围。 1、村庄内垃圾收集和保洁工作由各村负责督促管理。国道、省 道、市道、处主次干道以及田间生产道路两侧的垃圾收集和保洁工作按照属地管理的原则由所在村负责。 2、村集体、企业、群众等产生的建筑垃圾由建筑垃圾制造者直 接送到处垃圾处理场,所在村负责督促管理。
3、办事处垃圾收集和保洁工作由办事处负责督促管理;处直各单位的垃圾处理由办事处负责督促管理;全处范围内的企业垃圾处理由处经济办负责督促管理;中小学校垃圾处理由处中心校负责督促管理,各学校负责收集并清运到临近的垃圾中转站或简易垃圾填埋点。 4、医疗卫生和计划生育机构产生的污染垃圾由该机构进行消污处理后,送到临近的垃圾中转站或简易垃圾填埋点。 5、未进入垃圾中转站或简易垃圾填埋点的大堆生活垃圾和大堆建筑垃圾由所在村或单位负责清运到处垃圾处理场或简易垃圾填埋点。 办事处共设立中转铁皮箱35处。 (二)运行机制 按照处、村、户三级联动,分级负责的要求,实行户集、村收、处处理的模式进行处理。 1、户集。各村要给各家各户统一配置垃圾桶或各户自备垃圾桶,群众负责自家房前屋后的卫生清扫,每天将垃圾按时送到指定地点。 2、村收。由各村根据自身实际,合理规划建设垃圾中转站或简易垃圾填埋点,配置清运车。各村要根据实际情况,确定环卫工人人数。环卫工人负责收集群众 垃圾桶内的垃圾,并做好村内外道路、公共场所的卫生保洁,要做到日产日清,按时将垃圾清运至垃圾中转站或简易垃圾填埋点。 3、办事处处理。办事处进一步规范处级环卫公司,安排专项资金,建设大型垃圾处理场。环卫公司负责将各村垃圾中转站的垃圾统一清运至处垃圾处理场进行无害化处理。 (三)落实经费保障 按照“谁产生、谁付费”原则,向处区范围内的企事业单位、商户
智能控制系统的扫地设计
本科毕业设计说明书 扫地机的智能控制系统设计 SWEEPER INTELLIGENT CONTROLSYSTEM DESIGN 学院(部): 专业班级: 学生姓名: 指导教师: 年月日
扫地机的智能控制系统设计 摘要 目前,各式各样的服务机器人越来越多应用于人们的生活中,从事着与人们生活息息相关的服务工作,极大地提高和改善了人们的生活质量。室内智能扫地机器人就是在这种背景下诞生的一种家庭服务机器人。室内智能扫地机器人的路径规划采用区域充满的规划方法,目标是在设定区域内寻找一条从始点到终点且经过所有可达点的连续路径。根据建立的扫地机器人平台,提出清扫机器人随机运动路径规划算法。机器人利用其上安装的红外传感器和摄像头来识别和感知房间环境,机器人开始以螺旋运动方式覆盖房间的空白区域,当遇到障碍物时,启动障碍物应对策略,通过计算机软件仿真和在房间环境中进行实验验证了该算法的有效性。 关键词:扫地机器人,单片机,环境识别,路径规划
SWEEPER INTELLIGENT CONTROLSYSTEM DESIGN ABSTRACT At present time,more and more various of service robots are designed and applied to people’s daily life.The application of these robots is promoting the quality of people’s life tremendously as they deal with the works related to people’s life closely.Indoor automatic cleaning robot is one of these service robots developed to help people to carry out the troublesome room cleaning work.The path planning algorithm of Indoor Automatic Cleaning Robot should spread over the room area using the area filling path planning algorithm to find a continuous path from start to end. A random moving path planning algorithm is put forward based on the platform. The cleaning robot identifies the room environment using the infrared transducer and the camera outfitted on its body.Moving in the spiral motion mode with the gradually enlarging radius,the robot begins to explore and clean the blank area.While it encounters obstacles like wall or furniture,it will start the strategy of dealing with obstacles.This algorithm is validated through computer simulation and robot experiment. KEYWORDS:cleaning robot,single chip microcomputer,environment identification,path planning
城市道路清扫车的毕业设计
优秀毕业设计作品 摘要 我国道路清扫车行业历经数十年的发展,产品从单一的纯扫式发展到目前的多种型式,产品性能和产品质量迅速提高,特别是在改革开放以后,通过进口关键外购件使扫路车产品性能和可靠性大大提高。但目前我国扫路车的水平与国外发达国家相比,还存在一定的差距,特别是在产品的可靠性方面。 文中介绍了道路清扫车的改装设计说明。叙述了在改装道路清扫车过程中容易出现的问题。对清扫系统进行了详细的设计,叙述了相关专用设备的工作原理,并进行了比较分析。对扫盘、吸嘴、集尘箱、风机等设备的选择进行了仔细的对比分析。保证道路清扫作业的安全性。 关键词:道路清扫车;扫刷;扫盘;吸嘴;集尘箱;专用车 I
优秀毕业设计作品 ABSTRACT Our country path sweeps clear the vehicle profession to have been through repeatedly the dozens of years the development, the product from sole sweeps the type to develop present many kinds of patterns purely, the product performance and the product quality rapid enhancement, specially after reform and open policy, causes the sweeping machine product performance and the reliability through the import key outsourcing enhances greatly.But the present our country sweeping machine level and the overseas developed country compare, but also has certain disparity, specially in product reliable aspect. In the article introduced the path sweeps clear the vehicle the re-equipping design explanation.Narrated in re-equipped the path to sweep clear the question which in the vehicle process easy to appear.To swept clear the system good detailed design, narrated the correlation special purpose equipment principle of work, and has carried on the comparative analysis.To swept the plate, attracts mouth, collection dust box, air blower equipment and so on choice has carried on the careful contrast analysis.Guaranteed the path sweeps clear the work the security. Key words: the path sweeps clear the vehicle;the scanning;sweeps the plate;attracts the mouth;the collection dust box;the private car II
自动制钉机机械原理课程设计
机械原理课程设计 题目名称自动制钉机 专业班级 15机制(专升本) 学生姓名刘备 学号 指导教师诸葛亮 机械与电子工程系 二○一六年六月十六日
目录 一、机械原理课程设计任务书 (3) 二、设计内容 (4) 1.根据工艺动作要求拟定运动示意图 (4) 2.各机构的选型设计 (5) 2.1选型设计 (5) 2.2自动制钉机的功能分解 (6) 2.3系统运动转换功能图 (9) 3.方案的比较 (9) 4.执行机构设计过程 (12) 4.1.连杆机构 (13) 4.2夹紧凸轮 (13) 4.3冷挤(切断)凸轮 (13) 4.4齿轮的选择 (14) 4.5槽轮半径的选择 (14) 4.6电动机的选择 (14) 5.运动方案选择 (15) 6.运动循环图 (16) 总结 (17) 参考文献 (18)
一、机械原理课程设计任务书 专业 15机制(升本)学号 XXXXXXXXXX 姓名刘备 设计题目:自动制钉机的设计 一、设计题目 制造木工用大大小小的铁钉是将一卷直径与铁钉直径相等的低碳钢丝通过下列工艺动作来完成的。 1)校直钢丝。并按节拍要求间歇地输送到装夹工位。 2)冷镦钉帽,在此前夹紧钢丝。 3)冷挤钉尖。 4)剪断钢丝。 二、原始数据及设计要求: 1)铁钉直径Φ1.6—Φ3.4mm。 2)铁钉长度25—80mm。 3)生产率360枚/min。 4)最大冷镦力3000N,最大剪断力2500N。 5)冷镦滑块质量8kg,其他构件质量和转动惯量不计。 6)要求结构紧凑,传动性能优良,噪声尽量减小 三、设计任务 1)按工艺动作要求拟定运动循环图。 2)进行送丝校直机构、冷镦钉帽机构、冷挤钉尖机构、剪断钢丝机构的选型。 3)机械运动方案的评价和选择。 4)按选定的电动机和执行机构的运动参数拟定机械传动方案。 5)设计飞轮和确定电动机型号。 6)画出机械运动方案简图。 7)按蚌埠学院相关格式要求编写设计说明书
液压集成块说明书
液压集成回路课程设计 院(系): 专业班级: 姓名: 学号: 指导老师: 时间:
目录一.设计题目 二.前言 1.液压系统及液压站简介 2.蓄能器加速回路 3.液压集成块 三.课程设计任务要求 1.目的和意义: 2.基本要求: 四.课程设计的容 1.容 2.工作量 3.设计时间安排 五.液压集成块的设计 1.集成块装置的设计: 2.应用元件: 3.摆放位置
一.设计题目: 同步回路 YJ25 二孔液压集成块设计 尺寸要求:130×120×92 二.前言: 1.液压系统及液压站简介 液压系统已经在各个工业部门及农林牧渔等许多部门得到愈来愈广泛的应用,而且愈先进的设备,其应用液压系统的本分就愈多。 在造纸、防治、塑料、橡胶等轻工行业,造纸机、纺织机、注塑机、橡胶压块机等机械设备上都有大量使用着液压系统。在矿山、石油、冶金、压力加工等重工业中,由于液压系统能传递很大的能量而设备的重量相对其他传动方式来说又较小,所以更有广泛的应用。例如矿井支架、石油钻井平台、高炉炉顶设备、钢坯连铸机、板带轧机压下系统、压力机、快锻机等设备上液压系统被广泛地使用者。其他在电力、建筑、水利、交通、船舶、航空、汽车等行业,液压系统也是重要的组成本分,至于航天、军工等广泛采用先进技术的部门,液压系统更是得到广泛应用。机床行业是最早使用液压技术的行业之一,目前虽然由于电动机交流变频技术的发展而是电动机驱动夺回不少液压驱动的围,但在大功率驱动或往复运动的场合,液压系统还是被广泛应用。 液压站是由液压油箱,液压泵装置及液压控制装置三大部分组成。液压油箱装有空气滤清器,滤油器,页面指示器和清洗孔等。液压泵装置包括不同类型的液压泵、驱动电机及其他们至之间的联轴器等。呀呀控制装置是指组成液压系统的各阀类元件及其连接体。
小型走廊清扫机设计
第1章前言 1.1清扫工具的现状和发展前景 从20世纪60 年代我国研制生产路面清扫机械开始(指大型清扫机的研制),已有40 多年的生产历史,然而中小型清扫机的研制开发则刚刚起步。相对于发达国家,我国地面清扫机在销售规模、技术水平、清扫效果等方面都存在一定的差距。随着公共环境卫生、工厂清洁机械市场的迅猛发展,2005 年之后,国内地面清扫机开始呈现快速发展的态势。但与国外相比,国内还停留在市场的初级发展阶段。 我国已逐步进入现代化社会,陈旧、落后的清扫方式及设备,已不能满足社会进步的需要。对于自动化扫地器具,人们常见的是马路上的扫地车,它能进行大面积街道清扫、工作效率高,并且节约人力。然而,小面积区域的清扫工具还主要沿用传统手工扫地工具:扫帚,工作效率低、清扫效果不够理想、浪费人力资源。而工作效率高的省时省力的庞然大物扫地车在比如厂区、居住小区、机关、学校、医院、小街小巷、走廊等场所,确是英雄无用武之地。随着现代生活节奏的加快及居住面积的增大,家居地面的清扫工作也越来越繁重,严重干扰了人们的生活。因此急需开发一种成本低、节约人力物力、清扫效果良好的适应院落、小区、小巷、走廊等小区域场所的小型清扫设备。 目前,许多国家研制的清洁机器人应时而生。日本,美国,欧洲各大厂商竞相开发,有些产品甚至很超前。例如,有一种具有高效吸尘除灰功能的清洁机器人,可遥控也可自主运作,能转向,躲避障碍物,有很高的实用价值,可对家居、厂矿企业等地面进行清洁,帮助人们从繁杂的劳动中解放出来。在国外清洁设备的拥有率和洗衣机几乎相当,甚至要高(有公用洗衣房,专业洗衣店的缘故)。在这方面,国内的研发步伐较慢,但是随着国家城市化的进程不断加大和经济的发展,许多新兴的中小城市正在崛起,城市化规模不断扩大,现代化的工厂不断建成,机关、小区、医院、学校和公共场不断建设机械化清扫已经成为一种必然,地面的清洁养护及工厂清洁生产已经越来越重要。劳动力成本的不断提高,清扫设备的市场前景日渐看好。 由于人们对环境污染问题越来越重视,燃油车在很大程度上受到限制。政府大力提倡绿色能源设备。近日国家出台燃油含税的政策,给电动扫地车带来福音。小型清扫设备因其实用性强、垃圾清扫率高、污染小、成本底、结构紧凑、操作简单、维修方便等特点具有广泛的市场前景和实用价值,它的出现和使用,将极大减轻人们繁琐的家务劳动,节省宝贵的时间,提高了人们的生活质量。小型清扫设备现在正是一个高速发展的时期,有着极其广阔的发展空。
道路清扫保洁服务方案
道路清扫保洁服务方案 一、进场工作 进场后,对道路的标识牌等公共设施进行全范围的清扫工作,并且安排人员对道路每天巡查,发现问题及时处理问题,遇到可以破坏公共的设施的群众进行劝阻工作,若遇到情形恶劣的,及时向上级反应进行处理。 二、范围 承包作业范围为()主干道范围内的道路、内街内巷、公共场所、旧村、非机动车道、人行道、绿化带和各住宅小区街巷等,其中县道部分不含机动车道。环卫清扫保洁总面积为()平方米。 三、本项目总体设想 本项目采取质量管理责任化,作业标准精细化,设备机械专业化,教育培训系统化的“四化”模式。 1.质量管理责任化 根据招标文件的要求,结合本项目道路保洁的实际情况,实行项目经理质量问责制。选派菊友丰富日常管理经验的管理人员组成本项目管理班子,配齐所有的职能人员。 2. 作业标准精细化 以合肥市市政和园林绿化管理办公室相关考核标准,《合肥市公园环境卫生保洁督查考核规范》及《合肥市公园环境卫生保洁项目考核评分细则》的内容,制定本项目的保洁作业标准。 3. 设备机械专业化 根据本项目道路保洁的实际情况和招标文件保洁的要求,配齐洒水车,扫地机,油污冲洗设备,渣土应急保障设备,清雪设备,快速保洁车及各类工具,物资等,能良好的提高保洁服务质量。 4. 教育培训系统化 利用公司已经取得IS09001质量管理体系,IS014001环境管理体系,OHSAS18001职业健康管理体系认证的管理优势及管理经验,定期与不定期的联
合环卫,街道及城市执法等相关部门,对员工进行专题讲座培训,提高本项目道路清扫保洁的整体质量水平 四、项目创新 突破传统的运行模式,进行保洁管理、作业措施和使用设施、设备的创新。近年来,随着城市建设的不断推进,与其相配套的环卫事业发展步伐也明显加快,但由于一些历史性因素的制约,其发展速度仍远远滞后于城市建设发展的进程。社会发展越迅速,环卫发展的一些矛盾和问题便越突出:环卫管理体制不合理,环卫行业历史包袱沉重,环卫工人待遇偏低,环卫设施条件落后,环卫作业模式落后,科技化程度低,环卫资金投入不足、多度依赖市场等已经成为了制约环卫事业发展的瓶颈,面对如此紧迫的发展形势,作为环卫企业,我们有清晰的认识,能正确的面对,树立新理念,寻找新抓手,创造新水平。 (一)管理运作思路创新 准确的管理定位和恰当的模式选择,是提高环卫管理质量,确保环卫改革目标实现的关键。根据对市政治、经济、文化、环卫管理现状、环卫改革目标等因素的考察及本公司多年的专业管理经验,根据国内外城市环卫先进管理理论与实践,对本区域内环卫管理模式选择如下: 1、社会化环卫管理必须实现组织管理方式创新 建立科学的组织管理方式,改变原环卫管理中落后的条块模式,促进扁平化矩阵组织形式,强化信息化、数字化组织管理。只有组合先进的管理技术,运行动态灵活的管理机制,才能保证环卫管理的组织效率。我公司对本项目各条道路保洁将实行扁平化矩阵式的管理模式。在公司领导的统一指挥下,充分发挥项目经理、各管理人员、作业班长等骨干作用,紧紧依靠全体员工,通过科学的管理组织,进行优质、高效、专业的保洁服务。其要点是:公司实行内部项目成本核算;质检部和项目经理负责对本项目道路清扫保洁质量的监管考核;项目运作实行实时机动巡回督促检查。 2、社会化环卫管理必须革新专业技术组合方式 社会化环卫管理要想实现环卫领域的技术变革,一方面,需要对原来的管理技术予以提升,整体提升环卫管理新模式的生产效率与质量保障系统动作能力;
小型清扫车 文档
1结构设计 本文设计的垃圾清扫车结构及组成如图2所示。部分技术参数如下:1)盘刷电动机,48V,额定功率110W,转速60r/min;2)滚刷电动机,48V,额定功率40W,转速30r/min;3)鼓风机,48V,额定功率30W,风速0.92m3/min,风压为150Pa,回转式风机;4)工作速度Vmax=5km/h;5)清洁宽度(主刷+边刷)为1569mm。清扫装置是由盘刷和滚刷两部分组合,盘刷的底圆直径约为713mm,盘刷组合的最大宽度约为1569mm,大于车体的最大宽度,便于清扫台阶角落处的清扫盲区。 滚刷的刷辊直径为70mm,苗高70mm,最大外圆直径为210mm。在清扫时,使用者将手控杆向下按到指定位置并扣住,在连杆机构的作用下,使盘刷向前倾斜约15°,与地面接触的刷毛长度约45mm;滚刷向下移动约40mm的距离,与地面形成宽度约为30mm的接触面积。而在不清扫时可将手控杆抬起到原来位置并扣住,此时盘刷与滚刷都处于悬空状态,减少非工作状态下垃圾车与地面的摩擦力,增加垃圾车运动的灵活性。运动装置由2个大轮和1个万向轮组成,这3个轮子同时承担整个车体的重量,由于万向轮的灵活性,适合清扫较为不平的路面。 防扬尘装置是由喷水装置和空气净化装置组成。喷水装置由水箱、水泵、水管、喷头组成,水泵将水箱中的水抽出并在喷头处喷出,由于喷头的孔较小,所以形成雾化环境,喷头安装位置在滚刷的上方,由于雾化作用,粉尘被吸附到小水珠的表面,防止扬尘。空气净化装置由过滤器、鼓风机和管道组成,位于车体的前方,由于鼓风机的吸力,车体内部的空气经过过滤器被排到外部,形成车体内部与外部的空气循环与净化的过程(见图3,图中箭头表示空气循环方向)。 垃圾收集装置的是可抽拉式垃圾仓,在垃圾仓底部有一定数量的小孔,方便垃圾中的泔水流出,在垃圾仓的前部有1块固定的倾斜板,用于引导垃圾向垃圾仓的深处移动,避免垃圾堆积在垃圾仓的前部,垃圾仓底部有4个滑轮,便于操作人员将垃圾仓抽出进行倾倒垃圾。 2结语 在该人力式垃圾清扫车的设计中,整车采用人工推动,蓄电池提供动力使垃圾清扫盘刷与滚刷转动的方式使清扫车工作。结构和操作简单,节能环保,降低了成本和其他昂贵费用。有利于清洁部门接受和大规模推广。该清扫车的成功使用,必将大大减轻城市环卫工作人员的压力,节省人力财力资源,提高了城市清洁效率。
机械原理课程设计-自动制钉机
目录 1. 设计题目 (2) 1.1 工作原理及工艺过程 (2) 1.2 工艺数据 (2) 1.3 设计任务 (2) 1.4 课程设计目的 (2) 2. 运动循环图 (7) 3. 设计方案 (2) 3.1 设计思路 (2) 3.2 设计方案一 (3) 3.3 设计方案二 (3) 3.4 设计方案三 (4) 4. 最终方案 (4) 5. 所选方案的具体设计及分析 (4) 5.1 机构各部分设计和分析 (4) 5.1.1 送料校直机构设计与分析 (4) 5.1.2 夹紧机构设计与分析 (5) 5.1.3 冷镦机构设计与分析 (5) 5.1.4 冷挤机构设计与分析 (6) 5.1.5 切断机构设计与分析 (6) 5.2齿轮马达动力原件图 (6) 6. 课程设计总结 (8) 7. 参考资料 (8)
1.设计题目 1)钢钉是用途极为广泛的建筑五金制品尤其在当今的建筑行业中需要大量的钢钉作为劳动的工具,所以要高效、合理、廉价地生产出钢钉需要一套整体结构紧凑,科学合理,性能稳定,操作简单简便利的自动制钉机. 2)自动制钉机主要采用废旧钢筋来作为原料,通过拉直,镦尖等工序来生产我们日常生活中的所用圆钉子,具有原材料易取、广泛,投资较少等优点. 1.1 工作原理及工艺动作过程 制造木工用大大小小的铁钉是将一卷直径与铁钉直径相等的低碳钢丝通过下列工艺动作来完成的。 1)校直钢丝,并按节拍要求间歇地输送到装夹工位。 2)冷镦钉帽,在此前需夹紧钢丝。 3)冷挤钉尖。 4)剪断钢丝。 5)夹丝装置释放,重新输送钢丝。 1.2 原始数据和设计要求 1)铁钉直径为Φ1.6—Φ3.4mm。 2)铁钉长度为25—80mm。 3)生产率为360枚/min。 4)最大冷镦力为3000N,最大剪断力为2500N。 5)冷镦滑块质量为8kg,其他构件质量和转动惯量不计。 6)要求结构紧凑,传动性能优良,噪声尽量小。 1.3 设计任务 1)根据工艺动作要求拟定运动循环图。 2)进行送丝校直机构、冷镦钉帽机构、冷挤钉尖机构、剪断钢丝机构的选型。 3)机械运动方案的评定和选择。 4)根据选定的原动机和执行机构的运动参数拟定机械传动方案,分配传动比,并在图纸上画出传动方案图。 5)对机械传动系统和执行机构进行运动尺寸计算。 6)画出机械运动简图。 7)对执行机构进行运动分析,画出运动线图,进行运动模拟。 8)编写设计计算说明书。 1.4 课程设计目的 1)综合运用机械原理课程的理论知识,分析和解决与本课程有关的实际问题,使所学知识进一步巩固和加深。 2)得到初步的机械选型与组合以及确定运动方案、创新机械产品能力的训练。 3)提高绘图、表达、计算机应用和查阅资料的能力。