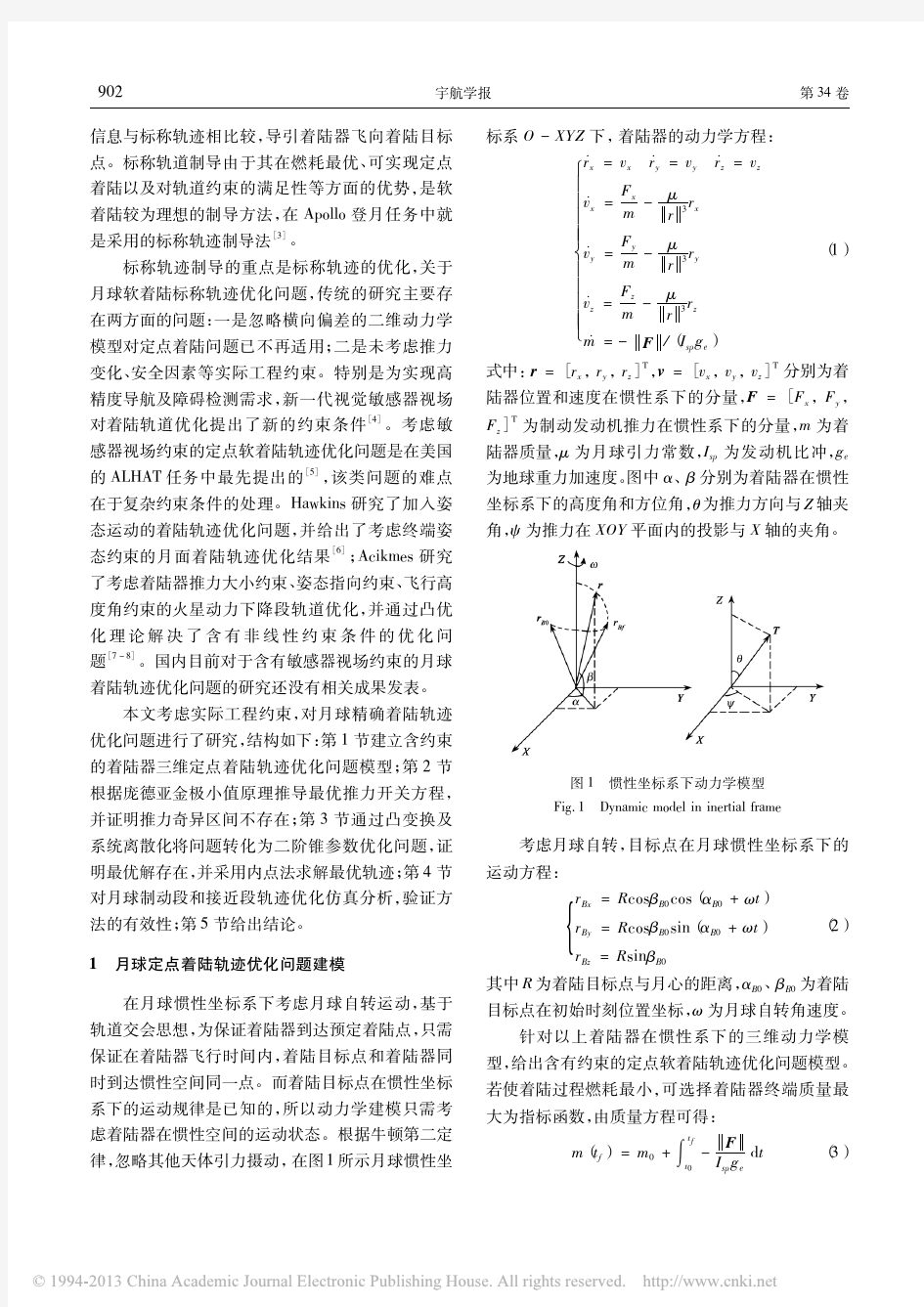
基于凸优化理论的含约束月球定点着陆轨道优化
约束最优化问题
约束最优化问题 一实习目的 1.熟练掌握科学与工程计算中常用的基本算法; 2.掌握分析问题,设计算法的能力; 3.掌握模块化程序设计的基本思想,注重模块的“高内聚,低耦合”; 4.采用自顶向下,逐步细化的编程思想完成程序书写; 5.牢固建立“清晰第一,效率第二”的软件设计观念; 6.掌握软件调试,测试的基本技能和方法; 7.提高科技报告的书写质量; 8.在掌握无约束最优化问题求解方法的前提下,对一般情形下的约束最优化问题进行研究,通过实习掌握外点罚函数法、内点罚函数法、乘子法、线性近似规划法和序列二次规划法在求解一般情形下的约束最优化问题的应用。 二问题定义及题目分析 问题1: 要求用外点罚函数法和内点罚函数法解决约束问题: Min f(x)=错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 问题2: 要求用乘子法解决约束问题: Min 错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 (错误!未找到引用源。) 问题3: 要求用线性近似规划法和序列二次规划法解决约束问题: Min 错误!未找到引用源。 s.t. 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 错误!未找到引用源。 三程序概要设计 1.外点罚函数法 Step1. 给定初始点错误!未找到引用源。,罚参数序列{错误!未找到引用源。}(常取错误!未找到引用源。),精度错误!未找到引用源。,并令k=0;
Step2. 构造增广目标函数错误!未找到引用源。; Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则:惩罚项充分小,或等价地错误!未找到引用源。近似可行)若错误!未找到引用源。,或者错误!未找到引用源。,错误! 未找到引用源。,则得解错误!未找到引用源。,否则令k=k+1,转 Step2. 2.内点罚函数法: Step1. 给定初始可行解错误!未找到引用源。,罚参数序列{错误!未找到引用源。}(常取错误!未找到引用源。),精度错误!未找到引用源。,并令 k=0; Step2. 构造增广目标函数错误!未找到引用源。; Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则)若错误!未找到引用源。,则得解错误!未找到引用源。,否则令k=k+1,转 Step2. 3.乘子法: Step1. 给定初始点错误!未找到引用源。,初始lagrange乘子错误!未找到引用源。,i错误!未找到引用源。罚参数序列{错误!未找到引用源。}, 精度错误!未找到引用源。,并令k=0; Step2. 构造增广目标函数错误!未找到引用源。 Step3. 求解无约束优化问题min 错误!未找到引用源。,x错误!未找到引用源。,其解记为错误!未找到引用源。; Step4. (终止准则)若错误!未找到引用源。,则得解错误!未找到引用源。,否则令 K=k+1,转Step2. 4.线性近似规划法: Step1. 给定初始点错误!未找到引用源。,步长限制错误!未找到引用源。,缩小系数错误!未找到引用源。。精度错误!未找到引用源。,并令k=0;Step2. 求解线性规划问题:min 错误!未找到引用源。
用外点法求解非线性约束最优化问题
题目:用外点法求解非线性约束最优化问题 学院信息管理学院 学生姓名余楠学号 81320442 专业数量经济学届别 2013 指导教师易伟明职称教授 二O一三年十二月
用外点法求解非线性约束最优化问题 摘要 约束最优化问题是一类重要的数学规划问题。本文主要研究了用外点罚函数法对约束非线性规划问题进行求解。对于一个约束非线性规划用罚函数求解的基本思路是通过目标函数加上惩罚项,将原约束非线性规划问题转化为求解一系列无约束的极值问题。本文最后利用c语言编程得到满足允许误差内的最优解。 本文主要对一个约束非线性规划问题的实例,首先利用上述迭代的方法,计算出各迭代点的无约束极值问题的最优解。然后应用c语言编程,得到精确地最优解,需迭代四次次才使得ε≤0.001,得到的最优解为* X=(333 .0)T。 .0, 666 关键词:外点罚函数法非线性规划约束最优化迭代最优解
一、背景描述 线性规划的目标函数和约束条件都是决策变量的线性函数,但如果目标函数或约束条件中含有决策变量的非线性函数,就称为非线性规划。非线性规划与线性规划一样,也是运筹学的一个极为重要的分支,它在经济、管理、计划、统计以及军事、系统控制等方面得到越来越广泛的应用。 非线性规划模型的建立与线性规划模型的建立类似,但是非线性规划问题的求解却是至今为止的一个研究难题。虽然开发了很多求解非线性规划的算法,但是目前还没有适用于求解所有非线性规划问题的一般算法,每个方法都有自己特定的适用范围。 罚函数法是应用最广泛的一种求解非线性规划问题的数值解法,它的基本思路是通过目标函数加上惩罚项,将原约束非线性规划问题转化为求解一系列无约束的极值问题。这种惩罚体现在求解过程中,对于企图违反约束的那些迭代点,给予很大的目标函数值,迫使这一系列无约束问题的极小值点无限的向可行集(域)逼近,或者一直保持在可行集(域)内移动,直到收敛于原来约束问题的极小值点。 外点法的经济学解释如下:若把目标函数看成“价格”,约束条件看成某种“规定”,采购人员在规定的范围内采购时价格最便宜,但若违反了规定,就要按规定加收罚款。采购人员付出的总代价应是价格和罚款的综合。采购人员的目标是使总代价最小,当罚款规定的很苛刻时,违反规定支付的罚款很高。这就迫使采购人员在规定的范围内采购。数学上表现为罚因子足够大时,无约束极值问题的最优解应满足约束条件,而成为约束问题的最优解。 二、基础知识 2.1 约束非线性优化问题的最优条件 该问题是一个约束非线性优化问题,利用外点罚函数法求解该问题,约束非线性优化问题的最优解所要满足的必要条件和充分条件是我们设计算法的依据,为此有以下几个定理。
凸优化——无约束问题的梯度方法
第三周读书笔记 1. 牛顿法 Pure Newton's Method 在上一章中具体讨论了梯度方法,该类方法只应用了一阶最优条件的信息,即梯度。此外,在讨论标度梯度法时还简单地讨论到Newton方法,该类方法进一步地应用到二阶最优条件地信息,即Hessian矩阵。该章重点介绍牛顿法,与梯度方法利用梯度进行新点迭代的方法不同,牛顿法的点更新方法如下:若假设函数在处的Hessian矩阵是正定矩阵,即。那上面的最小化问题有唯一的稳定点,也是全局最小点: 其中,向量也被称作牛顿方向,利用以上更新公式进行迭代的方法也被称作纯粹牛顿方法。算法流程图如下: 牛顿法要求在每次更新处的Hessian矩阵为正定矩阵。或者我们可以放宽一点条件——即在定义域内的任意点处的Hessian矩阵均为正定,这说明了存在一个唯一的最优解。但是,这并不能保证算法的收敛性。 事实上,牛顿法在某些假设下具备很好的收敛性能(称局部二次收敛)——令在上二阶连续可导,假设: 存在,对任意有 存在,对任意,有 令是牛顿方法得到的序列,是在上唯一最小值。那么对任意,以下不等式成立: 此外,如果,那么
证明如下: 事实上,对于某些不满足上述条件(正定、李普希兹连续)的优化问题,牛顿方法也能表现出收敛性。但是,总的来说,当缺少这些严格假设时收敛性无法得到保障。为了解决即使在Hessian矩阵正定也无法保障牛顿法的收敛性问题下,进一步地提出一种步长解决方案,即阻尼牛顿法。 阻尼牛顿法 在纯粹牛顿法的基础上,我们在进行迭代更新时,重新加入步长选择机制,如利用回溯法进行步长选择的阻尼牛顿法,算法流程如下:
cholesky分解 这一小节是针对前部分的补充知识——在利用牛顿法解决相关优化问题的时候,我们会遇到判断Hessian矩阵是否正定,以及求解线性系统的问题,这两个问题都可以通过cholesky分解来解决。 给定一个的正定矩阵,cholesky分解的形式为,其中是一个的下三角矩阵且其对角元素为正数。一般利用cholesky分解去解决线性系统分为以下两步: 1. 找到的解 2. 找到的解 可以通过一个简单的递推公式计算cholesky因子。如下:
凸优化理论与应用-暑期学习总结
“凸优化理论与应用”暑期学校学习总结 一、专家介绍 Stephen Boyd:斯坦福大学教授,曾多次来哈尔滨工业大学控制理论与制导技术研究中心开展学术讲座和交流活动。讲课全部是英文,很开朗。 段广仁:哈尔滨工业大学教授,曾于外国留学,讲了一口流利的英语,和Stephen Boyd教授交流时全部是英语。 谭峰:段广仁的学生,曾去Stephen Boyd教授那里做一年博后,然后回国,现在就职于哈尔滨工业大学,讲师。所以此次由她给大家做辅导。 二、课程安排 7.13上午8:15-9:15 开幕。段广仁老师对于本次暑期学校开展、Stephen Boyd、 谭峰以及幕后的工作人员做了简单的介绍,谈了课程的变 动的原因以及可能给我们加课等事宜。 9:30-11:00讲座1(Lecture 1) Stephen Boyd 教授。 7.14上午8:15-9:15 谭峰博士对于前一天Stephen Boyd 教授讲的知识的一个 回顾。 9:30-11:00讲座2(Lecture 2) Stephen Boyd 教授。 下午14:00-15:00讲座3(Lecture 3)Stephen Boyd 教授。 7.15上午8:15-9:15 谭峰博士。 9:30-11:00讲座4(Lecture 4) Stephen Boyd 教授。 7.16上午8:15-9:15 谭峰博士。 9:15-9:30 所有人一起拍一张照片。 9:30-11:00讲座5(Lecture 5) Stephen Boyd 教授。 三、主要知识 1.凸优化相应理论. 本部分一共有8章,老师只用了两节课共3个小时就讲完了。这部分的内容虽然我很认真的听了,也只能知道一点概况,说实话想学明白还需要以后投入大量的时间精力。 1.1 绪论 此部分介绍了在现实生活中存在的凸优化问题,最小二乘,线性规划,凸优化问题等。 1.2. 凸集 在此部分介绍了凸集里包含的集合的形式,如仿射集、凸集、凸锥、超平面
第四章 非线性规划约束极值问题
第四章 非线性规划 ?? ?? ???? 无约束最优化问题线性规划约束最优化问题非线性规划 ?? ?凸规划约束最优化问题非凸规划 ?? ?直接解法约束最优化问题求解方法间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于这类方法可以选用有效的无约束优化方法,且易于处理同时具有不等式约束和等式约束的问题,因而在工程优化中得到了广泛的应用。 直接解法是在满足不等式约束的可行设汁区域内直接按索问题的约束最优解。 第一节 目标函数的约束极值问题 所谓约束优化设计问题的最优性条件.就是指在满足等式和不等式约束条件下,其目标函数值最小的点必须满足的条件,须注意的是,这只是对约束的局部最优解而言。 对于带有约束条件的目标函数,其求最优解的过程可归结为: 一、约束与方向的定义 一)起作用约束与松弛约束 对于一个不等式约束()0g X ≤来说,如果所讨论的设计点() k X 使该约束()0g X =(或 者说() k X 当时正处在该约束的边界上)时,则称这个约束是() k X 点的一个起作用约束或紧约 束,而其他满足()0g X <的约束称为松弛约束。
冗余约束 4 0g ≤ 当一个设计点同时有几个约束起作用时,即可定义起作用约束集合为 {}()()()|()0,1,2, ,k k u I X u g X u m === 其意义是对() k X 点此时所有起作用约束下标的集合。 二)冗余约束 如果一个不等式约束条件的约束面(即()0g X =)对可行域的大小不发生影 响,或是约束面不与可行域D 相交,即此约束称为冗余约束。 三)可行方向 可行方向:一个设计点()k X 在可行域内,沿某一个方向S 移动,仍可得到一个属于可行域的新点,则称该方向为可行方向。 1)设计点为自由点 设计点() k X 在可行域内是一个自由点,在各个方 向上都可以作出移动得到新点仍属于可行域,如图所示。 2)设计点为约束边界点 当设计点()k X 处于起作用约束i g 上时,它的移动就会受到可行性的限制。此时,()k X 点的可行方向S 必满足条件: ()0T k i S g X ?≤ (解释:()()cos ,()T k k T k i i i S g X S g X S g X ?=??,,()90T k i S g X ?≥?)) 当,()90T k i S g X ?=?时,方向S 是约束函数i g 在()k X 点处的切线方向,即()0T k i S g X ?=。 当某个设计点x 同时有几个约束起作用时(如
凸优化理论
第一章凸集 1、仿射集 1.1、定义:任意以及都有; 直观上,如果两点在仿射集内,那么通过任意两点的直线位于其内; 1.2、仿射集的关联子空间: 如果是仿射集,且,则集合是一个子空间(关于加法和数乘封闭),因此仿射集可以表示为一个子空间加上一个偏移,,可以是C中任意一点;定义C的维数为子空间V的维数(向量基的个数); 1.3、线性方程组的解集: 等价于仿射集且其关联的子空间是就是的的零空间即; 1.4、仿射组合: 如果,称为的仿射组合; 如果是仿射集,,且,那么; 集合C是仿射集集合包含其中任意点的仿射组合; 1.5、仿射包: 集合C中的点的所有仿射组合组成的集合记为C的仿射包 ,;仿射包是包含的最小的仿射集合; 1.6、仿射维数: 集合仿射维数为其仿射包维数, 即仿射包相关联子空间的维数,即是其子空间最大线性无关基; 如果集合的仿射维数小于n ,那么这个集合在仿射集合中; 1.7、集合相对内部: 定义为的内部,记为,即; 集合内部:由其内点构成,内点为; 1.8、集合的相对边界: 集合C的相对边界定义为,为C的闭包; 集合C的边界定义为; ------------------------------------------------------------------------------------------------------------------------------ 2.凸集: 如果,,,都有; 直观上,如果两点在凸集内,则两点间的线段也在凸集内;仿射集是凸集; 2.1、凸组合: 如果,,,称为的凸组合; 点的凸组合可以看做他们的混合或加权平均,代表混合时所占的份数。 如果点在凸集内,则它们的凸组合仍在凸集内; C是凸集集合包含其中所有点的凸组合; 2.2、集合的凸包: 集合C中所有点的凸组合,; C的凸包是包含C的最小凸集; 2.3、无穷级数的凸组合: 假设,,,并且,,、、,为凸集,
MATLAB非线性优化fmincon
精心整理 active-set and sqp algorithms不接受用户提供的海塞矩阵,对拉格朗日的海塞矩阵提供一个拟牛顿的近似值; 目标函数估值次数与迭代次数? 优化成功或失败 1、 (1 数( (2 如果 就会导致无限次徒劳的迭代。DiffMaxChange和DiffMinChange选项能影响求解器的改善,它们控制求导估计中有限差分的步长。 (3)从不同的初始点重新开始求解 (4)检查目标函数和约束函数的定义
举个例子,可以检查目标函数和非线性约束函数在某些特定点处返回正确的值。不可行的点不一定导致函数的错误。 (5)对问题进行中心化和标准化 当每个坐标轴对目标函数和约束函数有相同的影响时,求解器更能可靠的运行,对每个坐标轴方向乘以合适的量使得每个坐标轴的影响相同,在特定的坐标轴 (6 (7 2 在可 (1 通过求解一个线性规划问题来找到一个满足界约束和线性约束的点。 i)定义一个目标函数是常值0的线性规划问题 f=zeros(size(x0));%assumesx0istheinitialpoint ii)求解这个线性规划问题看是否有一个可行点 xnew=linprog(f,A,b,Aeq,beq,lb,ub);
iii)如果有可行点xnew,用xnew作为初始点去求解原始问题 iv)如果没有可行点,那说明原始模型建的不好,检查界约束和线性约束。(2)检查非线性约束 在保证界约束和线性约束是可行的之后,检查非线性约束: i)设置目标函数为0,然后求解优化问题,如果能找到一个可行点xnew,令 ii) a. 足。 b. 3 (1)原问题可能确实无界,即存在一系列满足问题约束的点xi,使得limf(xi)=–∞。 (2)检查原问题建模正确,求解器是最小化目标函数,如果想得到最大化,将目标函数乘以-1. (3)试着标准化或中心化原问题。
最优化理论与方法
内点法基本原理 摘要:内点法是求解含不等式约束最优化问题的一种十分有效的算法。内点法通过构造障碍函数,求解一系列只含等式约束最优化问题,逐步得到原问题的最优解,具有找初始点容易、线性收敛、迭代次数少等特点。本文主要介绍了内点法的基本原理,障碍方法的一般步骤并分析了该方法的优缺点,进行了算例实践。 关键词:内点法;障碍方法;Newton法 The Theory of Interior Point Method Abstract: Interior point method is a very effective algorithm for solving optimization problems with inequality constrained. Interior point method is constructed to solve a series of optimization problems with equality constraints, and the optimal solution of the original problem is obtained, which has the characteristics of finding the initial point easier, linear convergence, less iteration number and so on. This paper mainly introduces the theory of interior point method, the general steps of barrier method and analyzing the advantages and disadvantages of the method. Key words: interior point method; barrier method;Newton method
关于非线性约束最优化方法-乘子法
非线性约束最优化方法 ——乘子法 1.1 研究背景 最优化理论与方法是一门应用性相当广泛的学科,它的最优性主要表现在讨论决策问题的最佳选择性,讨论计算方法的理论性质,构造寻求最佳解的计算方法,以及实际计算能力。伴随着计算数学理论的发展、优化计算方法的进步以及计算机性能的迅速提高,规模越来越大的优化问题得到解决。因为最优化问题广泛见于经济计划、工程设计、生产管理、交通运输、国防等重要领域,它已受到政府部门、科研机构和产业部门的高度重视。然而,随着人们对模型精度和最优性的要求所得到的优化命题往往具有方程数多、变量维数高、非线性性强等特点,使得相关变量的存储、计算及命题的求解都相当困难,从而导致大规模非线性优化很难实现。因此,寻求高效、可靠的大规模非线性优化算法成为近年来研究的热点。 本文讨论的问题属于非线性约束规划的范畴,讨论了其中的非线性等式约束最优化问题方面的一些问题。 1.2非线性约束规划问题的研究方法 非线性约束规划问题的一般形式为 (NPL ) {}{} m in (),, s.t. ()0,1,2,...,, ()0,1,2,...,n i i f x x R c x i E l c x i I l l l m ∈=∈=≤∈=+++ 其中,(),()i f x c x 是连续可微的. 在求解线性约束优化问题时,可以利用约束问题本身的性质,
但是对于非线性约束规划问题,由于约束的非线性使得求解这类问题比较复杂、困难。因此,我们将约束问题转化为一系列无约束优化问题,通过求解一系列无约束优化问题,来得到约束优化问题的最优解。我们用到的几类主要的方法有:罚函数法、乘子法以及变尺度法。 传统上我们所提出的非线性约束最优化方法一般都遵循下列三个基本思路之一 1 借助反复的线性逼近把线性方法扩展到非线性优化问题中来 2 采用罚函数把约束非线性问题变换到一系列无约束问题 3 采用可变容差法以便同时容纳可行的和不可行的X 矢量 其中源于思路2 的乘子罚函数法具有适合于等式及不等式约束不要求初始点为严格内点,甚至不要求其为可行点对自由度的大小无任何要求等特点。 1.3乘子法 罚函数法的主要缺点在于需要惩罚因子趋于无穷大,才能得到约束问题的极小点,这会使罚函数的Hesse矩阵变得病态,给无约束问题的数值求解带来很大问题,为克服这一缺点,Hestenes和Powell 于1964年各自独立地提出乘子法。所谓乘子法是:由问题的Lagrange 函数出发,考虑它的精确惩罚,从而将约束优化问题化为单个函数的无约束优化问题,它同精确罚函数法一样,具有较好的收敛速度和数值稳定性,且避免了寻求精确罚函数法中关于罚参数阈值的困难,它们一直是求解约束优化问题的主要而有效的算法。 考虑如下非线性等式约束优化问题:
MA AB非线性优化fmincon
active-set and sqp algorithms不接受用户提供的海塞矩阵,对拉格朗日的海塞矩阵提供一个拟牛顿的近似值;目标函数估值次数与迭代次数? 优化成功或失败 一、求解失败 1、在到达迭代次数阈值或目标函数估值次数阈值时,求解器没有最小化目标到要求的精度,此时求解器停止。接下来,可以尝试以下方法: (1)设置‘Display’为‘iter’,查看每步的迭代信息,这些信息包括:目标函数(Fvalorf(x)orResnorm)是否是下降的;检查约束越界(Maxconstraint)是否是递减趋向于0;查看一阶优化是否是递减趋向于0;查看置信域半径(Trust-regionradius)是否下降趋向于一个小的值。若其中至少一种情况为是,就表示结果是不断改善的。如果结果是不断改善的,可以采取下边的措施:设置MaxIter、MaxFunEvals比默认值大的值,默认值可以在优化工具箱或求解器的函数参考页的优化表中查看;从最后计算出的点开始重新求解。如果结果没有改善,尝试以下其他的方法。(2)放松精度 如果TolX或TolFun太小,当求解器达到一个最小值时可能也不会识别到,这就会导致无限次徒劳的迭代。DiffMaxChange和DiffMinChange选项能影响求解器的改善,它们控制求导估计中有限差分的步长。
(3)从不同的初始点重新开始求解 (4)检查目标函数和约束函数的定义 举个例子,可以检查目标函数和非线性约束函数在某些特定点处返回正确的值。不可行的点不一定导致函数的错误。 (5)对问题进行中心化和标准化 当每个坐标轴对目标函数和约束函数有相同的影响时,求解器更能可靠的运行,对每个坐标轴方向乘以合适的量使得每个坐标轴的影响相同,在特定的坐标轴上加上合适的值使得它们长度一致。 (6)提供解析的梯度和雅可比矩阵 如果用户不提供解析的梯度或雅可比矩阵,求解器会用有限差分来估计这些值,因此提供这些导数可以减少运算时间,提高计算准确度。 对于约束问题,提供梯度还有另一个好处----求解器到达一个点x 时能满足该点是可行的,但有限差分在x点周围可能会导致不可行的点,在这种情况下,求解器可能会失败或突然中断。(7)提供海塞矩阵 当提供海塞矩阵时,求解器能运行的更可靠,而且运行的次数比较少。 2、无可行点 在TolCon约束精度内,求解器不能找到一个满足所有约束条件的点,此时,可以尝试以下方法:
“凸优化”教学大纲
“凸优化”教学大纲 ?基本目的: 近年来,随着科学与工程的进步,凸优化理论与方法的研究迅猛发展,在科学与工程计算,数据科学,信号和图像处理,管理科学等诸多领域中得到了广泛应用。通过本课程的学习,掌握凸优化的基本概念,对偶理论,典型的几类凸优化问题的判别及其计算方法,熟悉相关计算软件 ?课程对象: 高年级本科生和研究生。 ?教材: (1)Stephen Boyd and Lieven Vandenberghe, Convex optimization, Cambridge University Press, 2004 参考书 (2)Jorge Nocedal and Stephen Wright, Numerical Optimization, Springer, 2006 (3)袁亚湘,孙文瑜,最优化理论与方法,科学出版社,2003 ?内容提要和学时分配: 1. 凸优化简介, 3学时 课程简介,凸优化问题介绍 2. 凸集,凸函数, 3学时 凸集和凸函数的定义和判别 3. 数值代数基础, 3学时 向量,矩阵,范数,子空间,Cholesky分解,QR分解,特征值分解,奇异值分解 4. 凸优化问题, 6学时 典型的凸优化问题,线性规划和半定规划问题 5. 凸优化模型语言和算法软件,3学时 模型语言:AMPL, CVX, YALMIP; 典型算法软件: SDPT3, Mosek, CPLEX, Gruobi 6. 对偶理论, 3学时 对偶问题的转换和对偶理论 7. 梯度法和线搜索算法,3学时 最速下降法及其复杂度分析,线搜索算法,Barzilar-Borwein 方法 8. 近似点梯度法, 3学时
凸优化(08.27)
凸优化总结 1基本概念 1.1) 凸集合:n S R ?是凸集,如果其满足:x; y S + = 1 x + y S λμλμ∈?∈ 几何解释:x; y S ∈,则线段[x,y]上的任何点都S ∈ 1.2) 仿 射 集 : n S R ?是仿射集,如果其满足:x; y S , R ,+ = 1 x + y S λμλμλμ∈∈?∈ 几何解释:x; y S ∈,则穿过x, y 的直线上的任何点都S ∈ 1.3) 子空间:n S R ?是子空间,如果其满足:x; y S , R , x + y S λμλμ∈∈?∈ 几何解释:x; y S ∈,则穿过x, y ,0的平面上的任何点都S ∈ 1.4) 凸锥:n S R ?是凸锥,如果其满足:x; y S ,0 x + y S λμλμ∈≥?∈ 几何解释:x; y S ∈,则x, y 之间的扇形面的任何点都S ? 集合C 是凸锥的充分必要条件是集合C 中的元素的非负线性组合仍在C 中,作为一般化结 果,其中非负线性组合的数目可以推广到无穷 1.5) 超平面:满足{ } T x a x = b (a 0)≠的仿射集,如果b=0则变为子空间
1.6) 半空间:满足{ } T x a x b (a 0)≤≠的凸集,如果b=0则变为凸锥 1.7) 椭球体:{ } T -1 c c =x (x-x )A (x-x ) 1 ξ≤T n c A = A 0; x R ∈ 球心 1.8) 范数:f :R n —R 是一种范数,如果对所有的n x; y R , t R ∈∈满足 1. f(x) 0; f(x) = 0 x = 0 2. f(tx) = tf(x) 3. f(x + y) f(x) + f(y) ≥?≤ 范数分类 ● 1范数 2 x = ● 2范数 1i x x x =∑ ● 3无穷范数 max i i x x ∞ = 1.9) 有效域:集合(){()}dom f x X f x =∈<∞ 1.10) 水平集:{()}{()}x X f x and x X f x αα∈<∈≤,其中α为一标量 1.11) 上镜图:函数:(,f x ∈-∞∞的上镜图由下面的集合给定 {}()(,),,()epi f x w x X w R f x w =∈∈<给出的1n R +给出的子集。 1.12) 多面体:有限数目半空间集合的交集{ }{ } T i i x a x b ,1,...=x Ax b P i k =≤= 1.13) 共轭函数:f :R n —R 上的共轭函数定义为:*()sup (())T x domf f y y x f x ∈=-,* f 是凸 函数即使f 不是 1.14) Jensen 不等式: f :R n —R 上的凸函数 ● 两点12112211221,0()()()i f x x f x f x θθθθθθθ+=≥?+≤+ ● 多点 11,0()()i i i i i i i i f x f x θ θθθ=≥?≤∑∑∑ ● 连续()0,()1(())()()p x p x dx f xp x dx f x p x dx ≥=?≤ ???
优质课程《凸优化及其在信号处理中的应用》课程教学大纲
附件 课程教学大纲 课程编号:G00TE1204 课程名称:凸优化及其在信号处理中的应用 课程英文名称:Convex Optimization and Its Applications in Signal Processing 开课单位:通信工程学院 教学大纲撰写人:苏文藻 课程学分:2学分 课内学时:32学时 课程类别:硕士/博士/专业学位 课程性质:任选 授课方式:讲课 考核方式:作业,考试 适用专业:通信与信息系统、信号与信息处理 先修课程: 教学目标: 同学应: 1.掌握建立基本优化模型技巧 2.掌握基本凸分析理论 3.掌握凸优化问题的最优条件及对偶理论 4.认识凸优化在信号处理的一些应用
英文简介: In this course we will develop the basic machineries for formulating and analyzing various optimization problems. Topics include convex analysis, linear and conic linear programming, nonlinear programming, optimality conditions, Lagrangian duality theory, and basics of optimization algorithms. Applications from signal processing will be used to complement the theoretical developments. No prior optimization background is required for this class. However, students should have workable knowledge in multivariable calculus, real analysis, linear algebra and matrix theory. 课程主要内容: Part I: Introduction -Problem formulation -Classes of optimization problems Part II: Theory -Basics of convex analysis -Conic linear programming and nonlinear programming: Optimality conditions and duality theory -Basics of combinatorial optimization Part III: Selected Applications in Signal Processing -Transmit beamforming -Network localization -Sparse/Low-Rank Regression 参考书目: 1.Ben-Tal, Nemirovski: Optimization I-II: Convex Analysis, Nonlinear Programming Theory, Nonlinear Programming Algorithms, 2004. 2.Boyd, Vandenberghe: Convex Optimization, Cambridge University Press, 2004. 3.Luenberger, Ye: Linear and Nonlinear Programming (3rd Edition), 2008. 4.Nemirovski: Lectures on Modern Convex Optimization, 200 5.