步进电机110BYG系列参数选用.doc
详细介绍
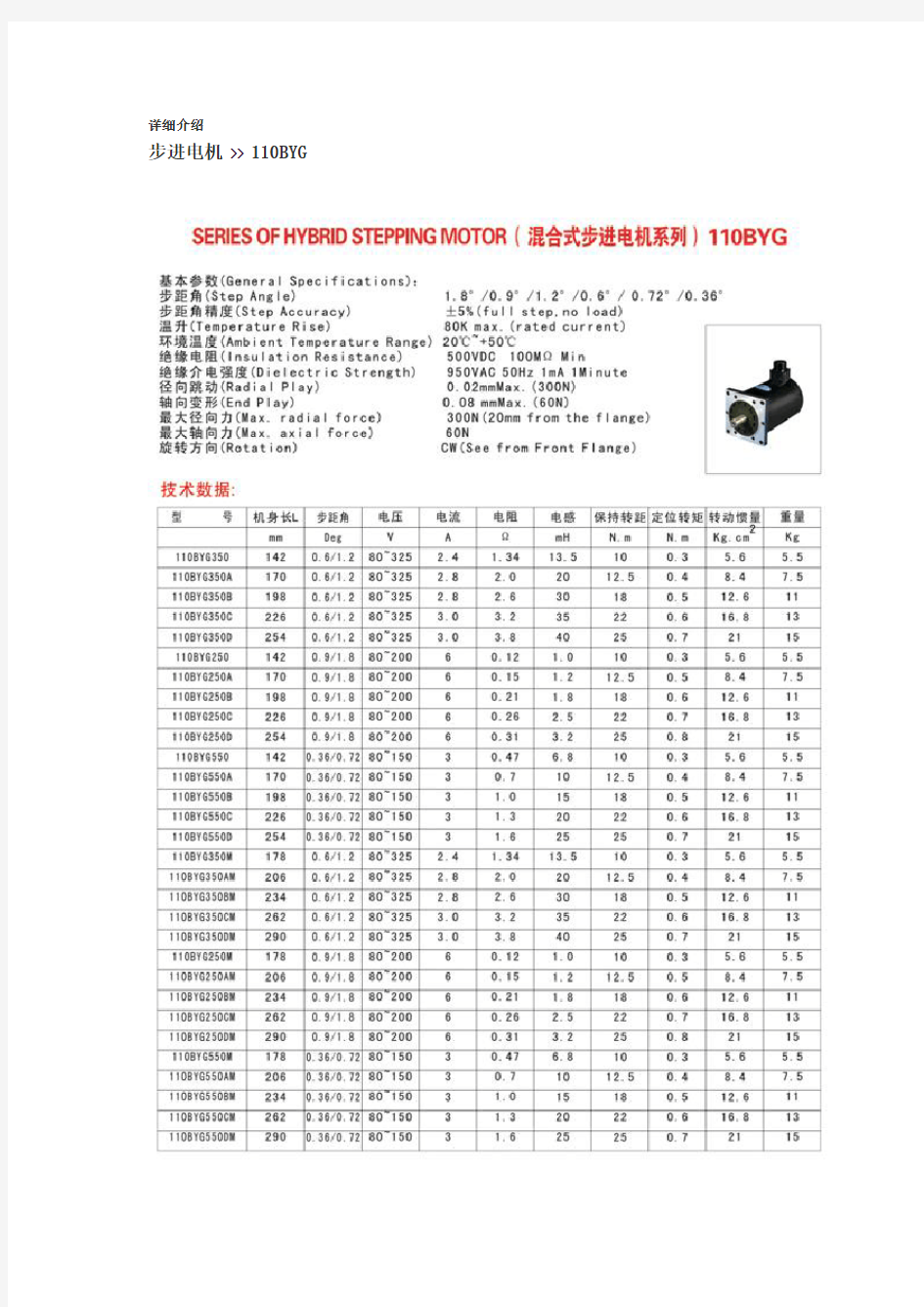
步进电机 >> 110BYG
步进电机常识与矩频曲线
步进常识 1. 什么是步进电机? 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2. 步进电机分哪几种? 步进电机分三种:永磁式(PM ,反应式(VR和混合式(HB 永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5 度或15 度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5 度,但噪声和振动都很大。在欧美等发达国家80 年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8 度而五相步进角一般为0.72 度。这种步进电机的应用最为广泛。 3. 什么是保持转矩(HOLDING TORQUE? 保持转矩(HOLDINGORQUE是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进 电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为
了衡量步进电机最重要的参数之一。比如,当人们说2N.m 的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电机。 4. 什么是DETENT TORQU起动转扭) DETENTTORQU是指步进电机没有通电的情况下,定子锁住转子的力矩。DETEN T ORQUEE国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQ U E 5. 一般步进电机的精度为步进角的3-5%,且不累积。 6. 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至 于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130 度以上,有的甚至高达摄氏200 度以上,所以步进电机外表温度在摄氏80-90 度完全正常。7. 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越 高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。 8. 为什么步进电机低速时可以正常运转, 但若高于一定速度就无法启动, 并伴 有啸叫声?
步进电机参数及含义
步进电机参数及含义 1、步进角: 当步进驱动器接收到一个脉冲信号,它所驱动步进电机按设定的方向转动的一个固定角度。 2、保持转矩(HOLDING TORQUE): 保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。 3、DETENT TORQUE: DETENT TORQUE是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。 4、精度: 一般步进电机的精度为步进角的3-5%,且不累积。 5、空载启动频率: 步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。 6、四相混合式步进电机与驱动器的串联接法和并联接: 四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。串联接法一般在电机转速较的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。 7、纹波电压: 纹波电压一般是指直流电源输出端含有交流电压是多少V,属称纹波电压或纹波系数。 8、如何确定步进电机驱动器的直流供电电源: A.电压的确定 混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。 B.电流的确定 供电电源电流一般根据驱动器的输出相电流I来确定。如果采用线性电源,电源电流一般可取I的1.1~1.3倍;如果采用开关电源,电源电流一般可取I的1.5~2.0倍。
步进电机扭矩计算
Z406 数控坐标台式钻床主轴自动 进给步进电机扭矩的设计计算 陆扬 [菲尼克斯亚太电气(南京) 有限公司,江苏南京211100 ] 设计Z406 数控坐标台式钻床时,对主轴自动进给步 进电机扭力矩的设计计算介绍如下: 该数控坐标台式钻床设计要求:1) 最大钻孔直径为 d 6mm; 2) 钻削材料为碳素结构钢σb = 65kgf/ mm2 , HB170~200 ;3) 切削刀具为高速钢W18Cr4V 钻头,加冷 却液;4) 进给量0. 2mm/ r 。 1 主轴轴向力计算 计算公式为: P = 61. 2 ×D ×S0. 7 。其中P 为轴向力 / kN ; D 为最大钻孔直径/ mm; S 为主轴每转进给量。 P = 61. 2 ×D ×S0. 7 = 61. 2 ×6 ×0. 20. 7≈11166kN , 考虑到摩擦力,传动效率等因数,取轴向力P = 1147kN 进行以下计算。 2 主轴套筒受力分析和计算(图1) Ft = 圆周力; Fr = 径向力; F = 法向力= 1147kN Ft 为F cosα= 150 ×cos20°= 1138kN Fr 为F sinα= 150 ×sin20°= 015kN 现将轴向力平移至主轴套筒D 点,需加一个力矩M = P ×d/ 2 = 150 ×1. 8cm≈2165kN·cm , M 的值即是最
大阻力矩M 阻。只有当M主> M阻时, 主轴套筒才能向下 运动,进行钻削加工。现根据结构需要初步选择最大静扭 力矩为196N·cm 的步进电机作为主轴的自动进给电机, 由于电机的最大静力矩Mj ,max = 196N·cm < M阻, 所以 将电机通过少齿差减速器减速80 倍后再输出,故从理论 上电机的最大静力矩Mj ,max 也将相应增加到Mj ,max = 196N·cm ×80 = 15168kN·cm ,此时Mj ,max = 196N·cm ×80 = 15168kN·cm > M阻。根据步进电机原理有关资料介绍,当步进电机在运行频率增大或负载增大时,步进电机 的输出扭力矩将大大下降,即有M/ Mj ,max c = 0. 2~0. 5 (此为经验系数) ,现取系数0. 2 ,则在钻床最大负荷时,电 机的输出扭力矩M主= 15168kN·cm ×0. 2 = 15168kNcm , 即M主> M阻≈21645kN·cm ,所以该电机经减速80 倍 后,可以保证在最大切削负荷时也可以满足使用,步进电 机(该电机的步距角为0. 75°) 也不会产生失步现象。 收稿日期:2006208222 (上接第55 页) 4 结束语 本测量系统实用性强,能够巡回采集测量多路信号, 结构较为简单,成本低,精度较高。系统的可扩展性强,可 通过单片机的串行口连接RS232 转换芯片MAX232 与数 控机床相连,完成实时数据的传递和其他控制工作。在实
步进细分的算法
1、步进电机的步距角,比如说,1.8度,则一个圆周360/1.8=200,也就是说200个脉冲,电机旋转一周。 2、驱动器设了几个细分,请查阅相关资料,比如说4细分,则承上所述,200*4=800,等于说800个脉冲电机才旋转一周。 3、一周的导程:如果是丝杠,螺距*螺纹头数=导程,如果是齿轮齿条传动,分度圆直径(m*z)即为导程,导程/800=一个脉冲的线位移。 有关步进电动机驱动系统的基本知识 1、系统常识:步进电动机和步进电动机驱动器构成步进电机驱动系统。步进电动机驱动系统的性能,不但取决于步进电动机自身的性能,也取决于步进电动机驱动器的优劣。对步进电动机驱动器的研究几乎是与步进电动机的研究同步进行的。 2、系统概述:步进电动机是一种将电脉冲转化为角位移的执行元件。当步进电动机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电动机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。 3、系统控制:步进电动机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电动机驱动器)。控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 4、用途:步进电动机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电动机驱动器性能提高),步进电动机的需求量与日俱增。步进电动机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。 5、步进电机按结构分类:步进电动机也叫脉冲电机,包括反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)等。 (1)反应式步进电动机:也叫感应式、磁滞式或磁阻式步进电动机。其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到10?);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。 (2)永磁式步进电动机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。 (3)混合式步进电动机:也叫永磁反应式、永磁感应式步进电动机,混合了永磁式和反应式的优点。其定子和四相反应式步进电动机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。一般为两相或四相;须供给正负脉冲信号;输出转矩
步进电机基本知识
步进电机基本知识(2009-01-08 13:51:30) 1、步进电机:是一种将电脉冲转化为角位移或线位移的执行机构。其特点是没有积累误差(精度为100%),广泛应用于各种开环控制。 2、步进电机分类:永磁式(PM),反应式(VR),混合式(HB)。 3、保持转矩:是指步进电机通电,但没有转动时,定子锁住转子的力矩。 4、精度:为步进角的3~5%,且不累积。 5、细分驱动器:是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机的运转的。细分功能完全是由驱动器靠精确控制电机的相电流所产生的,与电机无关。对于2,4相电机,细分后的步距角等于电机的整步步距角除以细分数。对于3相反应式电机,细分后的步距角等于电机的半步步距角除以细分数。 6、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。0.9°/1.8°(表示半步工作时为0.9°,整步工作时为1.8°)此步距角为电机固有步距角。 7、相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 8、失步:电机运转时运转的步数,不等于理论上的步数。称之为失步。 9、最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。 10、最大空载运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。 11、步进电机最好不使用整步状态,整步状态时振动大。 12、电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。方向由导电顺序决定。控制步进脉冲信号的频率,可以对电机进行精确调速;控制步进脉冲的个数,可以对电机进行精确定位。
13、步进电机驱动器:是把计算机控制系统提供的弱信号放大为步进电机能够接受的强电流信号。 14、拍数:是完成一个磁场周期性变化所需脉冲数。指电机转过一个齿距角所需脉冲数。 15、脱机信号free:此信号为选用信号,并不是必须要用的,只有在一些特殊情况下使用,此端为低电平有效,这时电机处于无力矩状态;此端为高电平或悬空不接时此功能无效,电机可正常运行,此功能若用户不采用,只需将此端悬空即可。 16、CP脉冲宽度一般要求不小于2us。 17、CP电平方式:对于共阳接法的驱动器要求为负脉冲方式,脉冲状态为低电平,无脉冲时为高电平;对于共阴接法的驱动器要求为正脉冲方式,脉冲状态为高电平,无脉冲时为低电平。 18、dir信号:一定要在电机降速停止后再换向。 19、步进电机在启动时,必须有升速过程;在停止时必须有降速过程,一般来说升速过程和降速过程规律相同。特例:步进电机运行速度不超过突跳频率,这时不存在升降速问题。 20、自动半电流功能:驱动机在步进脉冲信号停止施加2S左右,会自动进入半电流状态,这时电机相电流为运行时的一半,以减少功耗和保护电机。 21、细分优点:完全消除了电机的低频振荡。 22、步进电机的工作性能在很大程度上取决于所使用的驱动电路的类型和参数。 23、常用的有两相,四相混合式步进电机。 24、电机是有内阻的感性负载。 25、步进电机驱动方式:恒压,恒流,恒流斩波,使同样电机输出更大速度和功率。 26、步进电机启动:A、低初速度,低加速度阶段
步进电机——步进电机选型的计算方法
步进电机——步进电机选型的计算方法 步进电机选型表中有部分参数需要计算来得到。但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。 ◎驱动模式的选择 驱动模式是指如何将传送装置的运动转换为步进电机的旋转。 下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。 ●必要脉冲数的计算 必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。必要脉冲数按下面公式计算: 必要脉冲数= 物体移动的距离 距离电机旋转一周移动的距离× 360 o 步进角 ●驱动脉冲速度的计算 驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。 驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。 (1)自启动运行方式 自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。 自启动运行方式通常在转速较低的时候使用。同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。 自启动运行方式的驱动脉冲速度计算方法如下: 驱动脉冲速度[Hz]= 必要脉冲数[脉冲]
定位时间[秒] (2)加/减速运行方式 加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。 加/减速时间需要根据传送距离、速度和定位时间来计算。在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。加/减速运行方式下的驱动脉冲速度计算方法如下: 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 驱动脉冲速度[Hz]= 定位时间[秒]-加/减速时间[秒] ◎电机力矩的简单计算示例 必要的电机力矩=(负载力矩+加/减速力矩)×安全系数 ●负载力矩的计算(TL) 负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。步进电机驱动过程中始终需要此力矩。负载力矩根据传动装置和物体的重量的不同而不同。许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。 负载力矩可以根据下面的图表和公式来计算。 (1)滚轴丝杆驱动
步进电机常识与矩频曲线
步进常识 1.什么是步进电机? 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2.步进电机分哪几种? 步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。 这种步进电机的应用最为广泛。 3.什么是保持转矩(HOLDING TORQUE)? 保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进
电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电机。 4.什么是DETENT TORQUE?(起动转扭) DETENT TORQUE 是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。 5.步进电机精度为多少?是否累积? 一般步进电机的精度为步进角的3-5%,且不累积。 6.步进电机的外表温度允许达到多少? 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。 7.为什么步进电机的力矩会随转速的升高而下降?
步进电机原理介绍
步进电机也叫步进器,它利用电磁学原理,将电能转换为机械能,人们早在20世纪20年代就开始使用这种电机。随着嵌入式系统(例如打印机、磁盘驱动器、玩具、雨刷、震动寻呼机、机械手臂和录像机等)的日益流行,步进电机的使用也开始暴增。不论在工业、军事、医疗、汽车还是娱乐业中,只要需要把某件物体从一个位置移动到另一个位置,步进电机就一定能派上用场。步进电机有许多种形状和尺寸,但不论形状和尺寸如何,它们都可以归为两类:可变磁阻步进电机和永磁步进电机。本文重点讨论更为简单也更常用的永磁步进电机。 步进电机的构造 如图1所示,步进电机是由一组缠绕在电机固定部件--定子齿槽上的线圈驱动的。通常情况下,一根绕成圈状的金属丝叫做螺线管,而在电机中,绕在齿上的金属丝则叫做绕组、线圈、或相。如果线圈中电流的流向如图1所示,并且我们从电机顶部向下看齿槽的顶部,那么电流在绕两个齿槽按逆时针流向流动。根据安培定律和右手准则,这样的电流会产生一个北极向上的磁场。
现在假设我们构造一个定子上缠绕有两个绕组的电机,内置一个能够绕中心任意转动的永久磁铁,这个可旋转部分叫做转子。图2给出了一种简单的电机,叫做双相双极电机,因为其定子上有两个绕组,而且其转子有两个磁极。如果我们按图2a所示方向给绕组1输送电流,而绕组2中没有电流流过,那么电机转子的南极就会自然地按图中所示,指向定子磁场的北极。 再假设我们切断绕组1中的电流,而按图2b所示方向给绕组2输送电流,那么定子的磁场就会指向左侧,而转子也会随之旋转,与定子磁场方向保持一致 接着,我们再将绕组2的电流切断,按照图2c的方向给绕组1输送电流,注意:这时绕组1中的电流流向与图2a所示方向相反。于是定子的磁场北极就会指向下,从而导致转子旋转,其南极也指向下方。 然后我们又切断绕组1中的电流,按照图2d所示方向给绕组2输送电流,于是定子磁场又会指向右侧,从而使得转子旋转,其南极也指向右侧。。 最后,我们再一次切断绕组2中的电流,并给绕组1输送如图2a所示的电流,
步进电机细分控制(英文)
1/17 AN1495 APPLICATION NOTE 1INTRODUCTION Microstepping a stepper motor may be used to achieve one or both of two objectives; 1) increase the position resolution or 2) achieve smoother operation of the motor. In either case the basic the-ory of operation is the same. The simplified model of a stepper motor is a permanent magnet rotor and two coils on the stator separated by 90 degrees, as shown in Figure 1. In classical full step operation an equal current is delivered to each of the coils and the rotor will align itself with the resulting magnetic vector along one of the 45 degree axis. To step the motor, the current in one of the two coils is reversed and the rotor will rotate 90 degrees. The complete full step sequence is shown in figure 2. Half step drive,where the current in the coil is turned off for one step period before being turned on in the opposite direction, has been used to double the step resolution of a motor. In either full and half step drive,the motor can be positioned only at one of the 4 (8 for half step) defined positions.[4][5] Therefore,the number of steps per electrical revolution and the number of poles on the motor determine the resolution of the motor. Typical motors are designed for 1.8 degree steps (200 steps per revolution)or 7.5 degree steps (48 steps per revolution). The resolution may be doubled to 0.9 or 3.75 degrees by driving the motor in half step. Further increasing the resolution requires positioning the rotor at positions between the full step and half step positions. Figure 1. Model of stepper motor MICROSTEPPING STEPPER MOTOR DRIVE USING PEAK DETECTING CURRENT CONTROL Stepper motors are very well suited for positioning applications since they can achieve very good positional accuracy without complicated feedback loops associated with servo sys-tems. However their resolution, when driven in the conventional full or half step modes of operation, is limited by the configuration of the motor. Many designers today are seeking alternatives to increase the resolution of the stepper motor drives. This application note will discuss implementation of microstepping drives using peak detecting current control where the sense resistor is connected between the bottom of the bridge and ground. Examples show the implementation of microstepping drives with several currently available chips and chip sets. REV . 2AN1495/0604
全的有关步进电机的基础知识
第一步:步进电机的保持转矩,相当于传统电机所说的“功率”。当然,他们有着本质的区别。步进电机的物理结构,完全不同于普通的交、直流电机,它的输出功率是可变的。通常根据需要的转矩大小,来选择哪种型号的步进电机。大致来说,扭力在0.8n.m以下的,一般选择28、35、39、42;扭力在1N.m左右的,选择57电机较为合适。扭力在几N.m或更大的情况下,就应当选择转矩更大的75、85、86、90、110、130等规格的步进电机。同时,我们还应考虑电机的转速。因为,电机的输出转矩,与转速成反比关系。就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩就很小了。当然,有些工作环境需要高速电机,就要对步进电机的线圈电阻、电感等指标进行综合权衡。选择电感稍小一些的电机,作为高速电机,能够获得较大输出转矩。反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。 第二步:步进电机空载启动频率,一般称为“空起频率”。这是选购步进电机很重要的一项指标。如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右或更高。最好选择反应式或永磁式步进电机,这些电机的“空起频率”都比较高。 第三步:步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。其实,不同相数的电机,工作效果是不同的。相数越多,步距角就能够做的比较小,工作时的振动就相对小一些。大多数场合,使用两相、三相、五相混合式步进电机的比较多。在高速大力矩的工作环境,选择三相步进电机是很实用的。
第四步:防水防腐型步进电机能够防水、防油,适用于某些特殊场合。例如水下机器人,就需要放水电机。75BYG系列步进电机大多具有防水结构。对于特种用途的电机,就要针对性选择了。 第五步:特殊规格的步进电机,通常需要和生产厂家沟通,在技术允许的范围内,加工订做。例如,出轴的直径、长短、伸出方向等。 No2.步进电机的噪音控制方法 步进电机的运转难免会有很大的噪音,在工厂这些噪音其实不算什么,工厂里多的是机械,各式各样的,一起运转,那么多的噪音,就好像在开一场演唱会,只是是我们听不懂的,很刺耳的。 噪音大听不到不要紧,但是在工厂里面的操作工难免就要遭罪了,操作工之间讲话都是问题,不用吼得是听不到了,久而久之,他们的听觉也会有一点受到影响。那该如何减少这些机器的噪声呢? 第一,可以通过改变减速比等机械传动避开共振区; 第二,可以采用带有细分功能的驱动器; 第三,可以换成步距角更小的步进电机; 第四,可以换成交流伺服电机,几乎可以完全克服震动和噪声; 第五,可以在电机轴上加磁性阻尼器。 步进电机高速不能直接使用普通的交直流电源,需要专用的伺服控制器,应注意以下特点:
步进电机的基本参数定义
步进电机的基本参数定义 电机固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如FY56ES300A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为“电机固有步距角”,它不一定是电机工作时的实际步距角,实际步距角和驱动器有关。 步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电动机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。步进电动机增加相数能提高性能,但步进电机的结构和驱动电源都会更复杂,成本也会增加。 保持转矩(HOLDING TORQUE):也叫最大静转矩,是在额定静态电流下施加在已通电的步进电机转轴上而不产生连续旋转的最大转矩。它是步进电机最重要的参数之一,通常步进电动机在低速时的力矩接近保持转矩。由于步进电动机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参
数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m 的步进电动机。 步距精度:可以用定位误差来表示,也可以用步距角误差来表示。 矩角特性:步进电机的转子离开平衡位置后所具有的恢复转矩,随着转角的偏移而变化。步进电动机静转矩与失调角的关系称为矩角特性。 静态温升:指电机静止不动时,按规定的运行方式中最多的相数通以额定静态电流,达到稳定的热平衡状态时的温升。 动态温升:电机在某一频率下空载运行,按规定的运行时间进行工作,运行时间结束后电机所达到的温升叫动态温升。 转矩特性:它表示电机转矩和单相通电时励磁电流的关系。 启动矩频特性:启动频率与负载转矩的关系称为启动矩频特性。 升降频时间:指电机从启动频率升到最高运行频率或从最高运行频率降到启动频率所需的时间。 DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE 在国内没有统一的翻译方式,容易产生误解;反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
步进电机选型的计算方法[1]
步进电机选型表中有部分参数需要计算来得到。但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。 ◎驱动模式的选择 驱动模式是指如何将传送装置的运动转换为步进电机的旋转。 下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。 ●必要脉冲数的计算 必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。必要脉冲数按下面公式计算: 必要脉冲数= 物体移动的距离 距离电机旋转一周移动的距离× 360 o 步进角 ●驱动脉冲速度的计算 驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。 驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。 (1)自启动运行方式 自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。 自启动运行方式通常在转速较低的时候使用。同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。 自启动运行方式的驱动脉冲速度计算方法如下: 驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒]
(2)加/减速运行方式 加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。 加/减速时间需要根据传送距离、速度和定位时间来计算。在加/减速运行方式中,因为速度变化较小, 所以需要的力矩要比自启动方式下的力矩小。加/减速运行方式下的驱动脉冲速度计算方法如下: 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 驱动脉冲速度[Hz]= 定位时间[秒]-加/减速时间[秒] ◎电机力矩的简单计算示例 必要的电机力矩=(负载力矩+加/减速力矩)×安全系数 ●负载力矩的计算(T L) 负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。步进电机驱动过程中始终需要此力矩。负载力矩根据传动装置和物体的重量的不同而不同。许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。 负载力矩可以根据下面的图表和公式来计算。 (1)滚轴丝杆驱动
步进电机的细分
步进电机的细分 步进电机是一种将离散的电脉冲信号转化成相应的角位移或线位移的电磁机械装置,它具有转矩大、惯性小、响应频率高等优点,已经在当今工业上得到广泛的应用,但其步矩角较大,一般为1.5o~3o,往往满足不了某些高精密定位、精密加工等方面的要求。实现细分驱动是减小步距角、提高步进分辨率、增加电机运行平稳性的一种行之有效的方法。本文在选择了合理的电流波形的基础上,提出了基于Intel 80C196MC 单片机控制的步进电机恒转矩细分驱动方案,其运行功耗小,可靠性高,通用性好,具有很强的实用性。 细分电流波形的选择及量化 步进电机的细分控制,从本质上讲是通过对步进电机的励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。因此,要想实现对步进电机的恒转矩均匀细分控制,必须合理控制电机绕组中的电流,使步进电机内部合成磁场的幅值恒定,而且每个进给脉冲所引起的合成磁场的角度变化也要均匀。我们知道在空间彼此相差2p/m的m相绕组,分别通以相位上相差2p/m而幅值相同的正弦电流,合成的电流矢量便在空间作旋转运动,且幅值保持不变。这—点对于反应式步进电机来说比较困难,因为反应式步进电机的旋转磁场只与绕组电流的绝对值有关,而与电流的正反流向无关。以比较经济合理的方式对三相反应式步进电机实现步距角的任意细分,绕组电流波形宜采用如图1所示的形式。 图中,a为电机转子偏离参考点的角度。ib滞后于ia,ic超前于ia。此时,合成电流矢量在所有区间b=Ime-ja,从而保证合成磁场幅值恒定,实现电机的恒转矩运行。且步进电机在这种情况下也最为平稳。将绕组电流根据细分倍数均匀量化后,所得细分步距角也是均匀的。为了进一步得到更加均匀的细分步距角,可通过实验测取一组在通入量化电流波形时的步进电机细分步距的数据,然后对其误差进行差值补偿,求得实际的补偿电流曲线。这些工作大部分由计算机来完成。 步进电机是一种将离散的电脉冲信号转化成相应的角位移或线位移的电磁机械装置,它具有转矩大、惯性小、响应频率高等优点,已经在当今工业上得到广泛的应用,但其步矩角较大,一般为1.5o~3o,往往满足不了某些高精密定位、精密加工等方面的要求。实现细分驱动是减小步距角、提高步进分辨率、增加电机运行平稳性的一种行之有效的方法。本文在选择了合理的电流波形的基础上,提出了基于Intel 80C196MC单片机控制的步进电机恒转矩细分驱动方案,其运行功耗小,可靠性高,通用性好,具有很强的实用性。
步进电机的选用及电机型号参数尺寸标准
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。一般地说最大静力矩Mjmax大的电机,负载力矩大。 选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分辨率,不改变其精度。精度是由电机的固有特性所决定。论文天地欢迎您 选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。 选择步进电机需要进行以下计算: (1)计算齿轮的减速比 根据所要求脉冲当量,齿轮减速比i计算如下: i=(φ.S)/(360.Δ) (1-1) 式中φ---步进电机的步距角(o/脉冲)
S ---丝杆螺距(mm) Δ---(mm/脉冲) (2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。 Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2) 式中Jt ---折算至电机轴上的惯量(Kg.cm.s2) J1、J2 ---齿轮惯量(Kg.cm.s2) Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N) S ---丝杆螺距(cm) (3)计算电机输出的总力矩M M=Ma+Mf+Mt (1-3) Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4) 式中Ma ---电机启动加速力矩(N.m) Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2) n---电机所需达到的转速(r/min) T---电机升速时间(s) Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5) Mf---导轨摩擦折算至电机的转矩(N.m) u---摩擦系数 η---传递效率 Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6) Mt---切削力折算至电机力矩(N.m) Pt---最大切削力(N) (4)负载起动频率估算。数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为 fq=fq0[(1-(Mf+Mt))/Ml)÷(1+Jt/Jm)] 1/2 (1-7) 式中fq---带载起动频率(Hz)
步进电机脉冲数量与运动距离的计算 (1)
步进电机一个脉冲运动距离怎么算? 步进电机一个脉冲运动距离怎么算?能不能给个公式在举个例子? 答案: 用360度去除以步距角,就是电机转一圈的脉冲数,当然如果细分的话,还要乘以细分倍数。电机转一圈丝杠前进一个导程,用导程除以一圈的脉冲数就是脉冲运动距离。 第一步确定步进电机的步距角,这个电机上会标明的。比如说,1.8度,则一个圆周360/1.8=200,也就是说电机旋转一周需要200个脉冲。 第二步确定电机驱动器设了细分细分没有,查清细分数,可以看驱动器上的拨码。比如说4细分,则承上所述,200*4=800,等于说800个脉冲电机才旋转一周。第三步确定电机轴一周的长度或者说导程:如果是丝杠,螺距*螺纹头数=导程,如果是齿轮齿条传动,分度圆直径(m*z)即为导程,导程/脉冲个数=一个脉冲的线位移。 什么是细分呢?和几相是一个意思吗?和几相没关系吗? 细分和相数没关系。以1.8度为例,原来一个脉冲走1.8度,现在改为4细分,那么现在一个脉冲只能走1.8/4度了。细分越多,每个脉冲的步进长度越短。细分的多少可由驱动器设置。 控制步进电机转多少最主要你得通过步进电机步距角度计算出电机转一圈需要多少脉冲,比如步距角度为0.9°则电机转一圈需要给步进电机驱动器360/0.9=400个脉冲,转半圈就是200个脉冲。步进电机驱动器资料你先了解下! 步进电机转速则通过改变脉冲频率来控制,用plc的pwm输出控制是比较方便的,速度的快慢不影响步进电机的行程,行程多少取决于脉冲数量。 注意一点步进电机速度越快转矩越小,请根据你的应用调节速度以防失步,造成走位不准确。步进电机是接收步进驱动器给过来的脉冲信号,比如两相的步进,AB相分别轮流输出正反脉冲(按一定顺序),步进电机就可以运行了,相当于一定的脉冲步进马达对应走一定旋转角度。而PLC也可以发出脉冲,但脉冲电压不够,所以需要把PLC输出的脉冲给步进驱动器放大来驱动步进驱动器,相当于PLC的脉冲就是指令脉冲。一般PLC驱动步进时候有两路信号,一路是角度脉冲,另外一路是方向脉冲,PLC里边一般配所谓位移指令,发梯形脉冲给步进驱动器,这样可以缓冲启动带来的力冲击。 51单片机控制两相四线步进电机的问题 单片机为AT89S52。。步进电机为:57HS5630A4步进电机。链接:Error! Hyperlink reference not valid.步进电机驱动器为:M542中性步进电机驱动器。链接:Error! Hyperlink reference not valid. 现在的问题是:步进电机我已经和驱动器连接好了,现在步进电机驱动器有6 个线和51单片机相连,分别是PUL+、PUL-、DIR+、DIR-、ENA+、ENA- 。我想知道的是,比如这六个和单片机的P1.X口相连。怎么在单片机上控制步进电机正转反转,转的角度,转的速度。 答案: 首先,六根线的三根负线可以全部接地..和单片机P1相连的只需三根即可..这三根线为了保证能驱动起步进电机驱动器,应该分别上拉2K电阻.. 然后,在驱动器上的拨码处设置细分,,所谓细分是指电机转一圈所需多少脉冲..例如设置为800细分,即为电机转一圈需要800个脉冲..那么一个脉冲就会对应0.45度..单片机发出的脉冲频率高,那么电机转的就快..让电机转多少角度,就发出相应的脉冲数即可,例如转45度,就发出100个脉冲即可,在0.125s内发出100个脉冲,那转速就为1转/s。。