信号与系统习题集 (2)

信号与系统练习题集
第一部分:信号与系统的时域分析
一、填空题 1. =---)3()()
2(t t u e
t δ ( ).
2. The unit step response )(t g is the zero-state response when the input signal is ( ).
3. Given two continuous – time signals x(t) and h(t), if their convolution is denoted by y(t), then the convolution of )1(-t x and )1(+t h is ( ).
4. The convolution =+-)(*)(21t t t t x δ( ).
5. The unit impulse response )(t h is the zero-state response when the input signal is ( ).
6. A continuous – time LTI system is stable if its unit impulse response satisfies the condition: ( ) .
7. A continuous – time LTI system can be completely determined by its ( ).
8. =?∞∞-(t)dt 2sin 2 δt t ( ).
9. Given two sequences }1,2,2,1{][=n x and }5,6,3{][=n h , their convolution =][*][n h n x ( ).
10. Given three LTI systems S1, S2 and S3, their unit impulse responses are )(1t h , )(2t h and
)(3t h respectively. Now, construct an LTI system S using these three systems: S1 parallel
interconnected by S2, then series interconnected by S3. the unit impulse response of the system S is ( ).
11. It is known that the zero-stat response of a system to the input signal x(t) is ?∞-=t
d x t y ττ)()(,
then the unit impulse response h(t) is ( ).
12. The complete response of an LTI system can be expressed as a sum of its zero-state response and its ( ) response.
13. It is known that the unit step response of an LTI system is )(2t u e
t
-, then the unit impulse response h(t)
is ( ).
14. =++-=?∞
dt t t t t x ))1()1((2
sin )(0δδπ
( ).
15. We can build a continuous-time LTI system using the following three basic operations:
( ) , ( ), and ( ). 16. The zero-state response of an LTI system to the input signal )1()()(--=t u t u t x is
)1()(--t s t s , where s(t) is the unit step response of the system, then the unit impulse response
is h(t) = ( ).
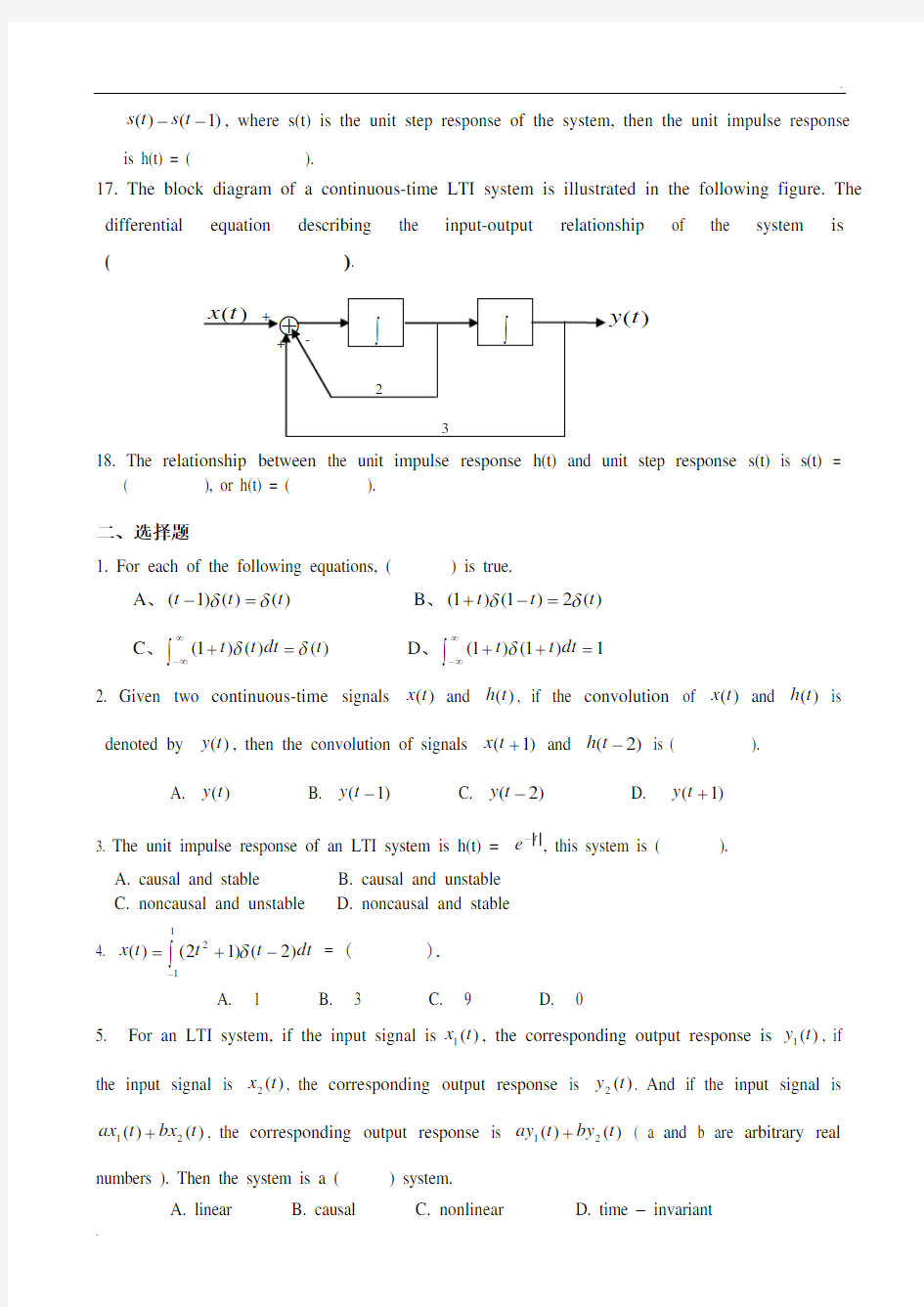
17. The block diagram of a continuous-time LTI system is illustrated in the following figure. The differential
equation
describing
the input-output relationship
of the system
is
( ).
18. The relationship between the unit impulse response h(t) and unit step response s(t) is s(t) =
( ), or h(t) = ( ).
二、选择题
1. For each of the following equations, ( ) is true.
A 、)()()1(t t t δδ=-
B 、)(2)1()1(t t t δδ=-+
C 、?
∞∞
-=+)()()1(t dt t t δδ D 、?∞
∞
-=++1)1()1(dt t t δ
2. Given two continuous-time signals )(t x and )(t h , if the convolution of )(t x and )(t h is denoted by )(t y , then the convolution of signals )1(+t x and )2(-t h is ( ).
A. )(t y
B. )1(-t y
C. )2(-t y
D. )1(+t y
3. The unit impulse response of an LTI system is h(t) = t
e
-, this system is ( ).
A. causal and stable
B. causal and unstable
C. noncausal and unstable
D. noncausal and stable
4. dt t t t x )2()12()(1
1
2-+=?
-δ = ( ).
A. 1
B. 3
C. 9
D. 0
5. For an LTI system, if the input signal is )(1t x , the corresponding output response is )(1t y , if the input signal is )(2t x , the corresponding output response is )(2t y . And if the input signal is
)()(21t bx t ax +, the corresponding output response is )()(21t by t ay + ( a and b are arbitrary real
numbers ). Then the system is a ( ) system.
A. linear
B. causal
C. nonlinear
D. time – invariant
)(t
6. )(*)(21t t t t x --δ = ( ).
A. )(21t t t x --
B. )(21t t t x +-
C. )(21t t t x -+
D. )(21t t t ++δ
7. =???
?
?-+=?∞
∞
-dt t t t t x 6)sin ()(πδ ( ). A.
6π B.16
-π
C. 216-π
D. 216+π
8. Given two sequences ][1n x and ][2n x , their lengths are M and N respectively. The length of the
convolution of ][1n x and ][2n x is ( ).
A .M
B .N
C .N M +
D .1-+N M
9. The unit impulse response of a continuous-time LTI system is dt
t d t t h )
()(2)(δδ+
=, the differential equation describing the input-output relation of this system is ( ).
A.)()()(2t x dt t dy t y =+
B. )()
(2)(t x dt
t dy t y =+
C. dt t dx t x t y )()(2)(+=
D. dt
t dx t x dt t dy )
(2
)()(+= 10. The input-output relation of a continuous-time LTI system is described by the differential
equation: dt t dx t x t y dt t dy dt
t y d )()(2)(3)(2)(2
2+=++. The unit impulse response of the system h(t) ( ).
A . does not include )(t δ B. includes )(t δ C. includes
dt
t d )
(δ D. is uncertain 11. Signals )(1t x and )(2t x are shown in the following figures. The expression of the convolution )(*)()(21t x t x t x = is ( ).
A. )1()1(--+t u t u
B. )2()2(--+t u t u
-1
1
(1)
(1)
)(2t x
C. )1()1(+--t u t u
D. )2()2(+--t u t u 12. The following block diagram represents a continuous-time LTI system. The unit impulse response h(t) satisfies ( ).
A. )()()(t x t y dt
t dy =+
B. )()()(t y t x t h -=
C.
)()()
(t t h dt
t dh δ=+ D. )()()(t y t t h -=δ
13. The input-output relationship of a causal continuous-time system is described by the differential equation:
dt
t dx t y dt t dy )
(2
)(3)(=+, then the unit step response =)(t s ( ). A. )(23t u e t - B. )(213t u e t - C. )(23t u e t D. )(2
1
3t u e t
三、综合题(分析、计算题)
1. The input-output relationship of a continuous-time LTI system is described by the equation:
τττd x e t y t
t )2()()(-=?∞---,
a. Determine the unit impulse response h(t) of the system.
b. Determine the system response y(t) to the input signal )2()1()(--+=t u t u t x .
2. Given an LTI system depicted in Figure 2. Assume that the impulse response of the LTI system is h(t) = e -t u(t), the input signal x(t) = u(t) - u(t-2). Determine and sketch the output response y(t) of the system by evaluating the convolution y(t) = x(t)*h(t).
3. Remember the following identities:
)(*)()(t t x t x δ= )(*)()(00t t t x t t x -=-δ
)()(*)(00t t t t t δδδ=-+
dt
t dh t x t h dt t dx dt t dy )
(*)()(*)()(== 4. Consider an LTI system S and a signal )1(2)(3-=-t u e t x t . If
)()(t y t x →
Figure 2
⊕
)
(t x )t
+
and
)()(3)
(2t u e t y dt
t dx t -+-→, determine the impulse response h(t) of S.
5. Let )5()3()(---=t u t u t x and )()(3t u e t h t -=, as illustrated in the Figure
6.
(a). Compute y(t) = x(t)*h(t).
(b). Compute g(t) = dx(t)/dt * h(t).
(c). How is g(t) related to y(t)?
6. Let ∑∞
-∞
=--=k t
k t t u e t y )3(*
)()(δ
Show that t Ae t y -=)( for 0 ≤ t < 3, and determine the value A. 7. A causal LTI system is described by the differential equation:
)()
()(2)(3)(2
2t x dt
t dx t y dt t dy dt t y d +=++ If the input signal is )()(2t u e t x t -=, determine the zero-state response y(t) of the system.
8. In this problem, we illustrate one of the most important consequences of the properties of linearity and time invariance. Specifically, once we know the response of a linear system or a linear time-invariant system to a single input or responses to several inputs, we can directly compute the responses to many other input signals.
(a). Consider an LTI system whose response to the signal x 1(t) in Figure 9(a) is the signal y 1(t) illustrated in Figure 9(b). Determine and sketch carefully the response of the system to the input x 2(t) depicted in Figure 9(c).
(b). Determine and sketch the response of the system considered in part (a) to the input x 3(t) shown in Figure 9(d).
)
(t x t
5
)
(t h t
Figure 6
1
3
1
t
t
第二部分:信号与系统的频域分析
一、填空题
1. The frequency response of an ideal filter is given by ????
?<≥=π
ωπωω100,
0100,
2)(j H , if the input
signal is )120cos(5)80cos(10)(t t t x ππ+=, the corresponding output response y(t) = ( ).
2. The Fourier transform of signal )cos()(0t t x ω= is ( ).
3. The Fourier transform of signal )6
sin()(0π
ω+
=t t x is ( ).
4. Assume that the Fourier transform of )(t x is denoted as )(ωj X , then the Fourier transform of
)()(0t x e t y t j ω= is )(ωj Y = ( ).
5. The Fourier transform of a continuous – time periodic signal ∑∞
-∞
==k t
jk k
e
a t x 0)(ω is )(ωj X =
( ).
6. It is known that the Fourier transform of )(t x is 1
1
)(+=
ωωj j X , then the Fourier transform of )(t tx is ( ).
7. The Fourier transform of signal )(t x is denoted as )(ωj X , the Fourier transform of )()1(t x t - is ( ).
8. A time shifting leads to a ( ).
9. The frequency responses of two LTI systems are assumed to be 1()H j ω and 2()H j ω, the frequency response of the interconnection of 1()H j ω cascaded by 2()H j ω is ()H j ω = ( ).
10. A time-domain compression corresponds to a frequency-domain ( ). 11. For a signal x(t), if the condition
?
∞
∞
-∞
exists, this condition is ( ) but not ( ).
信号与系统 模拟题
硕士研究生入学考试模拟试题(一) 考试科目:信号与系统 一、1对二、 三、)k。 四、已知某离散系统的差分方程为 e k - + +k k y + y k y )2 ( ) ( )1 )1 ( 2+ ( 3 =
其初始状态为6)2(,2)1(-=--=-zi zi y y ,激励)()(k k e ε=; 求: 1) 零输入响应)(k y zi 、零状态响应)(k y zs 及全响应)(k y ; 2) 指出其中的自由响应分量和受迫响应分量; 3) 1) 2)3) 六. 一个输入为)(k f 、输出为)(k y 的离散时间LTI 系统,已知 (a)若对全部k ,k k f )2()(-=,则对全部k ,有)(k y =0; (b) 若对全部k ,)()2()(k k f k ε-=,有 )()4()()(k a k k y k εδ-+=,其中a 为常数。
求(1)常数a ;(2)若系统输入对全部k ,有1)(=k f ,求响应)(k y 七.某线性时不变离散系统,其输入与输出由差分方程描述: (1) 若y(-1)=2,求系统的零输入响应y zi (n)。 (2) 若x(n)=(1/4)n u(n),求系统的零状态响应y zs (n)。 八 、知RLC 串联电路如图所示,其中 ,,,,A l F C H L R L 1)0(2.012===Ω=- ; 输入信号 ) ()(2)1(n x n y n y =+ -
试画出该系统的复频域模型图并计算出电流。 硕士研究生入学考试模拟试题(二) 考试科目:信号与系统 注意事项:1.本卷属试题卷,答题另有答题卷,答案一律写在答题卷上,写在该试题卷上或草纸上均无效。要注意试卷清洁,不要在试卷上涂划; 2.必须用蓝、黑钢笔或签字笔答题,其它均无效。 一、求图1所示梯形信号f(t)的频谱函数。
信号与系统第二次作业
《信号与系统》课程研究性学习手册 姓名_______ nicai ___________________________ 学号_______________________________________ 同组成员___________________________________ 指导教师____________________________________ 时间________________________________________ 信号的频域分析专题研讨 【目的】 (1) 建立工程应用中有效带宽的概念,了解有限次谐波合成信号及吉伯斯现象。 (2) 掌握带限信号,带通信号、未知信号等不同特性的连续时间信号的抽样,以及抽样过程中的参数选择与确定。认识混叠误差,以及减小混叠误差的措施。 (3) 加深对信号频域分析基本原理和方法的理解。 (4) 锻炼学生综合利用所学理论和技术,分析与解决实际问题的能力。 【研讨内容】一一基础题题目1吉伯斯现象 2 N 2 (1) 以(C0| +2瓦n』C n )/P^0.90定义信号的有效带宽,试确定下图所示信号的有效带宽 NCO。, 取A=1,T=2。 (2) 画出有效带宽内有限项谐波合成的近似波形,并对结果加以讨论和比较。 (3) 增加谐波的项数,观察其合成的近似波形,并对结果加以讨论和比较。 (a)周期矩形信号(b)周期三角波信号 【知识点】 连续周期信号的频域分析,有效带宽,吉伯斯现象 【信号频谱及有效带宽计算】图示矩形波占空比为50% (A/2)P T0/2[t-(kT0/2-T0/4)](-1) k-1—(A/2)(T0/2)Sa(wT0/4)e -jw(kT0/2-T0/4)(-l)k-1 可以发现频域项前面是一个周期函数,我们定量研究后面的指数衰减项就可以了; C0=1/4 厲/n n n=1,3,5,7,9 Cn= J 0 n=2,4,6,8 %输出周期矩形波 T=-10@.01:10; A=0.5; P=1; y=A*square(P.*T); >> plot(y) %求频谱>>X=fft(x); 【仿真程序】 (1) t=-5:0.001:5; y=0.6366.*sin(pi*t)+0.2133.*sin(3*pi*t);
信号与系统期末考试试题(有答案的)
信号与系统期末考试试题 一、选择题(共10题,每题3分 ,共30分,每题给出四个答案,其中只有一个正确的) 1、 卷积f 1(k+5)*f 2(k-3) 等于 。 (A )f 1(k)*f 2(k) (B )f 1(k)*f 2(k-8)(C )f 1(k)*f 2(k+8)(D )f 1(k+3)*f 2(k-3) 2、 积分 dt t t ? ∞ ∞ --+)21()2(δ等于 。 (A )1.25(B )2.5(C )3(D )5 3、 序列f(k)=-u(-k)的z 变换等于 。 (A ) 1-z z (B )-1-z z (C )11-z (D )1 1--z 4、 若y(t)=f(t)*h(t),则f(2t)*h(2t)等于 。 (A ) )2(41t y (B ))2(21t y (C ))4(41t y (D ))4(2 1 t y 5、 已知一个线性时不变系统的阶跃相应g(t)=2e -2t u(t)+)(t δ,当输入f(t)=3e —t u(t)时,系 统的零状态响应y f (t)等于 (A )(-9e -t +12e -2t )u(t) (B )(3-9e -t +12e -2t )u(t) (C ))(t δ+(-6e -t +8e -2t )u(t) (D )3)(t δ +(-9e -t +12e -2t )u(t) 6、 连续周期信号的频谱具有 (A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性 7、 周期序列2)455.1(0 +k COS π的 周期N 等于 (A ) 1(B )2(C )3(D )4 8、序列和 ()∑∞ -∞ =-k k 1δ等于 (A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku 9、单边拉普拉斯变换()s e s s s F 22 12-+= 的愿函数等于 ()()t tu A ()()2-t tu B ()()()t u t C 2- ()()()22--t u t D 10、信号()()23-=-t u te t f t 的单边拉氏变换()s F 等于 ()A ()()()232372+++-s e s s ()() 2 23+-s e B s
信号与系统实验三
信号与系统实验实验三:信号的卷积 小组成员: 黄涛13084220 胡焰焰13084219 洪燕东13084217
一、实验目的 1. 理解卷积的物理意义; 2. 掌握运用计算机进行卷积运算的原理和方法; 3. 熟悉卷积运算函数conv的应用; 二、预习内容 1. 卷积的定义及物理意义; 2. 卷积计算的图解法; 3. 卷积的应用 三、实验原理说明 1.卷积的定义 连续时间和离散时间卷积的定义分别如下所示: 2.卷积的计算 由于计算机技术的发展,通过编程的方法来计算卷积积分和卷积和已经不再是冗繁的工作,并可以获得足够的精度,因此信号的时域卷积分析法在系统分析中得到了广泛的应用。 卷积积分的数值运算可以应用信号的分段求和来实现,即: 数值运算只求当时的信号值,则由上式可以得到: 上式中实际上就是连续信号等间隔均匀抽样的离散序列的卷积和,当足够小的时候就是信号卷积积分的数值近似。因此,在利用计算机计算两信号卷积积分时,实质上是先将其转化为离散序列,再利用离散卷积和计算原理来计算。 3.卷积的应用 3.1 求解系统响应 卷积是信号与系统时域分析的基本手段,主要应用于求解系统响应,已知一LTI系统的单位冲激响应和系统激励信号则系统响应为激励与单位冲激响应的卷积。 需要注意的是利用卷积分析方法求得的系统响应为零状态响应。 3.2 相关性分析 相关函数是描述两个信号相似程度的量。两信号之间的相关函数一般称之为互相关函数或者互关函数,定义如下: 若是同一信号,此时相关函数称为自相关函数或者自关函数: 对于相关函数与卷积运算有着密切的联系,由卷积公式与相关函数比较得: 可见,由第二个信号反转再与第一个信号卷积即得到两信号的相关函数。 4.涉及的Matlab函数 4.1 conv函数 格式w = conv(u,v),可以实现两个有限长输入序列u,v的卷积运算,得到有限冲激响应系统的输出序列。输出序列长度为两个输入序列长度和减一。 四、实验内容 给定如下因果线性时不变系统: y[n]+0.71y[n-1]-0.46y[n-2]-0.62y[n-3=0.9x[n]-0.45x[n-1]+0.35x[n-2]+0.002x[n-3] (1)不用impz函数,使用filter命令,求出以上系统的单位冲激响应h[n]的前20个样本; clc; N = 0:19;
信号与系统期末考试试题
期末试题一 、选择题(每小题可能有一个或几个正确答案,将正确得题号填入[ ]内) 1.f (5-2t )就是如下运算得结果————————( ) (A )f (-2t )右移5 (B )f (-2t )左移5 (C )f (-2t )右移 2 5 (D )f (-2t )左移25 2.已知)()(),()(21t u e t f t u t f at -==,可以求得=)(*)(21t f t f —————() (A )1-at e - (B )at e - (C ))1(1at e a -- (D )at e a -1 3.线性系统响应满足以下规律————————————( ) (A )若起始状态为零,则零输入响应为零。 (B )若起始状态为零,则零状态响应为零。 (C )若系统得零状态响应为零,则强迫响应也为零。 (D )若激励信号为零,零输入响应就就是自由响应。 4.若对f (t )进行理想取样,其奈奎斯特取样频率为f s ,则对)23 1 (-t f 进行取 样,其奈奎斯特取样频率为————————( ) (A )3f s (B ) s f 31 (C )3(f s -2) (D ))2(3 1 -s f 5.理想不失真传输系统得传输函数H (jω)就是 ————————( ) (A ) 0j t Ke ω- (B )0 t j Ke ω- (C )0 t j Ke ω-[]()()c c u u ωωωω+-- (D )00 j t Ke ω- (00,,,c t k ωω为常数) 6.已知Z 变换Z 1 311 )]([--= z n x ,收敛域3z >,则逆变换x (n )为——( ) (A ))(3n u n (C )3(1)n u n - (B ))(3n u n -- (D ))1(3----n u n 二.(15分) 已知f(t)与h(t)波形如下图所示,请计算卷积f(t)*h(t),并画出f(t)*h(t)波形。
信号与系统试题附答案
信科0801《信号与系统》复习参考练习题 参考答案 信号与系统综合复习资料 考试方式:闭卷 考试题型:1、简答题(5个小题),占30分;计算题(7个大题),占70分。 一、简答题: 1.dt t df t f x e t y t ) ()()0()(+=-其中x(0)是初始状态, 为全响应,为激励,)()(t y t f 试回答该系统是否是线性的?[答案:非线性] 2.)()(sin )('t f t ty t y =+试判断该微分方程表示的系统是线性的还是非线性的, 是时变的还是非时变的?[答案:线性时变的] 3.已知有限频带信号)(t f 的最高频率为100Hz ,若对)3(*)2(t f t f 进行时域取样, 求最小取样频率s f =?[答案:400s f Hz =] 4.简述无失真传输的理想条件。[答案:系统的幅频特性为一常数,而相频特性为通过原点的直线] 5.求[]?∞ ∞ --+dt t t e t )()('2δδ的值。[答案:3] 6.已知)()(ωj F t f ?,求信号)52(-t f 的傅立叶变换。 [答案:521(25)()22 j f t e F j ωω --?]
7.已知)(t f 的波形图如图所示,画出)2()2(t t f --ε的波形。 [答案: ] 8.已知线性时不变系统,当输入)()()(3t e e t x t t ε--+=时,其零状态响应为 )()22()(4t e e t y t t ε--+=,求系统的频率响应。[答案: ()) 4)(2(52)3(++++ωωωωj j j j ] 9.求象函数2 ) 1(3 2)(++= s s s F ,的初值)0(+f 和终值)(∞f 。 [答案:)0(+f =2,0)(=∞f ] 10.若LTI 离散系统的阶跃响应为)(k g ,求其单位序列响应。 其中:)()2 1 ()(k k g k ε=。 [答案:1111 ()()(1)()()()(1)()()(1)222 k k k h k g k g k k k k k εεδε-=--=--=--] 11.已知()1 1 , 0,1,20 , k f k else ==??? ,()2 1 , 0,1,2,3 0 , k k f k else -==??? 设()()()12f k f k f k =*,求()3?f =。[答案:3] 12.描述某离散系统的差分方程为()()()122()y k y k y k f k +---=
信号与系统实验指导书
实验一 常用信号分类与观察 一、实验目的 1、了解单片机产生低频信号源; 2、观察常用信号的波形特点及产生方法; 3、学会使用示波器对常用波形参数的测量。 二、实验内容 1、信号的种类相当的多,这里列出了几种典型的信号,便于观察。 2、这些信号可以应用到后面的“基本运算单元”和“无失真传输系统分析”中。 三、实验原理 对于一个系统特性的研究,其中重要的一个方面是研究它的输入输出关系,即在一特定的输入信号下,系统对应的输出响应信号。因而对信号的研究是对系统研究的出发点,是对系统特性观察的基本手段与方法。在本实验中,将对常用信号和特性进行分析、研究。 信号可以表示为一个或多个变量的函数,在这里仅对一维信号进行研究,自变量为时间。常用信号有:指数信号、正弦信号、指数衰减正弦信号、抽样信号、钟形信号、脉冲信号等。 1、正弦信号:其表达式为)sin()(θω+=t K t f ,其信号的参数:振幅K 、角频率ω、与初始相位θ。其波形如下图所示: 图 1-5-1 正弦信号 2、指数信号:指数信号可表示为at Ke t f =)(。对于不同的a 取值,其波形表现为不同的形式,如下图所示:
图 1-5-2 指数信号 3、指数衰减正弦信号:其表达式为 ?? ? ??><=-)0()sin()0(0)(t t Ke t t f at ω 其波形如下图: 图 1-5-3 指数衰减正弦信号 4、抽样信号:其表达式为: sin ()t Sa t t = 。)(t Sa 是一个偶函数,t = ±π,±2π,…,±n π时,函数值为零。该函数在很多应用场合具有独特的运用。其信号如下图所示:
信号与系统试题及答案
模拟试题一及答案 一、(共20分,每小题5分)计算题 1.应用冲激函数的性质,求表示式25()t t dt δ∞ -∞?的值。 2.一个线性时不变系统,在激励)(1t e 作用下的响应为)(1t r ,激励)(2t e 作用下的响应为)(2t r ,试求在激励1122()()D e t D e t +下系统的响应。 (假定起始时刻系统无储能)。 3.有一LTI 系统,当激励)()(1t u t x =时,响应)(6)(1t u e t y t α-=,试求当激励())(23)(2t t tu t x δ+=时,响应)(2t y 的表示式。(假定起始时刻系统无储能)。 4.试绘出时间函数)]1()([--t u t u t 的波形图。 二、(15分,第一问10分,第二问5分)已知某系统的系统函数为25 ()32 s H s s s +=++,试 求(1)判断该系统的稳定性。(2)该系统为无失真传输系统吗? 三、(10分)已知周期信号f (t )的波形如下图所示,求f (t )的傅里叶变换F (ω)。 四、(15分)已知系统如下图所示,当0 1)0('=-f 。试求: (1)系统零状态响应;(2)写出系统函数,并作系统函数的极零图;(3)判断该系统是否为全通系统。 六. (15分,每问5分)已知系统的系统函数()2 105 2+++=s s s s H ,试求:(1)画出直 接形式的系统流图;(2)系统的状态方程;(3)系统的输出方程。 一、(共20分,每小题5分)计算题 1.解:25()500t t dt δ∞ -∞=?=? 2.解: 系统的输出为1122()()D r t D r t + 3.解: ()()t t u t u t dt -∞?=?, ()()d t u t dx δ= ,该系统为LTI 系统。 故在()t u t ?激励下的响应126()6()(1)t t t y t e u t dt e ααα ---∞ =?=--? 在()t δ激励下的响应2 2 ()(6())6()6()t t d y t e u t e u t t dx αααδ--==-+ 在3()2()tu t t δ+激励下的响应1818 ()12()12()t t y t e e u t t αααδαα --=--+。 4 二、(10分)解:(1) 21255 ()32(2)(1)1,s s H s s s s s s s ++= = ++++∴=-=-2,位于复平面的左半平面 所以,系统稳定. (2) 由于6 ()(3)4) j H j j j ωωωω+= ≠+常数+(,不符合无失真传输的条件,所以该系统不能对 输入信号进行无失真传输。 三、(10分) 湖南理工学院成教期末考试试卷 课 程 名 称《信号与系统》 2010年度第 I 学期 题号 一 二 三 四 五 六 七 八 九 十 总 分 得分 1. 已知 f (t )的傅里叶变换为F (j ω), 则f (2t -3)的傅里叶变换为 。 2、 ()dt t e t 12-?+∞ ∞ --δ 。 3 =-?∞ ∞ -dt t t )()5cos 2(δ= 。 4. 已知 651 )(2+++=s s s s F ,则=+)0(f ; =∞)(f 。 5. 已知 ω ωπδεj t FT 1 )()]([+=,则=)]([t t FT ε 。 6. 已知周期信号 )4sin()2cos()(t t t f +=,其基波频率为 rad/s ; 周期为 s 。 7. 已知 )5(2)2(3)(-+-=n n k f δδ,其Z 变换 =)(Z F ;收敛域为 。 8. 已知连续系统函数1 342 3)(23+--+=s s s s s H ,试判断系统的稳定 性: 。 9.已知离散系统函数1 .07.02 )(2 +-+=z z z z H ,试判断系统的稳定性: 。 10.如图所示是离散系统的Z 域框图,该系统的系统函数H(z)= 。 二.(15分)如下方程和非零起始条件表示的连续时间因果LTI 系统, ?????==+=++-- 5 )0(',2)0()(52)(452 2y y t f dt df t y dt dy dt y d 已知输入 )()(2t e t f t ε-=时,试用拉普拉斯变换的方法求系统的零状态响应 )(t y zs 和零输入响应)(t y zi ,0≥t 以及系统的全响应),(t y 0≥t 。 班级: 学生学号: 学生姓名: 适用专业年级:2007 物理 出题教师: 试卷类别:A (√) 、B ()、C ( ) 考试形式:开卷( √)、闭卷( ) 印题份数: 实验报告 实验二连续时间系统的时域分析 一、实验目的: 1、掌握用Matlab进行卷积运算的数值方法和解析方法,加深对卷积积分的理解。 2、学习利用Matlab实现LTI系统的冲激响应、阶跃响应和零状态响应。 二、实验内容及步骤 实验前,必须首先阅读本实验原理,读懂所给出的全部范例程序。实验开始时,先在计算机上运行这些范例程序,观察所得到的信号的波形图。并结合范例程序应该完成的工作,进一步分析程序中各个语句的作用,从而真正理解这些程序。 1、 编写程序Q2_1,完成)(1t f 与)(2t f 两函数的卷积运算。 2、 编写程序Q2_2,完成)(1t f 与)(2t f 两函数的卷积运算。 3、编写程序Q2_3。利用程序Q2_1,验证卷积的相关性质。 (a) 验证性质:)()(*)(t x t t x =δ (b) 验证性质: )()(*)(00t t x t t t x -=-δ 4、编写程序Q2_4。某线性时不变系统的方程为 )(8)(2)(6)(5)(t f t f t y t y t y +'=+'+'', (a)系统的冲激响应和阶跃响应。 (b)输入()()t f t e u t -=,求系统的零状态响应)(t y zs 。 三. 实验结果 一: dt=0.01 t1=0:dt:2 f1=0.5*t1 t2=0:dt:2 f2=0.5*t2 f=dt*conv(f1,f2) t=0:0.01:4 plot(t,f);axis([-1 5 0 0.8]) 二: dt=0.01 t=-3:dt:3 t1=-6:dt:6 ft1=2*rectpuls(t,2) ft2=rectpuls(t,4) y=dt*conv(ft1,ft2) plot(t1,y) axis([-4 4 0 5]) 以上两题出现错误点:(1)最开始模仿例1的写法用function [f,k]=sconv,总提示出现 错误 (2)t0+t2 ≤ t ≤ t1+t3 不大能理解的运用个特点,在编写的时候总是被忽略。导致t和t1设置的长度总出错。 三: (a) dt=0.01 t=0:dt:2 t0=0 t1=0:dt:2t2=0:dt:2 A 卷 第(1)页,共(12)页 模拟试题三及答案 考场号 座位号 班级 姓名 学号 题号 一 二 三 四 五 六 总分 得分 一、(共25分,每小题5分)基本计算题 1. 试应用冲激函数的性质,求表示式2()t t dt δ∞ -∞?的值。 2.一个线性时不变系统,在激励)(1t e 作用下的响应为)(1t r ,激励)(2t e 作用下的响应为)(2t r ,试求在激励1122()()D e t D e t +下系统的响应(假定起始时刻系统无储能)。 3.有一LTI 系统,当激励)()(1t u t x =时,响应21()3()t y t e u t -=,试求当激励2()()x t t δ=时,响应)(2t y 的表示式(假定起始时刻系统无储能)。 4.试绘出时间函数)]1()([--t u t u t 的波形图。 A 卷 第(2)页,共(12)页 5.试求函数2(1)()t e u t --的单边拉氏变换。 二、(15分,每问5分)已知某系统的系统函数为23 ()710 s H s s s += ++,试求(1)该 系统函数的零极点;(2)判断该系统的稳定性;(3)该系统是否为无失真传输系统,请写出判断过程。 三、(10分)已知周期信号f (t )的波形如下图所示,求f (t )的傅里叶变换F (ω)。 1() t f A 卷 第(3)页,共(12)页 四、(10分)信号f (t )频谱图()F ω如图所示,请粗略画出: (1)0()cos()f t t ω的频谱图;(2)0()j t f t e ω的频谱图(注明频谱的边界频率)。 《计算机控制系统》第二次作业答案 你的得分: 完成日期:2018年09月10日01点51分 说明:每道小题选项旁的标识是标准答案。 一、单项选择题。本大题共16个小题,每小题分,共分。在每小题给出的选项中,只有一项是符合题目要求的。 1.()是将生产过程工艺参数转换为电参数的装置。 A.传感器 B.A/D转换器 C.D/A转换器 D.互感器 2.在计算机和生产过程之间设置的信息传送和转换的连接通道是()。 A.接口 B.过程通道 C.模拟量输入通道 D.开关量输入通道 3.所谓量化,就是采用一组数码来逼近离散模拟信号的幅值,将其转换为()。 A.模拟信号 B.数字信号 C.程序代码 D.量化代码 4.数控系统一般由输入装置、输出装置、控制器和插补器等四大部分组成,这些功能 都由()来完成。 A.人 B.生产过程 C.计算机 D.实时计算 5.外界干扰的扰动频率越低,进行信号采集的采样周期应该越()。 A.长 B.短 C.简单 D.复杂 6.数字PID控制器是控制系统中应用最为广泛的一种控制规律,其中能迅速反应误差, 从而减小误差,但不能消除稳态误差的是()。 A.微分控制 B.积分控制 C.比例控制 D.差分控制 7.在计算机控制系统中,PID控制规律的实现必须采用数值逼近的方法。当采样周期 短时,用求和代替积分、用后向差分代替微分,使模拟PID离散化变为()。 A.微分方程 B.差分方程 C.积分方程 D.离散方程 8.香农采样定理给出了采样周期的上限,采样周期的下限为计算机执行控制程序和() 所耗费的时间,系统的采样周期只能在Tmin和Tmax之间选择。 A.输入输出 B.A/D采样时间 C.D/A转换时间 D.计算时间 9.在有交互作用的多参数控制系统中,振铃现象有可能影响到系统的()。 A.可靠性 B.稳定性 C.经济性 D.通用性 10.在实际生产过程中,因为前馈控制是一个(),因此,很少只采用前馈控制的方案, 常常采用前馈-反馈控制相结合的方案。 A.开环系统 B.闭环系统 C.稳定系统 D.不稳定系统 11.软件是工业控制机的程序系统;其中面向控制系统本身的程序,并根据系统的具体 要求,由用户自己设计的软件称作()。 A.系统软件 B.应用软件 C.支持软件 D.控制软件 12.在程序设计的过程中,程序设计人员选取一种适当地高级(或汇编)语言,书写程 序的步骤叫做()。 A.编译 B.程序设计 C.调试 D.编码 13.一个12位的A/D转换器,其量化精度约为%,若其孔径时间为10微妙,如果要求 转换误差在转换精度内,则允许转换的正旋波模拟信号的最大频率为()。 A.2HZ B.3HZ C.4HZ 14.14位A/D转换的分辨率为()。 A. B. C. D. 15.如果设计加工第一象限的直线OA,起点为O(0,0)终点坐标为A(11,7),则 进行插补运算的结果是,在+x方向走的步数应当是()。 A.11 B.12 实验二 常用信号分类与观察 一、实验目的 1、观察常用信号的波形特点及产生方法。 2、学会使用示波器对常用波形参数的测量。 二、实验内容 1、信号的种类相当的多,这里列出了几种典型的信号,便于观察。 2、这些信号可以应用到后面的“基本运算单元”和“无失真传输系统分析”中。 三、实验仪器 1、信号与系统实验箱一台(主板)。 2、20MHz 双踪示波器一台。 四、实验原理 对于一个系统特性的研究,其中重要的一个方面是研究它的输入输出关系,即在一特定的输入信号下,系统对应的输出响应信号。因而对信号的研究是对系统研究的出发点,是对系统特性观察的基本手段与方法。在本实验中,将对常用信号和特性进行分析、研究。 信号可以表示为一个或多个变量的函数,在这里仅对一维信号进行研究,自变量为时间。常用信号有:指数信号、正弦信号、指数衰减正弦信号、抽样信号、钟形信号、脉冲信号等。 1、正弦信号:其表达式为)sin()(θω+=t K t f ,其信号的参数:振幅K 、角频率ω、与初始相位θ。其波形如下图所示: 图 1-5-1 正弦信号 2、指数信号:指数信号可表示为at Ke t f =)(。对于不同的a 取值,其波形表现为不同的形式,如下图所示: 图 1-5-2 指数信号 3、指数衰减正弦信号:其表达式为 ?? ???><=-)0()sin()0(0)(t t Ke t t f at ω 其波形如下图: 图 1-5-3 指数衰减正弦信号 4、抽样信号:其表达式为: sin ()t Sa t t = 。)(t Sa 是一个偶函数,t = ±π,±2π,…,±n π时,函数值为零。该函数在很多应用场合具有独特的运用。其信号如下图所示: 信号与系统题库 一.填空题 1. 正弦信号)4/ 2.0sin(5)(ππ+=t t f 的周期为: 10 。 2. ))()1((t e dt d t ε--= )(t e t ε- 3. ττδd t ? ∞ -)(= )(t ε 4. ? +---?3 2 5d )1(δe t t t = 5. ? +∞ ∞ --?t t d )4/(δsin(t)π= 6. )(*)(t t εε= )(t t ε 7. LTI 系统在零状态条件下,由 引起的响应称为单位冲激响应,简称冲激响应。 8. LTI 系统在零状态条件下,由 引起的响应称为单位阶跃响应,简称阶跃响应。 9. )(*)(t t f δ= )(t f 10. )('*)(t t f δ= )('t f 11. )(*)(21t f t f 的公式为 12. =2*)(t δ 13. 当周期信号)(t f 满足狄里赫利条件时,则可以用傅里叶级数表示: ∑∞ =++=1 110)]sin()cos([)(n n n t nw b t nw a a t f ,由级数理论可知:0a = , n a = ,n b = 。 14. 周期信号)(t f 用复指数级数形式表示为: ∑∞ -∞ == n t jnw n e F t f 1)(,则 n F = 。 15. 对于周期信号的重复周期T 和脉冲持续时间τ(脉冲宽度)与频谱的关系是: 当 保持周期T 不变,而将脉宽τ减小时,则频谱的幅度随之 ,相邻谱线的间隔不变,频谱包络线过零点的频率 ,频率分量增多,频谱幅度的收敛速度相应变慢。 16. 对于周期信号的重复周期T 和脉冲持续时间τ(脉冲宽度)与频谱的关系是: 当保持周期脉宽τ不变,而将T 增大时,则频谱的幅度随之 ,相邻谱线的间隔变小,谱线变密,但其频谱包络线过零点的坐标 。 17. 对于非周期信号)(t f 的傅里叶变换公式为:)(w F = 。 反变换公式:)(t f = 18. 门函数???? ?< =其他 2||1 )(τ τt t g 的傅里叶变换公式为: 19. )()(2t t εδ+的傅里叶变换为: 20. t e 23-的频谱是 。 21. )(3t ε的频谱是 。 22. 如果)(t f 的频谱是)(w F ,则)(0t t f -的频谱是 。 23. 在时-频对称性中,如果)(t f 的频谱是)(w F ,则)(t F 的频谱是 。 24. 如果)(1t f 的频谱是)(1w F ,)(2t f 的频谱是)(2w F ,则)(*)(21t f t f 的频谱是 。 25. 如果)(t f 的频谱是)(w F ,则 )(t f dt d 的频谱是 。 26. 如果)(t f 的频谱是)(w F ,则ττd f t ? ∞ -)(的频谱是 。 27. 由于t jnw e 0的频谱为)(20w w -πδ,所以周期信号∑∞ -∞ == n t jnw n e F t f 1)(的傅里叶变 换)(w F = 。 28. 指数序列)(n a n ε的z 变换为 。 29. 单位脉冲序列)(n δ的z 变换为 。 6-1.PLC由哪些部分组成?各有什么功能? 答:PLC主要由CPU、存储器和输入/输出接口、编程器四部分组成。 CPU是PLC的核心,其主要作用可概括如下: ①接收并存贮从编程器输入的用户程序。 ②用扫描方式采集现场输入装置的状态和数据,并存入相应的数据寄存器中。 ③诊断电源及PLC内部电路的工作状态和编程过程中的语法错误。 ④执行用户程序。从程序存贮器中逐条取出用户程序,经过解释程序解释后逐条执行。完成程序规定的逻辑和算术运算,产生相应的控制信号去控制输出电路,实现程序规定的各种操作。 存储器用来存放程序和数据,分为系统程序存储器和用户程序存储器两部分。系统程序存储器用以存放系统程序,包括管理程序,监控程序以及对用户程序做编译处理的解释编译程序。由只读存储器、ROM组成。厂家使用的,内容不可更改,断电不消失。用户存储器分为用户程序存储区和工作数据存储区。由随机存取存储器(RAM)组成。用户使用的。断电内容消失。 输入/输出接口是CPU与工业现场装置之间的连接部件,是PLC的重要组成部分。输入接口的功能是采集现场各种开关接点的状态信号,并将其转换成标准的逻辑电平信号送给CPU处理。输出接口的功能是通过输出接口电路把内部的数字电路化成一种信号使负载动作或不动作。 编程器是开发、维护PLC控制系统的必备设备。编程器通过电缆与PLC相连接,其主要功能如下: ①通过编程向PLC输入用户程序 ②在线监视PLC的运行情况 ③完成某些特定功能。如将PLC、RAM中的用户程序写入EPROM,或转贮到盒式磁带 上;给PLC发出一些必要的命令,如运行、暂停、出错。复位。 6-3.PLC的扫描工作方式分为那几个阶段?各阶段完成什么任务? PLC的基本工作过程如下: ①输入现场信息:在系统软件的控制下,顺次扫描各输入点.读入各输入点的状态。 ②执行程序:顺次扫描程序中的各条指令,根据输入状态和指令内容进行逻辑运算。 ③输出控制信号:根据逻辑运算的结果,向各输出点发出相应的控制信号,实现所要求的逻辑控制功能。 上述过程执行完后,又重新开始,反复地执行。每执行一遍所需的时间称为扫描周期,PLC 的扫描周期通常为10~40ms。 6-5.汇出下列指令程序的梯形图。 1 LD 401 2 AND 402 3 LD 403 4 ANI 404 5 ORB 6 LD 405 7 AND 406 8 LDI 407 9 AND 410 10 ORB 信科0801《信号与系统》复习参考练习题一、单项选择题: 14、已知连续时间信号,) 2(100)2(50sin )(--=t t t f 则信号t t f 410cos ·)(所占有的频带宽度为() A .400rad /s B 。200 rad /s C 。100 rad /s D 。50 rad /s f如下图(a)所示,其反转右移的信号f1(t) 是() 15、已知信号)(t f如下图所示,其表达式是() 16、已知信号)(1t A、ε(t)+2ε(t-2)-ε(t-3) B、ε(t-1)+ε(t-2)-2ε(t-3) C、ε(t)+ε(t-2)-ε(t-3) D、ε(t-1)+ε(t-2)-ε(t-3) 17、如图所示:f(t)为原始信号,f1(t)为变换信号,则f1(t)的表达式是() A、f(-t+1) B、f(t+1) C、f(-2t+1) D、f(-t/2+1) 18、若系统的冲激响应为h(t),输入信号为f(t),系统的零状态响应是( ) 19。信号)2(4sin 3)2(4cos 2)(++-=t t t f π π 与冲激函数)2(-t δ之积为( ) A 、2 B 、2)2(-t δ C 、3)2(-t δ D 、5)2(-t δ ,则该系统是()>-系统的系统函数.已知2]Re[,6 51)(LTI 202s s s s s H +++= A 、因果不稳定系统 B 、非因果稳定系统 C 、因果稳定系统 D 、非因果不稳定系统 21、线性时不变系统的冲激响应曲线如图所示,该系统微分方程的特征根是( ) A 、常数 B 、 实数 C 、复数 D 、实数+复数 22、线性时不变系统零状态响应曲线如图所示,则系统的输入应当是( ) A 、阶跃信号 B 、正弦信号 C 、冲激信号 D 、斜升信号 一.填空题(本大题共10空,每空2分,共20分。) 1.()*(2)k k εδ-= . 2. sin()()2 t d π τδττ-∞ + =? . 3. 已知信号的拉普拉斯变换为 1 s a -,若实数a ,则信号的傅里叶变换不存在. 4. ()()()t h t f t y *=,则()=t y 2 . 5. 根据Parseval 能量守恒定律,计算?∞ ∞-=dt t t 2 )sin ( . 6. 若)(t f 最高角频率为m ω,则对 )2()4()(t f t f t y =取样,其频谱不混迭的最大间隔是 . 7. 某因果线性非时变(LTI )系统,输入)()(t t f ε=时,输出为: )1()()(t t e t y t --+=-εε;则) 2()1()(---=t t t f εε时,输出)(t y f = . 8. 已知某因果连续LTI 系统)(s H 全部极点均位于s 左半平面,则 ∞→t t h )(的值为 . 9. 若)()(ωj F t f ?,已知)2cos()(ωω=j F ,试求信号)(t f 为 . 10.已知某离散信号的单边z 变换为) 3(,)3)(2(2)(2>+-+=z z z z z z F ,试求其反变换 )(k f = . 二.选择题(本大题共5小题,每题4分,共20分。) 1.下列信号的分类方法不正确的是 : A 、数字信号和离散信号 B 、确定信号和随机信号 C 、周期信号和非周期信号 D 、因果信号与反因果信号 2. )]2()()[2()]()2([2)(1--++-+=t t t t t t f εεεε,则)] 1()2 1()[21()(--+-=t t t f t f εε 信号与系统实验报告实验一信号与系统的时域分析 学院:信息工程学院 班级:2012级电子信息工程三班姓名: 学号:2012550711 指导老师:苏永新 一、实验目的 1、熟悉和掌握常用的用于信号与系统时域仿真分析的MATLAB函数; 2、掌握连续时间和离散时间信号的MATLAB产生,掌握用周期延拓的方法将一个非周期信号进行周期信号延拓形成一个周期信号的MATLAB编程; 3、牢固掌握系统的单位冲激响应的概念,掌握LTI系统的卷积表达式及其物理意义,掌握卷积的计算方法、卷积的基本性质; 4、掌握利用MATLAB计算卷积的编程方法,并利用所编写的MATLAB程序验证卷积的常用基本性质; 掌握MATLAB描述LTI系统的常用方法及有关函数,并学会利用MATLAB求解LTI系统响应,绘制相应曲线。 基本要求:掌握用MATLAB描述连续时间信号和离散时间信号的方法,能够编写MATLAB 程序,实现各种信号的时域变换和运算,并且以图形的方式再现各种信号的波形。掌握线性时不变连续系统的时域数学模型用MATLAB描述的方法,掌握卷积运算、线性常系数微分方程的求解编程。 二、实验内容及步骤 实验前,必须首先阅读本实验原理,读懂所给出的全部范例程序。实验开始时,先在计算机上运行这些范例程序,观察所得到的信号的波形图。并结合范例程序应该完成的工作,进一步分析程序中各个语句的作用,从而真正理解这些程序。 实验前,一定要针对下面的实验项目做好相应的实验准备工作,包括事先编写好相应的实验程序等事项。 Q1-1:修改程序Program1_1,将dt改为0.2,再执行该程序,保存图形,看看所得图形的效果如何? dt = 0.01时的信号波形 dt = 0.2时的信号波形 此处粘贴图形此处粘贴图形% Program1_1 % This program is used to generate a sinusoidal signal and draw its plot clear, % Clear all variables 《信号与系统》模拟试卷2 一、选择题 3.若L[f (t )]=F (s ),则L[f (at )]=[ ]。 A F (a s ) B aF (a s ) C )(1as F a D )(1a s F a 4.已知£[f (n )]=F (z )z >a,则Z[nf (n )]=[ ]。 A ()a z z F dz d >, B ()a z z F dz d z >, C ()a z z F dz d z >-, D ()()max ,0,1a z z F z > 5.序列f (n )=—3u (n —1)的Z 变换F (z )的代数式为F (z )= 13-z z ,其收敛域为[ ] A ()∞,1:z B ()∞,0:z C ()3,1:z D ()1,0:z 6.下列各式为描述离散时间系统的差分方程: A y 1(n )=[f 1(n )]2 B y 2(n )=2f (n )cos (3n+ 3 π) C y 3(n+1)= 2f (n )+3 D y 4(n )= 2f (n ) 其中[ ]所描述的系统为线性、时不变、因果的。 7.卷积和f (n )*u (n —2)等于[ ] A ()∑+∞-=2n m m f B ()∑-∞=n m m f C ()∑+∞-=-2m m n f D ()∑--∞=2 n m m f 8.线性系统的系统函数H (s )=()()1 +=s s s F s Y ,若其零状态响应y (t )=(1—e —t )u (t ),则系统的输入f (t )等于[ ]。 A ()t δ B ()t u C ()t u e t - D ()t tu 9.单边Z 变换()13212+-= z z z F 的原序列f (n )等于[ ]。 《信号与系统》复习题 1.已知 f(t) 如图所示,求f(-3t-2) 。 2.已知 f(t) ,为求 f(t0-at) ,应按下列哪种运算求得正确结果?(t0 和 a 都为正值) 3.已知 f(5-2t) 的波形如图,试画出f(t) 的波形。 解题思路:f(5-2t)乘a 1 / 2展宽 2倍f(5-2 × 2t)= f(5-t) 反转 右移 5 f(5+t) f(5+t-5)= f(t) 4.计算下列函数值。 ( 1) ( 2) ( t ) t 0 )dt t 0 u(t 2 (t t 0)u(t 2t 0 )dt ( 3) (e t t ) (t 2)dt 5.已知离散系统框图,写出差分方程。 解: 2 个延迟单元为二阶系统,设左边延迟单元输入为 x(k) ∑ 0 1 1) → 左○ :x(k)=f(k)-a *x(k-2)- a*x(k- x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) ∑ y(k)= b 2*x(k)- b 0*x(k-2) (2) 右○ : 为消去 x(k) ,将 y(k) 按( 1)式移位。 a 1*y(k-1)= b 2 * a 1*x(k-1)+ b * a 1*x(k-3) (3) a 0*y(k-2)= b 2 * a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2) 、( 3)、( 4)三式相加: y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b *[x(k)+ a 1 *x(k-1)+a *x(k-2)]- b *[x(k-2)+a 1*x(k-3)+a *x(k-4)] 2 0 0 0 ∴ y(k)+ a 1 *y(k-1)+ a *y(k-2)= b 2 *f(k)- b *f(k-2) ═ >差分方程(完整)期末信号与系统试题及答案,推荐文档
信号与系统实验2
信号与系统模拟试题三及答案
计算机控制系统第二次作业答案
信号与系统实验二
信号与系统试卷题库
机电传动控制第二次作业
信号与系统试题附答案
信号与系统期末试卷-含答案全
信号与系统实验一
《信号与系统》模拟试卷2
(完整版)信号与系统习题答案.docx