遗传算法基本原理及改进

遗传算法基本原理及改进
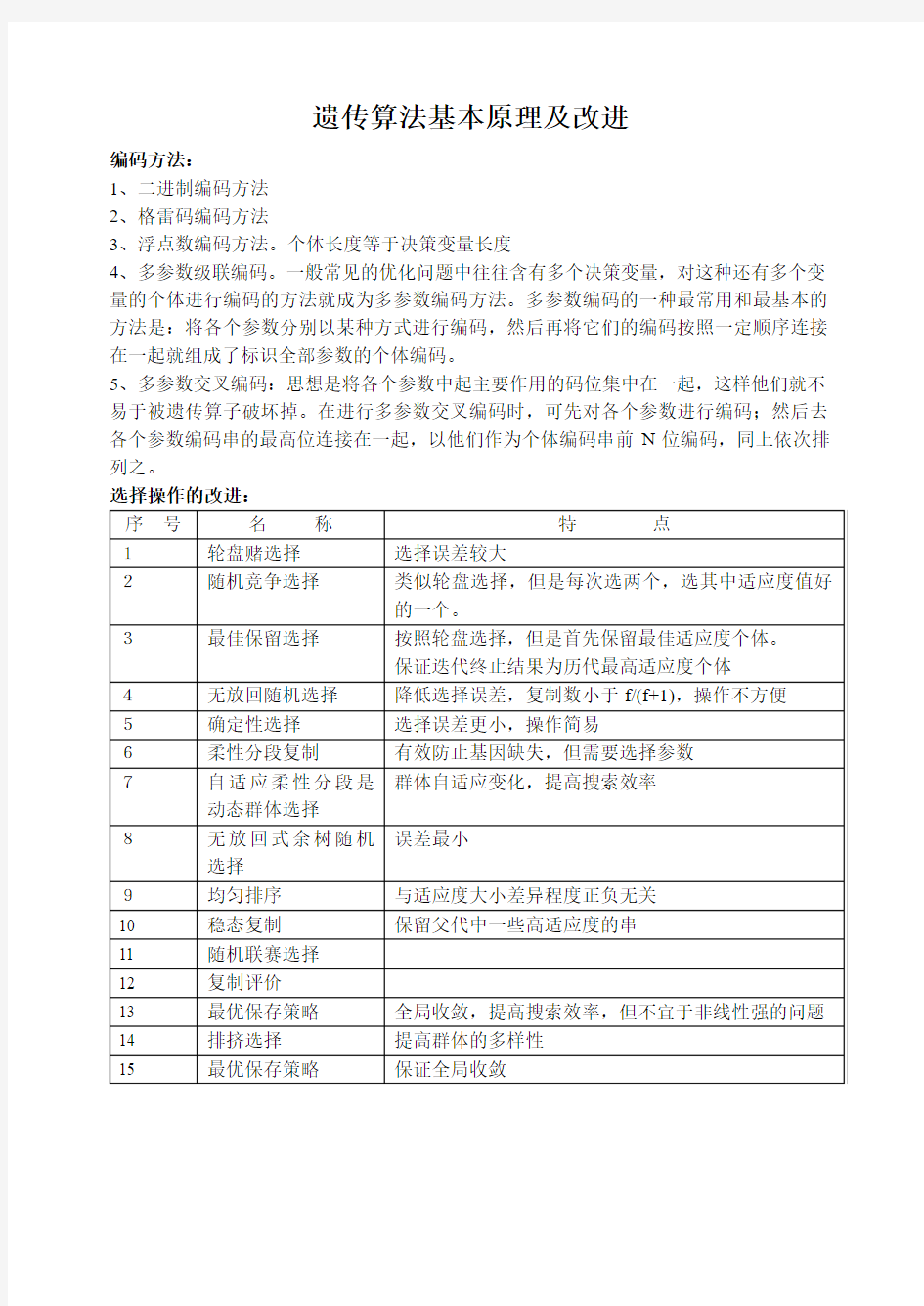
编码方法:
1、二进制编码方法
2、格雷码编码方法
3、浮点数编码方法。个体长度等于决策变量长度
4、多参数级联编码。一般常见的优化问题中往往含有多个决策变量,对这种还有多个变量的个体进行编码的方法就成为多参数编码方法。多参数编码的一种最常用和最基本的方法是:将各个参数分别以某种方式进行编码,然后再将它们的编码按照一定顺序连接在一起就组成了标识全部参数的个体编码。
5、多参数交叉编码:思想是将各个参数中起主要作用的码位集中在一起,这样他们就不易于被遗传算子破坏掉。在进行多参数交叉编码时,可先对各个参数进行编码;然后去各个参数编码串的最高位连接在一起,以他们作为个体编码串前N位编码,同上依次排列之。
改进遗传算法的方法:
(1)改进遗传算法的组成成分或实用技术,如选用优化控制参数、适合问题的编码技术等。
(2)采用动态自适应技术,在进化过程中调整算法控制参数和编码精度。
(3)采用混合遗传算法
(4)采用并行算法
(5)采用非标准的遗传操作算子
改进的遗传算法:
(1)分层遗传算法
(2)CHC算法
(3)messy遗传算法;
(4)自实用遗传算法(Adaptive Genetic Algorithm)
(5)基于小生境技术的遗传算法(Niched Genetic Algorithm,简称NGA)。
(6)并行遗传算法(Parallel Genetic Algorithm)
(7)混合遗传算法:遗传算法与最速下降法相结合的混合遗传算法;遗传算法与模拟退火算法相结合的混合遗传算法。
解决标准遗传算法早熟收敛和后期搜索迟钝的方案
(1)变异和交叉算子的改进和协调采用
将进化过程划分为渐进和突变两个不同阶段
采用动态变异
运用正交设计或均匀设计方法设计新的交叉和变异算子
(2)采用局部搜索算法解决局部搜索能力差的问题
(3)采用有条件的替代父代的方法,解决单一的群体更新方式难以兼顾多样性和收敛性的问题
(4)收敛速度慢的解决方法;
产生好的初始群体
利用小生境技术
使用移民技术
采用自适应算子
采用与局部搜索算法相结合的混合遗传算法
对算法的参数编码采用动态模糊控制
进行未成熟收敛判断
遗传算法
遗传算法发展前景概况 (华北电力大学电气与电子工程学院,北京102206) 摘要:遗传算法是一种基于生物进化自然选择和群体遗传机理的,适合于复杂系统优化的自适应概率优化技术,近年来,因为遗传算法求解复杂优化问题的巨大潜力和在工业工程领域的成功应用,这种算法受到了国内外学者的广泛关注,本文介绍了遗传算法研究现状和发展的前景,概述了它的理论和技术,并对遗传算法的发展情况发表了自己的看法。 关键词:遗传算法; 遗传算子;进化计算;编码 GENERAL GENETIC ALGORITHM DEVELOPMENT PROSPECT (North China Electric Power University Electrical And Electronic Engineering Institute,Beijing102206) ABSTRACT: Genetic algorithm is a kind of natural selection and based on biological evolution of genetic mechanism, group suitable for complex system optimization adaptive probability optimization technique, in recent years, because genetic algorithm for solving complex optimization problem in the huge potential and the successful application of industrial engineering, this algorithm was wide attention of scholars at home and abroad, this paper introduces the current research status and development of genetic algorithm, summarizes the prospect of its theory and technology of genetic algorithm and the development of published opinions of his own. KEY WORD: Genetic algorithm; Genetic operator; Evolutionary computation; coding 1.引言 现在,遗传算法正在迅速发展,遗传算法与其很强的解决问题能力和适合于复杂系统的自适应优化技术渗透到研究和工业工程领域,在电力系统,系统辨识,最优控制,模式识别等领域有了很广泛的应用,取得了很好的效果。 2.遗传算法基本思想 遗传算法是建立在自然选择和群体遗传学基础上的随机,迭代和进化,具有广泛适用性的搜索方法,所有的自然种类都是适应环境而生存,这一自然适用性是遗传算法的主要思想。 遗传算法是从代表问题可能潜在解集的一个种群开始的,而一个种群则经过基因编码的一定数目的个体组成。每个个体实际上是染色体带有特征的实体。染色体作为遗传物质的主要载体,其内部基因决定了个体的外部表现。因此,在一开始就要实现外部表现到内部基因的映射,即编码工作,通常采用二进制码。初始种群产生之后,按照适者生存和优胜劣汰的原则,逐代演化产生出越来越好的近似解。在每一代,根据问题域中个体的适应度大小选择个体,并借助自然遗传学的遗传算子进行组合交叉和变异,产生出代表新的解集和种群,这种过程将导致种群像自然进化那样产生比前代更适应于环境的后代种群,末代种群中的最有个体经过解码,可以作为问题近似最优解。 遗传算法采纳了自然进化模型,如选择,交叉,变异等,计算开始时,种群随机初始化产生一定数目的N个个体,并计算每个个体的适应度函数,如果不满足优化准则,就开始新一代的计算。为了产生下一代,按照适应度选择个体父代进行基因重组二产生子代。所有的子代按一定的概率进行变异,子代取代父代构成新一代,然后重新计算子代的适应度。这一过程循环执行,直到满足优化准则为止。 3.遗传算法基本操作
一种改进的遗传算法
第17卷第3期 辽阳石油化工高等专科学校学报Vol.17No.3 2001年9月 Journal of Liaoyang Petrochemical College September2001 一种改进的遗传算法 王亮申 王文友 吴克勤 江远鹏 谢 荣 (辽阳石油化工高等专科学校机械系,辽阳111003) 摘 要 给出的适应值标定公式能够解决对个体选择压力和标定后适应值非负问题. 对多极值函数的遗传算法所提出的改进措施可以增加群体的多样性,避免算法“早熟”,过早 陷入局部最优. 关键词 遗传算法;适应值标定;早熟 中图分类号 O224 由美国密执安(Michrgan)大学的Holland教授等人在1975年创立的遗传算法(G enetic Algo2 rithms简称G A),是建立在达尔文(Darwin)的生物进化论和孟德尔(Mendel)的遗传学说基础上的算法.经过后人的不断改进使得遗传算法更加完善.由于遗传算法求解复杂优化问题的巨大潜力及其在各个领域(如布局优化问题、交通问题、图像处理与识别、结构设计、电力系统设计、可靠性计算等)的成功应用,这种算法越来越被人们所接受. 遗传算法是一种基于生物进化原理构想出来的搜索最优解的仿生算法,它模拟基因重组与进化的自然过程,把待解决问题的参数编成二进制码或十进制码(也可编成其它进制码)即基因(gene),若干基因组成一个染色体(个体),许多染色体进行类似于自然选择、配对交叉和变异运算,经过多次重复迭代(即世代遗传)直至得到最后的优化结果.习惯上,适应度值越大,表示解的质量越好.对于求解最小值问题可通过变换转为求解最大值问题.遗传算法是一种高度并行、随机、自适应搜索算法. 尽管遗传算法有许多优点,也有许多专家学者对遗传算法进行不断研究,但目前存在的问题依然很多.如(1)适应值标定方式多种多样,没有一个简洁、通用方法,不利于对遗传算法的使用; (2)遗传算法的“早熟”现象即很快收敛到局部最 收稿日期:2001-06-27优解而不是全局最优解是迄今为止最难处理的关键问题;(3)快要接近最优解时在最优解附近左右摆动,收敛较慢. 1 改进方法 1.1 适应值标定 初始种群中可能存在特殊个体的适应值超常(如很大).为了防止其统治整个群体并误导群体的发展方向而使算法收敛于局部最优解需限制其繁殖;在计算临近结束,遗传算法逐渐收敛,由于群体中个体适应值比较接近,继续优化选择困难,造成在最优解附近左右摇摆,此时应将个体适应值适当加以放大,以提高选择能力,这就是适应值的标定.文献[1]提出的标定方法有两个计算公式,不利于使用;文献[2]的标定方式虽然限制了适应值范围但将最大最小值颠倒.此外象幂律标定、对数标定等亦有应用.本文针对适应值标定问题提出以下计算公式. f’= 1 f max-f min+δ (f+|f min|) f′—为标定后的适应值;f—为原适应值;δ—为在(0,1)内的一个正实数,目的是防止分母为零和增加遗传算法的随机性;|f min|—是为了保证定标后的适应值不出现负值。
第三章-遗传算法的理论基础
第三章 遗传算法的理论基础 遗传算法有效性的理论依据为模式定理和积木块假设。模式定理保证了较优的模式(遗传算法的较优解)的样本呈指数级增长,从而满足了寻找最优解的必要条件,即遗传算法存在着寻找到全局最优解的可能性。而积木块假设指出,遗传算法具备寻找到全局最优解的能力,即具有低阶、短距、高平均适应度的模式(积木块)在遗传算子作用下,相互结合,能生成高阶、长距、高平均适应度的模式,最终生成全局最优解。Holland 的模式定理通过计算有用相似性,即模式(Pattern)奠定了遗传算法的数学基础。该定理是遗传算法的主要定理,在一定程度上解释了遗传算法的机理、数学特性以及很强的计算能力等特点。 3.1 模式定理 不失一般性,本节以二进制串作为编码方式来讨论模式定理(Pattern Theorem)。 定义3.1 基于三值字符集{0,1,*}所产生的能描述具有某些结构相似性的0、1字符串集的字符串称作模式。 以长度为5的串为例,模式*0001描述了在位置2、3、4、5具有形式“0001”的所有字符串,即(00001,10001) 。由此可以看出,模式的概念为我们提供了一种简洁的用于描述在某些位置上具有结构相似性的0、1字符串集合的方法。 引入模式后,我们看到一个串实际上隐含着多个模式(长度为 n 的串隐含着2n 个模式) ,一个模式可以隐含在多个串中,不同的串之间通过模式而相互联系。遗传算法中串的运算实质上是模式的运算。因此,通过分析模式在遗传操作下的变化,就可以了解什么性质被延续,什么性质被丢弃,从而把握遗传算法的实质,这正是模式定理所揭示的内容 定义3.2 模式H 中确定位置的个数称作该模式的阶数,记作o(H)。比如,模式 011*1*的阶数为4,而模式 0* * * * *的阶数为1。 显然,一个模式的阶数越高,其样本数就越少,因而确定性越高。 定义3.3 模式H 中第一个确定位置和最后一个确定位置之间的距离称作该模式的定义距,记作)(H δ。比如,模式 011*1*的定义距为4,而模式 0* * * * *的定义距为0。 模式的阶数和定义距描述了模式的基本性质。 下面通过分析遗传算法的三种基本遗传操作对模式的作用来讨论模式定理。令)(t A 表示第t 代中串的群体,以),,2,1)((n j t A j =表示第t 代中第j 个个体串。 1.选择算子 在选择算子作用下,与某一模式所匹配的样本数的增减依赖于模式的平均适值,与群体平均适值之比,平均适值高于群体平均适值的将呈指数级增长;而平均适值低于群体平均适值的模式将呈指数级减少。其推导如下: 设在第t 代种群)(t A 中模式所能匹配的样本数为m ,记为),(t H m 。在选择中,一个位串 j A 以概率/j j i P f f =∑被选中并进行复制,其中j f 是个体)(t A j 的适应度。假设一代中群体 大小为n ,且个体两两互不相同,则模式H 在第1+t 代中的样本数为:
遗传算法基本原理及改进
遗传算法基本原理及改进 编码方法: 1、二进制编码方法 2、格雷码编码方法 3、浮点数编码方法。个体长度等于决策变量长度 4、多参数级联编码。一般常见的优化问题中往往含有多个决策变量,对这种还有多个变量的个体进行编码的方法就成为多参数编码方法。多参数编码的一种最常用和最基本的方法是:将各个参数分别以某种方式进行编码,然后再将它们的编码按照一定顺序连接在一起就组成了标识全部参数的个体编码。 5、多参数交叉编码:思想是将各个参数中起主要作用的码位集中在一起,这样他们就不易于被遗传算子破坏掉。在进行多参数交叉编码时,可先对各个参数进行编码;然后去各个参数编码串的最高位连接在一起,以他们作为个体编码串前N位编码,同上依次排列之。
改进遗传算法的方法: (1)改进遗传算法的组成成分或实用技术,如选用优化控制参数、适合问题的编码技术等。 (2)采用动态自适应技术,在进化过程中调整算法控制参数和编码精度。 (3)采用混合遗传算法 (4)采用并行算法 (5)采用非标准的遗传操作算子 改进的遗传算法: (1)分层遗传算法 (2)CHC算法 (3)messy遗传算法; (4)自实用遗传算法(Adaptive Genetic Algorithm) (5)基于小生境技术的遗传算法(Niched Genetic Algorithm,简称NGA)。 (6)并行遗传算法(Parallel Genetic Algorithm) (7)混合遗传算法:遗传算法与最速下降法相结合的混合遗传算法;遗传算法与模拟退火算法相结合的混合遗传算法。 解决标准遗传算法早熟收敛和后期搜索迟钝的方案 (1)变异和交叉算子的改进和协调采用 将进化过程划分为渐进和突变两个不同阶段 采用动态变异 运用正交设计或均匀设计方法设计新的交叉和变异算子 (2)采用局部搜索算法解决局部搜索能力差的问题 (3)采用有条件的替代父代的方法,解决单一的群体更新方式难以兼顾多样性和收敛性的问题 (4)收敛速度慢的解决方法; 产生好的初始群体 利用小生境技术 使用移民技术 采用自适应算子 采用与局部搜索算法相结合的混合遗传算法 对算法的参数编码采用动态模糊控制 进行未成熟收敛判断
基于最小二乘法的系统辨识的设计与开发(整理版)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 基于最小二乘法的系统辨识的设计与开发(整理版)课程(论文)题目: 基于最小二乘法的系统辨识摘要: 最小二乘法是一种经典的数据处理方法。 最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。 在系统辨识领域中, 最小二乘法是一种得到广泛应用的估计方法, 可用于动态系统, 静态系统, 线性系统, 非线性系统。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 关键词: 最小二乘法;系统辨识;参数估计 1 引言最小二乘理论是有高斯( K.F.Gauss)在 1795 年提出: 未知量的最大可能值是这样一个数值,它使各次实际观测值和计算值之间的差值的平方乘以度量其精度的数值以后的和最小。 这就是最小二乘法的最早思想。 最小二乘辨识方法提供一个估算方法,使之能得到一个在最小方差意义上与实验数据最好拟合的数学模型。 递推最小二乘法是在最小二乘法得到的观测数据的基础上,用新引入的数据对上一次估计的结果进行修正递推出下一个参数估计值,直到估计值达到满意的精确度为止。 1 / 10
对工程实践中测得的数据进行理论分析,用恰当的函数去模拟数据原型是一类十分重要的问题,最常用的逼近原则是让实测数据和估计数据之间的距离平方和最小,这即是最小二乘法。 最小二乘法是一种经典的数据处理方法。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 2 最小二乘法的系统辨识设单输入单输出线性定常系统的差分方程为: 1),()()() 1()(01knkubkubnkxakxakxnn ( 1)上式中: )(ku为输入信号;)(kx为理论上的输出值。 )(kx只有通过观测才能得到,在观测过程中往往附加有随机干扰。 )(kx的观测值)(ky可表示为 ( 2)将式( 2)代入式( 1)得 1()()() 1()(101kubkubnkyakyakyn (3) 我们可能不知道)(kn的统计特性,在这种情况下,往往把)(kn看做均值为 0 的白噪声。 设 ( 4)则式( 3)可以写成 (5) 在测量)(ku时也有测量误差,系统内部也可能有噪声,应当
遗传算法与优化问题
实验十遗传算法与优化问题 一、问题背景与实验目的 遗传算法(Genetic Algorithm —GA),就是模拟达尔文的遗传选择与自然淘汰的生物进化过程的计算模型,它就是由美国Michigan大学的J、Holla nd教授于1975 年首先提出的?遗传算法作为一种新的全局优化搜索算法,以其简单通用、鲁棒性强、适于并行处理及应用范围广等显著特点,奠定了它作为21世纪关键智能计算之一的地位. 本实验将首先介绍一下遗传算法的基本理论,然后用其解决几个简单的函数最值问题,使读者能够学会利用遗传算法进行初步的优化计算? 1. 遗传算法的基本原理 遗传算法的基本思想正就是基于模仿生物界遗传学的遗传过程?它把问题的参数用基因代表,把问题的解用染色体代表(在计算机里用二进制码表示),从而得到一个由具有不同染色体的个体组成的群体?这个群体在问题特定的环境里生存 竞争,适者有最好的机会生存与产生后代?后代随机化地继承了父代的最好特征,并也在生存环境的控制支配下继续这一过程.群体的染色体都将逐渐适应环境,不断进化,最后收敛到一族最适应环境的类似个体,即得到问题最优的解?值得注意的一点就是,现在的遗传算法就是受生物进化论学说的启发提出的,这种学说对我们用计算机解决复杂问题很有用,而它本身就是否完全正确并不重要(目前生物界对此学说尚有争议). (1)遗传算法中的生物遗传学概念 由于遗传算法就是由进化论与遗传学机理而产生的直接搜索优化方法;故而 在这个算法中要用到各种进化与遗传学的概念? 首先给出遗传学概念、遗传算法概念与相应的数学概念三者之间的对应关系这些概念
(2)遗传算法的步骤 遗传算法计算优化的操作过程就如同生物学上生物遗传进化的过程,主要有三个基本操作(或称为算子):选择(Selection)、交叉(Crossover)、变异(Mutation). 遗传算法基本步骤主要就是:先把问题的解表示成“染色体”,在算法中也就就是以二进制编码的串,在执行遗传算法之前,给出一群“染色体”,也就就是假设的可行解.然后,把这些假设的可行解置于问题的“环境”中,并按适者生存的原则从中选 择出较适应环境的“染色体”进行复制 ,再通过交叉、变异过程产生更适 应环境的新一代“染色体”群.经过这样的一代一代地进化,最后就会收敛到最适应环境的一个“染色体”上,它就就是问题的最优解. 下面给出遗传算法的具体步骤,流程图参见图1: 第一步:选择编码策略,把参数集合(可行解集合)转换染色体结构空间; 第二步:定义适应函数,便于计算适应值; 第三步:确定遗传策略,包括选择群体大小,选择、交叉、变异方法以及确定交叉概率、变异概率等遗传参数; 第四步:随机产生初始化群体; 第五步:计算群体中的个体或染色体解码后的适应值; 第六步:按照遗传策略,运用选择、交叉与变异算子作用于群体,形成下一代群体; 第七步:判断群体性能就是否满足某一指标、或者就是否已完成预定的迭代次数,不满足则返回第五步、或者修改遗传策略再返回第六步. 图1 一个遗传算法的具体步骤
利用相关分析法辨识脉冲响应
利用相关分析法辨识脉冲响应 自1205 刘彬 41251141 1 实验方案设计 1.1 生成输入数据和噪声 用M 序列作为辨识的输入信号,噪声采用标准正态分布的白噪声。 生成白噪声时,首先利用乘同余法生成U[0,1]均匀分布的随机数,再利用U[0,1]均匀分布的随机数生成标准正态分布的白噪声。 1.2 过程仿真 模拟过程传递函数)(s G ,获得输出数据y(k)。)(s G 采取串联传递函数仿真, 2 12111 11)(T s T s T T K s G ++= ,用M 序列作为辨识的输入信号。 1.3 计算互相关函数 ∑++=-= p p N r N i p Mz i z k i u rN k R )1(1 )()(1 )( 其中r 为周期数,1+=p N i 表示计算互相关函数所用的数据是从第二个周期开始的,目的是等过程仿真数据进入平稳状态。 1.4 计算脉冲响应估计值、脉冲响应理论值、脉冲响应估计误差 脉冲响应估计值[] )1()()1()(?2 --?+=p Mz Mz p p N R k R t a N N k g 脉冲响应理论值[] 21//2 10)(T t k T t k e e T T K k g ?-?---=
脉冲响应估计误差 ()() ∑∑==-= p p N k N k g k g k g k g 1 2 1 2 )()(?)(δ 1.5 计算噪信比 信噪比()()2 2 )()(v k v y k y --=η 2 编程说明 M 序列中,M 序列循环周期取 63 126=-=p N ,时钟节拍t ?=1Sec ,幅度1=a , 特征多项式为1)(56⊕⊕=s s s F 。白噪声循环周期为32768215=。 )(s G 采样时间0T 设为1Sec ,Sec 2.6 Sec,3.8 ,12021===T T K 3 源程序清单 3.1 均匀分布随机数生成函数 function sita=U(N) %生成N 个[0 1]均匀分布随机数 A=179; x0=11; M=2^15; for k=1:N x2=A*x0; x1=mod(x2,M); v1=x1/(M+1); v(:,k)=v1; x0=x1; end sita=v; end 3.2 正态分布白噪声生成函数 function v=noise(aipi) %生成正态分布N(0,sigma)
系统辨识研究的现状_徐小平
系统辨识研究的现状 徐小平1,王 峰2,胡 钢1 (1.西安理工大学自动化与信息工程学院 陕西西安 710048;2.西安交通大学理学院 陕西西安 710049) 摘 要:综述了系统辨识问题的研究进展,介绍了经典的系统辨识方法及其缺点,引出了将集员、多层递阶、神经网络、遗传算法、模糊逻辑、小波网络等知识应用于系统辨识得到的一些现代系统辨识方法,最后总结了系统辨识今后的发展方向。 关键词:系统辨识;集员;多层递阶;神经网络;遗传算法;模糊逻辑;小波网络 中图分类号:TP27 文献标识码:B 文章编号:1004-373X (2007)15-112-05 A Survey on System Identif ication XU Xiaoping 1,WAN G Feng 2,HU Gang 1 (1.School of Automation and Information Engineering ,Xi ′an University of Technology ,Xi ′an ,710048,China ; 2.School of Science ,Xi ′an Jiaotong University ,Xi ′an ,710049,China ) Abstract :In this paper the advance in the study of system identification is summarized.First ,the traditional system identi 2fication methods and their disadvantages are introduced.Then ,some new methods based on set membership ,multi -level re 2cursive ,neural network ,genetic algorithms ,f uzzy logic and wavelet network are presented.Finally ,f urther research directions of system identification are pointed out. K eywords :system identification ;set membership ;multi -level recursive ;neural network ;genetic algorithms ;f uzzy logic ;wavelet network 收稿日期:2007-04-16 基金项目:教育部博士学科基金(20060700007); 陕西省自然科学基金(2005F15)资助项目 1 引 言 辨识、状态估计和控制理论是现代控制理论三个互相渗透的领域。辨识和状态估计离不开控制理论的支持,控制理论的应用又几乎不能没有辨识和状态估计技术。随着控制过程复杂性的提高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。然而在大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,因此利用控制理论去解决实际问题时,首先需要建立被控对象的数学模型。系统辨识正是适应这一需要而形成的,他是现代控制理论中一个很活跃的分支。社会科学和自然科学领域已经投入相当多的人力和物力去观察、研究有关的系统辨识问题。从1967年起,国际自动控制联合会(IFAC )每3年召开一次国际性的系统辨识与参数估计的讨论会。历届国际自动控制联合会的系统辨识会议均吸引了众多的有关学科的科学家和工程师们的积极参加。 系统辨识是建模的一种方法,不同的学科领域,对应 着不同的数学模型。从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。1962年,L.A.Zadeh 给出辨识这样的定义[1]:“辨识就是在输入和输出数据的基础上,从一组给定的模型类中,确定一个与所测系统等价的模型。”当然按照Zadeh 的定义,寻找一个与实际过程完全等价的模型无疑是非常困难的。而从实用性观点出发,对模型的要求并非如此苛刻,为此,对辨识又有一些实用性的定义。比如,1974年,P.E.ykhoff 给出辨识的定义[2]为:“辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统)本质特征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。”1978年,L. Ljung 给辨识下的定义[3] 更加实用:“辨识有三个要素—数 据,模型类和准则。辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。”总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。 本文首先介绍了经典的系统辨识方法,并指出其存在的缺陷,接着对近年来系统辨识的现代方法作以简单的综述,最后指出了系统辨识未来的发展方向。2 经典的系统辨识 经典的系统辨识方法[4-6]的发展已经比较成熟和完 2 11
系统辨识方法
系统辨识方学习总结 一.系统辨识的定义 关于系统辨识的定义,Zadeh是这样提出的:“系统辨识就是在输入和输出数据观 测的基础上,在指定的一组模型类中确定一个与所测系统等价的模型”。L.Ljung也给 “辨识即是按规定准则在一类模型中选择一个与数据拟合得最好的模型。出了一个定义: 二.系统描述的数学模型 按照系统分析的定义,数学模型可以分为时间域和频率域两种。经典控制理论中微 分方程和现代控制方法中的状态空间方程都是属于时域的范畴,离散模型中的差分方程 和离散状态空间方程也如此。一般在经典控制论中采用频域传递函数建模,而在现代控 制论中则采用时域状态空间方程建模。 三.系统辨识的步骤与内容 (1)先验知识与明确辨识目的 这一步为执行辨识任务提供尽可能多的信息。首先从各个方面尽量的了解待辨识的 系统,例如系统飞工作过程,运行条件,噪声的强弱及其性质,支配系统行为的机理等。 对辨识目的的了解,常能提供模型类型、模型精度和辨识方法的约束。 (2)试验设计 试验设计包括扰动信号的选择,采样方法和间隔的决定,采样区段(采样数据长度 的设计)以及辨识方式(离线、在线及开环、闭环等的考虑)等。主要涉及以下两个问 题,扰动信号的选择和采样方法和采样间隔 (3)模型结构的确定 模型类型和结构的选定是决定建立数学模型质量的关键性的一步,与建模的目的, 对所辨识系统的眼前知识的掌握程度密切相关。为了讨论模型和类型和结构的选择,引 入模型集合的概念,利用它来代替被识系统的所有可能的模型称为模型群。所谓模型结 构的选定,就是在指定的一类模型中,选择出具有一定结构参数的模型M。在单输入单 输出系统的情况下,系统模型结构就只是模型的阶次。当具有一定阶次的模型的所有参 数都确定时,就得到特定的系统模型M,这就是所需要的数学模型。 (4)模型参数的估计 参数模型的类型和结构选定以后,下一步是对模型中的未知参数进行估计,这个阶 段就称为模型参数估计。
系统辨识研究综述
系统辨识研究综述 摘要:本文综述了系统辨识的发展与研究内容,对现有的系统辨识方法进行了介绍并分析其不足,进一步引出了把神经网络、遗传算法、模糊逻辑、小波网络知识应用于系统辨识得到的一些新型辨识方法。并对基于T-S模型的模糊系统辨识进行了介绍。文章最后对系统辨识未来的发展方向进行了介绍 关键词:系统辨识;建模;神经网络;遗传算法;模糊逻辑;小波网络;T-S 模型 1.系统辨识的发展和基本概念 1.1系统辨识发展 现代控制论是控制工程新的理论基础。辨识、状态估计和控制理论是现代控制论三个相互渗透的领域。辨识和状态估计离不开控制理论的支持;控制理论的应用又几乎不能没有辨识和状态估计。 而现代控制论的实际应用不能脱离被控对象的动态特性,且所用的数学模型需要选择一种使用方便的描述形式。但很多情况下建立被控对象的数学模型并非易事,尤其是实际的物理或工程对象,它们的机理复杂且含有各种噪声,使建立数学模型更加困难。系统辨识就是应此需要而形成的一门学科。 系统辨识和系统参数估计是六十年代开始迅速发展起来的。1960年,在莫斯科召开的国际自动控制联合会(IFCA)学术会议上,只有很少几篇文章涉及系统辨识和系统参数估计问题。然而,在此后,人们对这一学科给予了很大的注意,有关系统辨识的理论和应用的讨论日益增多。七十年代以来,随着计算机的开发和普及,系统辨识得到了迅速发展,成为了一门非常活跃的学科。 1.2系统辨识基本概念的概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。 L. A. Zadeh于1962年给辨识提出了这样的定义:“辨识就是在输入和输出数据的基础上,从一组给定的模型类中,确定一个与所测系统等价的模型。”当然按照Zadeh的定义,寻找一个与实际过程完全等价的模型无疑是非常困难的。根据实用性观点,对模型的要求并非如此苛刻。1974年,P. E. ykhoff给出辨识的定义“辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统) 本质为: 特征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。而1978
遗传算法改进思路
1.粒子群算法的基本原理 粒子群算法主要有三个部分组成,第一部分是一个权值乘以粒子前一次的飞行速度计算而来,这表示种群中每个粒子对其当前自身运动状态的一种信任,因此这个权值被称为“惯性权重”或者“速度权重”;第二部分是根据种群中每个粒子当前位置与其自身所经过的最优值位置之间的距离计算而来,也就是种群粒子对自身的一种“认知”;第三部分是根据种群每个粒子当前位置与种群所有粒子所经历过的最优值位置之间的距离计算而来,表示种群粒子间信息共享与相互合作的过程,它通过认知模仿了较好同伴的运动也就是种群粒子的“社会”认知部分。 每个粒子都享有以下几个信息: (1)粒子当前的位置; (2)到当前为止每个粒子发现的最好位置即个体历史最优值位置,这个信息被当作每个粒子本身的飞行经验; (3)到目前为止整个种群中所有粒子所发现的最好位置种群全局最优值位置,这个就是整个种群所有粒子之间所共同享有的飞行经验; 所以,每个粒子的运动速度受到自身个体历史最优值位置和整个种群的全局最优值位的影响。以此,以每个粒子自身的个体历史最优值位置和整个种群的最优位置来调整当前种群中每个粒子的运动方向和速度大小,能够很好地协调好每个粒子与整个种群之间的信息交换的关系。 2改进的思路: 粒子群算法在运行过程中,如果某粒子发现一个当前最优位置,其它粒子将迅速向其靠拢,如果该最优值为局部最优点,粒子群就无法在解空间内重新搜索,算法就陷入了局部最优,出现了早熟收敛现象。 2.1加入一个惯性权重到速度更新的公式中。 W(惯性因子),其大小决定了对粒子当前速度继承的多少,合适的选择可以使粒子具有均衡的探索和开发能力。也就是起到权衡全局搜索能力和局部搜索能力。W较大时,前一速度影响较大,全局抗震搜索能力较强;较小时,局部搜索能力较弱。所以它的大小决定了搜索的步伐大小,一般在开始的时候搜索的步伐大些可以加快速度,但随着迭代次数的增加应该适当地让步伐变小进行局部搜索,这样可以避免错过最优解,从而提高解的精度。 遗传算法改进思路: 1.初始种群的选择。 如果用随机方法产生一组初始解群体,这样可能会导致初始解群体在 解空间分布不均匀,从而影响算法的性能。 (1)将解空间划分为S个子空间 (2)量化每个子空间,运用均匀数组或正交数组选择M个解 (3)从M*S个解中,选择适应度函数最大的N个作为初始解群 体。 这样就可以保证初始解群体在解空间均匀分布,从而增加获取全局最 优解的可能。 2.增加一个步骤:判断适应值的相似度,去除相似 (1)个体按适应值大小排序 (2)求平均适应度值,以些为阈值,选择适应度值大于平均适
遗传算法基本理论实例
目录 _ 一、遗产算法的由来 (2) 二、遗传算法的国内外研究现状 (3) 三、遗传算法的特点 (5) 四、遗传算法的流程 (7) 五、遗传算法实例 (12) 六、遗传算法编程 (17) 七、总结 ......... 错误!未定义书签。附录一:运行程序.. (19)
遗传算法基本理论与实例 一、遗产算法的由来 遗传算法(Genetic Algorithm,简称GA)起源于对生物系统所进行的计算机模拟研究。20世纪40年代以来,科学家不断努力从生物学中寻求用于计算科学和人工系统的新思想、新方法。很多学者对关于从生物进化和遗传的激励中开发出适合于现实世界复杂适应系统研究的计算技术——生物进化系统的计算模型,以及模拟进化过程的算法进行了长期的开拓性的探索和研究。John H.Holland教授及其学生首先提出的遗传算法就是一个重要的发展方向。 遗传算法借鉴了达尔文的进化论和孟德尔、摩根的遗传学说。按照达尔文的进化论,地球上的每一物种从诞生开始就进入了漫长的进化历程。生物种群从低级、简单的类型逐渐发展成为高级复杂的类型。各种生物要生存下去及必须进行生存斗争,包括同一种群内部的斗争、不同种群之间的斗争,以及生物与自然界无机环境之间的斗争。具有较强生存能力的生物个体容易存活下来,并有较多的机会产生后代;具有较低生存能力的个体则被淘汰,或者产生后代的机会越来越少。,直至消亡。达尔文把这一过程和现象叫做“自然选择,适者生存”。按照孟德尔和摩根的遗传学理论,遗传物质是作为一种指令密码封装在每个细胞中,并以基因的形式排列在染色体上,每个基因有特殊的位置并控制生物的某些特性。不同的基因组合产生的个体对环境的适应性不一样,通过基因杂交和突变可以产生对环境适应性强的后代。经过优胜劣汰的自然选择,适应度值高的基因结构就得以保存下来,从而逐渐形成了经典的遗传学染色体理论,揭示了遗传和变异的
系统辨识课程综述
系统辨识课程综述 通过《系统辨识》课程的学习,了解了系统辨识问题的概述及研究进展;掌握了经典的辨识理论和辨识技术及其优缺点,如:脉冲响应法、最小二乘法(LS)和极大似然法等;同时对于那些为了弥补经典系统辨识方法的不足而产生的现代系统辨识方法的原理及其优缺点有了一定的认识,如:神经网络系统辨识、基于遗传算法的系统辨识、模糊逻辑系统辨识、小波网络系统辨识等;最后总结了系统辨识研究的发展方向。 一、系统辨识概论 自40年代Wiener创建控制论和50年代诞生工程控制论以来,控制理论和工程就一直围绕着建立模型和控制器设计这两个主题来发展。它们相互依赖、相互渗透并相互发展;随着控制过程的复杂性的提高以及控制目标的越来越高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。但是大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,此时建立模型需要细致、完整地分析系统的机理和所有对该系统的行为产生影响的各种因素,从而变得十分困难。系统辨识建模正是适应这一需要而产生的,它是现代控制理论中一个很活跃的分支。 系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。所谓系统辨识,通俗地说,就是研究怎样利用对未知系统的试验数据或在线运行数据(输入/输出数据),运用数学归纳、统
计回归的方法建立描述系统的数学模型的科学。Zadeh与Ljung明确提出了系统辨识的三个要素:输入输出数据,模型类和等价准则。总之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合我们所关心的实际过程的静态或动态特性。 通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号;对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。而系统辨识亦称为实验建模方法,它是“系统分析”和“控制系统设计”的逆问题。通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。 二、经典的系统辨识 经典的系统辨识方法包括脉冲响应法、最小二乘法(LS)和极大似然法等。其中最小二乘法(LS)是应用最广泛的方法,但由于它是非一致的,是有偏差性,所以为了克服他的缺陷,形成了一些以最小二乘法为基础的系统辨识方法:广义最小二乘法(GLS)、辅助变量法(IV)、增广最小二乘法(ELS)、广义最小二乘法(GLS),以及将一般的最小二乘法与其他方法相结合的方法,有:最小二乘两步法(COR—LS)
遗传算法的基本原理
第二章 遗传算法的基本原理 2.1 遗传算法的基本描述 2.1.1 全局优化问题 全局优化问题的定义:给定非空集合S 作为搜索空间,f :S —>R 为目标函数,全局优化问题作为任务)(max x f S x ∈给出,即在搜索空间中找到至少一个使目标函数最大化的点。 全局最大值(点)的定义:函数值+∞<=)(**x f f 称为一个全局最大值,当且仅当x ? S x ∈,(ρi i b a <,i 12)定义适应度函数f(X); 3)确定遗传策略,包括群体规模,选择、交叉、变异算子及其概率。 4)生成初始种群P ; 5)计算群体中各个体的适应度值; 6)按照遗传策略,将遗传算子作用于种群,产生下一代种群; 7)迭代终止判定。 遗传算法涉及六大要素:参数编码,初始群体的设定,适应度函数的设计,遗传操作的设计,控制参数的设定,迭代终止条件。
2.1.3 遗传编码 由于GA 计算过程的鲁棒性,它对编码的要求并不苛刻。原则上任何形式的编码都可以,只要存在合适的对其进行操作的遗传算子,使得它满足模式定理和积木块假设。 由于编码形式决定了交叉算子的操作方式,编码问题往往称作编码-交叉问题。 对于给定的优化问题,由GA 个体的表现型集合做组成的空间称为问题(参数)空间,由GA 基因型个体所组成的空间称为GA 编码空间。遗传算子在GA 编码空间中对位串个体进行操作。 定义:由问题空间向GA 编码空间的映射称为编码,而有编码空间向问题空间的映射成为译码。 1)2)3)它们对1) 2) k =1,2,…,K; l =1,2,…,L; K=2L 其中,个体的向量表示为),,,(21kL k k k a a a a =,其字符串形式为kL k k k a a a s 21=,s k 称为个体a k 对应的位串。表示精度为)12/()(--=?L u v x 。 将个体又位串空间转换到问题空间的译码函数],[}1,0{:v u L →Γ的公式定义为: 对于n 维连续函数),,2,1](,[),,,,(),(21n i v u x x x x x x f i i i n =∈=,各维变量的二进制
系统辨识经典辨识方法
经典辨识方法报告 1. 面积法 辨识原理 分子多项式为1的系统 1 1 )(11 1++++= --s a s a s a s G n n n n Λ……………………………………………() 由于系统的传递函数与微分方程存在着一一对应的关系,因此,可以通过求取微分方程的系数来辨识系统的传递函数。在求得系统的放大倍数K 后,要先得到无因次阶跃响应y(t)(设τ=0)。大多数自衡的工业过程对象的y(t)可以用下式描述来近似 1)() ()()(a 111=++++--t y dt t dy a dt t y d a dt t y d n n n n K ……………………………() 面积法原则上可以求出n 为任意阶的各系数。以n=3为例,注意到 1|)(,0|)(d |)(d |)(d 23====∞→∞→∞→∞→t t t t t y dt t y dt t y dt t y …………………………() 将式()的y(t)项移至右边,在[0,t]上积分,得 ?-=++t dt t y t y a dt t dy a dt t y d a 01223 )](1[)() ()(…………………………………() 定义 ?-=t dt t y t F 01)](1[)(……………………………………………………………() 则由式()给出的条件可知,在t →∞ ?∞ -=01)](1[a dt t y ……………………………………………………………() 将式a 1y(t)移到等式右边,定义 )()]()([)() (a 201123 t F dt t y a t F t y a dt t dy t =-=+?…………………………………() 利用初始条件()当t →∞时 )(a 22∞=F …………………………………………………………………… () 同理有a 3=F 3(∞) 以此类推,若n ≥2,有a n =F n (∞) 分子、分母分别为m 阶和n 阶多项式的系统
《系统辨识》实验手册-16页文档资料
《系统辨识》 实验手册 哈尔滨工业大学控制与仿真中心 2012年8月 目录 实验1白噪声和M序列的产生---------------------------------------------------------- 2实验2脉冲响应法的实现----------------------------------------------------------------5实验3最小二乘法的实现--------------------------------------------------------------- 9 实验4递推最小二乘法的实现---------------------------------------------------------- 12附录实验报告模板----------------------------------------------------------------------16 实验1 白噪声和M序列的产生 一、实验目的 1、熟悉并掌握产生均匀分布随机序列方法以及进而产生高斯白噪声方法
2、熟悉并掌握M 序列生成原理及仿真生成方法 二、实验原理 1、混合同余法 混合同余法是加同余法和乘同余法的混合形式,其迭代式如下: 式中a 为乘子,0x 为种子,b 为常数,M 为模。混合同余法是一种递归算法,即先提供一个种子0x ,逐次递归即得到一个不超过模M 的整数数列。 2、正态分布随机数产生方法 由独立同分布中心极限定理有:设随机变量12,,....,,...n X X X 相互独立,服从同一分布,且具有数学期望和方差: 则随机变量之和1n k i X =∑的标准化变量: () n n n k k k X E X X n Y μ --= = ∑∑∑近似服从(0,1)N 分布。 如果n X 服从[0, 1]均匀分布,则上式中0.5μ=,2 1 12 σ= 。即 0.5n k X n Y -= ∑近似服从(0,1)N 分布。 3、M 序列生成原理 用移位寄存器产生M 序列的简化框图如下图所示。该图表示一个由4个双稳态触发器顺序连接而成的4级移位寄存器,它带有一个反馈通道。当移位脉冲来到时,每级触发器的状态移到下一级触发器中,而反馈通道按模2加法规则反馈到第一级的输入端。